
Zusammenfassung
Die Anzahl umrichtergespeister Antriebe steigt aufgrund der guten Regelbarkeit des Motors bei mittlerweile geringen Anschaffungskosten. Infolge der diskreten Schaltzustände der Leistungstransistoren ist der Mittelwert der drei Ausgangsspannungen eines Zweipunkt-Wechselrichters eine von Null verschiedene Gleichtaktspannung, welche als Common-Mode-Spannung bezeichnet wird. Die Gleichtaktspannung wird durch den Umrichter in die Motorwicklung eingeprägt. Über die Wicklung-Rotor-Kapazität entsteht ein Abbild der Common-Mode-Spannung auf der Motorwelle, die auch an den Motorlagern anliegt und die Durchschlagsfestigkeit des Schmierfilms der Lager überschreiten und zu Durchschlägen führen kann, welche in der Beschädigung der Motorlager resultieren.
Die Wicklung-Rotor-Kapazität setzt sich aus einem Nutschlitz- und einem Stirnraumanteil zusammen. In diesem Artikel wird eine analytische Bestimmung des Nutschlitzanteils der Wicklung-Rotor-Kapazität vorgestellt, welche neben der Geometrie des Nutschlitzes und der Geometrie des Luftspalts den Einfluss von Materialien mit unterschiedlichen Permittivitäten berücksichtigt. Die Ermittlung des Nutschlitzanteils der Wicklung-Rotor-Kapazität basiert auf der Berechnung des skalaren Potenzialfelds im Gebiet des Nutschlitzes und des Luftspalts.
Abstract
The number of inverter-fed motors is increasing due to the good controllability of the motor and the cost, which by now is low. As a result of the discrete switching states of the power transistors, the average of the three output voltages of the inverter is a common mode voltage which differs from zero. This common mode voltage is impressed into the motor winding by the inverter. An image of the common mode voltage on the motor shaft is produced via the winding rotor capacitance. This voltage appears at the motor bearings and can exceed the dielectric strength of the lubricant film of the bearings causing discharge currents and damage to the motor bearings.
The winding rotor capacity is composed of a slot as well as of an end-winding portion. In this article, an analytical determination of the slot portion of the winding rotor capacity is presented, which, in addition to the geometry of the slot and the geometry of the air gap, takes into account the influence of materials with different permittivities. The determination of the slot portion of the winding rotor capacity is based on the calculation of the scalar potential field in the area of the slot and in the area of the air gap.
