
Dielectric Elastomer Generator for Electromechanical Energy Conversion: A Mini Review

 ,
,
Abstract
:1. Introduction
2. Dielectric Elastomer Generator
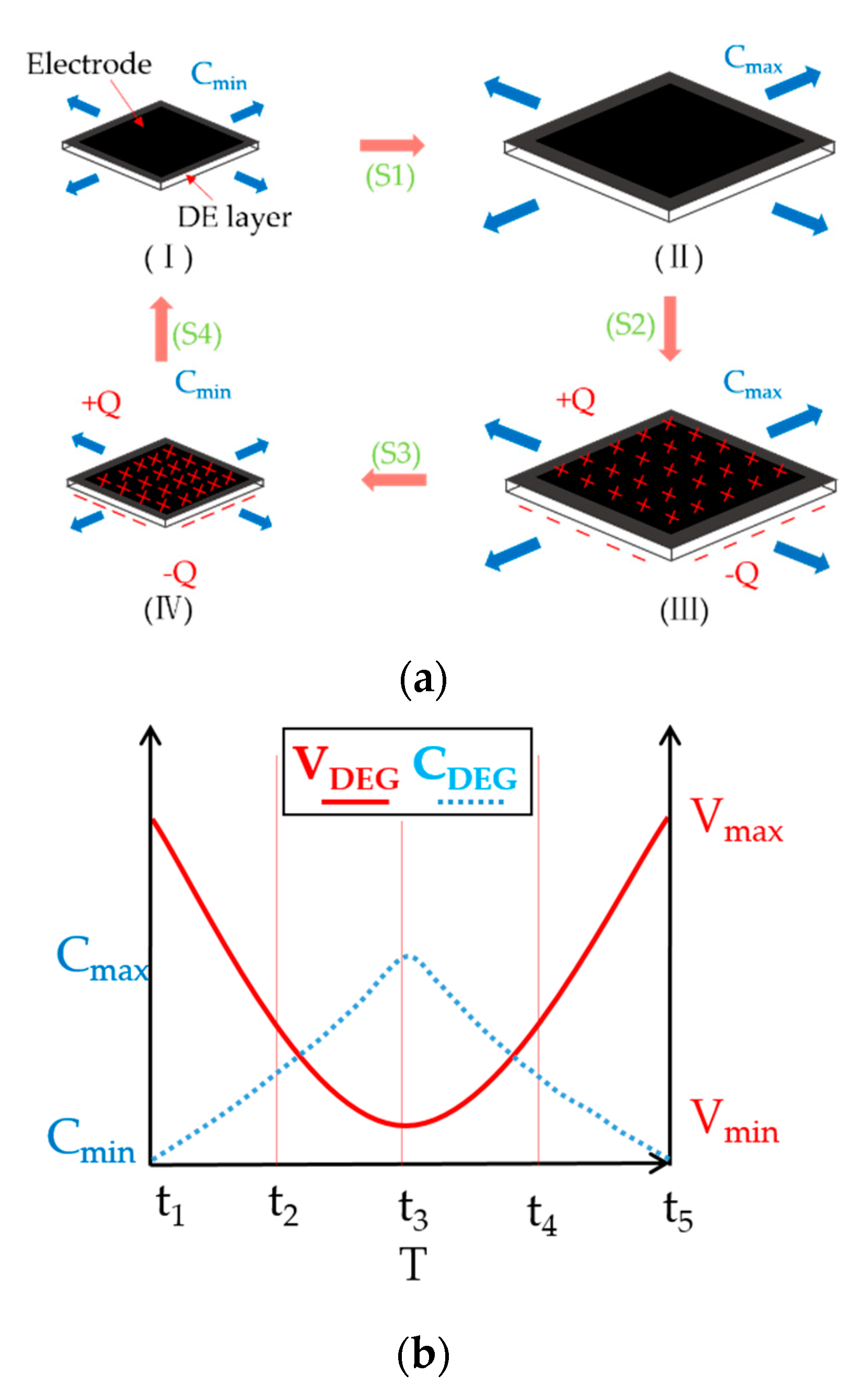
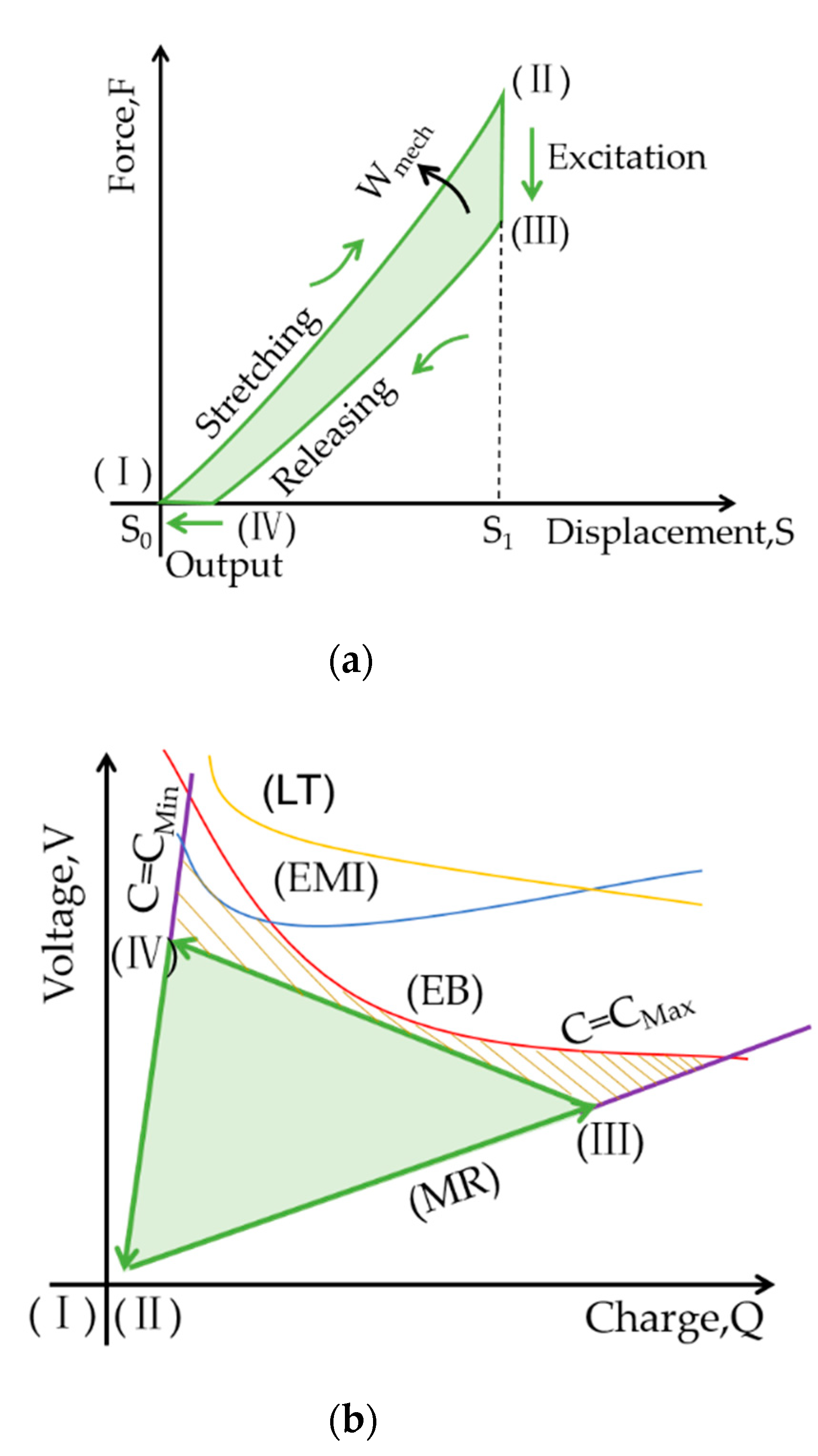
