
Abstract
This study examines bias (constant error) in spatial memory in an effort to determine whether this bias is defined by a dynamic egocentric reference frame that moves with the observer or by an environmentally fixed reference frame. Participants learned the locations of six target objects around them in a room, were blindfolded, and then rotated themselves to face particular response headings. From each response heading, participants used a pointer to indicate the remembered azimuthal locations of the objects. Analyses of the angular pointing errors showed a previously observed pattern of bias. More importantly, it appeared that this pattern of bias was defined relative to and moved with the observer—that is, was egocentric and dynamic. These results were interpreted in the framework of a modified category adjustment model as suggesting the existence of dynamic categorical (nonmetric) spatial codes.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Most work describing systematic distortions or bias in spatial memory has examined very large-scale spaces such as states and cities (Carbon & Leder, 2005; Stevens & Coupe, 1978) or small-scale, 2-D spaces such as desktops (Schmidt, 2004; Spencer & Hund, 2002) or computer screens (Fitting, Wedell, & Allen, 2007). In the present study, we examined sources of bias in memory for navigable room-sized environments. Previous work at this scale has been framed in terms of the category adjustment model (CAM), which was initially presented in the context of memory for the location of a 1.5-mm dot presented within a 15-cm circle on a piece of paper (Huttenlocher, Hedges, & Duncan, 1991). According to this account, stimuli are encoded into memory at two levels. Fine-grain information is unbiased, metric, and encoded within a coordinate system (polar, in this case) but is relatively difficult to maintain, and thus decays quickly. Categorical encoding is more robust and is relied upon to the extent that fine-grain information is not available. While the combination of these two types of information results in a net gain in the accuracy of memory-guided spatial behavior, categorical information (e.g., “the dot was in the top right quadrant”) causes bias toward the mean value, or prototype, of the category (see Fig. 1a).

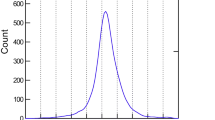
Schematics illustrating (a) the pattern of bias observed by Huttenlocher et al. (1991) and (b) the quintic pattern of bias predicted by the modified CAM of Haun et al. (2005) for the front hemispace. In panel b, bias on the y-axis (clockwise = positive bias, counterclockwise = negative bias) is plotted against the angular distance of the target measured from the participant’s heading
Models of spatial bias, including the CAM, suggest that patterns of bias observed in memory-based spatial tasks indicate how spaces are broken up into categories, or organized in memory. In the example above, an open circle was spontaneously organized into quadrants (see Fig. 1a). Haun, Allen, and Wedell (2005) examined the category structure of spatial memory for room-sized environments. Standing participants studied the locations of targets presented 1.5 m away at one of five azimuths, ranging between 2° and 88° to the left of the participant’s heading (see their Exp. 1). Blindfolded participants then indicated the remembered angular target location by both pointing and verbal estimate. Indicated target locations showed angular bias toward the center of the front left quadrant (45° left of the participant’s heading) for both response types, suggesting that this pattern of bias is not specific to a particular response modality (see also Spencer, Simmering, & Schutte, 2006).
In Experiment 2, Haun, Allen, & Wedell (2005) extended the azimuthal range over which targets were presented to cover the front 180°. This was done to examine the pattern of bias in what was predicted to be a multiple-category (i.e., front right and front left) task setting. Because Experiment 1 had shown similar results for verbal and pointing responses, only pointing responses were used in Experiment 2. Responses were biased toward the centers of the two front quadrants—that is, approximately 45° to the left and right of straight ahead. The inferred categories, with prototypes on the diagonals of a horizontal circle centered on the observer, corresponded nicely with those observed by Huttenlocher et al. (1991) in a figural circular field. In fact, Haun et al. presented a modified version of the CAM that, given the prediction that angular category prototypes will be 45° to the left and right of straight ahead, predicted the observed quintic pattern of bias represented schematically in Fig. 1b.
The present study addresses two related questions raised by Haun et al. (2005) that are important for the development of spatial memory models. First, was the observed category structure defined by egocentric (body-based) or allocentric (environment-based) reference frames? Second, and more importantly, if the categories are egocentrically defined, do they move relative to the environment as the observer moves; are they dynamic?
