
Parameterization of a Hydrological Model for a Large, Ungauged Urban Catchment

Abstract
:1. Introduction
2. Materials and Methods
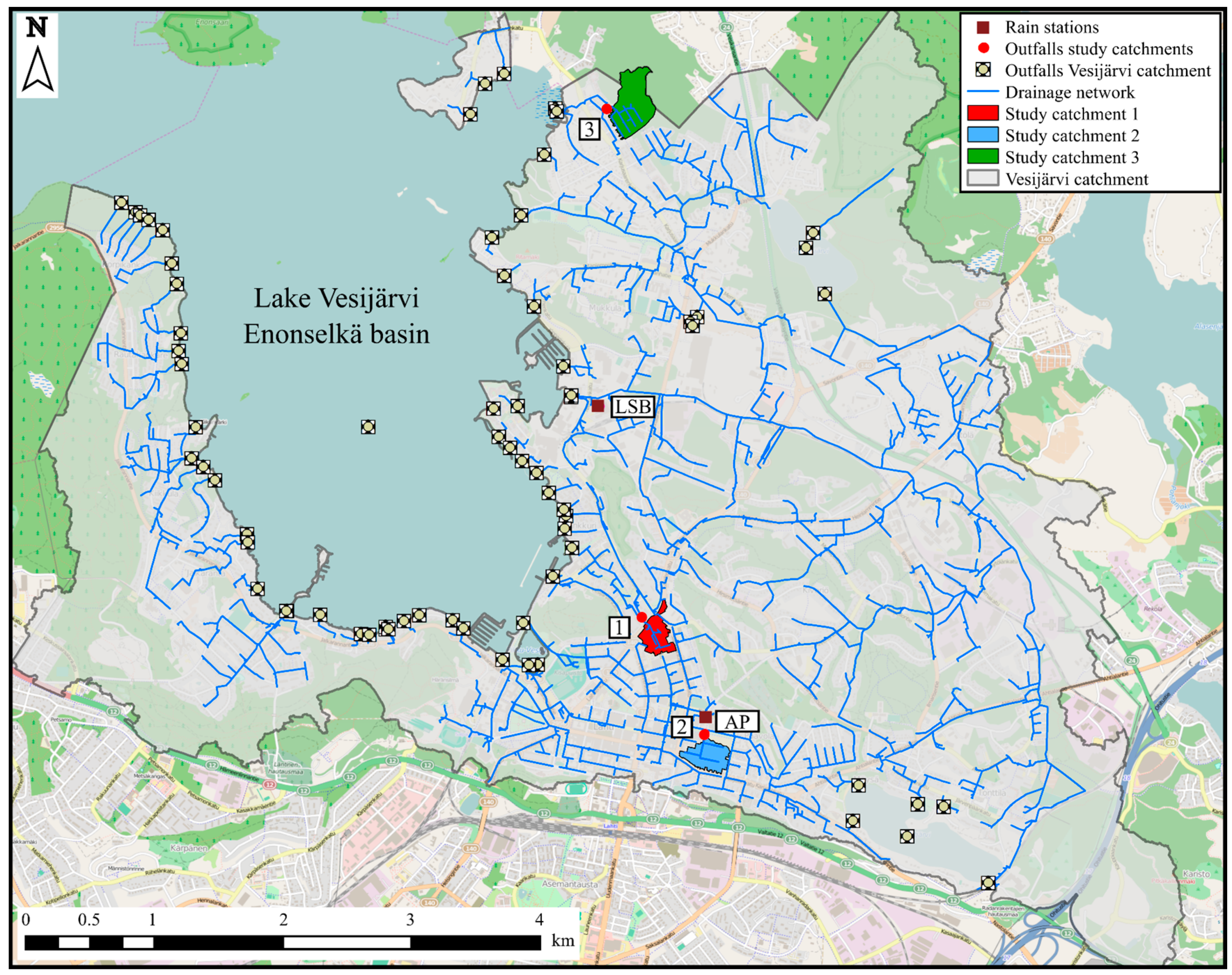
2.1. Study Site and Data
2.2. DEM-Based Delineation (LR-DEM)
2.3. Parameter Regionalization
3. Results
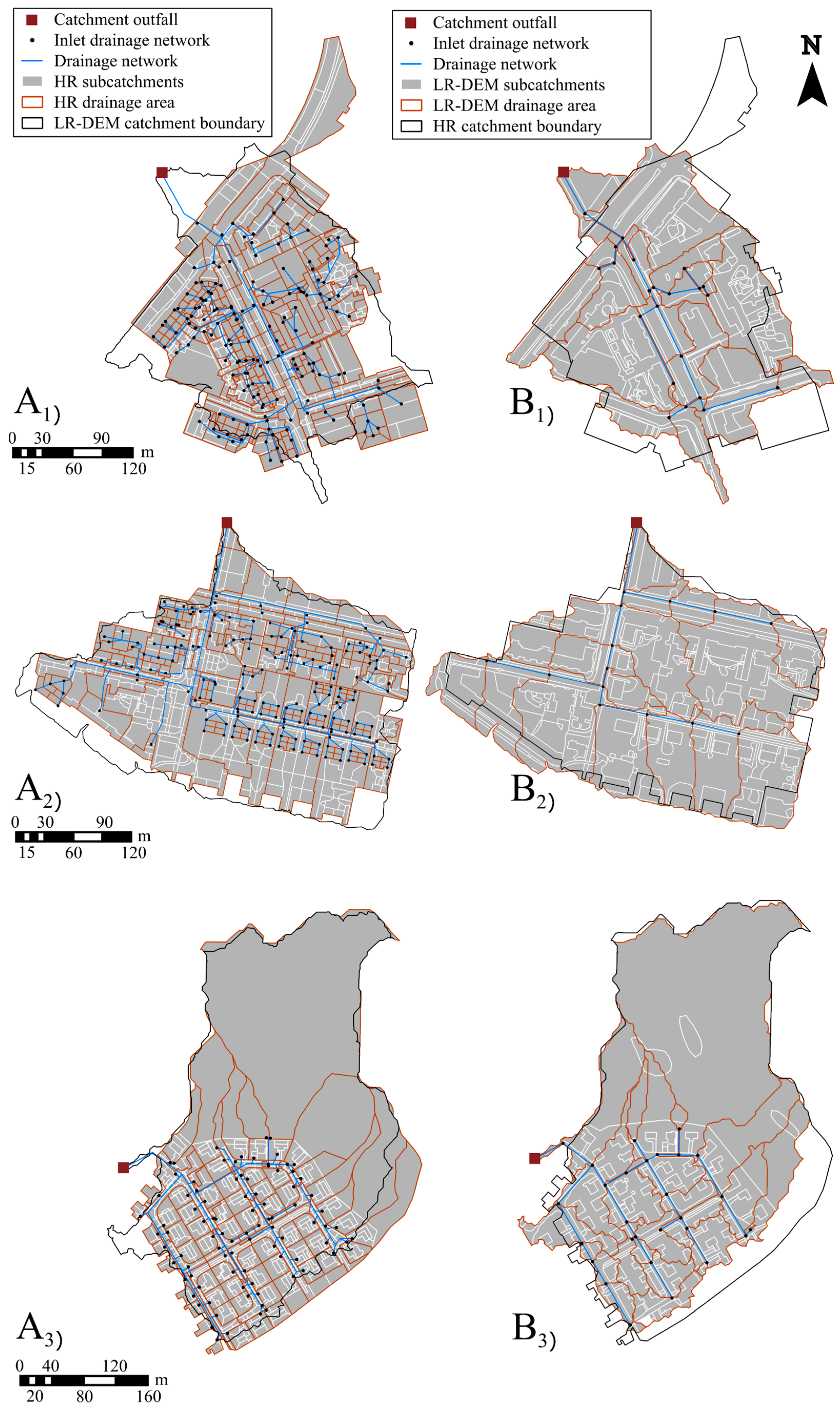
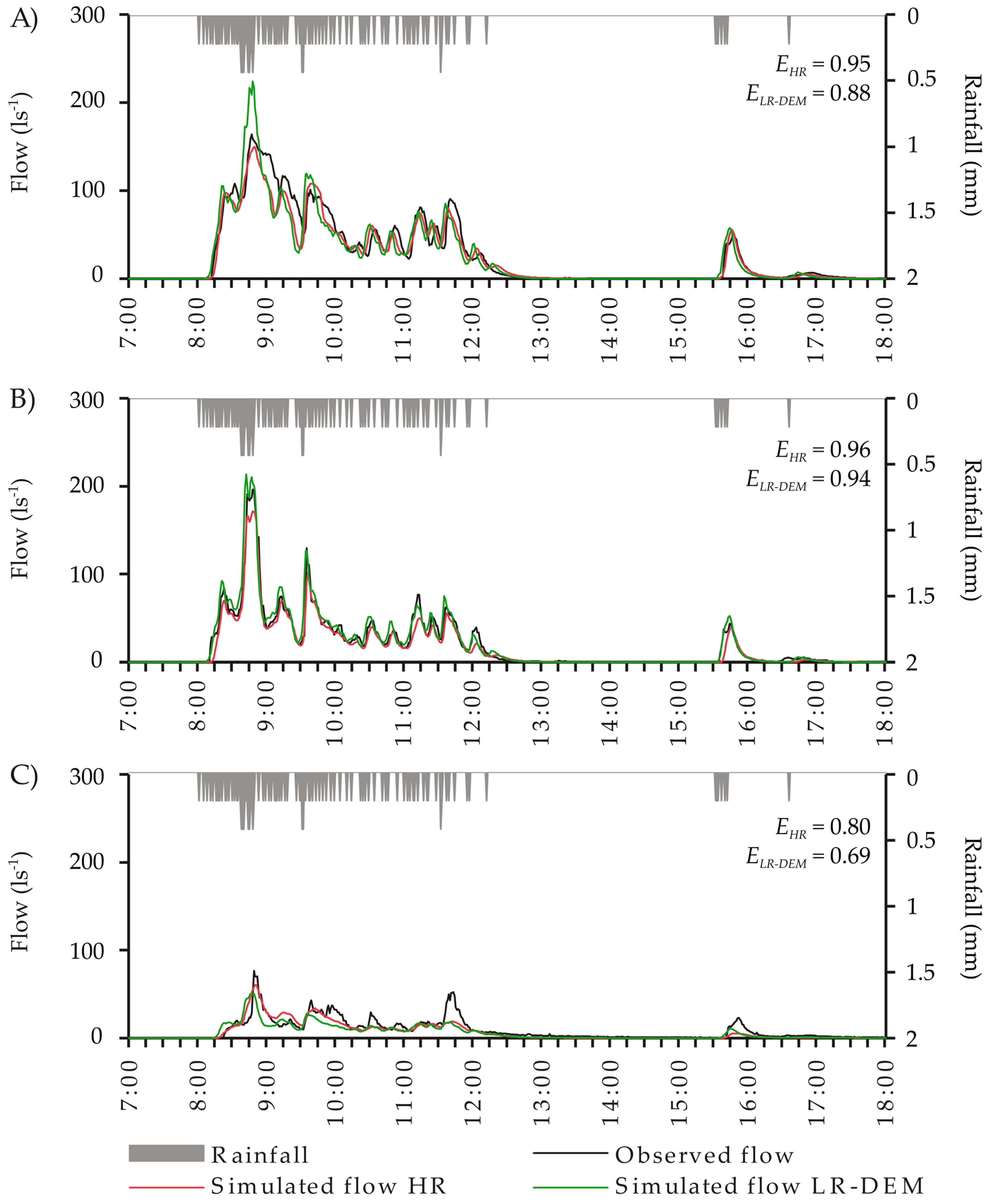
3.1. DEM Delineation
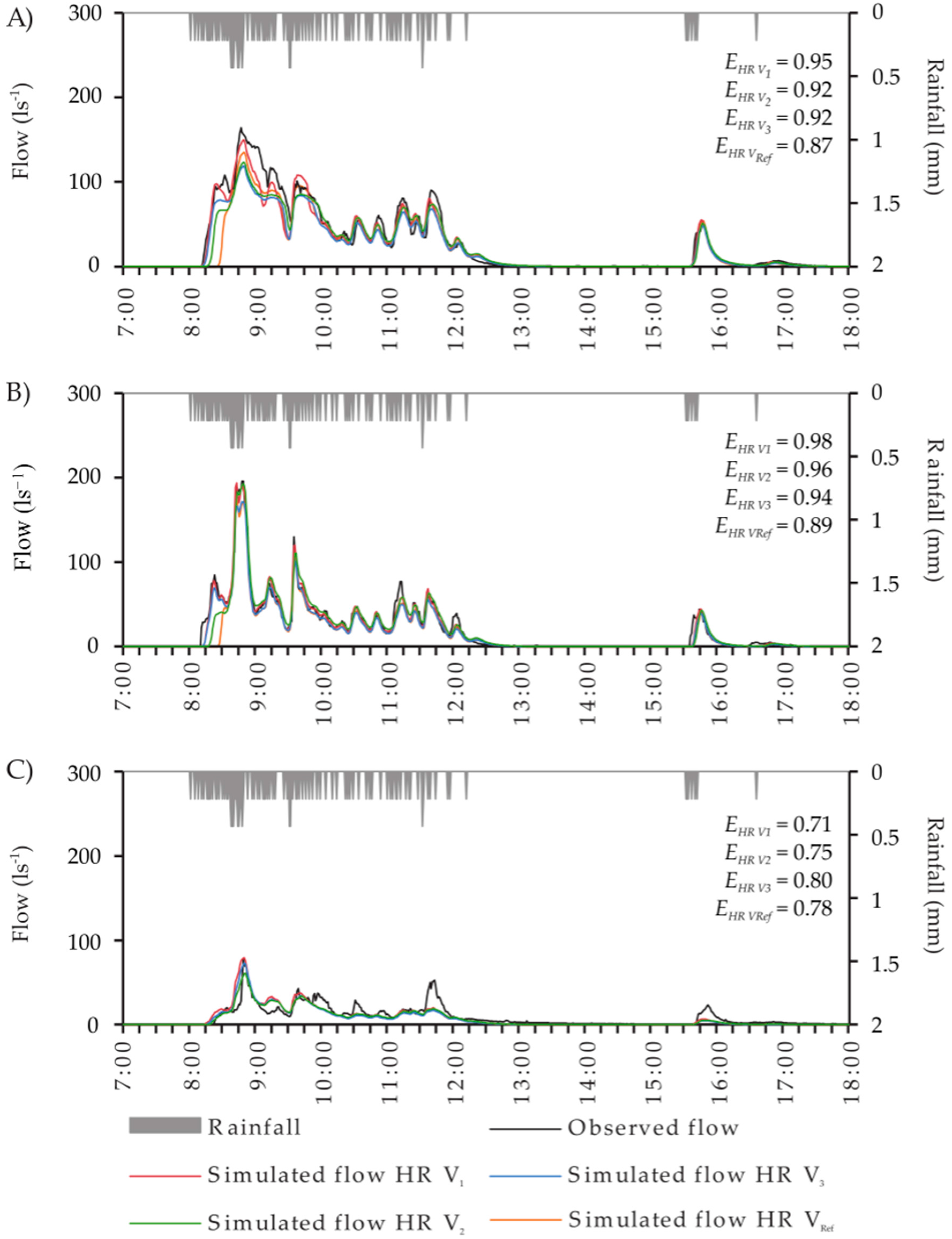
3.2. Parameter Regionalization
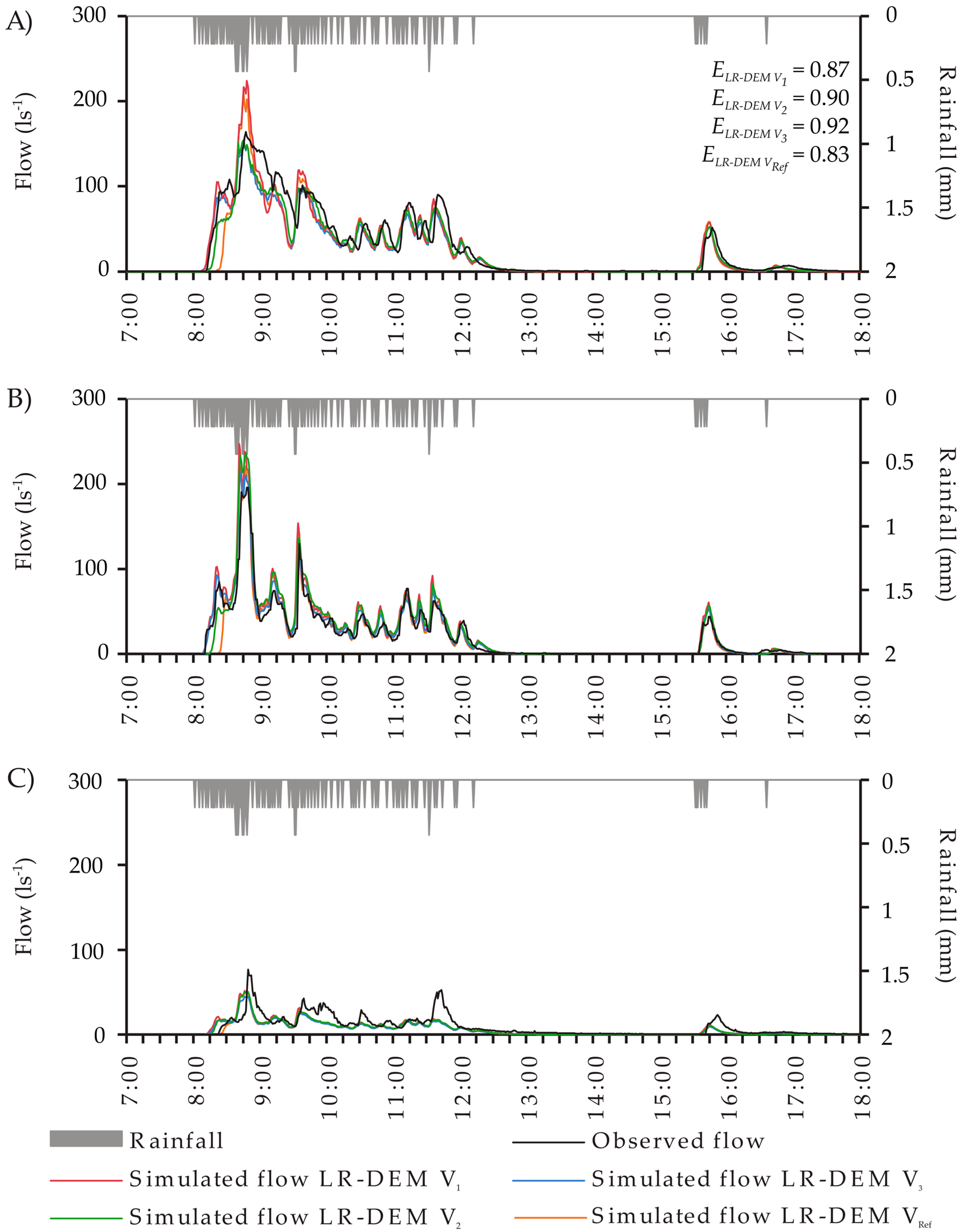
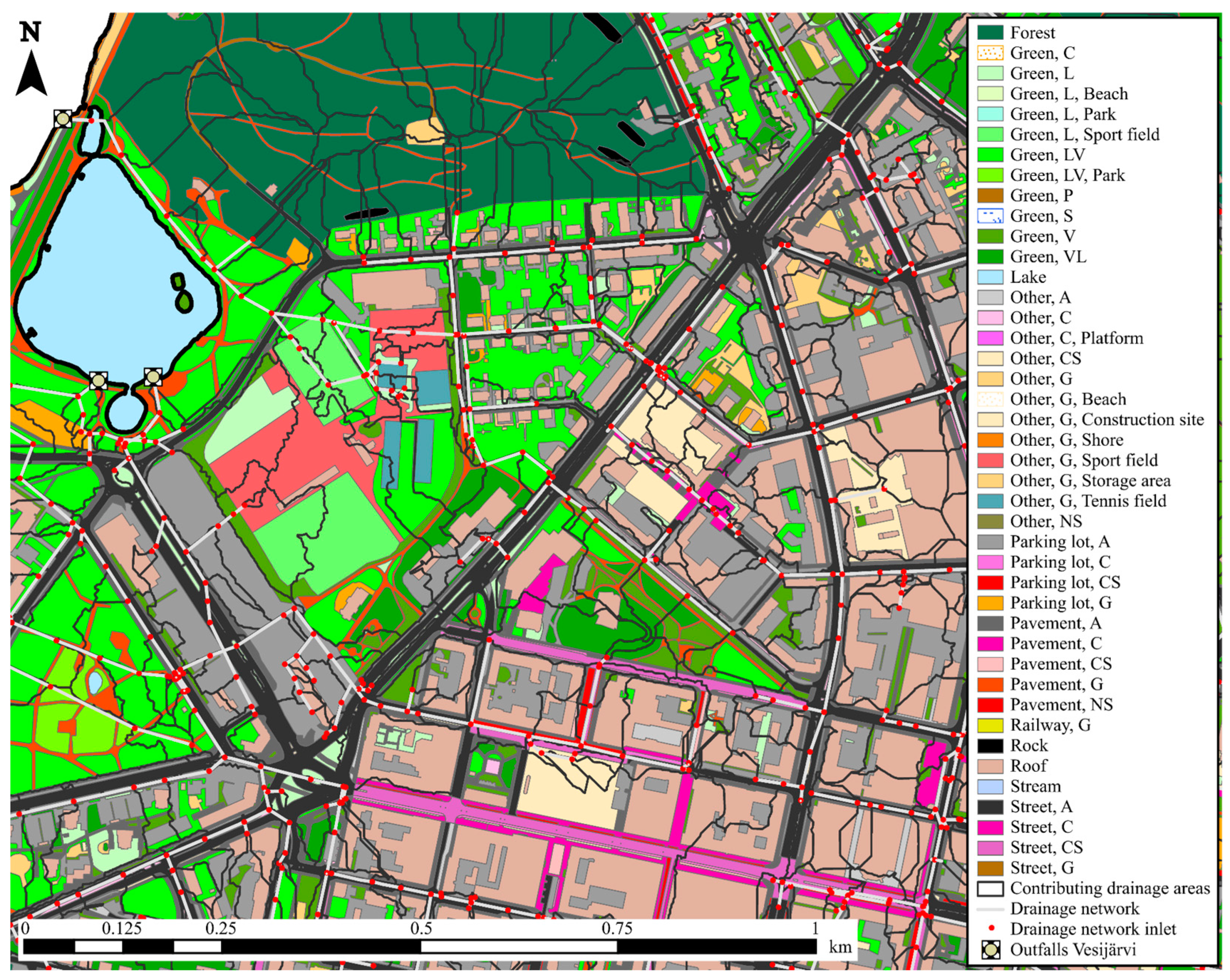
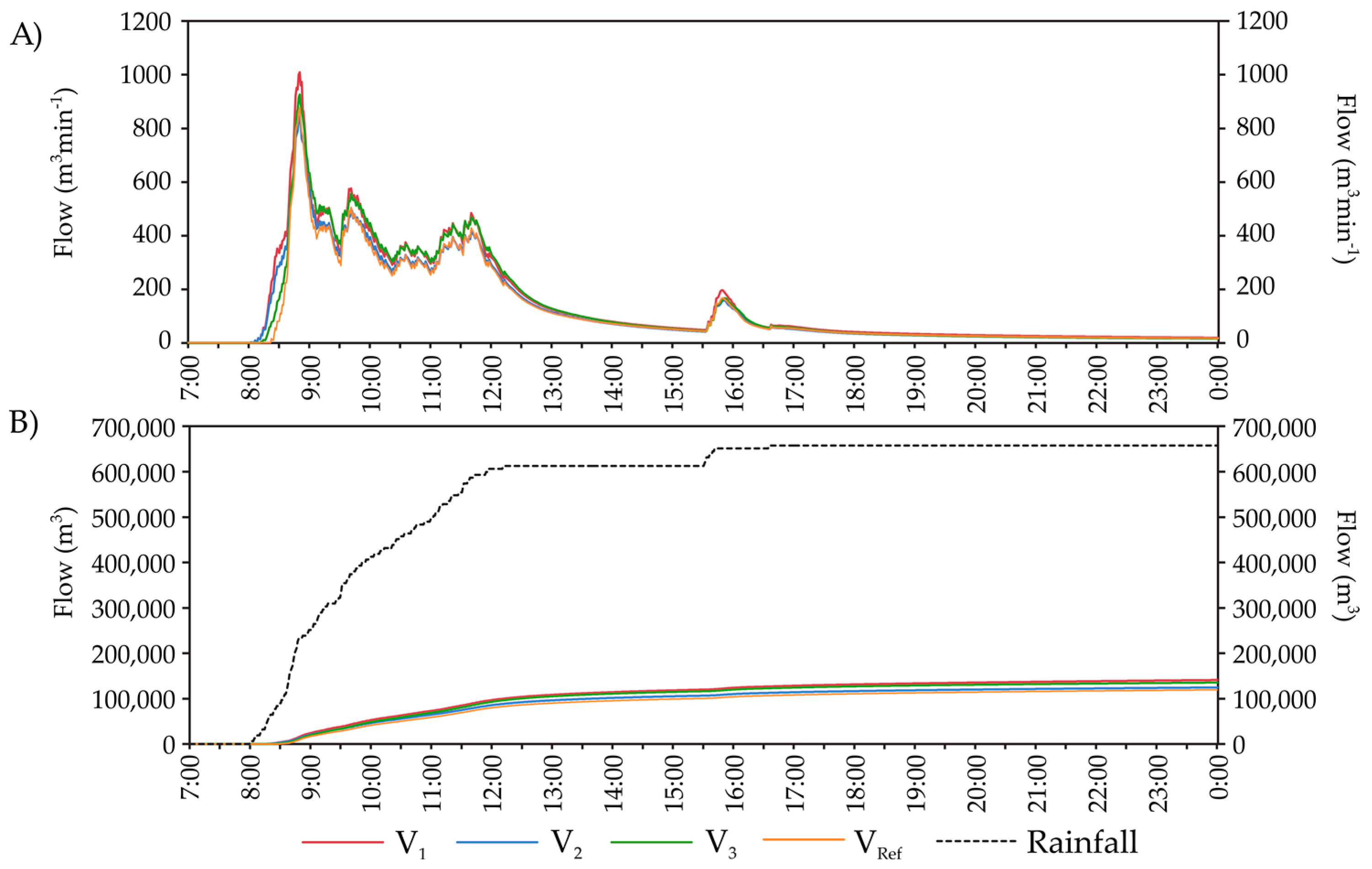
3.3. Vesijärvi Catchment Model
4. Discussion
5. Concluding Remarks
- while the simplifications induced by the automated, DEM-based delineation process affect the simulated urban runoff, the simulation results remain acceptable;
- a transfer of parameter values that were calibrated to high-resolution study catchments to ungauged areas is preferable to a parameterization using the available literature;
