
Abstract
Localization—the process by which the positions of the nodes of a Wireless Sensor Network (WSN) are found with respect to some absolute or relative frame of reference—is fundamental to how the WSN performs at executing its functions.
This is a preview of subscription content, log in via an institution.
Buying options
Tax calculation will be finalised at checkout
Purchases are for personal use only
Learn about institutional subscriptionsNotes
- 1.
We focus on these four main methods; however, there exist several derivatives of these methods in the literature.
References
I. Amundson and X. Koustsoukos, “A Survey on Localization for Mobile Wireless Sensor Networks,” in MELT’09 Proceedings of the 2nd international conference on Mobile entity localization and tracking in GPS-less environments, 2009.
J. Bachrach and C. Taylor, “Localization in Sensor Networks,” in Handbook of Sensor Networks: Algorithms and Architectures, Hoboken, John Wiley & Sons, Inc., 2005.
N. Bulusu, J. Heidemann and D. Estrin, “GPS-less low-cost outdoor localization for very small devices,” IEEE Personal Communications, vol. 7, no. 5, pp. 28–34, 2000.
W.P. Chen, J. Hou and L. Sha, “Dynamic clustering for acoustic target tracking in wireless sensor networks,” IEEE Transactions on Mobile Computing, vol. 3, no. 3, pp. 258–271, 2004.
R. Fuller, “Tutorial on Location Determination by RF Means,” Proc. the 2 nd International Workshop on Mobile Entity Localization and Tracking in GPS-less Environments, MELT, Orlando, Florida, 2009.
T. He, C. Huang, B.M. Blum, J.A. Stankovic and T. Abdelzaher, “Range-free localization schemes for large scale sensor networks,” Proc. of the 9th International Conference on Mobile Computing and Networking, New York, 2003.
H.T. Kung and D. Vlah, “Efficient Location Tracking Using Sensor Networks,” Proc. of 2003 IEEE Wireless Communications, 2003.
B. Kusy, J. Sallai, G. Balogh, A. Ledeczi, V.-d. Protopopescu, J. Tolliver, F. DeNap and M. Parang, “Radio interferometric tracking of mobile wireless nodes,” Proc. of the 5th International Conference on Mobile Systems, Applications and Services, 2007.
E.D. Manley, H.A. Nahas and J.S. Deogun, “Localization and Tracking in Sensor Systems,” in Proc. Sensor Networks, Ubiquitous, and Trustworthy Computing, International Conference, 2006.
G. Mao, B. Fidan and B.D. Anderson, “Wireless Sensor Network Localization Techniques,” Computer Networks: The International Journal of Computer and Telecommunications Networking, vol. 51, no. 10, pp. 2529–2553, 2007.
D. Niculescu and B. Nath, “Ad hoc positioning system (APS) using AOA,” Proc. 22 nd Annual Joint Conference of the IEEE Computer and Communications, 2003.
A.T. Parameswaran, M.I. Husain and S. Upadhyaya, “Is RSSI a reliable parameter in sensor localization algorithms: An experimental study,” Field Failure Data Analysis Workshop, 2009.
M. R. Gholami, Positioning Algorithms for Wireless Sensor Networks, Gothenburg, Ph.D. Dissertation, Department of Signals and Systems, Chalmers University of Technology, 2011.
M. Rabbat and R. Nowak, “Distributed optimization in sensor networks,” Proc. the 3rd International Symposium on Information Processing in Sensor Networks, 2004.
F. Reichenbach, J. Salzmann, D. Timmermann, A. Born and R. Bill, “DLS: A Resource-Aware Localization Algorithm with High Precision in Large Wireless Sensor Networks,” Proc. 4 th Workshop on Positioning, Navigation and Communication, Hannover, 2007.
K. Römer, “The Lighthouse Location System for Smart Dust,” Proc. the 1 st International Conference on Mobile Systems, Applications and Services, 2003.
M.L. Sichitiu and V. Ramadurai, Localization of Wireless Sensor Networks with a Mobile Beacon, 3 ed., Technical Report TR-03/06, 2003, pp. 174–183.
J.O. Smith and J.S. Abel, “Closed-form least-squares source location estimation from range-difference measurements,” IEEE Transactions on Acoustics, Speech, and Signal Processing, vol. asp-35, no. 12, 1987.
R. Stoleru, T. He, J. A. Stankovic and D. Luebke, “A high-accuracy, low-cost localization system for wireless sensor networks,” Proc. the 3rd International Conference on Embedded Networked Sensor Systems, 2005.
J.B. Tenenbaum, V.d. Silva and J.C. Langford, “A Global Geometric Framework for Nonlinear Dimensionality Reduction,” Science, vol. 290, p. 2319, 2000.
Y. Xu and W.-C. Lee, “On localized prediction for power efficient object tracking in sensor networks,” Proc. 23 rd International Conference on Distributed Computing Systems Workshops, 2003.
N. Xu, S. Rangwala, K.K. Chintalapudi, D. Ganesan, A. Broad, R. Govindan and D. Estrin, “A wireless sensor network for structural monitoring,” Proc. of the 2nd International Conference on Embedded Networked Sensor Systems, 2004.