Previous work in this area has shown mixed results. Simmering, Peterson, Darling, and Spencer (2008) had trouble showing evidence of egocentrically defined bias in spatial memory at all. However, a number of researchers have shown bias in spatial responses, depending on the direction in which they are made relative to the body (Franklin, Henkel, & Zangas, 1995; Franklin & Tversky, 1990; Philbeck, Sargent, Arthur, & Dopkins, 2008), suggesting an influence of the egocentric reference frame established at retrieval. Researchers have demonstrated the flexibility of spatial categories (e.g., Hund & Plumert, 2005), but none have examined the relationship between egocentrically defined spatial categories and spatial updating. In the framework of the CAM, the suggestion that remembered category membership for a given object may be updated over self-motion is novel.
In the present study, participants learned the locations of several objects around them in a room from a fixed learning heading. This heading was aligned with the walls of the room and with a set of landmarks (paper flags) meant to provide a salient allocentric reference frame. Participants were blindfolded and then pointed to the targets after varying degrees of self-rotation. By introducing whole-body rotation between study and test, environmentally fixed allocentric reference frames could be placed at odds with the dynamic egocentric frame defined by the heading at retrieval. Thus, we may examine the relative influences of these two reference frames on the category structure of spatial memory. Specifically, we (1) modeled the present data using the most recent version of the modified CAM referenced above (Fitting et al., 2007) to compare the observed patterns of bias with those observed by Haun et al. (2005), and (2) tested specific, planned predictions consistent with the influence of either dynamic egocentric or allocentrically fixed reference frames.
Method
Participants
A group of 40 George Washington University undergraduates (34 females, 6 males) participated in this study in exchange for course credit. Their mean age was 19 years (range, 17–27). Four participants reported being left-handed.
Apparatus
The experiment took place inside a circular chamber (3.75 m in diameter) that was created within the larger experimental room by an opaque, black, ceiling-to-floor curtain. Participants were seated in a common wooden chair with arms and a low back that was affixed to the top of a swivel. The swivel was stiff enough so that it did not drift, but participants seated in the chair were able to easily rotate themselves using their feet. A pointing apparatus used in previous studies (Sargent, Dopkins, Philbeck, & Chichka, 2010) was secured to the arms of the chair and rotated with the participant. This apparatus allowed the chair and the pointer to share a common axis of rotation that was located within participants’ bodies, so that pointing responses might reflect, to the extent possible, self-to-object (egocentric) relationships (see Fig. 2).

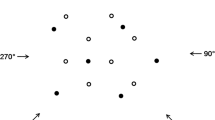
Schematic (not-to-scale) overhead view of the apparatus and target locations for Configuration 1. Target locations are indicated in degrees from the training heading. All target objects were roughly 1.5 m from the axis of rotation
Six target objects were used: a broom, a floor lamp, an upright vacuum, a chair, a 2 x 4 in. board (5 × 10 × 92 cm), and a coat rack. Two configurations of these objects were used: Configuration 1, shown in Fig. 2, and Configuration 2, which was an exact reversal or mirror image of Configuration 1. For example, the broom was 22.5° clockwise of the training heading (from which participants learned the arrays) in Configuration 1, and 22.5° counterclockwise of the training heading in Configuration 2. Two configurations were used to help control for effects on pointing error that might be caused by a particular configuration.
Four white paper “flags” (21.5 × 50 cm) were hung from the ceiling, long side vertically, just inside the curtain at 0°, 90°, 180°, and 270° relative to the training heading (see Fig. 2), which was perpendicular to the north wall of the larger experimental room. Thus, the four flags were aligned with the four walls of the larger experimental room, to which participants had full visual access before they entered the experimental chamber.
Procedure
Participants were pseudorandomly assigned to either Configuration 1 or 2, 20 to each configuration. Prior to training, the experimenter pointed out the four flags hanging inside the experimental chamber as “providing a frame of reference.”
