
Abstract
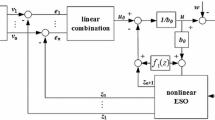
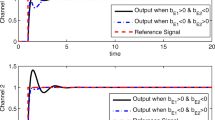
The capability of ADRC is studied for linear time-invariant SISO minimum-phase systems with unknown orders, uncertain relative degrees, and unknown input disturbances. It is proved that ADRC can reject the unknown input disturbance and guarantee the close-loop stability for the plants with unknown but bounded relative degrees. Meanwhile, some close-loop performances can be achieved. The influence of the sensor noise is also discussed. And it is demonstrated by numerical examples that one ADRC with fixed parameters can be applied to a group of plants of different orders, relative degrees, and parameters.
Similar content being viewed by others

References
M. Krstic, I. Kanellakopoulos, and P. V. Kokotovic, Nonlinear and Adaptive Control Design, John Wiley & Sons Inc., New York, 1995.
H. Chen and L. Guo, Identification and Stochastic Adaptive Control, Birkhauser, Boston, 1991.
T. Doyle, B. Francis, and A. Tannenbaum, Feedback Control Theory, 3rd ed., Macmillan, New York, 1992.
C. Johnson, Accommodation of external disturbances in linear regulator servomechanism problems, IEEE Transactions on Automatic Control, 1971, 16(6): 635–644.
C. Johnson, Disturbance-accommodating control: An overview, Proceeding of 1986 American Control Conference, 1986.
G. Hostetter and J. Meditch, On the generalization of observers to systems with unmeasurable, unknown inputs, Automatica, 1973, 9(6): 721–724.
J. Profeta, W. Vogt, and M. Mickle, Disturbance estimation and compensation in linear systems, IEEE Transactions on Aerospace and Electronic Systems, 1990, 26(2): 225–231.
T. Umeno and Y. Hori, Robust speed control of DC servomotors using modern two degrees-of-freedom controller design, IEEE Transactions on Industrial Electronics, 1991, 38(5): 363–368.
K. Ohishi, M. Nakao, and K. Miyachi, Microprocessor-controlled DC motor for load-insensitive position servo system, IEEE Transactions on Industrial Electronics, 1987, 34(1): 44–49.
E. Schrijver and J. Dijk, Disturbance observers for rigid mechanical systems: Equivalence, stability, and design, Journal of Dynamic Systems, Measurement, and Control, 2002, 124(4): 539–548.
S. Kwon and W. Chung, A discrete-time design and analysis of perturbation observer for motion control applications, IEEE Transactions on Control Systems Technology, 2003, 11(3): 399C407.
T. Hsia and L. Gao, Robot manipulator control using decentralized linear time-invariant timedelayed controller, Proceedings of the 1990 IEEE International Conference on Robotics and Automation, 1990, 3: 2070–2075.
L. Guo and W. Chen, Disturbance attenuation and rejection for systems with nonlinearity via dobc approach, International Journal of Robust Nonlinear Control, 2005, 15(3): 109–125.
J. Han, A class of extended state observers for uncertain systems, Control and Decision, 1995, 10(1): 85–88 (in Chinese).
J. Han, Auto-disturbance rejection control and its applications, Control and Decision, 1998, 13(1): 19–23 (in Chinese).
Y. Huang and J. Han, Analysis and design for nonlinear continuous extended state observer, Chinese Bulletin, 2000, 45(21): 1938–1944.
J. Han, From PID to active disturbance rejection control, IEEE Transactions on Industrial Electronics, 2009, 56(3): 900–906.
Y. Huang, K. Xu, J. Han, and J. Lam, Flight control design using extended state observer and non-smooth feedback, Proceedings of the 2001 IEEE Conference on Decision and Control, Orlando, Florida, USA, December 2001.
L. Sun, D. Li, and X. Jiang, Automatic disturbance rejection control for power plant ball mill, Journal of Tsinghua University (Science and Technology), 2003, 43(6): 779–781 (in Chinese).
D. Wu and K. Chen, Design and analysis of precision active disturbance rejection control for noncircular turning process, IEEE Transactions on Industrial Electronics, 2009, 56(7): 2746–2753.
S. Li and Z. Liu, Adaptive speed control for permanent-magnet synchronous motor system with variations of load inertia, IEEE Transactions on Industrial Electronics, 2009, 56(8): 3050–3059.
S. Li, X. Yang, and D. Yang, Active disturbance rejection control for high pointing accuracy and rotation speed, Automatica, 2009, 45(8): 1854–1860.
Q. Zheng and Z. Gao, On practical applications of active disturbance rejection control, Proceedings of the 2010 Chinese Control Conference, Beijing, China, July 2010.