Avoid common mistakes on your manuscript.
Verwendete Programme zur Erstellung der Abbildungen:
-
PowerPoint (Abb. 1, Abb. 4, Abb. 5, Abb. 6)
Abb. 1. 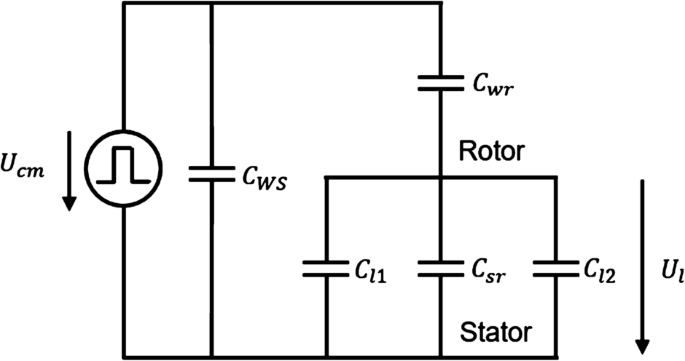
Kapazitives Ersatzschaltbild des Motors [1]
-
ANSYS Maxwell FEM (Abb. 2, Abb. 3, Abb. 7)
Abb. 2. 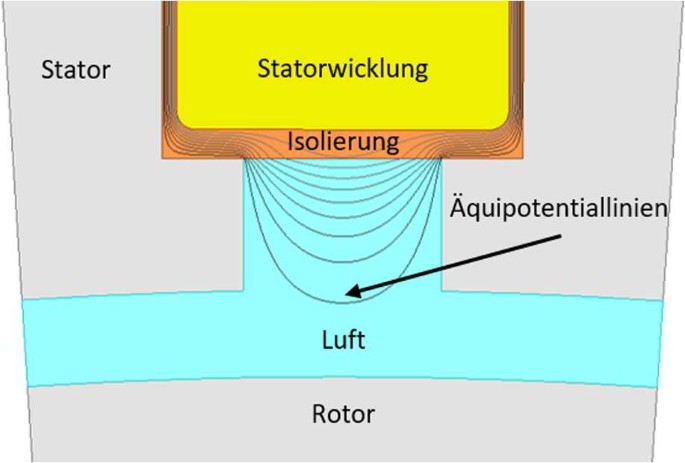
Verlauf der Äquipotentiallinien zwischen der Statorwicklung und dem Rotor unter Berücksichtigung des Statorblechs (Realisierung mittels FEM)
Abb. 3. 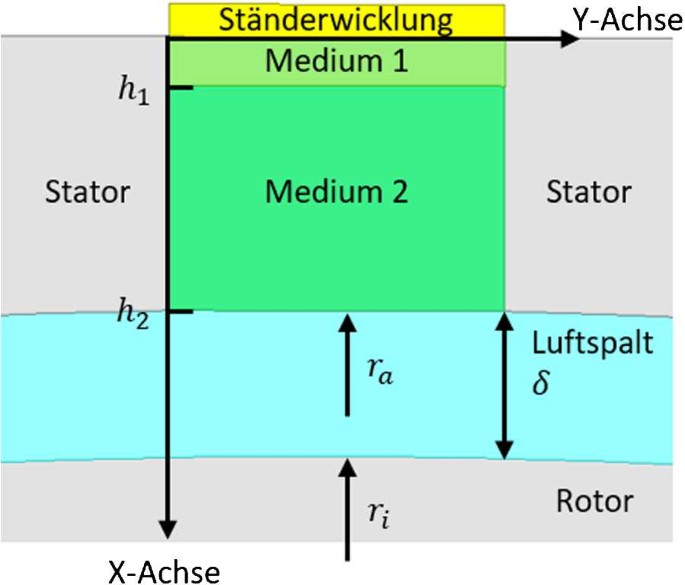
Modell der betrachteten Geometrie



1 Einleitung
Der Gebrauch von umrichtergespeisten elektrischen Antrieben kann zu EDM-Lagerströme (Electric Discharge Machining) führen, wodurch mattierte Laufspur- und Wälzkörperoberflächen, periodische Laufbahn-Riffelstrukturen und chemische Schmierstoffveränderungen entstehen können [1]. EDM-Ströme treten im Bereich der Flüssigkeitsreibung/ Vollschmierung bei der Überschreitung der kritischen Feldstärke des Schmierfilms im Wälzlager auf und resultieren aus der Entladung der Lagerkapazität [2]. Die Lagerspannung \(U_{l}\) ist das Abbild der Common-Mode-Spannung \(U_{cm}\) und kann mittels des kapazitiven Spannungsteilers
berechnet werden [3].
Der in Abb. 1 dargestellte kapazitive Spannungsteiler, welcher parallel zu der Wicklung-Stator-Kapazität \(C_{ws}\) verschaltet ist, setzt sich aus der Wicklung-Rotor-Kapazität \(C_{wr}\), der Stator-Rotor-Kapazität \(C_{sr}\) sowie den Kapazitäten der zwei Lager \(C_{l1}\) und \(C_{l2}\) zusammen. Entscheidend für den Betrag der anliegenden Lagerspannung ist die Wicklung-Rotor-Kapazität, welche sich aus dem Nutschlitz- und dem Stirnraumanteil des Motors zusammensetzt. Die aktuelle analytische Bestimmung des Nutschlitzanteils der Wicklung-Rotor-Kapazität basiert auf der Berechnung eines Plattenkondensators [1, 4,5,6]. Für die Berücksichtigung von unterschiedlichen Materialien wird eine Reihenschaltung von Plattenkondensatoren mit den jeweiligen Dielektrizitätszahlen angewendet. Auf Grund der signifikanten Abweichung zwischen den berechneten und den mittels FEM-Software numerisch bestimmten Kapazitätswerten werden in [1] und [6] Korrekturfunktionen eingeführt.