Training phase
Participants learned the locations of the six objects while sitting in the chair, facing the training heading. Object locations were studied for as long as needed, typically less than 1 min, to enable pointing with eyes closed. Throughout training, participants were allowed to turn their heads to look at locations behind them. When ready, participants closed their eyes and pointed to the objects in random order. A response was scored as correct if the pointer was aimed within ±5° of the target object. After each incorrect response, participants opened their eyes, and the correct pointing direction was demonstrated. Each target was learned to criterion (three correct responses without an intervening incorrect response). Throughout the experiment, the pointer was returned to 0° on the pointer scale (corresponding to the participant’s heading) prior to each response.
Experimental phase
Throughout the experimental phase, participants wore a blindfold and hearing protectors. Participants began while facing the north wall of the experimental room (the training heading) and were instructed to rotate themselves clockwise until they felt like they were facing a particular target object (Response Heading 1). Participants were allowed to make slight adjustments (back and forth) until they were confident they were facing the appropriate object. Then they pointed, without feedback, to the remaining objects, three times each, as called out by an experimenter in random order. After completing the responses for a given response heading, participants were instructed to rotate themselves, clockwise, to the next response heading.
Each participant pointed to the targets from four response headings: facing the vacuum, facing the board (twice), and facing the training heading. Two sets of pointing responses were made from the board response heading because from this heading the pattern of bias observed by Haun et al. (2005) makes nearly opposite predictions, depending on whether that pattern is dynamic egocentric or allocentrically fixed. Thus, as explained below, the board response heading is the most diagnostic in determining the relative influences of the two reference frames. Each participant was randomly assigned to one of the three response heading orders that were possible, given that the training heading was never first and the board response heading was never used twice in a row.Footnote 1
Results
The observed response values were recorded as degrees clockwise from the actual heading (at time of response). Signed error (or “bias”) scores were calculated for each response as the difference between the observed and correct response values. Correct response values were calculated as the degrees clockwise from the response heading to the target. It is important to note that the response heading was that to which the participant had been instructed to rotate, regardless of the participant’s success in doing so. For each participant at each response heading, a single mean signed error value, along with a standard deviation, was calculated across the three pointings for each target. All means and variance scores were calculated using circular statistics (Batschelet, 1981).
Recall that the primary goal of this analysis was to examine whether the pattern of bias observed by Haun et al. (2005) is defined (1) by a dynamic egocentric reference frame that moves with the observer or (2) by a reference frame that is fixed to the environment. To examine Case 1 (see Figs. 3a–b and 4a–b), target direction (on the x-axis) was defined relative to response heading. To examine Case 2, target direction was defined relative to the training heading (see Figs. 3c–d and 4c–d).

Mean signed pointing error (bias) by condition relative to dynamic egocentric (a, b) and allocentrically fixed (c, d) reference frames. Zero on the x-axes represents the response heading in the former case (a, b), and the training heading in the latter (c, d). Error bars represent standard errors of the means across 20 participants. Dashed lines indicate the range of targets included in the present analyses, which do not attempt to explain effects for targets oriented behind the participant

Mean within-subjects variability by condition relative to dynamic egocentric (a, b) and allocentrically fixed (c, d) reference frames. Within-subjects variability is measured as the standard deviation across the three pointing responses made to each target, from each response heading, by each participant. Error bars represent the standard errors of the means across 20 participants. Dashed lines indicate the range of targets included in the present analyses, which do not attempt to explain effects for targets oriented behind the participant
Consistent with previous findings (Franklin et al., 1995), constant error or bias (Figs. 3a–b), and to a lesser extent variable error (Figs. 4a–b), increased with target eccentricity relative to response heading. Specifically, responses made to targets in the rear hemispace showed bias toward egocentric front. Philbeck et al. (2008) concluded that this pattern may be caused by perceptual factors (e.g., non-Euclidean properties of visual space). We are therefore hesitant to draw conclusions about the category structure of spatial memory based on data from this region. Thus, data from the rear hemispace relative to egocentric front (response heading) were excluded from all analyses and from Figs. 3c–d and 4c–d. Because no clear pattern emerged in the variable error results, these will not be addressed further.Footnote 2
To compare our results with those of Haun et al. (2005), who only gathered data from the front hemispace, we now focus on the range, in Fig. 3, between −90 and 90 on the x-axes. Visual inspection of the data suggests that the pattern of bias relative to the dynamic egocentric frame (Figs. 3a–b) is more consistently similar, across different response headings, to the quintic pattern observed by Haun et al. (Fig. 1b) than is the pattern of bias relative to the allocentrically fixed frame (Figs. 3c–d).
