
Abstract
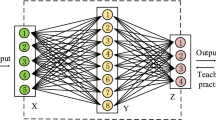
This article focuses on the development of an autonomous navigation system by generating real-time 3D maps of different urban environments with different properties within simulation software. This system used the Pioneer 3-DX vehicle, a LiDAR sensor, GPS, and a gyroscope. For the elaboration of the trajectory, the mathematical tool of artificial potential fields was used, which will generate an attractive field to a dynamic goal identified by the robot and repulsive to the obstacles present in the environment, recognized with great precision thanks to the use of a neural network. The topology neural network 8–16–32 was developed using forward propagation, reverse propagation, and gradient descent algorithms. By combining the tools of potential fields and neural networks, a path was traced through which the robotic system will be able to move freely under an off-center point kinematic control algorithm. Finally, a 3D map of the environment was obtained to provide information on the morphology and most outstanding characteristics of the deployment environment to users who use the system.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Rotrix África industries CC. Irrigation Systems. https://www.rotrixafrica.co.za/irrigation-systems/. Accessed 21 Oct 2021
Mori, B.: Diseño de un vehículo aéreo-terrestre no tripulado con autonomía de funcionamiento de larga duración orientado a operaciones de búsqueda y rescate [publication in Spanish]. Bachelor’s thesis. Pontificia Universidad Católica del Perú, Lima, Perú (2020)
Peskoe-Yang, L.: Paris Fighters used this remote-controlled robot to extinguish the Notre Dame blaze (2019). https://spectrum.ieee.org/automaton/robotics/industrial-robots/colossus-the-firefighting-robot-that-helped-save-notre-dame. Accessed 21 Oct 2021
Montiel, O., Orozco-Rosas, U., Sepulveda, R.: Path planning for mobile robots using Bacterial Potential Field for avoiding static and dynamic obstacles. Expert Syst. Appl. 42, 5177–5191 (2015). https://doi.org/10.1016/j.eswa.2015.02.033
Guerra, M., Efimov, D., Zheng, G., Perruquetti, W.: Avoiding local minima in the potential field method using input-to-state stability. Control. Eng. Pract. 55, 174–184 (2016). https://doi.org/10.1016/j.conengprac.2016.07.008
Mújica, D., Luna, A., de Jesús, J., Carvajal, B.: Noise gradient strategy for an enhanced hybrid convolutional-recurrent deep network to control a self-driving vehicle. Appl. Soft Comput. 92, 106258 (2020). https://doi.org/10.1016/j.asoc.2020.106258
Du, S., Guo, H., Simpson, A.: Self-driving car steering angle prediction based on image recognition. arXiv preprint (2019). https://arxiv.org/pdf/1912.05440. Accessed 21 Oct 2021
Alvarez, I.: Pérdidas de inserción para diferentes materiales y árboles. Bachellor’s tesis [publication in Spanish]. Universidad Autónoma de Madrid, Madrid, Spain (2013)
Do, T.D., Duong, M.T., Dang, Q.V., Le, M.H.: Real-time self-driving car navigation using deep neural network. In: 2018 4th International Conference on Green Technology and Sustainable Development (GTSD). IEEE, Ho Chi Minh, Vietnam, pp. 7–12 (2018)https://doi.org/10.1109/GTSD.2018.8595590
Kumar, G.A., Lee, J.H., Hwang, J., Park, J., Youn, S.H., Kwon, S.: LiDAR and camera fusion approach for object distance estimation in self-driving vehicles. Symmetry 12(2), 324 (2020). https://doi.org/10.3390/sym12020324
Khatib, O.: Real-time obstacle avoidance for manipulators and mobile robots. In: Proceedings 1985 IEEE International Conference on Robotics and Automation. IEEE, United States, pp. 500–505 (1985) https://doi.org/10.1109/ROBOT.1985.1087247
Ruiz, J.: Estudio para el desarrollo de un prototipo de mapeo 3D en espacios peligrosos [publication in Spanish]. Bachellor’s tesis, Unidades tecnológicas de Santander, Santander, Colombia (2020). http://repositorio.uts.edu.co:8080/xmlui/handle/123456789/3582. Accessed 21 Oct 2021
López, R., Fernandez, J., Fernández, J.: Las redes neuronales artificiales [publication in Spanish]. (1st ed.). Netbiblo, La Coruna, Spain (2008)
Zou, F., Shen, L., Jie, Z., Zhang, W., Liu, W.: A sufficient condition for convergences of adam and rmsprop. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 11127–11135 (2019). https://arxiv.org/pdf/1811.09358v3.pdf. Accessed 21 Oct 2021
Calandín, L.: Modelado cinemático y control de robots móviles con ruedas. Doctoral dissertation [publication in Spanish], Universidad Politécnica de Valencia, Valencia, Spain (2006). https://riunet.upv.es/bitstream/handle/10251/1840/tesisUPV2519.pd. Accessed 21 Oct 2021
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Chávez, L., Cortez, A., Vinces, L. (2022). A Strategy of Potential Fields and Neural Networks in the Control of an Autonomous Vehicle Within Dangerous Environments. In: Iano, Y., Saotome, O., Kemper Vásquez, G.L., Cotrim Pezzuto, C., Arthur, R., Gomes de Oliveira, G. (eds) Proceedings of the 7th Brazilian Technology Symposium (BTSym’21). BTSym 2021. Smart Innovation, Systems and Technologies, vol 295. Springer, Cham. https://doi.org/10.1007/978-3-031-08545-1_43
Download citation
DOI: https://doi.org/10.1007/978-3-031-08545-1_43
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-08544-4
Online ISBN: 978-3-031-08545-1
eBook Packages: EngineeringEngineering (R0)