Das grundlegende Problem bei der Anwendung der Berechnungsvorschrift eines Plattenkondensators ist die zur Herleitung verwendete Randbedingung, dass die ebenen Platten unendlich ausgedehnt sind. Hierdurch ergibt sich ein eindimensionales Potentialproblem. Die Randbedingung führt zu einem konstanten Betrag des elektrischen Felds im gesamten Raumgebiet. Die Äquipotentiallinien verlaufen folglich parallel zu den Platten. In Abb. 2 sind die Äquipotentiallinien zwischen der Statorwicklung und dem Rotor im Gebiet einer bespielhaften Nutteilung dargestellt.
Die Äquipotentiallinien verlaufen im Nutschlitz auf Grund des Einflusses des Statorblechs weder parallel zum Rotor noch parallel zur Statorwicklung. Zudem ist die Grenzschicht zwischen dem Isolationsmaterial und dem Nutschlitz keine Äquipotentiallinie, sodass eine Reihenschaltung von Plattenkondensatoren nicht angewendet werden kann. Der Verlauf des Potentials von der Wicklung zum Rotor ist nichtlinear, sodass der entsprechende Verlauf des elektrischen Felds nicht konstant ist.
Um den Einfluss des Statorblechpakets in der Berechnung des Nutschlitzanteils der Wicklung-Rotor-Kapazität zu berücksichtigen, kann stattdessen ein beschränktes, zweidimensionales Feldproblem gelöst werden.
2 Modellierung und Berechnung des Nutschlitzanteils der Wicklung-Rotor-Kapazität
In der Elektrostatik gilt es, für die Bestimmung des skalaren Potentialfelds \(\varphi \) in einem betrachteten Raumgebiet mit linearen, isotropen und homogenen Materialien die Poisson-Gleichung
mit der Ladungsdichte \(\rho \) und der Permittivität \(\epsilon \) zu lösen [7]. Sofern keine Raumladungen in dem Gebiet vorhanden sind, vereinfacht sich (2) zur Laplace-Gleichung
Eine der wichtigsten Methoden zur analytischen Behandlung von partiellen Differentialgleichungen ist die sogenannte Separationsmethode [8]. Hierbei wird in dem gewählten Koordinatensystem die partielle Differentialgleichung mittels eines Produktansatzes in gewöhnliche Differentialgleichungen überführt. Abschließend erfolgt die Anpassung der Lösung an die gestellten Randbedingungen. Die modellierte Geometrie kann der Abb. 3 entnommen werden.
Sie setzt sich aus einem Nutgebiet mit konstanter Breite und einem Luftspaltbereich zusammen. Für den Nutbereich wird das kartesische Koordinatensystem und für das Luftspaltgebiet das Polarkoordinatensystem gewählt. Die Lösung des Feldproblems für die zwei Bereiche erfolgt auf Grund der unterschiedlich gewählten Koordinatensysteme getrennt voneinander.
Die Bestimmung der Wicklung-Rotor-Kapazität erfolgt mit Hilfe der maxwellschen Kapazitätskoeffizienten, mit welchen der Kapazitätsbegriff auf Systeme übertragen werden kann, die aus mehreren voneinander isolierten Elektroden bestehen [8]. Als Elektroden werden in der vorliegenden Problemstellung die Statorwicklung mit der Ladung \(Q_{w}\) und dem Potential \(\varphi _{w}\), das Statorblechpaket mit der Ladung \(Q_{s}\) und dem Potential \(\varphi _{s}\) sowie der Rotor mit der Ladung \(Q_{r}\) und dem Potential \(\varphi _{r}\) betrachtet. Die entsprechende Kapazitätskoeffizientenmatrix lautet
Die Kapazitätskoeffizienten \(c_{\mu v}\) entsprechen bei Gegenkapazitäten \(\mu \neq v\) den Kapazitäten \(C_{\mu v}\), welche einen Zusammenhang zwischen den Ladungen und den Potentialdifferenzen herstellen. Durch die Wahl eines Stator- und eines Rotorpotentials von jeweils null Volt ergibt sich nach (4) die Wicklung-Rotor-Kapazität \(C_{wr}\) zu
Insgesamt liegen dem Berechnungsmodell folgende Vereinfachungen zugrunde:
-
Die Statorwicklung, das Statorblechpaket und der Rotor sind elektrisch ideal leitfähig.
-
Der Stator besitzt offene, rechteckförmige Nutschlitze mit konstanter Breite.
-
Die Statorwicklung liegt am Nutverschluss an.
-
Innerhalb des betrachteten Gebiets befinden sich keine Raumladungen.
