
Abstract
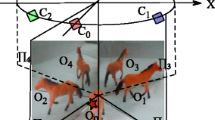
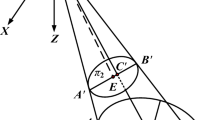
Based on analyzing and partially testing the current methods for camera calibration in computer vision, inspired by Zhang’s technique, we introduced a new method for binocular stereovision camera calibration. In this method, a planar object with a series of circles was used as calibration template, and the centers of circles were regarded as control points. The proposed method requires the two cameras with relatively fixed position to simultaneously observe the calibration template at a few (at least two) different orientations by moving the cameras or planar object freely, then extracts the centers’ coordinates of circles or ellipses by image processing technique. On this basis, calculate every camera’ intrinsic and extrinsic parameters, then calculate the position parameters of the two cameras. The main point of this method is that it can match the points in the model plane and their image points easily; compared with Zhang’s calibration methods, it can reduce the errors of extracting control points. Experimental results and contrast tests show proposed method is accurate and very applicative to camera calibration of binocular stereovision system.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others

References
Abdel-Aziz, Y.I., Karara, H.M.: Direct Linear Transformation into Object Space Coordinates in Close-range Photogrammetry. In: American Society of Photogrammetry Symposium on Close-Range Photogrammetry, pp. 1–18. The University of Illinois Press, Urbana (1971)
Zhang, Z.: A Flexible New Technique for Camera Calibration. IEEE Trans. Pattern Analysis and Machine Intelligence 22(11), 1330–1334 (2000)
Weng, J., Cohen, P., Herniou, M.: Cameras Calibration with Distortion Models and Accuracy Evaluation. IEEE Trans. Pattern Analysis and Machine Intelligence. 14(10), 965–980 (1992)
Stephen, J., Maybankolivier, D., Faugeras: A Theory of Self-Calibration of a Moving Camera. Int. J. Comput Vision 8(2), 123–151 (1992)
Smith, L.N., Smith, M.L.: Automatic Machine Vision Calibration Using Statistical and Neural Network Methods. Image Vision Comput. 23(10), 887–899 (2005)
Chaohui, L., Zhaoyang, Z., Ping, A.: Camera Calibration for Stereo Vision Based on Neutal Network. Chinese Journal of Mechanical Engineerion 39(9), 93–96 (2003)
Liu, J.-s., Yuan, S.-c., Zhang, Q.-y., Liu, D.-h.: Research on Camera Calibration in Binocular Stereo Vision. Computer Engineering and Applications 44(6), 237–239 (2008)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2011 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Zhao, P., Li, Yk., Chen, Lj., Bai, Xw. (2011). Camera Calibration Technology Based on Circular Points for Binocular Stereovision System. In: Yu, Y., Yu, Z., Zhao, J. (eds) Computer Science for Environmental Engineering and EcoInformatics. CSEEE 2011. Communications in Computer and Information Science, vol 158. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-22694-6_50
Download citation
DOI: https://doi.org/10.1007/978-3-642-22694-6_50
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-22693-9
Online ISBN: 978-3-642-22694-6
eBook Packages: Computer ScienceComputer Science (R0)