
Abstract
A one-boundary diffusion model was applied to the data from two experiments in which subjects were performing a simple simulated driving task. In the first experiment, the same subjects were tested on two driving tasks using a PC-based driving simulator and the psychomotor vigilance test. The diffusion model fit the response time distributions for each task and individual subject well. Model parameters were found to correlate across tasks, which suggests that common component processes were being tapped in the three tasks. The model was also fit to a distracted driving experiment of Cooper and Strayer (Human Factors, 50, 893–902, 2008). Results showed that distraction altered performance by affecting the rate of evidence accumulation (drift rate) and/or increasing the boundary settings. This provides an interpretation of cognitive distraction whereby conversing on a cell phone diverts attention from the normal accumulation of information in the driving environment.
Similar content being viewed by others

Diffusion decision models have been successful in dealing with simple two-choice decision-making tasks (Ratcliff, 1978; Ratcliff & McKoon, 2008; Wagenmakers, 2009). There have been applications of these models in a variety of domains, such as psychology, neuroscience (Gold & Shadlen, 2001; Hanes & Schall, 1996; Philiastides, Ratcliff, & Sajda, 2006; Ratcliff, Cherian, & Segraves, 2003; Schall, Purcell, Heitz, Logan, & Palmeri, 2011; Smith & Ratcliff, 2004; Wong & Wang, 2006), neuroeconomics and decision making (Krajbich & Rangel, 2011; Roe, Busemeyer, & Townsend, 2001), and various clinical domains (White, Ratcliff, Vasey, & McKoon, 2010), and with a variety of subject populations, such as children (Ratcliff, Love, Thompson, & Opfer, 2012), older adults (Ratcliff, Thapar, & McKoon, 2010, 2011), aphasics (Ratcliff, Perea, Colangelo, & Buchanan, 2004), and children with ADHD (Mulder et al., 2010) and dyslexia (Zeguers et al., 2011). In these models, evidence toward one or the other of the alternatives is assumed to accumulate over time.
Recently, a diffusion model for one-choice tasks has been developed and fit both to data from the psychomotor vigilance test (PVT), a task used extensively in sleep deprivation research, and to data from a simple (one-choice) brightness detection task (Ratcliff & Van Dongen, 2011). In the PVT, a millisecond timer is displayed on a computer screen, and it starts counting up after delays between 2 and 12 s after the subject’s last response. The subject’s task is to hit a key as quickly as possible to stop the timer. When the key is pressed, the counter is stopped, and the response time (RT, in milliseconds) is displayed for 1 s.
Ratcliff and Van Dongen (2011) presented fits of the model to data from the PVT. In one analysis, they fit RT distributions (including hazard functions) from experiments with over 2,000 observations per RT distribution per subject. They also fit data in which the PVT was tested every 2 h for 36 h of sleep deprivation. They found that drift rate was closely related to an independent measure of alertness, and this provided an external validation of the model.
The aim of this article is to examine whether the single-choice diffusion model can be used to fit driving RT data. In one version, subjects are seated in front of a PC monitor with a gaming steering wheel and foot pedals (accelerator and brake), and they follow approximately 100 feet behind a lead vehicle at about 65 m.p.h. There are two tasks. One is to brake when the lead vehicle brakes, which is signaled by the lead vehicle slowing and the brake lights turning on. The second is to drive around the lead vehicle into an unoccupied lane when the lead vehicle brakes.
Data from these two driving tasks and the PVT were used to test the one-choice model. The same subjects were tested on the three tasks, and this allowed us to examine individual differences across the tasks to provide further validation for the models (model parameters should correlate across similar tasks). It also allowed us to determine which model components were responsible for different RT performance levels. The one-choice model was also applied to the data from a distracted driving experiment of Cooper and Strayer (2008). This experiment used a high-fidelity driving simulator with the braking task described above. This allowed us to determine which model components were affected by distracted driving.
Modeling driver distraction
There are many sources of driver distraction, including talking to passengers, eating, drinking, lighting a cigarette, shaving, applying make-up, and listening to the radio (Stutts et al., 2003). However, the last decade has seen an explosion of nomadic devices that have made their way into the automobile, enabling a host of new sources of driver distraction (e.g., sending and receiving e-mail or text messages, communicating via cellular devices, using the Internet, etc.). In many cases, these new sources of distraction have the potential to be more impairing because they are more cognitively engaging and because they are often performed over more sustained periods of time. What compounds the risk to public safety is that at any daylight hour, it is estimated that over 10 % of drivers on U.S. roadways are talking on their cellphone (Glassbrenner, 2005).
Cellphones are thought to induce a form of inattention blindness whereby attention is diverted from the processing of information necessary to safely operate a motor vehicle (Strayer & Drews, 2007; Strayer, Drews, & Johnston, 2003; Strayer & Johnston, 2001). In a series of studies, these authors examined how cellphone conversations affected the driver’s recognition memory for objects that were encountered while driving. Even when a driver’s eyes were directed at objects in the driving environment, they were half as likely to subsequently recognize the objects if they were conversing on a cellphone. In addition, the real-time brain activity associated with reacting to brake lights in a lead vehicle was suppressed when drivers were talking on a cellphone. Thus, cellphone drivers fail to see information in the driving scene because they do not encode it as well as they do when they are not distracted. In situations where the driver is required to react with alacrity, drivers using a cellphone are less able to do so.