-
Die Medien innerhalb der betrachteten Geometrie bestehen aus Materialien mit konstanter Permittivität.
-
Der Rotor ist ungenutet.
2.1 Lösung des Feldproblems im Nutbereich
Das vereinfachte Nutgebiet mit konstanter Breite kann der Abb. 4 entnommen werden. Die Aufteilung der Geometrie in drei Bereiche dient der Berücksichtigung von Materialien mit unterschiedlichen dielektrischen Eigenschaften. Der dritte Bereich, welcher in X-Richtung unendlich ausgedehnt ist, symbolisiert das Gebiet des Luftspalts. Die Begrenzungen in Y-Richtung des Nutgebiets berücksichtigen den Einfluss des geerdeten Statorblechpakets, welches in diesem Modell ein Potential von null Volt besitzt. Der erste Raumbereich grenzt an die Statorwicklung, welche das konstante Potential \(\varphi _{w}\) trägt.

Darstellung des Nutgebiets mit Randbedingungen
Die Anwendung des Laplace-Operators im zweidimensionalen kartesischen Koordinatensystem ergibt
Durch Einsetzen des gewählten Produktansatzes
in die Laplace-Gleichung (6)
und anschließendes Dividieren durch den Produktansatz (7) ergibt sich
Die Summanden der Gleichung (9) sind konstante Funktionen, und mittels der Definitionen
zerfällt unter Berücksichtigung der Nebenbedingung
die partielle Differentialgleichung (6) in die zwei entkoppelten, gewöhnlichen Differentialgleichungen (10) und (11). Aus den Lösungen der homogenen und linearen Differentialgleichungen mit konstanten Koeffizienten ergeben sich die allgemeinen Lösungen der Laplace-Gleichung für die drei betrachteten Bereiche
Die Bestimmung der Koeffizienten und Konstanten erfolgt mit Hilfe der gestellten Randbedingungen
und unter Berücksichtigung der Stetigkeitsbedingungen des Potentials sowie der Normalkomponente des D-Felds an den Materialgrenzen
Der Koeffizient \(A_{3}\) des dritten Bereichs muss nach Randbedingung (16) null sein. Für alle drei Bereiche gilt nach der Randbedingung auf der X-Achse
Die Randbedingungen auf der zur X-Achse parallelen Ebene führen anschließend zu den Gleichungen
und abschließend unter Berücksichtigung der Nebenbedingung (12) zur Bestimmung der Konstanten
Für jedes Teilgebiet kann auf Grund der Linearität der Laplace-Gleichung eine allgemeinere Lösung konstruiert werden [9]. Die Exponentialterme in Y-Richtung der Potentialfelder (13) bis (15) können unter Berücksichtigung der Eulerformel durch Sinus-Funktionen ersetzt werden gemäß
mit
und
Für jedes Potentialfeld kann eine Dämpfung in X-Richtung und eine Reihe aus Schwingungen in Y-Richtung identifiziert werden. Bei der fehlenden Randbedingung (23) des ersten Gebiets
handelt es sich um die Fourier-Reihe einer Sinusfunktion. Der Gleichanteil und die Kosinusfunktionen der Fourier-Reihe entfallen bei der Entwicklung einer ungeraden, mittelwertfreien Funktion, sodass die Randbedingung (23) mit \(- \varphi _{w}\) im Intervall \(( b_{ns},2 \cdot b_{ns}] \) ungerade erweitert wird. Der Fourier-Koeffizient \(\tilde{F}_{1}\) berechnet sich zu
Die Stetigkeitsbedingungen des Potentials (24) und (25) führen zu den Gleichungen
und die Differenzierbarkeitsbedingungen (26) und (27) zu
Die unbekannten Konstanten \(\tilde{A}_{1}\), \(\tilde{B}_{1}\), \(\tilde{A}_{2}\), \(\tilde{B}_{2}\) und \(\tilde{B}_{3}\) der Potentialfelder der drei Bereiche (35) bis (37) können mit Hilfe der Gleichungen (43) bis (47) bestimmt werden.
