
Lie Symmetries, Closed-Form Solutions, and Various Dynamical Profiles of Solitons for the Variable Coefficient (2+1)-Dimensional KP Equations

 , and
, and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Lie Symmetries
2.1. Lie Symmetry Analysis for First VCKP Equation
2.2. Lie Symmetry Analysis for Second Variable Coefficient KP Equation
3. Exact Invariant Solutions
3.1. Exact Solutions to the First VCKP Equation
3.1.1. Vector Field
3.1.2. Vector Field
3.1.3. Vector Field
3.1.4. Vector Field
3.1.5. Vector Field
3.1.6. Vector Field
3.2. Exact Solutions to the Second VCKP Equation
3.2.1. Vector Field
3.2.2. Vector Field
3.2.3. Vector Field
3.2.4. Vector Field
3.2.5. Vector Field
3.2.6. Vector Field
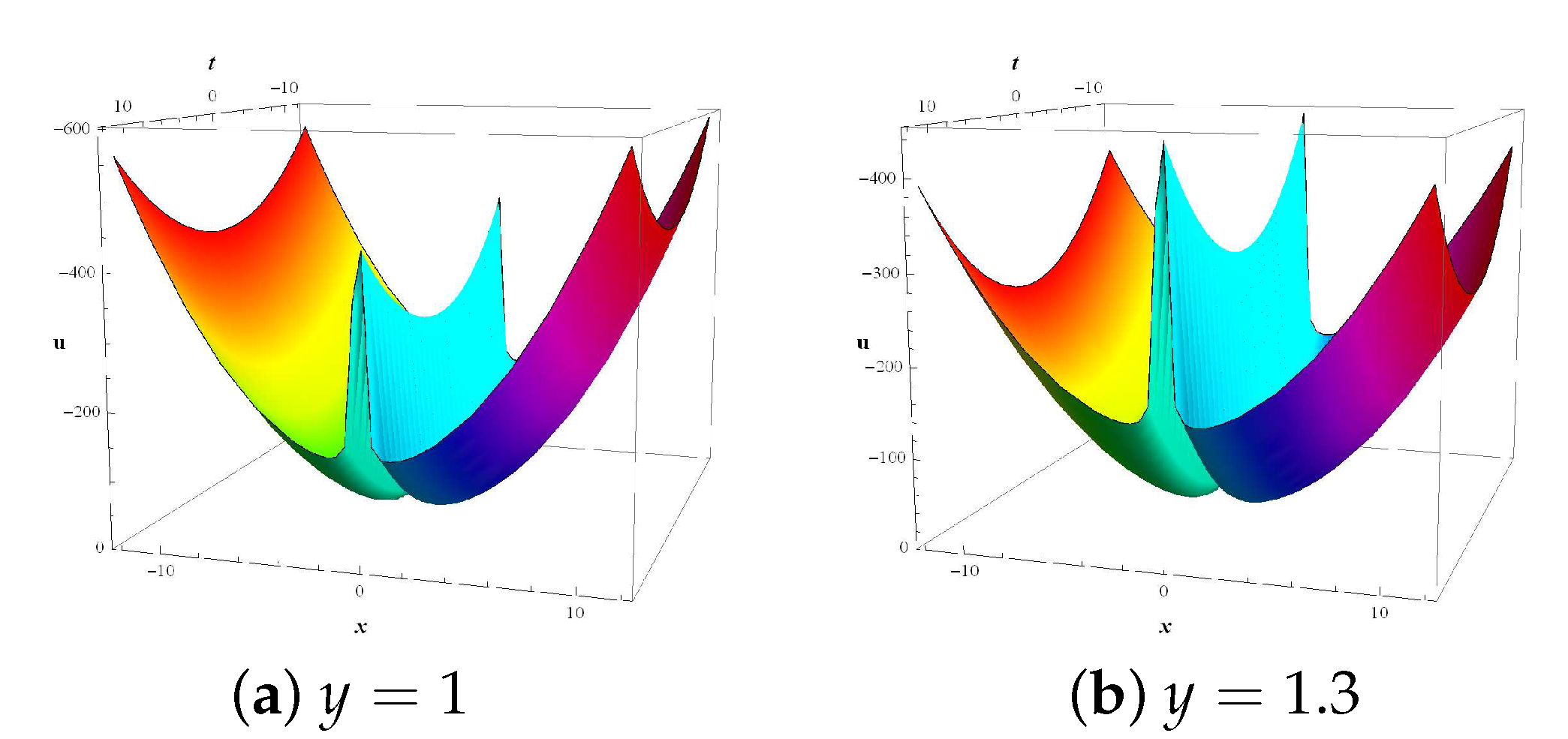
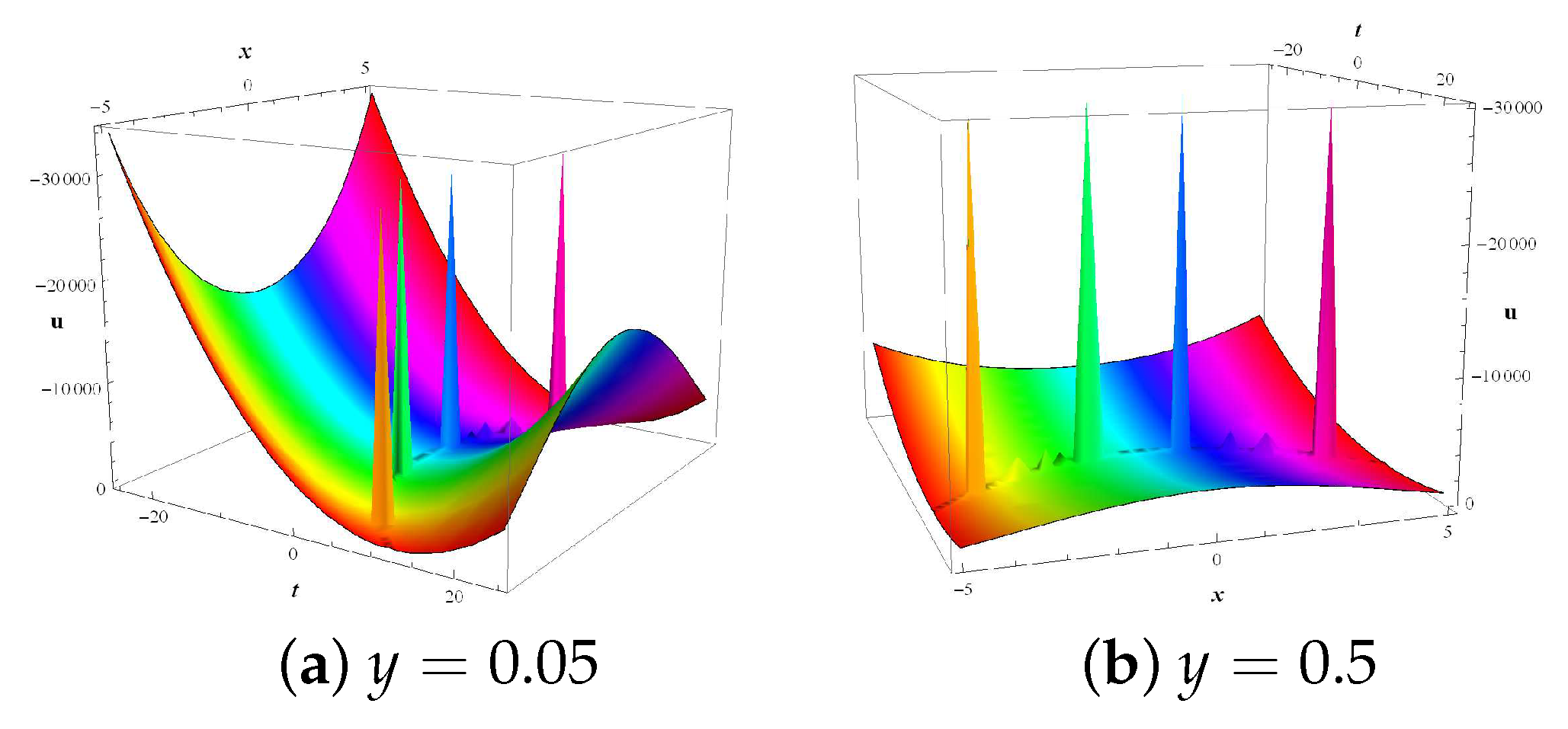
4. Graphical Illustrations for Soliton Solutions
5. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Guan, X.; Liu, W.; Zhou, Q.; Biswas, A. Darboux transformation and analytic solutions for a generalized super-NLS-mKdV equation. Nonlinear Dyn. 2019, 98, 1491–1500. [Google Scholar] [CrossRef]
- Constantin, A.; Ivanov, R.I.; Lenells, J. Inverse scattering transform for the DegasperisProcesi equation. Nonlinearity 2010, 23, 2559. [Google Scholar] [CrossRef] [Green Version]
- Kumar, S.; Mohan, B. A study of multi-soliton solutions, breather, lumps, and their interactions for kadomtsev–Petviashvili equation with variable time coeffcient using hirota method. Phys. Scr. 2021, 96, 125255. [Google Scholar] [CrossRef]
- Ma, W.X.; Fan, E. Linear superposition principle applying to Hirota bilinear equations. Comput. Math. Appl. 2011, 61, 950–959. [Google Scholar] [CrossRef] [Green Version]