- simulation results for three different urban catchments and a large number of rainfall events with varying characteristics show that the proposed catchment discretization produces identifiable model parameters; and
- the detailed surface discretization allows for the explicit spatial description of various LID scenarios (e.g., green roofs, pervious pavers, or disconnection of impervious surfaces), supporting the evaluation of alternative urban water management strategies.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Schueler, T.R. The importance of imperviousness. Watershed Prot. Tech. 1994, 1, 100–111. [Google Scholar]
- Arnold, C.L., Jr.; Gibbons, C.J. Impervious surface coverage: The emergence of a key environmental indicator. J. Am. Plan. Assoc. 1996, 62, 243–258. [Google Scholar] [CrossRef]
- Bannerman, R.T.; Owens, D.W.; Dodds, R.B.; Hornewer, N.J. Sources of pollutants in Wisconsin stormwater. Water Sci. Technol. 1993, 28, 241–259. [Google Scholar]
- Beighley, E.; Kargar, M.; He, Y. Effects of impervious area estimation methods on simulated peak discharges. J. Hydrol. Eng. 2009, 14, 388–398. [Google Scholar] [CrossRef]
- Booth, D.B.; Jackson, C.R. Urbanization of aquatic systems: Degradation thresholds, stormwater detection, and the limits of mitigation. J. Am. Water Resour. Assoc. 1997, 33, 1077–1090. [Google Scholar] [CrossRef]
- Brabec, E.A. Imperviousness and land-use policy: Toward an effective approach to watershed planning. J. Hydrol. Eng. 2009, 14, 425–433. [Google Scholar] [CrossRef]
- Guan, M.; Sillanpää, N.; Koivusalo, H. Modelling and assessment of hydrological changes in a developing urban catchment. Hydrol. Process. 2015, 29, 2880–2894. [Google Scholar] [CrossRef]
- Haase, D. Effects of urbanisation on the water balance-A long-term trajectory. Environ. Impact Assess. Rev. 2009, 29, 211–219. [Google Scholar] [CrossRef]
- Lee, J.G.; Heaney, J.P. Estimation of urban imperviousness and its impacts on storm water systems. J. Water Resour. Plan. Manag. 2003, 129, 419–426. [Google Scholar] [CrossRef]
- Ruth, O. The effects of de-icing in Helsinki urban streams, Southern Finland. Water Sci. Technol. 2003, 48, 33–43. [Google Scholar] [PubMed]
- Maksimovic, C. General overview of urban drainage principles and practice. In Urban Drainage in Specific Climates, Volume 2: Urban Drainage in Cold Climates; Saegrov, S., Milina, J., Thorolfsson, S., Eds.; UNESCO: Paris, France, 2000; pp. 1–21. [Google Scholar]
- The United States Environmental Protection Agency (US EPA). Low Impact Development (LID)—A Literature Review; US EPA Office of Water: Washington, DC, USA, 2000.