In der Abb. 5 sind die analytisch berechneten Äquipotentialflächen des FEM-Modells aus Abb. 2 dargestellt. Unterteilt ist das Modell in den Bereich der Isolierung, des Nutschlitzes und des Luftspalts. Beiden Abbildungen kann der durch den Einfluss des Statorblechpakets hervorgerufene, konvexe Verlauf der Äquipotentiallinien entnommen werden. Die konvexen Wiederholungen auf der Y-Achse im ersten Bereich entstehen durch die Anwendung der Fourier-Reihe.

Darstellung der analytisch berechneten Äquipotentialflächen des FEM-Modells aus Abb. 2
2.2 Lösung des Luftspaltbereichs und Berechnung der Kapazität
Das vereinfachte Luftspaltgebiet kann der Abb. 6 entnommen werden. Der Bereich erstreckt sich in radialer Richtung über die Luftspaltlänge \(\delta \). In azimutaler Richtung wird eine Nutteilung
in Radiant betrachtet. Der Innenradius \(r_{i}\) des Modells ist der Außenradius des Rotors, der Außenradius \(r_{a}\) symbolisiert den Bohrungsradius des Antriebs. Der Nutschlitz mit der Breite \(b_{ns}\) erstreckt sich über den Winkel \(\alpha _{ns}\). Die Mitte des Nutschlitzes befindet sich in der Mitte der betrachteten Nutteilung.

Darstellung des Luftspaltgebiets mit Randbedingungen
Außerhalb des Nutschlitzes trägt das Statorblechpaket, wie im zuvor betrachteten Nutbereich, ein Potential von null Volt. Am Übergang zwischen dem Nutschlitz und dem Luftspalt liegt nach (36) in Y-Richtung eine Potentialwelle vor, sodass über den Winkel des Nutschlitzes \(\alpha _{ns}\) ein sinusförmiges Potential mit der Amplitude
angenommen wird. Die Amplitude \(\hat{\varphi }_{ns}\) ist somit die vom Nutmodell berechnete Eingangsgröße des Luftspaltmodells. Der Rotor wird mit einem Potential von null Volt beaufschlagt. Die Begrenzungen des Modells in azimutaler Richtung tragen aus Gründen der Vereinfachung zusätzlich ein Potential von null Volt.
Die Anwendung des Laplace-Operators im zweidimensionalen Polarkoordinatensystem ergibt
Durch Einsetzen des gewählten Produktansatzes
in die Laplace-Gleichung (50)
und anschließendes Dividieren durch den Produktansatz (51) ergibt sich nach kurzer Umformung
Die separierten Summanden der Gleichung (53) sind konstante Funktionen, und mittels der Definitionen
zerfällt unter Berücksichtigung der Nebenbedingung
die partielle Differentialgleichung (50) in die zwei entkoppelten, gewöhnlichen Differentialgleichungen (54) und (55). Die Lösung der vom Radius abhängigen Differentialgleichung erfolgt mit Hilfe der Euler-Differentialgleichung, sodass sich die allgemeine Lösung der Laplace-Gleichung für den betrachteten Raumbereich zu
ergibt. Die Bestimmung der Koeffizienten und Konstanten erfolgt mit Hilfe der gestellten Randbedingungen
Der Koeffizient \(B_{4}\) kann bei Verwendung der Randbedingung (60) mit Hilfe des Koeffizienten \(A_{4}\) substituiert werden gemäß
Die Randbedingungen (58) und (59) führen wie im Nutbereich zu einem sinusförmigen Verlauf des Potentials in azimutaler Richtung
mit
und
Zur Bestimmung der Potentialfunktion auf dem Außenradius des Bereichs wird die im Nutschlitz geforderte sinusförmige Potentialfunktion in die Mitte der Nutteilung \(\tau _{n} '\) verschoben als
Bei der fehlenden Randbedingung (61) des Raumgebiets
handelt es sich wie im Nutschlitzbereich um die Fourier-Reihe einer Sinusfunktion, sodass die Randbedingung (61) im Intervall \(( \tau _{n} ',2\cdot \tau _{n} ' ]\) ungerade erweitert wird. Der Fourier-Koeffizient \(\tilde{F}_{4}\) berechnet sich zu
Mit der Lösung des bestimmten Integrals (69) ist die Potentialfunktion (63) bekannt. Zur Bestimmung der Wicklung-Rotor-Kapazität wird zu Beginn die Oberflächenladungsdichte \(\sigma _{r}\) mit Hilfe des elektrischen Feldes \(\overrightarrow{E}_{4}\)
und des Flächennormalenvektors \(\overrightarrow{n}\) des Rotors berechnet zu
Die Ladung auf dem Rotor berechnet sich mit Hilfe des Flächenintegrals der Oberflächenladungsdichte über die Länge \(l_{fe}\) in Z-Richtung des Antriebs als
Die Wicklung-Rotor-Kapazität einer Nutteilung ergibt sich nach (5) zu
3 Validierung des Modells
Die Validierung des Modells erfolgt mit Hilfe von FEM-Software. Die fünf untersuchten Variationen, welche sich hinsichtlich ihrer Geometrien und Materialeigenschaften unterscheiden, können der Tab. 1 entnommen werden. Das für die Simulation verwendete Wicklungspotential, welches keinen Einfluss auf den Wert der Wicklung-Rotor-Kapazität besitzt, beträgt ein Volt. Die Motor-Blechpaketlänge in Z-Richtung \(l\) wird für alle Anordnungen auf einen Meter festgelegt.