To test this result, we fit the modified CAM presented by Fitting et al. (2007, see their Eqs. 2 and 4; see the Appendix) to the present data. A linear simplex algorithm in MATLAB was used to fit the data (1) with target direction defined relative to a dynamic egocentric frame (Fig. 5a) and (2) with target direction defined relative to an allocentrically fixed frame (Fig. 5b). Because of the limited number of target directions available from any single response heading, and because results were similar across the two configuration groups, we collapsed across these conditions for this analysis. In accordance with Haun et al. (2005), we modeled data from the front hemispace. Relative to the training heading (Case 2), this range contained eight targets. Therefore, we also modeled the front eight targets relative to egocentric frame at the time of response (Case 1). In both cases, we fit one- and two-category versions of the model (using three and four parameters, respectively) to eight data points (see Table 1). Tests to compare nested models showed that the improved fit of the more complicated (two-category) model justified the additional parameter in Case 1 [F(1, 5) = 39.64, p = .003], but not in Case 2 [F(1, 5) = 1.36, p > .05]. Thus, the two-category version is the best model in Case 1, and the more parsimonious, one-category version is the best model in Case 2.

Mean signed pointing error (bias) for targets within the front hemispace relative to (a) dynamic egocentric and (b) allocentrically fixed reference frames, collapsed across conditions. In panel a, for example, the bias value at 45° on the x-axis is the mean bias across all pointing responses made to any target 45° clockwise from the corresponding response heading. In panel b, the bias value at 45° on the x-axis is the mean across all pointing responses made to the broom and the coat rack for participants assigned to Configurations 1 and 2, respectively. Functions indicate the best-fitting models, which in panels a and b were the two- and one-category versions, respectively
Figure 5a shows that when bias is defined relative to a dynamic egocentric frame (Case 1), the best model (the two-category version) fits very well. The prototypes produced by this model were somewhat more eccentric than those observed by Haun et al. (2005). This may reflect the category structure of egocentrically defined, room-scale space when the azimuthal range of that space is not limited to the front 180°. Figure 5b shows that when bias is defined relative to an allocentrically fixed frame (Case 2), the best model (the one-category version) fits relatively poorly. Overall, these results support the conclusion that the pattern of bias observed by Haun et al. appears to move with the observer.
Finally, we examined data from the board response heading where the influences of dynamic egocentric and allocentrically fixed reference frames made independent, contrasting predictions. Imagine making a copy of the bias function depicted in Fig. 1b, pasting it over the original function, and then displacing it by 45° along the x-axis. These resulting functions, perfectly out of phase, represent the bias patterns predicted by dynamic egocentric and allocentrically fixed reference frames from the board response heading. These patterns would contrast most for targets around ±22.5° and ±67.5° from 0°. The present analysis focused on this critical case, examining bias for pointing responses made to the coat rack and the broom from the board response heading.Footnote 3 The influence of a dynamic egocentric frame predicts that the targets would show bias toward the training heading (a category prototype within the dynamic egocentric frame). The influence of an allocentrically fixed frame predicts that the targets would show bias away from the training heading (a category boundary within the allocentrically fixed frame). Bias values for all targets clockwise from the training heading were multiplied by −1, so that bias toward and away from this heading would result in positive and negative values, respectively. Thus, a mean bias value greater than or less than zero would support the influence of the dynamic egocentric or of the allocentrically fixed reference frame, respectively. Because the distribution of mean bias values across participants was skewed, Wilcoxon signed-rank tests were used. The mean bias score (M = 4.8°) was significantly greater than zero [z(39) = 2.3, p = .02], suggesting the influence of dynamic egocentric rather than allocentrically fixed reference frames.Footnote 4
Discussion
The primary goal of this study was to determine whether a particular pattern of bias previously observed in pointing to remembered target locations (Haun et al. 2005) was defined by a dynamic egocentric reference frame that moved with the observer, or by a reference frame that was fixed to the environment. The present evidence suggests that this pattern was primarily defined by a dynamic egocentric reference frame. Across different response headings, the pattern of bias observed in the front hemispace was plotted (1) relative to a dynamic egocentric frame and (2) relative to an allocentrically fixed frame. In Case 1, but not in Case 2, the data consistently showed the same general pattern observed by Haun et al. Critically, when the two reference frames were put at odds, we observed the pattern of bias predicted by the dynamic egocentric frame.