Prior research has demonstrated that conversing on a cellphone increases brake RT (Alm & Nilsson, 1995; Briem & Hedman, 1995; Brookhuis, De Vries, & De Waard, 1991; Lamble, Kauranen, Laakso, & Summala, 1999; Lee, McGehee, Brown, & Reyes, 2002; Levy, Pashler, & Boer, 2006; McKnight & McKnight, 1993; Radeborg, Briem, & Hedman, 1999; Strayer et al., 2003; Strayer & Johnston, 2001). Importantly, Brown, Lee, and McGehee (2001) found that increases in brake RT, such as those produced by cellphone conversations, increase both the likelihood and severity of motor vehicle collisions. The data from the studies reported above are consistent with an interpretation that the delayed brake reactions are due to a decrease in the rate of evidence accumulation. However, other parameters of driving performance suggest that drivers may adopt a more cautious/conservative driving style when they converse on a cellphone. For example, the above-referenced studies also found that drivers tend to increase their following distance when they are talking on a cellphone. This brake-RT–following distance trade-off complicates any simple interpretation of changes in RT when drivers converse on a cellphone. Formal modeling of the RT data may help explain why braking reactions are slowed when drivers talk on a cell phone.
One-choice diffusion model
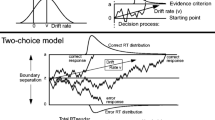
In single-choice decision-making tasks, the data are a distribution of RTs for hitting the response key. The one-choice diffusion model (Ratcliff & Van Dongen, 2011) assumes that the evidence begins accumulating on presentation of a stimulus until a decision criterion is hit, upon which a response is initiated (Fig. 1 illustrates the model). In the model, drift rate is assumed to vary from trial to trial (drift rate is normally distributed with mean v and SD η). This relates it to the standard two-choice model, which makes this assumption to fit the relative speeds of correct and error responses. In application of the one-choice model to sleep deprivation data, across-trial variability in drift rate was needed to produce the long tails observed in the RT distributions.

An illustration of the one-choice diffusion model. Evidence is accumulated at a drift rate v with SD across trials η, until a decision criterion at a is reached after time T d . Additional processing times include stimulus encoding time T a and response output time T b ; these sum to nondecision time T er . Nondecision time is assumed to be uniformly distributed, with mean T er and range s t
The hazard function provides a way of describing the RT distribution and, especially, the behavior of the right tail. The hazard function is defined as h(t) = f(t)/[1 − F(t)], where f(t) is the probability density function and F(t) is the cumulative density function. It represents the likelihood that the process will terminate in the next unit of time, given that it has not terminated to that point. Burbeck and Luce (1982) showed that a standard diffusion model (the inverse Gaussian or Wald distribution) produced hazard functions that increase and then level off in the right tail or decrease a little to a high constant asymptote. In the few cases in which hazard functions in two-choice data have been examined, the distributions are consistent with the diffusion model predictions (Ratcliff, Van Zandt, & McKoon, 1999). But in simple RT under sleep deprivation, the hazard functions fall to a low asymptote (see also Green & Smith, 1982). Ratcliff and Van Dongen (2011) introduced variability in drift rate across trials in the one-choice model by analogy with the two-choice diffusion model. Adding across-trial variability in drift rate produces hazard functions that can increase to asymptote, hazard functions that increase and then fall to a low asymptote, or patterns in between. The effect of sleep deprivation on the PVT was mainly to reduce drift rates, which resulted in hazard functions with lower asymptotes than in conditions with no sleep deprivation.
There are five parameters of the decision process that are estimated in fitting the model to data: the drift rate, or strength, of the stimulus; SD in drift rate across trials; mean nondecision time; the range across trials in a uniform distribution of nondecision time; and the distance to the decision boundary. However, there is an issue of identifiability in model parameters in this one-choice model (Ratcliff & Van Dongen, 2011). Only two parameters out of drift rate, across-trial SD in drift rate, or boundary setting can be uniquely determined. So absolute sizes of some of the parameters are not unique, but ratios are. Compounding this issue is that, in the experiments presented in this article, we have relatively low numbers of observations per experiment. This means that the model parameters are not estimated particularly accurately (across-trial variability in drift rate is less accurately estimated than the other model parameters). This issue is taken up in Monte Carlo simulations presented in Experiment 1.
The one-choice model is related to the earlier model of Smith (1995). Smith’s model assumed sustained and transient channel inputs that were time varying and either a single decision process that pooled evidence from the two inputs or two racing diffusion processes. These decision processes were Ornstein-Uhlenbeck diffusion processes. Although there are more parameters than for the one-choice model used here, Smith’s model was applied to parametric manipulations that constrained the model, and the parallel channels model was favored over the pooling model.