Das FEM-Modell der dritten Variante kann der Abb. 7 entnommen werden.

FEM-Modell der dritten Variante
Die Tab. 2 enthält die analytisch berechneten und die numerisch bestimmten Scheitelwerte der Potentiale am Übergang zwischen Nutschlitz und Luftspalt sowie die Wicklung-Rotor-Kapazitäten. Die Abweichungen liegen im einstelligen Prozentbereich. Die Fehler in den mit Hilfe des Nutgebiets berechneten Scheitelpotentialen sind durch die nicht analytisch geschlossene Lösung des betrachteten Bereichs zu begründen. Zusätzlich entstehen Abweichungen durch die Vorgabe von Dirichlet-Randbedingungen in azimutaler Richtung im Luftspaltgebiet. Grundsätzlich liegen an den beiden Grenzen Neumann-Randbedingungen vor, welche zu einer periodischen Wiederholung des Potentials am Umfang entsprechend der Statornutenzahl führen.
4 Einfluss der Permittivität auf die Wicklung-Rotor-Kapazität
Die Wahl der Dielektrika beeinflusst die Amplitude des Potentials am Übergang zwischen dem Nutschlitz und dem Luftspalt \(\hat{\varphi }_{ns}\). Anhand von Gleichung (74) kann nachgewiesen werden, dass die Wicklung-Rotor-Kapazität bei gleichbleibender Geometrie linear mit zunehmender Amplitude des Potentials \(\hat{\varphi }_{ns}\) ansteigt. Für die Untersuchung des Einflusses der dielektrischen Eigenschaften der Medien im Nutmodell auf die Wicklung-Rotor-Kapazität genügt es somit, die Abhängigkeit der Potentialamplitude \(\hat{\varphi }_{ns}\) von den Permittivitäten der Medien zu betrachten. Auf Grundlage der Stetigkeit des Potentials wird das Potential \(\hat{\varphi }_{ns}\) mit Hilfe des skalaren Potentialfelds des Luftspaltbereichs des Nutmodells
berechnet. Das Amplitudenspektrum des Fourier-Koeffizienten \(\tilde{F}_{3}\) setzt sich aus einer dominierenden Grundwelle und signifikant geringeren Oberwellen zusammen. Aus diesem Grund wird im Folgenden die Abhängigkeit des Fourier-Koeffizienten der Grundwelle von den Permittivitäten des ersten und zweiten Bereichs des Nutmodells untersucht. Der entsprechende Verlauf für die in Tab. 1 enthaltene erste Variante kann der Abb. 8 entnommen werden.

Fourier-Koeffizient der Grundwelle in Abhängigkeit von den relativen Permittivitäten der 1. Variante
Die relativen Permittivitäten der zwei Bereiche werden von eins bis zehn variiert. Das in der Simulation verwendete Wicklungspotential beträgt ein Volt. Die minimale Potentialamplitude am Übergang zwischen dem Nutschlitz und dem Luftspalt ergibt sich bei der Verwendung einer möglichst niedrigen Permeabilität im ersten Bereich und einer möglichst hohen Permeabilität im zweiten Bereich. Eine hohe Permeabilität im ersten Bereich führt zu einer steigenden Potentialamplitude. Der Verlauf der Äquipotentialflächen für eine nach Abb. 8 maximalen bzw. eine minimale Potentialamplitude am Nutschlitz sind der Abb. 9 zu entnehmen. Für eine maximale Potentialamplitude beträgt der Wert der relativen Permeabilität im ersten Bereich 10 und im zweiten Bereich 3,6.