These results should not be interpreted as suggesting that allocentrically defined categories exert no influence on memory-based spatial behavior; such influence is well established (e.g., Huttenlocher, Newcombe, & Sandberg, 1994; Mou, McNamara, Valiquette, & Rump, 2004). Rather, the important contribution of the present results, in terms of the CAM, is the evidence that categorical spatial codes for particular objects appear to change (are updated) on the basis of ongoing self-motion cues. This is inconsistent with the view of categorical codes as stable, long-term representations, and is more in line with recent versions of the CAM that emphasize the role played by dynamic category information available at response (e.g., Sampaio & Wang, 2010). The present results do raise the issue of how, within the CAM, metric and categorical information might interact during the updating process. It is possible that online updating involves metric codes, with new egocentric categorical codes generated on the basis of the updated metric information once updating is complete, or perhaps only when egocentric information is needed (e.g., in order to make a pointing response). However, if we assume that the influence of categorical information is related to the benefit such influence confers in terms of pointing accuracy, it makes sense for categorical codes to be maintained/updated throughout the updating process, or at least generated soon after updating is completed. The relative durability of categorical codes over time is of little benefit if such codes are generated only at the time of response.
The present results may also be considered in terms of dynamic field theory (DFT), an alternative to the CAM. DFT suggests that during maintenance of a location in memory, the particular neural population dynamics in this framework cause category bias to emerge as repulsion away from perceived reference directions (see Spencer, Simmering, Schutte, & Schöner, 2007, for details). Because DFT posits no distinct categorical spatial codes per se, how such codes might be updated over self-motion is not an issue. However, studies using the DFT framework have had difficulty producing evidence of egocentrically defined or memory-based reference frames at all. For example, Simmering et al. (2008) required blindfolded participants to maintain a single target location (within arm’s reach) over intervals of up to 15 s, during which ego- and allocentric frames remained aligned. More work is needed to clarify why egocentrically defined category bias was observed in the present study, but not by Simmering et al. It appears that the influence of the egocentric reference frame emerges during the retention of multiple target locations outside of peripersonal space, over the much longer intervals used in the present study. Also, the egocentric frame may become increasingly salient when, during maintenance of remembered locations, its relationship with an established allocentric frame is changed by self-motion. These issues provide interesting avenues for future research.
Notes
The data presented here are collapsed across response heading orders.
Responses made from the board response heading to targets (i.e., the lamp) 67.5º from the training heading were in the rear hemispace relative to egocentric front, and so were not included.
The possibility that these results only reflect bias toward the allocentrically fixed training heading is unlikely because, as depicted in Fig. 3c–d, from both training and vacuum response headings the coat rack and the broom showed bias away from the training heading.
References
Batschelet, E. (1981). Circular statistics in biology. London: Academic Press.
Carbon, C.-C., & Leder, H. (2005). The wall inside the brain: Overestimation of distances crossing the former Iron Curtain. Psychonomic Bulletin & Review, 12, 746–750.
Fitting, S., Wedell, D., & Allen, G. (2007). Memory for spatial location: Cue effects as a function of field rotation. Memory & Cognition, 35, 1641–1658.
Franklin, N., Henkel, L. A., & Zangas, T. (1995). Parsing surrounding space into regions. Memory & Cognition, 23, 397–407. doi:10.3758/BF03197242
Franklin, N., & Tversky, B. (1990). Searching imagined environments. Journal of Experimental Psychology. General, 119, 63–76.