In this article, we present data from two experiments. One had subjects perform three tasks, two simple driving tasks using a PC based driving simulator and the PVT task. The second experiment fit data from a study by Cooper and Strayer (2008) on distracted driving. The aim of the first experiment was to determine whether the single-choice diffusion model fit the data and to examine individual differences in model parameters across the two driving tasks and the PVT. The aim of the modeling of the second experiment was to determine the locus of distracted driving within this modeling framework.
Experiment 1
The experiment of Cooper and Strayer (2008) had subjects perform a simulated driving task in a high-quality driving simulator. In the task, they were to drive behind a car, and when brake lights on it were turned on and it slowed, the subjects were to slow. We implemented this task as the first of our two driving tasks, but in our version, subjects were driving at full speed, not varying their speed. We noticed that in this task, there were sometimes long delays before the next trial began, because subjects had to slow down and then catch up to the car in front to begin the next trial. To collect more data per unit time, we implemented a second task in which the subjects were driving behind a car in the right lane of a two lane highway and, when the brake light turned on, they had to drive around the car in front. When they rounded the car in front, there was another car directly in front again, and when they approached it, the next trial began. The third task was the PVT. If this modeling approach was to be of practical use, no more than 1 h of testing in an experiment could be reasonably conducted, and our choice was to test more subjects on fewer sessions, as opposed to fewer subjects on more sessions. By testing the same subjects on three tasks, we could examine individual differences across tasks, using correlations in model parameters across tasks. This allowed us to see whether the individual differences were consistent across tasks and also provided verification that the model was extracting meaningful measures of individual performance.
Method
Apparatus
For the two driving tasks, we used a PC screen to display the driving simulation, and a standard driving game steering wheel and footpedals were used to control driving (Logitech Driving Force GT Wheel with Force Feedback). The software used was the STISIM Drive software, and events were sampled at a 16-ms rate.
Figure 2 shows screenshots of the PC screen for the two driving tasks as viewed by the subject. In the top panel, a lead car has its brakelights off, and the bottom panel has it a little closer to the driver, with its brakelights on.

Screen shots of driving views in the two driving tasks from Experiment 1. The top panel shows the lead car without the brake lights on, and the bottom panel shows the lead car with brake lights on with the driver closing on the lead car
PVT task
A box with edges composed of nine dashes and three vertical lines ("|") was on the screen at all times. After a response was made, there was a 2- to 12-s delay, and then a counter started counting milliseconds on the screen, with numbers appearing in the middle of the box. Because the sampling rate was 16 ms, the counter was not exact, but it presented a different number each display frame (the number was read from the internal millisecond timer). As soon as the counter started counting, the subject was to hit a button to stop it.
Braking task
In this task, the subject pressed the accelerator to the floor until the car was traveling at maximum speed, the lead car slowed down from some distance ahead, and then it matched the driver’s speed at a certain distance (about 100 feet). After a variable amount of time (between 2 and 10 s in 2-s steps), the lead car braked, and the driver removed the foot from the accelerator and pressed the brake to avoid a rear-end collision. After about 2 s of braking, the lead car zoomed away, the subject pressed the accelerator to the floor again, and a new lead car decelerated into position and matched the speed, ready for the next trial.
Driving-around task
The driver floored the accelerator and stayed in the right-hand lane of the two-lane highway. As the driver approached the lead car, the lead car matched the driver’s speed. Then, after a variable time (between 2 and 10 s in 2-s steps), the lead car braked, and the driver steered into the left-hand lane and allowed the lead car to slow down and fall behind. Once that car had receded to the rear, the driver steered back into the right-hand lane and approached the next lead car.
To measure the time at which the driver starts to drive around the lead car, the sideways velocity is recorded, and linear interpolation is used to estimate the time at which the car starts to move sideways. The sideways velocity starts to increase and then becomes approximately constant for a short while as the car drives to the left around the lead car. This relatively constant velocity provides a estimator of when the car begins to turn that is consistent across responses by the subject.
Subjects
Thirty-four undergraduates participated for two 1-h sessions for course credit. Two others were eliminated from the study because they did not have driving experience (or a valid license).
Procedure
Subjects took part in the three tasks in 2 1-h sessions. On day 1, they performed about 25 min of the PVT, followed by about 25 min of the braking task. On day 2, the subjects performed about 25 min of the braking task, followed by about 25 min of the driving-around task. This resulted in, on average, 22 min of the PVT, 52 min of the braking task, and about 29 min of the driving-around task. This resulted in the following mean number of observations per task: 206 in the PVT, 150 in the braking task, and 111 in the driving-around task.
