
Abstract
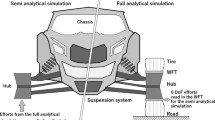
Input loads are essential for the numerical simulation of vehicle multibody system (mbs) models. Such load data is called invariant, if it is independent of the specific system under consideration. A digital road profile, e.g., can be used to excite mbs models of different vehicle variants. However, quantities obtained by measurement such as wheel forces are typically not invariant in this sense. This leads to the general task to derive invariant loads on the basis of measurable, but system-dependent quantities. Mathematically, this can be formulated as an optimal control problem. We present a strategy to solve this problem and an application to an off-road driving simulation of a Porsche Cayenne model.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others

References
Adams, M.D.: MSC. Software GmbH. Munich, Germany (2010)
Betts, J.T.: Practical Methods for Optimal Control Using Nonlinear Programming. Society for Industrial and Applied Mathematics, Philadelphia (2001)
Blajer, W., Kolodziejczyk, K.: A geometric approach to solving problems of control constraints: Theory and a DAE framework. Multibody Syst. Dyn. 11, 343–364 (2004)
Burger, M., Dressler, K., Marquardt, A., Speckert, M.: Calculating invariant loads for system simulation in vehicle engineering. In: Multiobody Dynamics 2009 ECCOMAS Thematic Conference. Warsaw (2009)
Burger, M., Speckert, M., Dressler, K.: Optimal control methods for the calculation of invariant excitation signals for multibody systems. In: The 1st Joint International Conference on Multibody System Dynamics. Lappeenranta (2010)
Hairer, E., Wanner, G.: Solving Ordinary Differential Equations II. Springer, Berlin (1996)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2012 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Burger, M., Dreßler, K., Marquardt, A., Morr, M., Witte, L. (2012). Invariant Loading for Full Vehicle Simulation. In: Günther, M., Bartel, A., Brunk, M., Schöps, S., Striebel, M. (eds) Progress in Industrial Mathematics at ECMI 2010. Mathematics in Industry(), vol 17. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-25100-9_67
Download citation
DOI: https://doi.org/10.1007/978-3-642-25100-9_67
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-25099-6
Online ISBN: 978-3-642-25100-9
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)