Haun, D., Allen, G., & Wedell, D. (2005). Bias in spatial memory: A categorical endorsement. Acta Psychologica, 118, 149–170.
Hund, A. M., & Plumert, J. M. (2005). The stability and flexibility of spatial categories. Cognitive Psychology, 50, 1–44.
Huttenlocher, J., Hedges, L. V., & Duncan, S. (1991). Categories and particulars: Prototype effects in estimating spatial location. Psychological Review, 98, 352–376. doi:10.1037/0033-295X.98.3.352
Huttenlocher, J., Newcombe, N. S., & Sandberg, E. H. (1994). The coding of spatial location in young children. Cognitive Psychology, 27, 115–147.
Mou, W., McNamara, T. P., Valiquette, C. M., & Rump, B. (2004). Allocentric and egocentric updating of spatial memories. Journal of Experimental Psychology. Learning, Memory, and Cognition, 30, 142–157. doi:10.1037/0278-7393.30.1.142
Philbeck, J., Sargent, J., Arthur, J., & Dopkins, S. (2008). Large manual pointing errors, but accurate verbal reports, for indications of target azimuth. Perception, 37, 511–538.
Sampaio, C., & Wang, R. F. (2010). Overcoming default categorical bias in spatial memory. Memory & Cognition, 38, 1041–1048.
Sargent, J., Dopkins, S., Philbeck, J., & Chichka, D. (2010). Chunking in spatial memory. Journal of Experimental Psychology. Learning, Memory, and Cognition, 36, 576–589.
Schmidt, T. (2004). Spatial distortions in visual short-term memory: Interplay of intrinsic and extrinsic reference systems. Spatial Cognition and Computation, 4, 313–336.
Simmering, V. R., Peterson, C., Darling, W., & Spencer, J. P. (2008). Location memory biases reveal the challenges of coordinating visual and kinesthetic reference frames. Experimental Brain Research, 184, 165–178. doi:10.1007/s00221-007-1089-7
Spencer, J. P., & Hund, A. M. (2002). Prototypes and particulars: Geometric and experience-dependent spatial categories. Journal of Experimental Psychology. General, 131, 16–37.
Spencer, J. P., Simmering, V. R., & Schutte, A. R. (2006). Toward a formal theory of flexible spatial behavior: Geometric category biases generalize across pointing and verbal response types. Journal of Experimental Psychology. Human Perception and Performance, 32, 473–490. doi:10.1037/0096-1523.32.2.473
Spencer, J. P., Simmering, V. R., Schutte, A. R., & Schöner, G. (2007). What does theoretical neuroscience have to offer the study of behavioral development? Insights from a dynamic field theory of spatial cognition. In J. M. Plumert & J. P. Spencer (Eds.), The emerging spatial mind (pp. 320–361). New York: Oxford University Press.
Stevens, A., & Coupe, P. (1978). Distortions in Judged Spatial Relation. Cognitive Psychology, 10, 422–437.
Author Note
This research was partially supported by NIH Grant R01 MH067674-01 to J.P.
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
According to Fitting et al. (2007), the probability of recruiting the prototype from category j (p j ) given a particular target direction (angle) μ, and k categories, is determined by the following equation:
This equation is combined with a second (below) in order to model the pattern of expected bias given, in the present case, three or four parameters: one or two inferred prototypes (p 1 and p 2), the weighting of fine-grain information (λ), and a boundary discriminability parameter (c), which reflects the sharpness of the boundaries and is negatively correlated with the influence of the wrong prototypes (e.g., those from adjacent categories):
To address the discontinuity associated with treating circular data as if they were linear, this model includes “virtual” category midpoints corresponding to the lowest- and highest-valued prototypes, plus and minus 360, respectively.
Rights and permissions
About this article
Cite this article
Sargent, J., Dopkins, S. & Philbeck, J. Dynamic category structure in spatial memory. Psychon Bull Rev 18, 1105–1112 (2011). https://doi.org/10.3758/s13423-011-0139-0
Published:
Issue Date:
DOI: https://doi.org/10.3758/s13423-011-0139-0