Results
For the PVT, driving-around, and braking tasks, RTs less than 100, 300, and 350 ms, respectively, were eliminated from the analysis, and RTs greater than 560, 1,000, and 1,200 ms, respectively, were eliminated. For the PVT, fewer than 3 % of the responses were eliminated, with almost none shorter than 100 ms. For the driving-around task, 2.2 % of the fast responses were eliminated (the mean of these was 167 ms, which suggests that they were anticipations), and 2.3 % of the long responses were eliminated. For the braking task, fewer than 1 % of the fast responses and 3 % of the long responses were eliminated. The mean RTs for the three tasks were 321 ms for the PVT, 563 ms for the driving-around task, and 789 ms for the braking task (see Table 1). The PVT produced much shorter RTs than the other two tasks, and the braking task had longer RTs than the driving-around task. The driving-around task required the steering wheel to be turned, whereas in the braking task, the foot was required to be moved from the accelerator to the brake and responses were timed from when the brake pedal was pushed.
After an initial set of analyses, we found erratic behavior of correlations in model components across tasks. Mean RT correlated quite highly (around .6), but model parameters correlated around .3, but with some near zero. However, because the model divided RTs into two components, the decision process and nondecision time, both of which were noisy estimates, and because the number of observations was relatively small, we expected attenuation in the correlations in model parameters, relative to those for mean RT.
We found that refitting the data starting with the .1 quantile instead of the .05 quantile produced much better patterns of correlations among model parameters (in the .4–.5 range). This means that in the first set of model fits, the model parameters were being determined by the behavior of the .05 quantile RT, which can possibly be partly determined by fast outliers. In the refits using the .1 quantile as the first quantile, the proportion of responses between the 0 and .05 and between the .05 and .1 quantiles were grouped so no data were ignored.
The one-choice diffusion model was fit to the RT distributions for the three tasks. In general, the model produces fits to the data that closely match the data. The mean chi-square values shown in Table 1 are a little higher than the median values of chi square with 14 degrees of freedom. Out of the fits for the 34 subjects, two values showed a significant misfit (greater than 23.7) for the PVT, three were significant for the driving-around task, and one was significant for the braking task. Cumulative distributions for the model fits and data for the individual subjects are shown in Figs. 3, 4, and 5. These show the good correspondence between theory and data, as shown numerically by the chi-square values.

Cumulative response time distributions for the 34 subjects in the psychomotor vigilance test (PVT) task. The xs are the data, and the solid line is the model prediction

Cumulative response time distributions for the 34 subjects in the driving around task. The xs are the data, and the solid line is the model prediction. The order of subjects is the same as in Fig. 3

Model parameters are also shown in Table 1. Nondecision times change in a similar way to the mean RT across tasks. Drift rates are different in the three tasks, but drift rates divided by boundary sizes are relatively close together (between 8.3 and 10).
One of the ways of validating the model is to examine individual differences in model parameters. The diffusion model essentially divides the mean RT into a nondecision time and a decision time that is a distance (boundary setting) divided by speed (drift rate). This division is constrained by the requirement that the model fits the RT distributions. We can compute the correlations in mean RT across subjects for each pair of tasks and then the correlations in model parameters. The bottom left panels of Fig. 6 show plots of mean RT for the pairs of the three tasks for individual subjects, and the top right panels show the corresponding correlations. The diagonal panels show the histograms of mean RT across subjects. Figure 7 shows similar plots of the nondecision time and drift rate parameters for individual subjects for the three pairs of the three tasks. The mean correlation for the three tasks for mean RT is .64, the mean correlation for nondecision time is .42, and the mean correlation for drift rate is .44. These results show healthy individual differences that are captured in the model. The correlations in model parameters and mean RTs across subjects show that the three tasks seem to be tapping into the same processes.
Power calculations using monte carlo simulations
We performed a Monte Carlo simulation to see whether the observed correlations in model parameters (in the .4–.5 range) would be expected given the observed SDs in model parameters if the true correlation between the model parameters for the two tasks was high. There are two sources of variability in the model parameters: one that comes from the combinations of the fitting method and low numbers of observations, and the other from individual differences. We generated 50 sets of simulated data with 100 observations per data set and fit the model to these sets. These gave SDs in model parameters from this source of variability. Then we assumed a high correlation (.75) across subjects in model parameters and found SDs in model parameters across subjects to obtain observed correlations (.4–.45). For correlations of .75, for nondecision time, SDs across subjects were 30 and 65 ms for driving-around and braking tasks, and for drift rates, SDs across subjects were .4 and .5 for driving-around and braking tasks.
Also, we performed the correlation simulation 100 times; the means are .42 and .45, with SDs .14 and .14. These SDs illustrate the range of correlations that we might observe because of the relatively low power of the experiments. This suggests that the .2 correlation for nondecision time between the driving-around task and the PVT is something we might expect to occur by chance, with even a high correlation across subjects.
Our results show that our observed correlations were consistent with correlations across subjects in both drift rate and nondecision time of around .7–.8. Therefore, even for this few observations per subject, reliable individual differences are found across tasks both in mean RT and in diffusion model parameters.