Verlauf der Äquipotentiallinien für eine maximale (oben) und eine minimale (unten) Potentialamplitude der 1. Variante
Die minimale Potentialamplitude ergibt sich bei Verwendung einer relativen Permeabilität im ersten Bereich von 1 und im zweiten Bereich von 10. Der maximale Fourier-Koeffizient der Grundwelle beträgt 114,7 mV und der minimale Fourier-Koeffizient der Grundwelle beträgt 19,5 mV. Die ursprünglich analytisch berechnete, in Tab 2 enthaltene Potentialamplitude beträgt 75,77 mV.
In der oberen Darstellung mit der maximalen Potentialamplitude ist im ersten und im zweiten Bereich eine Streckung der Äquipotentialflächen in den nachfolgenden Bereich zu erkennen. In der Darstellung mit der minimalen Potentialamplitude ist hingegen eine ausgeprägte Stauchung der Äquipotentialflächen im ersten und eine Streckung im zweiten Bereich zu erkennen.
Die Stauchung im ersten Bereich der unteren Darstellung führt zu einer deutlichen Reduzierung des Potentials im zweiten Bereich. Demgegenüber ist die Reduzierung des Potentials im Verlauf des ersten Bereichs in der oberen Darstellung auf Grund der Streckung der Äquipotentialflächen signifikant geringer. Grundsätzlich gilt, dass in einem Bereich mit einer gegenüber dem nachfolgenden Bereich geringeren Permittivität eine Stauchung der Äquipotentiallinien erfolgt. Gleichzeitig erfolgt in einem Bereich mit einer gegenüber dem nachfolgenden Bereich höheren Permittivität eine Streckung der Äquipotentialflächen. Je deutlicher sich die Permittivitäten der angrenzenden Bereiche unterscheiden, desto größer ist der Effekt der Streckung oder Stauchung. Die Permittivität im zweiten Bereich der oberen Darstellung für eine maximale Potentialamplitude ist nicht minimal, da andernfalls die Permittivitäten des zweiten und des dritten Bereichs identisch wären und sich somit keine Streckung der Äquipotentialflächen vom zweiten in den dritten Bereich ausbilden würde.
Die gewünschte Stauchung der Äquipotentialflächen, welche mittels eines gezielten Einsatzes von Materialien mit hohen oder niedrigen Permittivitäten realisiert werden kann, führt zu einer Reduzierung des Nutschlitzanteils der Wicklung-Rotor-Kapazität.
Für die weiteren in Tab. 1 enthaltenen Varianten ergibt sich ein zu Abb. 8 qualitativ vergleichbarer Verlauf des Fourier-Koeffizienten der Grundwelle.
5 Schlussfolgerungen und Ausblick
Diese Arbeit präsentiert eine einfache analytische Berechnung des Nutschlitzanteils der Wicklung-Rotor-Kapazität. Die Bestimmung basiert auf der Separationsmethode zur Lösung der Laplace-Gleichung eines zweidimensionalen Gebiets. Die Feldprobleme im Nutschlitz- und im Luftspaltbereich werden auf Grund der Wahl von unterschiedlichen Koordinatensystemen getrennt gelöst. Hierzu wird zu Beginn das Potentialfeld des Nutbereichs ermittelt und das Potential am Übergang zwischen Nutschlitz und Luftspalt bestimmt. Anschließend erfolgt die Berechnung der Wicklung-Rotor-Kapazität mit Hilfe des Übergangspotentials. Der Nutbereich besteht aus zwei Medien mit unterschiedlichen Permittivitäten. Eine Erweiterung auf mehrere Medien ist durch die sich wiederholenden Randbedingungen problemlos möglich.
Mit Hilfe des vorgestellten Modells kann die Auswirkung von unterschiedlichen Geometrien und Materialien auf den Nutschlitzanteil der Wicklung-Rotor-Kapazität bestimmt werden.