Y. Xu, W. J. and W.-C. Lee, “Prediction-based strategies for energy saving in object tracking sensor networks,” Proc. International Conference in Mobile Data Management, 2004.
Y. Xu, W. J. and W.-C. Lee, “Dual prediction-based reporting for object tracking sensor networks,” Proc. of the 1 st International Conference on Mobile and Ubiquitous Systems: Networking and Services, 2004.
H. Yang and B. Sikdar, “A protocol for tracking mobile targets using sensor networks,” Proc. of the 1 st IEEE International Workshop in Sensor Network Protocols and Applications, 2003.
W. Zhang and G. Cao, “DCTC: dynamic convoy tree-based collaboration for target tracking in sensor networks,” IEEE Transactions on Wireless Communications, vol. 3, no. 5, pp. 1689–1701, 2004.
Z. Zhong, Range-Free Localization and Tracking in Wireless Sensor Networks, Ph.D. Dissertation, University of Minnesota, 2010.
Z. Zhou, J.-H. Cui and S. Zhou, “Localization for Large-Scale Underwater Sensor Networks,” UCONN CSE Technical Report: UbiNet-TR06-04, 2006.
Author information
Authors and Affiliations
Corresponding author
Questions and Exercises
Questions and Exercises
-
1.
The Global Positioning System (GPS) is very widely used for the localization of objects in the earth’s frame of reference. Why is GPS not suited for localization in WSN settings?
-
2.
Time Difference of Arrival (TDoA) and Received Signal Strength Indicator (RSSI) are examples of ranging methods in range-based localization. Briefly describe the mechanisms behind the operation of these two techniques. Why does TDoA typically perform better that RSSI?
-
3.
What are the advantages and disadvantages of range-free localization relative to range-based localization?
-
4.
The DV-hop method is an example of a connectivity-based range-free localization method. Briefly describe how this method estimates the distance between an arbitrary node u k and an anchor node v i . Given distances of the arbitrary node from multiple anchors, describe how the node’s location is determined through this method. Why does the DV-hop method fail in networks having complex shapes?
-
5.
What benefits does the inclusion of mobile nodes bring to a WSN? Briefly describe possible different architectures of a WSN having some mobile nodes.
-
6.
Briefly describe the meaning of the term “Doppler effect”. How does this effect impact localization in mobile WSNs. How is the impact of this effect compensated for?
-
7.
Briefly describe the mechanism of operation of tree-based, cluster-based and prediction-based tracking in WSNs.
-
8.
During a WSN localization process, a target node is to be localized based on its angular displacement from two anchor nodes. Assuming the two anchors #1 and #2 are, respectively, located at the coordinates (2,3) and (10,0), and that the angular displacements α and β of the target node relative to the anchors #1 and #2 are, respectively, 45° and 60°, compute the location of the target node relative to the two anchors in Fig. 6.7.
Fig. 6.7 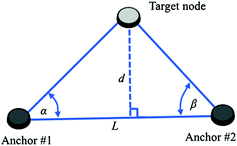
Reference figure for Question 8
-
9.
In this problem you will use MATLAB to simulate the APIT localization algorithm. Assume that the WSN occupies a 20 × 20 region which is divided into 400 cells that are each 1 × 1 units in dimension. Let the bottom left corner of the region have the coordinates (0,0) and the top right corner have the coordinates (20,20). Assume that the anchors at (0,0), (5,2) and (3,8) are connected to form a triangular region, just like the anchors at (10,10), (10,20), (15,10) and the anchors at (20,0), (15,5) and (15,0). Randomly generate 100 coordinates within this 20 × 20 region (assume the coordinates are integer numbers, i.e., each of the x and y coordinates are integer values between 0 and 20 inclusive). These coordinates represent the locations of the normal WSN nodes. For any five of these nodes that lie inside the triangles, use the APIT approach to find their locations. Compare the locations found by the algorithm to the actual locations of these nodes (compute the error as the Euclidian distance between the true locations and the computed locations and find the mean error over the five nodes). Rerun the APIT process when the WSN is segmented into cells that are 2 × 2 units in dimension and when they are cells that are 4 × 4 units in dimension. Comment on how the localization error varies in relation to the cell size (be sure to use the same 5 nodes in all three cases).
-
10.
How many receiving localization nodes are enough for a successful implementation of a TDoA method?
-
11.
What is the optimal configuration of receivers in TDoA? Please explain why.
-
12.
Given four receivers in a plane that use RSSI method of localization, derive mathematically the optimal configuration of receivers. Simulate using MATLAB various scenarios and show that the solution found theoretically gives the best localization accuracy.
-
13.
Describe how (6.11) can be used for localization by combining two different methods. Which method can be combined here? What is the trade-off in combining two methods versus using only one of the localization methods?

Rights and permissions
Copyright information
© 2016 Springer International Publishing AG
About this chapter
Cite this chapter
Selmic, R.R., Phoha, V.V., Serwadda, A. (2016). Localization and Tracking in WSNs. In: Wireless Sensor Networks. Springer, Cham. https://doi.org/10.1007/978-3-319-46769-6_6
Download citation
DOI: https://doi.org/10.1007/978-3-319-46769-6_6
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-46767-2
Online ISBN: 978-3-319-46769-6
eBook Packages: Computer ScienceComputer Science (R0)