Experiment 2
We present a model-based analysis of the experiment of Cooper and Strayer (2008). In this experiment, subjects took part in the braking task in a high-quality driving simulator, and the manipulation of interest was whether the subjects were distracted by talking on a cell phone or not.
Experiment 2 used the simple diffusion model to examine the impact of conversing on a hands-free cell phone on brake RT. Concurrent cell phone use has been shown to increase mean RT and following distance (Strayer, Drews, & Crouch, 2006; Strayer et al., 2003). Cell phone use has also been shown to decrease detection rates for targets and potential hazards on the roadway (Strayer & Drews, 2007; Strayer & Johnston, 2001). The increase in following distance observed among cell phone users would mean that they have longer to respond to a lead vehicle braking. Thus, the increase in brake RT among cell phone user could be the result of deliberate caution, as evidenced by their longer distance headway. The increase in RT could also be the result of impoverished sampling of the driving environment, and the decreased detection rate for targets and potential hazards is consistent with this interpretation. Fitting the brake RT data using the single diffusion model is important because it will help to examine the source of cognitive distraction from cell phone in terms of diffusion model parameters.
Method
Subjects
Nineteen undergraduates from the University of Utah participated in the research (see Cooper & Strayer, 2008, for additional details). All had normal or corrected-to-normal visual acuity and a valid driver’s license.
Stimuli and apparatus
A PatrolSim fixed-base driving simulator was used in the study. Two driving scenarios were developed using a freeway database; each differed in terms of direction of travel, location of braking events, and vehicle models. In each scenario, a pace car, programmed to travel in the right-hand lane, braked at random times 40 times throughout the scenario. Distractor vehicles were programmed to drive somewhat faster or slower than the pace car in the left lane, providing the impression of a steady flow of traffic. If the subjects failed to depress the brake, they would eventually collide with the pace car. Each scenario was approximately 18 min in duration.
Procedure
The experiment was conducted over 4 days. On the first day, subjects completed a questionnaire assessing their interest in potential topics of cell phone conversation. Subjects were then familiarized with the driving simulator, using a standardized 20-min adaptation sequence.
Sessions 1 and 4 included both single- and dual-task driving conditions, while sessions 2 and 3 consisted exclusively of dual-task driving. The dual-task condition involved naturalistic conversation on a hands-free cell phone with a confederate. The driver and confederate discussed topics that were identified in the preexperimental questionnaire as being of interest to the driver. Once initiated, conversation was allowed to progress and develop naturally. To avoid any possible interference from manual components of cell phone use, subjects used a hands-free cell phone that was positioned before driving began.
Results
We eliminated RTs less than 450 ms and greater than 4,000 ms. This resulted in 2.5 % of the data being eliminated, of which almost all (2.4 %) was from fast responses (anticipations), with a mean of 240 ms. The mean RT for driving normally was 1,060 ms, and for driving while using a cell phone, mean RT was 1,194 ms. Even though the difference between these two means does not seem too large, the main problem with distracted driving is not from responses in the center of the distribution or the fastest responses, but from the slowest responses in the tail of the distribution. The .1 quantile RTs (leading edge) were 725 and 766 ms for normal and distracted driving, and the .9 quantile RTs (the tail of the distribution) were 1,552 and 1,804 ms for nondistracted and distracted driving, respectively. Serious problems can occur when a slow decision coincides with a dangerous driving situation.
We fit the one-choice diffusion model to the data from the two conditions, normal and distracted driving. The model parameters are shown in Table 2. The mean number of observations per subject for the nondistracted condition was 107.1, and for distracted driving was 510.5. The number of degrees of freedom in the data was 19 (one bin before the .1 quantile and .05 bins between each of the others and above the .95 quantile). The number of parameters was four, and so the number of degrees of freedom was 14. The critical chi-square value was 23.7, and for both conditions, only 3 out of 38 were significant. This shows good correspondence between the model and data. The fits of the model to the cumulative RT distributions are shown in Fig. 8, and these show generally good visual correspondence between the theory and data.

Plots of mean RTs for each individual subjects, histograms, and correlations for the three tasks

Plots of model parameters, histograms of values, and correlations for the three tasks for each individual subject

Cumulative response time distributions for the 19 subjects in Experiment 2. The xs are the data, and the solid line is the model prediction. "S" refers to the subject number; "Non" refers to nondistracted driving, and "Dist" refers to distracted driving
The model parameters show that the effect of distraction is on both nondecision time and drift rate. About 30 ms of the difference is due to differences in nondecision RT (which is close to the 40-ms difference in the leading edge of the RT distributions), and the other 100 ms is due to a reduced drift rate. This model-based analysis suggests that the majority of slowing in the distracted driving condition occurs because of reduced uptake of evidence from the brake light stimulus in this task. Because the same subjects were tested in the two conditions, we can see whether model parameters correlate between the distracted and nondistracted conditions. The correlation for nondecision time was .65, and the correlation for drift rate was .56. The correlation in mean RT was .80. Thus, reliable individual differences are obtained both in the model parameters and in the data, just as in Experiment 1. However, because the model parameters are identifiable as ratios (i.e., a/v and v/η), boundary settings may also contribute to the effect. This is taken up in the General discussion section.