- Roy, A.H.; Wenger, S.J.; Fletcher, T.D.; Walsh, C.J.; Ladson, A.R.; Shuster, W.D.; Thurston, H.W.; Brown, R.R. Impediments and solutions to sustainable, watershed-scale urban stormwater management: Lessons from Australia and the United States. Environ. Manag. 2008, 42, 344–359. [Google Scholar] [CrossRef] [PubMed]
- Butler, D.; Davies, J.W. Urban Drainage, 3rd ed.; Spon Press: Oxon, UK, 2011. [Google Scholar]
- Cheng, M.-S.; Coffman, L.S.; Clar, M.L. Low-impact development hydrologic analysis. In Proceedings of the Specialty Symposium Held in Conjunction with the World Water and Environmental Resources Congress, Orlando, FL, USA, 20–24 May 2001; Brashear, R.W., Maksimovic, C., Eds.; ASCE: Orlando, FL, USA, 2001; pp. 659–681. [Google Scholar]
- Huber, W.C.; Dickinson, R.E. Storm Water Management Model Manual Version 4: User’s Manual; US EPA: Athens, GA, USA, 1988.
- Rossman, L.A. Storm Water Management Model User’s Manual Version 5; US EPA National Risk Management Research Laboratory: Cincinnati, OH, USA, 2010.
- Elliott, A.H.; Trowsdale, S.A. A review of models for low impact urban stormwater drainage. Environ. Model. Softw. 2007, 22, 394–405. [Google Scholar] [CrossRef]
- Amaguchi, H.; Kawamura, A.; Olsson, J.; Takasaki, T. Development and testing of a distributed urban storm runoff event model with a vector-based catchment delineation. J. Hydrol. 2012, 420–421, 205–215. [Google Scholar] [CrossRef]
- Rodriguez, F.; Andrieu, H.; Creutin, J.-D. Surface runoff in urban catchments: morphological identification of unit hydrographs from urban databanks. J. Hydrol. 2003, 283, 146–168. [Google Scholar] [CrossRef]
- Cantone, J.P.; Schmidt, A.R. An innovative approach for modeling large urban hydrologic systems. In Proceedings of the World Environmental and Water Resources Congress, Kansas City, MO, USA, 17–21 May 2009; ASCE: Reston, VA, USA, 2009; Volume 342, pp. 824–839. [Google Scholar]
- Gironás, J.; Niemann, J.D.; Roesner, L.A.; Rodriguez, F.; Andrieu, H. Evaluation of methods for representing Urban Terrain in storm-water modeling. J. Hydrol. Eng. 2010, 15, 1–14. [Google Scholar] [CrossRef]
- Krebs, G.; Kokkonen, T.; Valtanen, M.; Setälä, H.; Koivusalo, H. Spatial resolution considerations for urban hydrological modelling. J. Hydrol. 2014, 512, 482–497. [Google Scholar] [CrossRef]
- Jacqueminet, C.; Kermadi, S.; Michel, K.; Béal, D.; Gagnage, M.; Branger, F.; Jankowfsky, S.; Braud, I. Land cover mapping using aerial and VHR satellite images for distributed hydrological modelling of periurban catchments: Application to the Yzeron catchment (Lyon, France). J. Hydrol. 2013, 485, 68–83. [Google Scholar] [CrossRef]
- Eric, M.; Fan, C.; Joksimovic, D.; Li, J.Y.; Walters, M. Urban hydrological response units for modelling low impact developments. In Proceedings of the Annual Conference of Canadian Society for Civil Engineering 2012: Leadership in Sustainable Infrastructure (1), Edmonton, AB, Canada, 6–9 June 2012; Curran Associates: Edmonton, AB, Canada, 2012; Volume 1, pp. 665–674. [Google Scholar]
- Palla, A.; Berretta, C.; Lanza, L.G.; La Barbera, P. Modelling storm water control operated by green roofs at the urban catchment scale. In Proceedings of the 11th International Conference on Urban Drainage (ICUD), Edinburgh, Scotland, UK, 31 August–5 September 2008; Oldenbourg Industrieverlag: Munich, Germany, 2008; pp. 1–10. [Google Scholar]
- Carter, T.; Jackson, C.R. Vegetated roofs for stormwater management at multiple spatial scales. Landsc. Urban Plan. 2007, 80, 84–94. [Google Scholar] [CrossRef]
- Mentens, J.; Raes, D.; Hermy, M. Green roofs as a tool for solving the rainwater runoff problem in the urbanized 21st century? Landsc. Urban Plan. 2006, 77, 217–226. [Google Scholar] [CrossRef]
- Montalto, F.; Behr, C.; Alfredo, K.; Wolf, M.; Arye, M.; Walsh, M. Rapid assessment of the cost-effectiveness of low impact development for CSO control. Landsc. Urban Plan. 2007, 82, 117–131. [Google Scholar] [CrossRef]
- Versini, P.-A.; Jouve, P.; Ramier, D.; Berthier, E.; de Gouvello, B. Use of green roofs to solve storm water issues at the basin scale-Study in the Hauts-de-Seine County (France). Urban Water J. 2016, 13, 372–381. [Google Scholar] [CrossRef]
- Versini, P.-A.; Ramier, D.; Berthier, E.; de Gouvello, B. Assessment of the hydrological impacts of green roof: From building scale to basin scale. J. Hydrol. 2015, 524, 562–575. [Google Scholar] [CrossRef] [Green Version]
- Smith, M.B.; Vidmar, A. Data set derivation for GIS-based urban hydrological modeling. Photogramm. Eng. Remote Sens. 1994, 60, 67–76. [Google Scholar]
- Jankowfsky, S.; Branger, F.; Braud, I.; Gironás, J.; Rodriguez, F. Comparison of catchment and network delineation approaches in complex suburban environments: Application to the Chaudanne catchment, France. Hydrol. Process. 2013, 27, 3747–3761. [Google Scholar] [CrossRef]
- Brown, J.D.; Spencer, T.; Moeller, I. Modeling storm surge flooding of an urban area with particular reference to modeling uncertainties: A case study of Canvey Island, United Kingdom. Water Resour. Res. 2007, 43, W06402. [Google Scholar] [CrossRef]