- Kudryashov, N.A. Simplest equation method to look for exact solutions of nonlinear differential equations. Chaos Solitons Fract. 2005, 24, 1217–1231. [Google Scholar] [CrossRef] [Green Version]
- Shen, Y.J.; Gao, Y.T.; Yu, X.; Meng, G.Q.; Qin, Y. Bell-polynomial approach applied to the seventh-order Sawada-Kotera-Ito equation. Appl. Math. Comput. 2014, 227, 502–508. [Google Scholar] [CrossRef]
- Zayed, E.M.; Shohib, R.M. Optical solitons and other solutions to Biswas-Arshed equation using the extended simplest equation method. Optik 2019, 185, 626–635. [Google Scholar] [CrossRef]
- Ebaid, A.; Aly, E.H. Exact solutions for the transformed reduced Ostrovsky equation via the F-expansion method in terms of Weierstrass-elliptic and Jacobian-elliptic functions. Wave Motion 2012, 49, 296–308. [Google Scholar] [CrossRef]
- Lou, S.Y.; Hu, X.; Chen, Y. Nonlocal symmetries related to Bäcklund transformation and their applications. J. Phys. A Math. 2012, 45, 155209. [Google Scholar] [CrossRef] [Green Version]
- Nisar, K.S.; Ilhan, O.A.; Abdulazeez, S.T.; Manafian, J.; Mohammed, S.A.; Osman, M.S. Novel multiple soliton solutions for some nonlinear PDEs via multiple Exp-function method. Result Phys. 2021, 21, 103769. [Google Scholar] [CrossRef]
- Ali, K.K.; Wazwaz, A.M.; Osman, M.S. Optical soliton solutions to the generalized nonautonomous nonlinear Schrödinger equations in optical fibers via the sine-Gordon expansion method. Optik 2020, 208, 164132. [Google Scholar] [CrossRef]
- Sulaiman, T.A.; Yusuf, A.; Abdel-Khalek, S.; Bayram, M.; Ahmad, H. Nonautonomous complex wave solutions to the (2+1)-dimensional variable-coefficients nonlinear Chiral Schrödinger equation. Result Phys. 2020, 19, 103604. [Google Scholar] [CrossRef]