H. Huang, L. Nie, G. Pan, and M. Xia, Application of active disturbance rejection control technology in distributed control system of coal-fired power generation, Proceedings of the 2010 Chinese Control Conference, 2010.
S. E. Talole, J. P. Kolhe, and S. B. Phadke, Extended-state-observer-based control of flexible-joint system with experimental validation, IEEE Transactions on Industrial Electronics, 2010, 57(4): 1411–1419.
C. Zhao and Y. Huang, ADRC based integrated guidance and control scheme for the interception of maneuvering targets with desired los angle, Proceedings of the 2010 Chinese Control Conference, Beijing, China, July 2010.
S. Nazrulla and H. K. Khalil, Robust stabilization of non-minimum phase nonlinear systems using extended high gain observers, Proceeding of 2008 American Control Conference, 2008.
L. B. Freidovich and H. K. Khalil, Performance recovery of feedback-linearization based designs, IEEE Transactions on Automatic Control, 2008, 53(10): 2324–2334.
L. Praly and Z. Jiang, Further results on robust semiglobal stabilization with dynamic input uncertainties, Proceeding of 1998 IEEE Conference on Decision and Control, 1998, 1: 891–896.
H. S. Lee and M. Tomizuka, Robust motion controller design for highaccuracy positioning systems, IEEE Transactions on Industrial Electronics, 1996, 43(1): 48–55.
C. J. Kempf and S. Kobayashi, Disturbance observer and feedforward design for a high-speed direct-drive positioning table, IEEE Transactions on Control Systems Technology, 1999, 7(5): 513–526.
W. H. Chen, D. J. Ballance, P. J. Gawthrop, and J. OReilly, A nonlinear disturbance observer for robotic manipulators, IEEE Transactions on Industrial Electronics, 2000, 47(4): 932–938.
M. T. White, M. Tomizuka, and C. Smith, Improved track following in magnetic disk drives using a disturbance observer, IEEE/ASME Transactions on Mechatronics, 2000, 5(1): 3–11.
K. Yang, Y. Choi, and W. K. Chung, On the tracking performance improvement of optical disk drive servo systems using error-based disturbance observer, IEEE Transactions on Industrial Electronics, 2005, 52(1): 270–279.
A. Radke and Z. Gao, A survey of state and disturbance observers for practitioners, Proceedings of the 2006 American Control Conference, Minneapolis, Minnesota, USA, June 2006.
H. Shim and Y. J. Joo, State space analysis of disturbance observer and a robust stability condition, Proceedings of the 2007 conference on decision and control, 2007.
J. Back and H. Shim, Adding robustness to nominal output feedback controllers for uncertain nonlinear systems: A nonlinear version of disturbance observer, Automatica, 2008, 44(10): 2528–2537.
H. Shima and N. H. Jo, An almost necessary and sufficient condition for robust stability of closedloop systems with disturbance observer, Automatica, 2009, 45: 296–299.
C. Zhao, Capability of ADRC for minimum-phase plants with unknown orders and uncertain relative degrees, Proceedings of the 2010 Chinese Control Conference, Beijing, China, July 2010.
J. Han, Active Disturbance Rejection Control Technique, National Defense Industry Press, Beijing, 2008 (in Chinese).
Z. Gao, Y. Huang, and J. Han, An alternative paradigm for control system design, Proceedings of the 2001 IEEE Conference on Decision and Control, Orlando, Florida, USA, 2001, 5: 4578–4585.
Y. Huang and W. Zhang, Development of active disturbance rejection controller, Control Theory and Applications, 2002, 19(4): 485–492 (in Chinese).
C. Zhao and Y. Huang, ADRC based integrated guidance and control scheme, Journal of Systems Science and Mathematical Sciences, 2010, 30(6): 742–751 (in Chinese).
C. Zhao, Capability of ADRC for plants with unknown orders and/or uncertain relative degrees: theory and applications, Ph.D. dissertation, Institute of Systems Science, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, 2011 (in Chinese).
C. Zhao and Y. Huang, Design ADRC for two special kinds of systems, Proceedings of the 2011 Chinese Control Conference, Yantai, China, July 2011.
Author information
Authors and Affiliations
Corresponding author
Additional information
This research was supported by Natural Science Foundation of China under Grant Nos. 60821091 and 60736022.
This paper was recommended for publication by Editor Yiguang HONG.
Rights and permissions
About this article
Cite this article
Zhao, C., Huang, Y. ADRC based input disturbance rejection for minimum-phase plants with unknown orders and/or uncertain relative degrees. J Syst Sci Complex 25, 625–640 (2012). https://doi.org/10.1007/s11424-012-1022-4
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11424-012-1022-4