- Daniel, E.B.; Camp, J.V.; le Boeuf, E.J.; Penrod, J.R.; Abkowitz, M.D.; Dobbins, J.P. Watershed modeling using GIS technology: A critical review. J. Spat. Hydrol. 2010, 10, 13–28. [Google Scholar]
- Fewtrell, T.J.; Bates, P.D.; Horritt, M.; Hunter, N.M. Evaluating the effect of scale in flood inundation modelling in urban environments. Hydrol. Process. 2008, 22, 5107–5118. [Google Scholar] [CrossRef]
- Mason, D.C.; Horritt, M.S.; Hunter, N.M.; Bates, P.D. Use of fused airborne scanning laser altimetry and digital map data for urban flood modelling. Hydrol. Process. 2007, 21, 1436–1447. [Google Scholar] [CrossRef]
- Neal, J.C.; Bates, P.D.; Fewtrell, T.J.; Hunter, N.M.; Wilson, M.D.; Horritt, M.S. Distributed whole city water level measurements from the Carlisle 2005 urban flood event and comparison with hydraulic model simulations. J. Hydrol. 2009, 368, 42–55. [Google Scholar] [CrossRef]
- Fewtrell, T.J.; Duncan, A.; Sampson, C.C.; Neal, J.C.; Bates, P.D. Benchmarking urban flood models of varying complexity and scale using high resolution terrestrial LiDAR data. Phys. Chem. Earth 2011, 36, 281–291. [Google Scholar] [CrossRef]
- Sampson, C.C.; Fewtrell, T.J.; Duncan, A.; Shaad, K.; Horritt, M.S.; Bates, P.D. Use of terrestrial laser scanning data to drive decimetric resolution urban inundation models. Adv. Water Resour. 2012, 41, 1–17. [Google Scholar] [CrossRef]
- Kay, A.L.; Jones, D.A.; Crooks, S.M.; Kjeldsen, T.R.; Fung, C.F. An investigation of site-similarity approaches to generalisation of a rainfall-runoff model. Hydrol. Earth Syst. Sci. 2007, 11, 500–515. [Google Scholar] [CrossRef]
- Rodriguez, F.; Cudennec, C.; Andrieu, H. Application of morphological approaches to determine unit hydrographs of urban catchments. Hydrol. Process. 2005, 19, 1021–1035. [Google Scholar] [CrossRef]
- Rodriguez, F.; Bocher, E.; Chancibault, K. Terrain representation impact on periurban catchment morphological properties. J. Hydrol. 2013, 485, 54–67. [Google Scholar] [CrossRef]
- Sefton, C.E.M.; Howarth, S.M. Relationships between dynamic response characteristics and physical descriptors of catchments in England and Wales. J. Hydrol. 1998, 211, 1–16. [Google Scholar] [CrossRef]
- Seibert, J. Regionalisation of parameters for a conceptual rainfall-runoff model. Agric. For. Meteorol. 1999, 98–99, 279–293. [Google Scholar] [CrossRef]
- Andréassian, V.; Hall, A.; Chahinian, N.; Schaake, J. Introduction and Synthesis: Why should hydrologists work on a large number of basin data sets? In Large Sample Basin Experiments for Hydrological Model Parameterization: Results of the Model Parameter Experiment-MOPEX; Andréassian, V., Hall, A., Chahinian, N., Schaake, J., Eds.; IAHS Red Books: Wallingford, UK, 2006; pp. 1–5. [Google Scholar]
- Merz, R.; Blöschl, G. Regionalisation of catchment model parameters. J. Hydrol. 2004, 287, 95–123. [Google Scholar] [CrossRef]
- Blöschl, G.; Sivapalan, M. Scale issues in hydrological modelling: A review. Hydrol. Process. 1995, 9, 251–290. [Google Scholar] [CrossRef]
- Götzinger, J.; Bárdossy, A. Comparison of four regionalisation methods for a distributed hydrological model. J. Hydrol. 2007, 333, 374–384. [Google Scholar] [CrossRef]
- Kokkonen, T.S.; Jakeman, A.J.; Young, P.C.; Koivusalo, H.J. Predicting daily flows in ungauged catchments: Model regionalization from catchment descriptors at the Coweeta Hydrologic Laboratory, North Carolina. Hydrol. Process. 2003, 17, 2219–2238. [Google Scholar] [CrossRef]
- Parajka, J.; Merz, R.; Blöschl, G. A comparison of regionalisation methods for catchment model parameters. Hydrol. Earth Syst. Sci. 2005, 9, 157–171. [Google Scholar] [CrossRef]
- Valtanen, M.; Sillanpää, N.; Setälä, H. Effects of land use intensity on stormwater runoff and its temporal occurrence in cold climates. Hydrol. Process. 2014, 28, 2639–2650. [Google Scholar] [CrossRef]
- Valtanen, M.; Sillanpää, N.; Setälä, H. The effects of urbanization on runoff pollutant concentrations, loadings and their seasonal patterns under cold climate. Water. Air. Soil Pollut. 2014, 225, 1–16. [Google Scholar] [CrossRef]
- Krebs, G.; Kokkonen, T.; Valtanen, M.; Koivusalo, H.; Setälä, H. A high resolution application of a stormwater management model (SWMM) using genetic parameter optimization. Urban Water J. 2013, 10, 394–410. [Google Scholar] [CrossRef]
- Lahti Aqua OY Vesihuollon Yleiset Toimitusehdot. Available online: http://www.lahtiaqua.fi/Asiakaspalvelu/Lahti/Asiakkaalle/Hinnastot%20sek%C3%A4%20sopimus-%20ja%20toimitusehdot (accessed on 18 January 2016).
- Nash, J.E.; Sutcliffe, J.V. River flow forecasting through conceptual models part I-A discussion of principles. J. Hydrol. 1970, 10, 282–290. [Google Scholar] [CrossRef]
- Huong, H.T.L.; Pathirana, A. Urbanization and climate change impacts on future urban flooding in Can Tho city, Vietnam. Hydrol. Earth Syst. Sci. 2013, 17, 379–394. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, Y.; Gold, A.J.; August, P.V. Modeling watershed rainfall-runoff relations using impervious surface-area data with high spatial resolution. Hydrogeol. J. 2010, 18, 1413–1423. [Google Scholar] [CrossRef]
- Petrucci, G.; Bonhomme, C. The dilemma of spatial representation for urban hydrology semi-distributed modelling: Trade-offs among complexity, calibration and geographical data. J. Hydrol. 2014, 517, 997–1007. [Google Scholar] [CrossRef]