General discussion
The main result from this study is that the one-choice diffusion model for simple RT can be applied to these driving tasks. The three tasks studied were the PVT, to which the model has been successfully applied (Ratcliff & Van Dongen, 2011), the braking task that was used by Cooper and Strayer (2008), and a variant of that task in which the subject drives around the lead car when it brakes. Results show that the model successfully fit the data from the three tasks by fitting the RT distributions with chi-square values that were mostly nonsignificant. Furthermore, the model extracted significant individual differences in model parameters showing common processing in the three tasks.
The results also show that reliable individual differences can be obtained with tasks that can be completed in a little over half an hour with 100–150 trials per subject per session. However, the parameter estimates will be more reliable with more observations.
The one-choice diffusion model divides RT in a one-choice task into nondecision time and decision time (with both varying from trial to trial). The decision process is driven by a drift rate that represents the quality of evidence from the stimulus. This provides a somewhat different perspective on processing. If the RT measure alone is used, the focus is on the temporal aspects, but if drift rate is used, the focus is on the quality of information from the stimulus driving the decision process.
One way to view decision time is in terms of distance, velocity, and time. Decision time is obtained in an analogous way to determining time from distance (boundary setting) divided by velocity (drift rate), as in the relationship: velocity = distance/time. Velocity represents drift rate, which represents the quality of evidence used in making the decision. But the relationship is not a good approximation to the decision process, because of variability within a trial and across-trial variability in drift rate. The trade-off between model parameters discussed in the introduction says that it is possible to get the same decision time with different drift rates and boundary settings so long as the ratio is constant. However, because of variability in drift rate and the need to fit the whole distribution of RTs, it turns out that the trade-off also includes nondecision time. What this means is that absolute values of the model parameters are not unambiguously interpretable. But individual differences and differences among conditions are interpretable.
To go one step further, if all we have are ratios—namely, a/v and v/η—then it is possible that v (drift rate) is the same for normal and distracted driving but a (the boundary) differs. The one-boundary diffusion model shows that the v/η ratio is not altered by distraction and the a/v ratio is higher when the driver is distracted; however, without additional constraints, the one-boundary diffusion model, by itself, cannot differentiate between drift and boundary interpretations. Fortunately, this ambiguity in the interpretation of the parameters can be resolved by (1) using a two-choice diffusion model (e.g., Ratcliff & Tuerlinckx, 2002) and/or (2) using converging evidence from other methodologies.
Implications for cell phone use
Hands-free cell phone use has been characterized as a relatively "pure" form of cognitive distraction. That is, the driver’s eyes are on the road and the hands are on the wheel, so there is no direct contribution from visual or manual sources of interference. As compared with normal driving, brake RT was longer when subjects were talking on the cell phone. The lengthening of RT could be due to increased caution or to impaired sampling of the driving environment. The diffusion modeling indicates that the increased RT associated with concurrent cell phone use was due either to a reduction in the drift rate or to an increase in boundary setting (or a combination). This pattern indicates that the cell phone conversation impaired the accumulation of traffic-related information.
Application of the diffusion model provides important insight into why drivers using a cell phone are more likely to be involved in accidents. It is noteworthy that the biggest difference between normal and distracted driving was in the right tail of the distribution. That is, there was a 41-ms difference between conditions at the .1 quantile and a 252-ms difference between conditions at the .9 quantile, indicating that some braking events are more disrupted than others. Elsewhere, the increase in brake RT observed in Experiment 2 has been shown to increase both the likelihood and severity of accidents (Brown et al., 2001). The increased crash risk is most acute for the braking events associated with the right tail of the distribution. All other things being equal, these slow responses will have a greater delta-V at the point of rear-end collision (i.e., longer brake RTs increase the likelihood and severity of accidents). A more alarming version of this impairment occurs when drivers conversing on a cell phone miss important events in the driving environment, such as traffic lights or pedestrians. For example, Strayer and Drews (2007) found that recognition memory for objects that were looked at by the driver was impaired when they conversed on a cell phone. Moreover, event-related brain potentials time-locked to the onset of braking events are also suppressed by cell phone conversations. Here, we use diffusion modeling of the brake RT data to establish that the cell-phone-induced inattention blindness is due to retarded evidence accumulation, resulting in a delay in responding to the imperative events that are detected by the driver. Taken together, a clear pattern of cognitive distraction emerges whereby conversing on a cell phone diverts attention from the normal accumulation of information in the driving environment. Here, we used diffusion modeling of the brake RT data to establish that distraction alters the evidence accumulation process, resulting in a delay in responding to imperative events that are detected by the driver.
References
Alm, H., & Nilsson, L. (1995). The effects of a mobile telephone task on driver behaviour in a car following situation. Accident Analysis & Prevention, 27, 707–715.
Briem, V., & Hedman, L. R. (1995). Behavioural effects of mobile telephone use during simulated driving. Ergonomics, 38, 2536–2562.