- Niwas, M.; Kumar, S.; Kharbanda, H. Symmetry analysis, closed-form invariant solutions and dynamical wave structures of the generalized (3+1)-dimensional breaking soliton equation using optimal system of Lie subalgebra. J. Ocean Eng. Sci. 2021. [Google Scholar] [CrossRef]
- Wazwaz, A.M. Two new integrable Kadomtsev–Petviashvili equations with time-dependent coefficients: Multiple real and complex soliton solutions. Waves Random Complex Media 2020, 30, 776–786. [Google Scholar] [CrossRef]
- Tian, S.F.; Zhang, H.Q. On the integrability of a generalized variable-coefficient forced Korteweg-de Vries equation in fluids. Stud. Appl. Math. 2014, 132, 212–246. [Google Scholar] [CrossRef]
- Chen, S.; Zhou, Y.; Baronio, F.; Mihalache, D. Special types of elastic resonant soliton solutions of the Kadomtsev–Petviashvili II equation. Rom. Rep. Phys. 2018, 70, 102–118. [Google Scholar]
- Kadomtsev, B.B.; Petviashvili, V.I. On the stability of solitary waves in weakly dispersive media. Sov. Phys. Dokl. 1970, 15, 539–541. [Google Scholar]
- Hereman, W.; Nuseir, A. Symbolic methods to construct exact solutions of nonlinear partial differential equations. Math. Comput. Simul. 1997, 43, 13–27. [Google Scholar] [CrossRef]
- Liu, J.G.; Zhu, W.H. Multiple rogue wave, breather wave and interaction solutions of a generalized (3+1)-dimensional variable-coefficient nonlinear wave equation. Nonlinear Dyn. 2021, 103, 1841–1850. [Google Scholar] [CrossRef]
- Baldwin, D.E.; Hereman, W. A symbolic algorithm for computing recursion operators of nonlinear partial differential equations. Int. J. Comput. Math. 2010, 87, 1094–1119. [Google Scholar] [CrossRef] [Green Version]