- Perrin, C.; Michel, C.; Andréassian, V. Does a large number of parameters enhance model performance? Comparative assessment of common catchment model structures on 429 catchments. J. Hydrol. 2001, 242, 275–301. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Surface Type | Surface Type CODE | Land-Use Type | 1 | 2 | 3 | Vesijärvi | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Area (ha) | Fraction (%) | Area (ha) | Fraction (%) | Area (ha) | Fraction (%) | Area (ha) | Fraction (%) | |||||||||
| HR | LR DEM | HR | LR DEM | HR | LR DEM | HR | LR DEM | HR | LR DEM | HR | LR DEM | |||||
| Asphalt | A | Other | - | - | - | - | - | - | - | - | - | 0.002 | - | 0.0 | 36.2 | 1.2 |
| Parking lot | 1.505 | 1.016 | 25.6 | 18.7 | 0.783 | 0.888 | 11.8 | 13.1 | 0.140 | 0.163 | 1.1 | 1.4 | 165.3 | 5.5 | ||
| Pavement | 0.846 | 1.048 | 14.4 | 19.3 | 0.412 | 0.493 | 6.2 | 7.3 | 0.053 | 0.064 | 0.4 | 0.6 | 83.9 | 2.8 | ||
| Street | 1.126 | 1.075 | 19.2 | 19.8 | 0.492 | 0.516 | 7.4 | 7.6 | 0.679 | 0.673 | 5.4 | 6.0 | 157.4 | 5.3 | ||
| Concrete | C | Other | - | 0.107 | - | 2.0 | - | 0.007 | - | 0.1 | - | - | - | - | 7.7 | 0.3 |
| Parking lot | - | 0.044 | - | 0.8 | - | 0.051 | - | 0.8 | - | - | - | - | 0.7 | 0.0 | ||
| Pavement | - | - | - | - | - | 0.114 | - | 1.7 | - | - | - | - | 3.9 | 0.1 | ||
| Street | - | - | - | - | - | 0.030 | - | 0.4 | - | - | - | - | 0.3 | 0.0 | ||
| Gravel | G | Other | 0.130 | 0.143 | 2.2 | 2.6 | 0.184 | 0.023 | 2.8 | 0.3 | - | - | - | - | 72.2 | 2.4 |
| Parking lot | 0.130 | 0.002 | 2.2 | 0.0 | 0.892 | 0.640 | 13.4 | 9.5 | 0.033 | 0.053 | 0.3 | 0.5 | 23.4 | 0.8 | ||
| Pavement | - | 0.004 | - | 0.1 | 0.002 | 0.049 | 0.0 | 0.7 | 0.010 | - | 0.1 | - | 37.8 | 1.3 | ||
| Railway | - | - | - | - | - | - | - | - | - | - | - | - | 7.4 | 0.2 | ||
| Street | - | - | - | - | 0.011 | 0.011 | 0.2 | 0.2 | - | - | - | - | 7.1 | 0.2 | ||
| Natural stone paver | NS | Other | - | - | - | - | - | 0.001 | - | 0.0 | - | - | - | - | 0.0 | 0.0 |
| Pavement | - | - | - | - | - | - | - | - | - | - | - | - | 0.0 | 0.0 | ||
| Cobble stone | CS | Other | 0.247 | 0.007 | 4.2 | 0.1 | 0.109 | 0.128 | 1.6 | 1.9 | 0.015 | - | 0.1 | - | 3.6 | 0.1 |
| Parking lot | - | - | - | - | 0.232 | 0.124 | 3.5 | 1.8 | 0.095 | 0.006 | 0.8 | 0.1 | 1.4 | 0.0 | ||
| Pavement | - | 0.021 | - | 0.4 | 0.131 | 0.017 | 2.0 | 0.2 | - | - | - | - | 0.3 | 0.0 | ||
| Street | - | - | - | - | 0.024 | - | 0.4 | - | - | - | - | - | 2.3 | 0.1 | ||
| Metal sheeting | MS | Roof | 1.149 | 1.474 | 19.6 | 27.2 | 1.275 | 1.406 | 19.2 | 20.8 | - | 0.915 | - | 8.1 | 203.0 | 6.8 |
| Sheeting | - | - | - | - | 0.020 | 0.2 | ||||||||||
| Tiles/Sheeting | TS | - | - | - | - | 1.342 | 10.7 | |||||||||
| Crop | CR | Green | - | - | - | - | - | - | - | - | - | - | - | - | 33.3 | 1.1 |
| Lawn | L | 0.383 | 0.099 | 6.5 | 1.8 | 0.325 | 0.005 | 4.9 | 0.1 | 0.500 | 0.015 | 4.0 | 0.1 | 75.2 | 2.5 | |
| Lawn/Vegetation | LV | - | 0.105 | - | 1.9 | 0.493 | 0.285 | 7.4 | 4.2 | 0.923 | 2.619 | 7.3 | 23.2 | 262.9 | 8.8 | |
| Peat | P | - | - | - | - | - | - | - | - | - | - | - | - | 3.0 | 0.1 | |
| Vegetation/Lawn | VL | - | 0.040 | - | 0.7 | 0.570 | 1.503 | 8.6 | 22.2 | 1.198 | 0.352 | 9.5 | 3.1 | 372.9 | 12.5 | |
| Vegetation | V | 0.358 | 0.241 | 6.1 | 4.4 | 0.697 | 0.467 | 10.5 | 6.9 | 0.200 | 0.028 | 1.6 | 0.3 | 234.1 | 7.9 | |
| Swamp | SW | - | - | - | - | - | - | - | - | - | - | - | - | 13.2 | 0.4 | |
| Rock | R | Rock | - | - | - | - | - | - | - | - | - | 0.266 | - | 2.4 | 64.4 | 2.2 |
| Forest | F | Forest | - | - | - | - | - | - | - | - | 7.381 | 6.137 | 58.6 | 54.3 | 1107.6 | 37.2 |
| Σ | 5.874 | 5.427 | 100 | 100 | 6.632 | 6.756 | 100 | 100 | 12.588 | 11.292 | 100 | 100 | 2980.6 | 100 | ||
| Drainage Type | Material | 1 Length (m) | 2 Length (m) | 3 Length (m) | Vesijärvi Length (m) | |||
|---|---|---|---|---|---|---|---|---|
| HR | LR-DEM | HR | LR-DEM | HR | LR-DEM | |||
| Conduit | Concrete | 762 | 611 | 835 | 624 | 1649 | 1041 | 101,805 |
| PVC | 1851 | 26 | 2397 | - | - | - | 13,957 | |
| Open channel | Natural | - | - | - | - | 74 | - | 28,620 |
| ∑ | 2613 | 637 | 3232 | 624 | 1723 | 1041 | 144,382 | |
| Surface Type | D (mm) | no (−) | I (%) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| V1 | V2 | V3 | VRef | V1 | V2 | V3 | VRef | V1 | V2 | V3 | VRef | |
| A | 0.39 | 0.42 | 0.62 | 1.91a | 0.011 | 0.011 | 0.013 | 0.007b | 100.0 | 88.5 | 100.0 | 100.0 |
| C | 0.39 | 0.42 | 0.62 | 1.91a | 0.011 | 0.011 | 0.013 | 0.007b | 100.0 | 88.5 | 100.0 | 100.0 |
| G | 2.54 | 2.49 | 2.54 | 1.91a | 0.020 | 0.030 | 0.024 | 0.021b | 0–50 | 33.4 | 69.5 | 0 |
| NS | 1.01 | 0.39 | 1.09 | 1.91a | 0.012 | 0.020 | 0.020 | 0.024a | 91 | 86.6 | 100.0 | 100.0 |
| CS | 1.01 | 0.39 | 1.09 | 1.91a | 0.012 | 0.020 | 0.020 | 0.024a | 91 | 86.6 | 100.0 | 100.0 |
| MS | 0.18 | 0.10 | 2.54 | 1.91a | 0.012 | 0.011 | 0.014 | 0.007ab | 100.0 | 100.0 | 100.0 | 100.0 |
| S | ||||||||||||
| TS | ||||||||||||
| CR | 4.18 | 4.13 | 7.53 | 7.62a | 0.300 | 0.667 | 0.790 | 0.600a | 0.0 | 0.0 | 0.0 | 0.0 |
| L | 4.98 | 4.82 | 5.07 | 3.81a | 0.150 | 0.168 | 0.200 | 0.150b | 0.0 | 0.0 | 0.0 | 0.0 |
| LV | 4.222 | 4.22 | 5.07 | 5.08a | 0.2382 | 0.238 | 0.300 | 0.375ab | 0.0 | 0.0 | 0.0 | 0.0 |