Die Analyse des Einflusses der im Nutbereich vorhandenen Materialien auf die Wicklung-Rotor-Kapazität ergibt, dass sich die Kapazität durch den Einsatz von Werkstoffen mit hohen oder niedrigen Permittivitäten gezielt reduzieren lässt. Aktuelle Untersuchungen mit einem erweiterten 4- und 5-Schichten-Modell zeigen, dass das spezifische Einbringen eines zusätzlichen Materials, welches in Abhängigkeit von den in der Nut und dem Nutschlitz vorhandenen Werkstoffen eine hohe oder eine niedrige Permittivität aufweist, zu einer Reduktion des Nutschlitzanteils der Wicklung-Rotor-Kapazität führt.
Change history
20 July 2021
Zu diesem Beitrag wurde ein Erratum veröffentlicht: https://doi.org/10.1007/s00502-021-00906-0
Literatur
Tischmacher, H. (2017): Systemanalysen zur elektrischen Belastung von Wälzlagern bei umrichtergespeisten Elektromotoren. Hannover: Dissertation, Leibniz Universität
Furtmann, A. (2017): Elektrisches Verhalten von Maschinenelementen im Antriebsstrang. Dissertation, Leibniz Universität Hannover
Magdun, O., Gemeinder, Y., Binder, A., Reis, K. (2011): Calculation of bearing and common-mode voltages for the prediction of bearing failures caused by EDM currents. In 8th IEEE symposium on diagnostics for electrical machines (S. 462–467). Bologna: Power Electronics & Drives.
Mütze, A. (2004): Bearing currents in inverter fed AC-motors. Dissertation, TU Darmstadt
Ma, X., Liu, R., Zheng, B., Zhang, Y. (2012): Analysis and calculation of capacitance parameters in induction machines to predict shaft voltage. In 15th international conference on electrical machines and systems (ICEMS), Sapporo (S. 1–5).
Ahola, J., Muetze, A., Niemelä, M., Romanenko, A. (2019): Normalization-based approach to electric motor BVR related capacitances computation. IEEE Trans. Ind. Appl., 55(3), 2770–2780.
Lehner, G. (2009): Elektromagnetische Feldtheorie. 6. Aufl. Berlin Heidelberg: Springer.
Küpfmüller, K., Mathis, W., Reibiger, A. (2013): Theoretische Elektrotechnik eine Einführung. 19. aktualisierte Aufl. Berlin: Springer.
Griffiths, D. (2018): Elektrodynamik eine Einführung. 4. aktualisierte Aufl. Upper Saddle River: Pearson Education.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Additional information
Hinweis des Verlags
Der Verlag bleibt in Hinblick auf geografische Zuordnungen und Gebietsbezeichnungen in veröffentlichten Karten und Institutsadressen neutral.
Die originale Onlineversion dieses Artikels wurde aufgrund einer rückwirkenden Open Access-Bestellung geändert.
Rights and permissions
Open Access Dieser Artikel wird unter der Creative Commons Namensnennung 4.0 International Lizenz veröffentlicht, welche die Nutzung, Vervielfältigung, Bearbeitung, Verbreitung und Wiedergabe in jeglichem Medium und Format erlaubt, sofern Sie den/die ursprünglichen Autor(en) und die Quelle ordnungsgemäß nennen, einen Link zur Creative Commons Lizenz beifügen und angeben, ob Änderungen vorgenommen wurden. Die in diesem Artikel enthaltenen Bilder und sonstiges Drittmaterial unterliegen ebenfalls der genannten Creative Commons Lizenz, sofern sich aus der Abbildungslegende nichts anderes ergibt. Sofern das betreffende Material nicht unter der genannten Creative Commons Lizenz steht und die betreffende Handlung nicht nach gesetzlichen Vorschriften erlaubt ist, ist für die oben aufgeführten Weiterverwendungen des Materials die Einwilligung des jeweiligen Rechteinhabers einzuholen. Weitere Details zur Lizenz entnehmen Sie bitte der Lizenzinformation auf http://creativecommons.org/licenses/by/4.0/deed.de.
About this article

Cite this article
Stockbrügger, J.O., Ponick, B. Analytische Ermittlung des Nutschlitzanteils der Wicklung-Rotor-Kapazität zur Vorausberechnung von Lagerspannungen in elektrischen Maschinen. Elektrotech. Inftech. 137, 188–195 (2020). https://doi.org/10.1007/s00502-020-00798-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00502-020-00798-6