Brookhuis, K. A., De Vries, G., & De Waard, D. (1991). The effects of mobile telephoning on driving performance. Accident Analysis & Prevention, 23, 309–316.
Brown, T. L., Lee, J. D., & McGehee, D. V. (2001). Human performance models and rear-end collision avoidance algorithms. Human Factors, 43, 462–482.
Burbeck, S.L., & Luce, R.D. (1982). Evidence from auditory simple reaction times for both change and level detectors. Perception and Psychophysics, 32, 117–133.
Cooper, J. M., & Strayer, D. L. (2008). Effects of simulator practiced and real-world experience on cell-phone related driver distraction. Human Factors, 50, 893–902.
Glassbrenner, D. (2005). Traffic safety facts research note: Driver cell phone use in 2005 - Overall results. DOT HS 809 967. Washington, DC: National Center for Statistics and Analysis, National Highway Traffic Safety Administration.
Gold, J. I., & Shadlen, M. N. (2001). Neural computations that underlie decisions about sensory stimuli. Trends in Cognitive Science, 5, 10–16.
Green, D. M., Smith, A. F. (1982). Detection of auditory signals occurring at random times: Intensity and duration. Perception and Psychophysics, 31, 117–127.
Hanes, D.P., and Schall, J.D. (1996). Neural control of voluntary movement initiation. Science, 274, 427–430.
Krajbich, I., & Rangel, A. (2011). A multi-alternative drift diffusion model predicts the relationship between visual fixations and choice in value-based decisions. Proceedings of the National Academy of Sciences, 108, 13852–13857.
Lamble, D., Kauranen, T., Laakso, M., & Summala, H. (1999). Cognitive load and detection thresholds in car following situations: Safety implications for using mobile (cellular) telephones while driving. Accident Analysis and Prevention, 31, 617–623.
Lee, J. D., McGehee, D. V., Brown, T. L. & Reyes, M. L. (2002). Collision warning timing, driver distraction, and driver response to imminent rear-end collisions in a high-fidelity driving simulator. Human Factors, 44, 314–334.
Levy, J., Pashler, H., & Boer, E. (2006). Central interference in driving: Is there any stopping the psychological refractory period? Psychological Science, 17, 228–235.
McKnight, A. & McKnight, A. (1993). The effect of cellular phone use upon driver attention. Accident Analysis & Prevention, 25, 259–265.
Mulder, M.J., Bos, D., Weusten, J.M.H., van Belle, J., van Dijk, S.C., Simen, P., van Engeland, H., & Durson, S. (2010). Basic impairments in regulating the speed-accuracy tradeoff predict symptoms of attention-deficit/hyperactivity disorder. Biological Psychiatry, 68, 1114–1119.
Philiastides, M. G., Ratcliff, R., & Sajda, P. (2006). Neural representation of task difficulty and decision-making during perceptual categorization: A timing diagram. Journal of Neuroscience, 26, 8965–8975.
Radeborg, K., Briem, V., & Hedman, L. R. (1999). The effect of concurrent task difficulty on working memory during simulated driving. Ergonomics, 42, 767–777.
Ratcliff, R. (1978). A theory of memory retrieval. Psychological Review, 85, 59–108.
Ratcliff, R., Cherian, A., & Segraves, M. (2003). A comparison of macaque behavior and superior colliculus neuronal activity to predictions from models of simple two-choice decisions. Journal of Neurophysiology, 90, 1392–1407.
Ratcliff, R., Love, J., Thompson, C. A., & Opfer, J. (2012). Children are not like older adults: A diffusion model analysis of developmental changes in speeded responses, Child Development, 83, 367–381.
Ratcliff, R., & McKoon, G. (2008). The diffusion decision model: Theory and data for two-choice decision tasks. Neural Computation, 20, 873–922.
Ratcliff, R., Perea, M., Colangelo, A., & Buchanan, L. (2004). A diffusion model account of normal and impaired readers. Brain & Cognition, 55, 374–382.
Ratcliff, R., Thapar, A., & McKoon, G. (2010). Individual differences, aging, and IQ in two-choice tasks. Cognitive Psychology, 60, 127–157.
Ratcliff, R., Thapar, A., & McKoon, G. (2011). Effects of aging and IQ on item and associative memory. Journal of Experimental Psychology: General, 140, 46–487.
Ratcliff, R., & Tuerlinckx, F. (2002). Estimating the parameters of the diffusion model: Approaches to dealing with contaminant reaction times and parameter variability. Psychonomic Bulletin and Review, 9, 438–481.
Ratcliff, R. & Van Dongen, H.P.A. (2011). A diffusion model for one-choice reaction time tasks and the cognitive effects of sleep deprivation. Proceedings of the National Academy of Sciences, 108, 11285–11290.
Ratcliff, R., Van Zandt, T., & McKoon, G. (1999). Connectionist and diffusion models of reaction time. Psychological Review, 106, 261–300.
