
Abstract
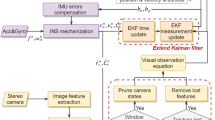
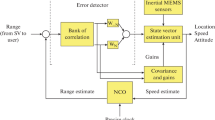
In urban canyons, buildings and other structures often block the line of sight of visible Global Navigation Satellite System (GNSS) satellites, which makes it difficult to obtain four or more satellites to provide a three-dimensional navigation solution. Previous studies on this operational environment have been conducted based on the assumption that GNSS is not available. However, a limited number of satellites can be used with other sensor measurements, although the number is insufficient to derive a navigation solution. The limited number of GNSS measurements can be integrated with vision-based navigation to correct navigation errors. We propose an integrated navigation system that improves the performance of vision-based navigation by integrating the limited GNSS measurements. An integrated model was designed to apply the GNSS range and range rate to vision-based navigation. The possibility of improved navigation performance was evaluated during an observability analysis based on available satellites. According to the observability analysis, each additional satellite decreased the number of unobservable states by one, while vision-based navigation always has three unobservable states. A computer simulation was conducted to verify the improvement in the navigation performance by analyzing the estimated position, which depended on the number of available satellites; additionally, an experimental test was conducted. The results showed that limited GNSS measurements can improve the positioning performance. Thus, our proposed method is expected to improve the positioning performance in urban canyons.













Similar content being viewed by others
References
Bailey T (2003) Constrained Initialization for bearing-only SLAM. In: Proceedings of IEEE international conference on robotics and automation, Taipei, Taiwan, Sept 2003
Bay H, Tuytelaars T, Gool LV (2006) SURF: speeded up robust features. In: Proceedings of the 9th European conference on computer vision, Graz, Austria, May 2006
Bryson M, Sukkarieh S (2008) Observability analysis and active control for airborne SLAM. IEEE Trans Aerosp Electron Syst 44(1):261–280
Bryson M, Kim J, Sukkarieh S (2005) Information and observability metrics of inertial SLAM for on-line path-planning on an aerial vehicle. In: IEEE international conference on robotics and automation, Spain, Apr 2005
Chun S, Won DH, Heo MB, Lee YJ (2012) Performance analysis of an INS/SLAM integrated system with respect to the geometrical arrangement of multiple vision sensors. Int J Control Autom Syst 10(2):288–297
Ding W, Wang J (2011) Precise velocity estimation with a stand-alone GPS receiver. J Navig 64(2):311–325
Durrant-Whyte H, Bailey T (2006a) Simultaneous localization and mapping tutorial I. IEEE Robot Autom Mag 13(2):99–108
Durrant-Whyte H, Bailey T (2006b) Simultaneous localization and mapping tutorial II. IEEE Robot Autom Mag 13(3):108–117
Fu S, Liu H, Gao L, Gai Y (2007) SLAM for mobile robots using laser range finder and monocular vision. In: IEEE int. conf. mechatronics and machine vision in practice, Xizmen University, Dec 2007
Goshen-Meskin D, Bar-Itzhack II (1992) Observability analysis of piece-wise constant systems—part I&II: theory. IEEE Trans Aerosp Electron Syst 28(4):1056–1075
Hofmann-Wellenhof LichtenggerH, Wasle E (2007) GNSS: GPS, GLONASS, Galileo & more. Springer, Wien New York
Kim J, Sukkarieh S (2007) Real-time implementation of airborne inertial-SLAM. Robot Auton Syst 55:62–71
Lee YC (2011) A position domain relative RAIM method. IEEE Trans Aerosp Electron Syst 47(1):85–97
Lee YW, Suh Y, Shibasaki R (2008) A GIS-based simulation to predict GPS availability along the Tehran road in Seoul, Korea. KSCE J Civil Eng 12(6):401–408
Lowe DG (1999) Object recognition from local scale invariant features. In: Proceedings of the 7th IEEE international conference on computer vision, Kerkyra, Sept 1999
Soloviev A (2008) Tight coupling of GPS, laser scanner, and inertial measurements for navigation in urban environments. In: Proceedings of IEEE/ION position location and navigation symposium, Monterey, CA, USA, May 2008
Soloviev A, Venable D (2010) Integration of GPS and vision measurements for navigation in GPS challenged environments. In: Proceedings of IEEE/ION position location and navigation symposium, Indian Wells, CA, USA, May 2010
Titterton DH, Weston JL (1997) Strapdown inertial navigation technology. Peter Peregrinus Ltd.
Tomasi C, Kanade T (1991) Detection and Tracking of Point Features. Carnegie Mellon University Technical Report Technical Report CMU-CS-91-132, Apr 1991
Won DH, Chun S, Sung S, Lee YJ, Cho J, Joo J, Park J (2010) INS/vSLAM system using distributed particle filter. Int J Control Autom Syst 8(6):1232–1240
Yoo K, Sung S, Lee E, Lee S, Kim S, Lee HJ, Lee YJ (2009) Availability assessment of GPS augmentation system using geostationary satellite and QZSS in Seoul Urban Area. Trans Jpn Soc Aeronaut Space Sci 52(177):152–158
Zhao Y (1997) Vehicle location and navigation systems. Artech House, USA
Acknowledgments
This research was supported by a grant from the Transportation System Innovation Program (TSIP), funded by the Ministry of Land, Transport and Maritime Affairs (MLTM) of the Korean government.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Won, D.H., Lee, E., Heo, M. et al. GNSS integration with vision-based navigation for low GNSS visibility conditions. GPS Solut 18, 177–187 (2014). https://doi.org/10.1007/s10291-013-0318-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10291-013-0318-8