| P | 7.393 | 7.393 | 7.39 | 7.62a | 0.6683 | 0.6683 | 0.668 | 0.600a | 0.0 | 0.0 | 0.0 | 0.0 |
| VL | 3.592 | 3.59 | 2.54 | 5.08a | 0.3262 | 0.326 | 0.399 | 0.375a | 0.0 | 0.0 | 0.0 | 0.0 |
| V | 4.18 | 4.13 | 7.53 | 7.62a | 0.300 | 0.667 | 0.790 | 0.600a | 0.0 | 0.0 | 0.0 | 0.0 |
| SW | 50.00 | 50.00 | 50.00 | 50.00 | 0.500 | 0.500 | 0.500 | 0.500 | 0.0 | 0.0 | 0.0 | 0.0 |
| R | 7.393 | 7.393 | 7.39 | 7.62a | 0.6683 | 0.6683 | 0.668 | 0.600a | 100.0 | 100.0 | 100.0 | 100.0 |
| F | 7.393 | 7.393 | 7.39 | 7.62a | 0.6683 | 0.6683 | 0.668 | 0.600a | 0.0 | 0.0 | 0.0 | 0.0 |
| Drainage Type | Material | nc (−) | |||
|---|---|---|---|---|---|
| V1 | V2 | V3 | VRef | ||
| Conduit | Concrete | 0.011 | 0.015 | 0.015 | 0.013 |
| PVC | 0.011 | 0.011 | 0.0112 | 0.013 | |
| Open channel | Natural | 0.0493 | 0.0493 | 0.049 | 0.05 |
| Unit | 1 | 2 | 3 | ||||
|---|---|---|---|---|---|---|---|
| HR | LR-DEM | HR | LR-DEM | HR | LR-DEM | ||
| Area | (ha) | 5.87 | 5.43 | 6.63 | 6.76 | 12.59 | 11.58 |
| TIA | (ha) | 5.04 | 4.79 | 3.56 | 3.74 | 2.37 | 2.13 |
| EIA | (ha) | 5.03 | 4.79 | 3.23 | 3.74 | 0.93 | 1.23 |
| Overlapping surface | (%) | 100 | 80 | 100 | 97 | 100 | 89 |
| Excessive surface | (%) | 0 | 13 | 0 | 5 | 0 | 3 |
| Subcatchments | (−) | 690 | 317 | 784 | 426 | 821 | 413 |
| Drainage basins | (−) | 160 | 22 | 188 | 15 | 90 | 28 |
| Drainage network | (m) | 2613 | 637 | 3232 | 628 | 1722 | 1041 |
| Sequence | Resolution | Parameter Set | E (−) | ABS PFE (%) | VE (%) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 1 | 2 | 3 | 1 | 2 | 3 | |||
| CAL | HR | V1 | 0.88 | 0.93 | 0.71 | 12.4 | 17.1 | 29.2 | 7.0 | −1.8 | 26.8 |
| (4.1–20.4) | (4.0–37.3) | (6.4–51.5) | |||||||||
| V2 | 0.86 | 0.97 | 0.73 | 21.3 | 13.1 | 35.4 | 18.7 | 9.3 | 36.1 | ||
| (10.3–33.8) | (3.3–24.9) | (4.4–56.5) | |||||||||
| V3 | 0.81 | 0.91 | 0.80 | 24.6 | 25.8 | 35.7 | 14.6 | 4.0 | 32.2 | ||
| (2.5–53.9) | (0.7–53.1) | (20.9–53.3) | |||||||||
| VRef | 0.73 | 0.89 | 0.75 | 30.7 | 34.3 | 42.6 | 25.6 | 22.5 | 36.8 | ||
| (2.1–99.8) | (3.4–100.0) | (17.2–79.2) | |||||||||
| LR-DEM | V1 | 0.87 | 0.58 | 0.66 | 23.9 | 53.9 | 25.7 | 6.5 | −29.2 | 31.4 | |
| (5.9–86.7) | (19.2–77.8) | (7.9–36.3) | |||||||||
| V2 | 0.91 | 0.82 | 0.66 | 14.4 | 31.2 | 33.2 | 15.1 | −19.5 | 38.3 | ||
| (0.3–22.6) | (5.2–51.3) | (18.7–41.5) | |||||||||
| V3 | 0.87 | 0.74 | 0.70 | 23.5 | 37.9 | 26.5 | 18.1 | −18.4 | 32.2 | ||
| (2.2–54.6) | (24.0–49.4) | (9.0–36.3) | |||||||||
| VRef | 0.74 | 0.65 | 0.66 | 38.1 | 53.1 | 45.5 | 26.9 | 1.8 | 38.6 | ||
| (6.5–100.0) | (26.2–100.0) | (35.3–65.9) | |||||||||
| VAL-AP | HR | V1 | 0.85 | 0.93 | 0.64 | 8.1 | 10.5 | 3.8 | 6.5 | 8.9 | 5.0 |
| (0.0–27.6) | (1.1–30.1) | - | |||||||||
| V2 | 0.83 | 0.94 | 0.67 | 17.8 | 16.1 | 16.7 | 18.2 | 17.8 | 13.7 | ||
| (12.3–27.5) | (7.0–38.4) | ||||||||||
| V3 | 0.81 | 0.91 | 0.66 | 26.6 | 22.6 | 29.0 | 13.3 | 12.7 | 16.1 | ||
| (11.8–42.0) | (1.7–43.0) | - | |||||||||
| VRef | 0.81 | 0.84 | 0.64 | 21.9 | 24.9 | 27.1 | 21.0 | 29.5 | 23.3 | ||
| (4.7–46.5) | (9.6–39.2) | - | |||||||||
| LR-DEM | V1 | 0.81 | 0.79 | 0.40 | 26.0 | 37.3 | 12.2 | 4.5 | −12.3 | 26.1 | |
| (7.2–65.8) | (11.2–64.4) | - | |||||||||
| V2 | 0.86 | 0.90 | 0.54 | 10.6 | 18.5 | 8.6 | 14.5 | −1.0 | 34.2 | ||
| (4.2–22.7) | (2.8–40.1) | - | |||||||||
| V3 | 0.85 | 0.92 | 0.56 | 19.3 | 12.9 | 2.1 | 14.2 | −1.6 | 27.9 | ||
| (0.4–44.7) | (2.6–21.1) | - | |||||||||
| VRef | 0.76 | 0.85 | 0.52 | 26.6 | 12.6 | 0.3 | 20.2 | 12.5 | 37.5 | ||
| (4.6–49.4) | (1.7–22.2) | - | |||||||||
| VAL-LSB | HR | V1 | 0.84 | 0.59 | 0.78 | 13.7 | 16.2 | 26.3 | 3.7 | −1.0 | 11.4 |
| (0.3–26.5) | (4.7–23.3) | (1.2–69.4) | |||||||||
| V2 | 0.82 | 0.61 | 0.80 | 30.1 | 21.9 | 37.0 | 16.3 | 9.7 | 24.0 | ||
| (18.7–38.0) | (2.9–34.6) | (2.7–75.2) | |||||||||
| V3 | 0.80 | 0.54 | 0.81 | 26.8 | 15.8 | 33.8 | 11.4 | 0.5 | 19.9 | ||
| (18.0–36.1) | (5.7–23.2) | (2.6–71.4) | |||||||||
| VRef | 0.78 | 0.60 | 0.78 | 20.6 | 21.4 | 33.0 | 18.3 | 17.1 | 31.5 | ||
| (7.8–34.0) | (6.7–28.9) | (0.1–70.9) | |||||||||
| LR-DEM | V1 | 0.83 | 0.45 | 0.65 | 25.3 | 8.3 | 33.0 | 1.4 | −24.6 | 16.4 | |
| (0.6–46.9) | (0.2–20.6) | (11.1–96.4) | |||||||||
| V2 | 0.87 | 0.53 | 0.72 | 17.1 | 12.8 | 35.4 | 10.8 | −14.9 | 25.4 | ||
| (2.5–32.2) | (11.5–13.8) | (10.5–67.3) | |||||||||
| V3 | 0.86 | 0.43 | 0.75 | 15.9 | 7.9 | 27.6 | 10.8 | −19.9 | 19.0 | ||
| (2.9–35.8) | (1.0–21.2) | (1.8–64.4) | |||||||||
| VRef | 0.79 | 0.49 | 0.73 | 22.6 | 10.9 | 28.3 | 16.7 | −3.4 | 33.8 | ||
| (4.6–32.4) | (6.1–15.0) | (0.9–64.2) | |||||||||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krebs, G.; Kokkonen, T.; Setälä, H.; Koivusalo, H. Parameterization of a Hydrological Model for a Large, Ungauged Urban Catchment. Water 2016, 8, 443. https://doi.org/10.3390/w8100443
Krebs G, Kokkonen T, Setälä H, Koivusalo H. Parameterization of a Hydrological Model for a Large, Ungauged Urban Catchment. Water. 2016; 8(10):443. https://doi.org/10.3390/w8100443
Chicago/Turabian StyleKrebs, Gerald, Teemu Kokkonen, Heikki Setälä, and Harri Koivusalo. 2016. "Parameterization of a Hydrological Model for a Large, Ungauged Urban Catchment" Water 8, no. 10: 443. https://doi.org/10.3390/w8100443