Roe, R.M., Busemeyer, J.R., & Townsend, J.T. (2001). Multialternative decision field theory: A dynamic connectionist model of decision-making. Psychological Review, 108, 370–392.
Schall, J. D., Purcell, B. A., Heitz, R. P., Logan, G. D., & Palmeri, T. J. (2011). Neural mechanisms of saccade target selection: Gated accumulator model of the visual-motor cascade. European Journal of Neuroscience, 33, 1991–2002.
Smith, P.L. (1995). Psychophysically principled models of visual simple reaction time. Psychological Review, 102, 567–593.
Smith, P.L., & Ratcliff, R. (2004). The psychology and neurobiology of simple decisions. Trends in Neuroscience, 27, 161–168.
Strayer, D. L., & Drews, F. A. (2007). Cell-phone induced inattention blindness. Current Directions in Psychological Science, 16, 128–131.
Strayer, D. L., Drews, F. A., & Crouch, D. J. (2006). Comparing the cell-phone driver and the drunk driver. Human Factors, 48, 381–39.
Strayer, D. L., Drews, F. A., & Johnston, W. A. (2003). Cell phone induced failures of visual attention during simulated driving. Journal of Experimental Psychology: Applied, 9, 23–52.
Strayer, D. L., & Johnston, W. A. (2001). Driven to distraction: Dual-task studies of simulated driving and conversing on a cellular phone. Psychological Science, 12, 462–466.
Stutts, J., Feaganes, J., Rodman, E., Hamlet, C., Meadows, T., Rinfurt, D., Gish, K., Mercadante, M., & Staplin, L. (2003). Distractions in Everyday Driving. AAA Foundation for Traffic Safety (on-line publication).
Tuerlinckx, F., Maris, E., Ratcliff, R., De Boeck, P. (2001). A comparison of four methods for simulating the diffusion process. Behavior, Research, Instruments, and Computers, 33, 443–456.
Wagenmakers, E.-J. (2009). Methodological and empirical developments for the Ratcliff diffusion model of response times and accuracy. European Journal of Cognitive Psychology, 21, 641–671.
White, C. N., Ratcliff, R., Vasey, M. W., & McKoon, G. (2010). Using diffusion models to understand clinical disorders. Journal of Mathematical Psychology, 54, 39–52.
Wong K-F, & Wang X-J. (2006). A recurrent network mechanism for time integration in perceptual decisions. Journal of Neuroscience, 26, 1314–1328.
Zeguers, M.H.T., Snellings, P., Tijms, J., Weeda, W.D., Tamboer, P., Bexkens, A. & Huizenga, H.M. (2011). Specifying theories of developmental dyslexia: A diffusion model analysis of word recognition. Developmental Science, 14, 1340–1354.
Acknowledgments
This article was supported by AFOSR grant FA9550-11-1-0130 and NIA grant R01-AG041176.
Author information
Authors and Affiliations
Corresponding author
Appendix Fitting the model
Appendix Fitting the model
For the one-choice diffusion model, there is no explicit mathematical solution for an RT distribution with negative drift rate. Negative drift rates are produced from the left tail of the across-trial distribution of drift rates (e.g., the area below zero in the distribution of drift rates in Fig. 1). The model was therefore implemented as a simulation, using a random walk approximation to the diffusion process with 20,000 iterations per distribution at 0.5-ms step size (Tuerlinckx, Maris, Ratcliff, & De Boeck, 2001). To fit the model to data, the .05, .10, . . . , .95 quantiles of the RT distribution were generated from the data. These quantile RTs were used to find the proportion of responses in the RT distribution from the model lying between the data quantiles, and these were multiplied by the number of observations to give the expected values (E). The proportions of responses between the data quantiles were .05, and these were multiplied by the number of observations to give the observed values (O). In the simulations, if a process had not terminated by this time, it was stopped, and 3,500 ms was assigned as the RT (this happened rarely for these data sets). A chi-square statistic Σ(O − E)2/E was computed, and the parameters of the model were adjusted by a simplex minimization routine to minimize the chi-square value. A Markov chain Monte Carlo algorithm was used to obtain starting values for the simplex minimization routine to produce robustness to local minima. Then a simplex minimization method was used to produce the best-fitting model to the data. The simplex minimization routine was restarted 18 times with a wide simplex around the parameters estimated from the prior fit. Because of the issue of parameter identifiability, on each run of the fitting routine, boundary separation was fixed at a value we felt appropriate for the data set. In fitting the model, 2,000 simulated RTs were generated for each evaluation of the model, as in Ratcliff and Van Dongen (2011). The model was fit to the data for each individual subject, which allowed individual-difference analyses.
Rights and permissions
About this article
Cite this article
Ratcliff, R., Strayer, D. Modeling simple driving tasks with a one-boundary diffusion model. Psychon Bull Rev 21, 577–589 (2014). https://doi.org/10.3758/s13423-013-0541-x
Published:
Issue Date:
DOI: https://doi.org/10.3758/s13423-013-0541-x