- Clarkson, P.A.; Winternitz, P. Nonclassical symmetry reductions for the Kadomtsev–Petviashvili equation. Physica D 1991, 49, 257–272. [Google Scholar] [CrossRef]
- Kumar, M.; Tanwar, D.V.; Kumar, R. On Lie symmetries and soliton solutions of (2+1)-dimensional Bogoyavlenskii equations. Nonlinear Dyn. 2018, 94, 2547–2561. [Google Scholar] [CrossRef]
- Kassem, M.M.; Rashed, A.S. N-solitons and cuspon waves solutions of (2+1)-dimensional Broer-Kaup-Kupershmidt equations via hidden symmetries of Lie optimal system. Chin. J. Phys. 2018, 57, 90–104. [Google Scholar] [CrossRef]
- Tanwar, D.V. Optimal system, symmetry reductions and group-invariant solutions of (2+1)-dimensional ZK-BBM equation. Phys. Scr. 2021, 96, 065215. [Google Scholar] [CrossRef]
- Laouini, G.; Amin, A.M.; Moustafa, M. Lie Group Method for Solving the Negative-Order Kadomtsev-Petviashvili Equation (nKP). Symmetry 2021, 13, 224. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, S.; Dhiman, S.K.; Baleanu, D.; Osman, M.S.; Wazwaz, A.-M. Lie Symmetries, Closed-Form Solutions, and Various Dynamical Profiles of Solitons for the Variable Coefficient (2+1)-Dimensional KP Equations. Symmetry 2022, 14, 597. https://doi.org/10.3390/sym14030597
Kumar S, Dhiman SK, Baleanu D, Osman MS, Wazwaz A-M. Lie Symmetries, Closed-Form Solutions, and Various Dynamical Profiles of Solitons for the Variable Coefficient (2+1)-Dimensional KP Equations. Symmetry. 2022; 14(3):597. https://doi.org/10.3390/sym14030597
Chicago/Turabian StyleKumar, Sachin, Shubham K. Dhiman, Dumitru Baleanu, Mohamed S. Osman, and Abdul-Majid Wazwaz. 2022. "Lie Symmetries, Closed-Form Solutions, and Various Dynamical Profiles of Solitons for the Variable Coefficient (2+1)-Dimensional KP Equations" Symmetry 14, no. 3: 597. https://doi.org/10.3390/sym14030597