2.1. Energy Conversion Principle
2.2. Output Performance
2.3. Materials
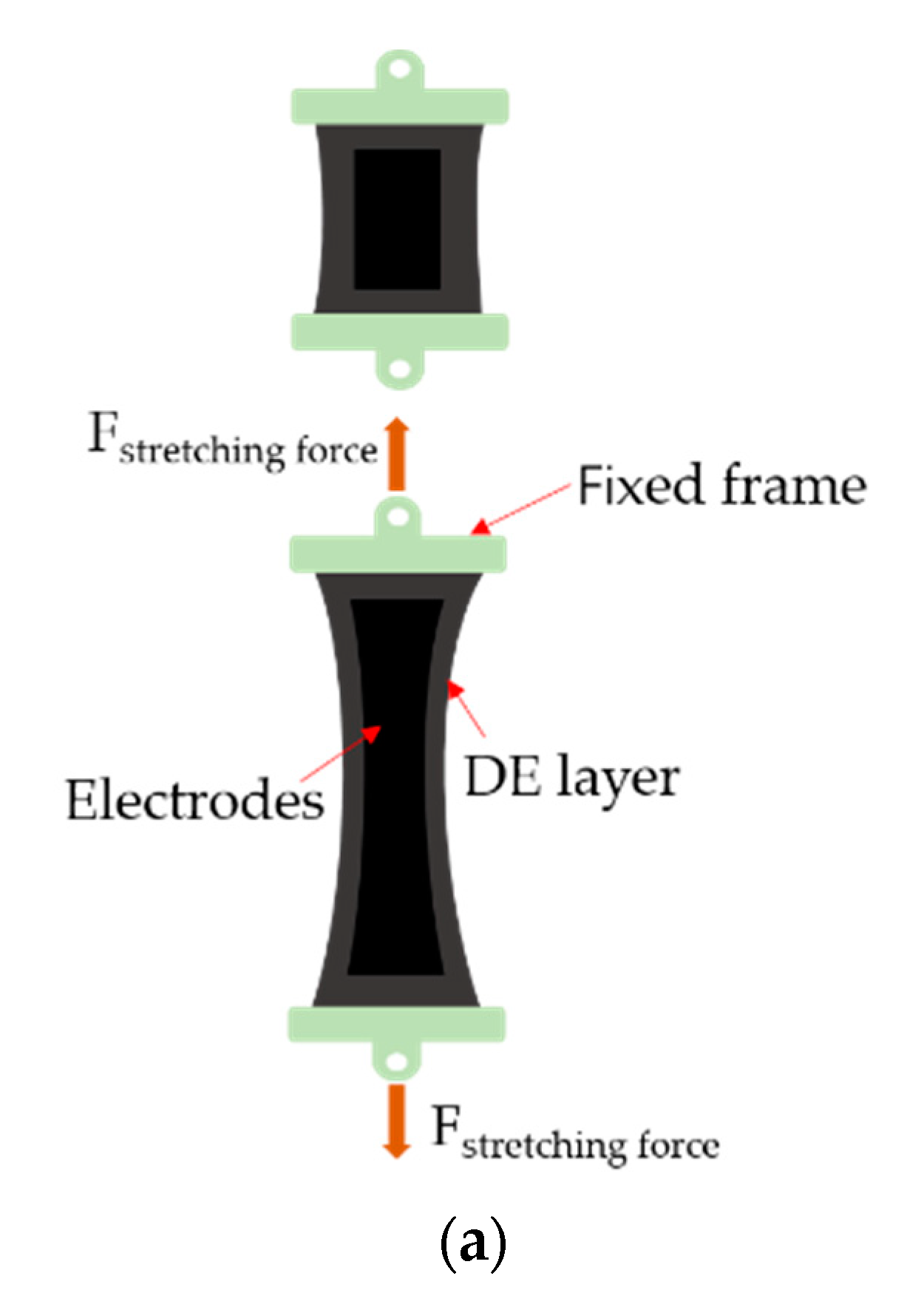
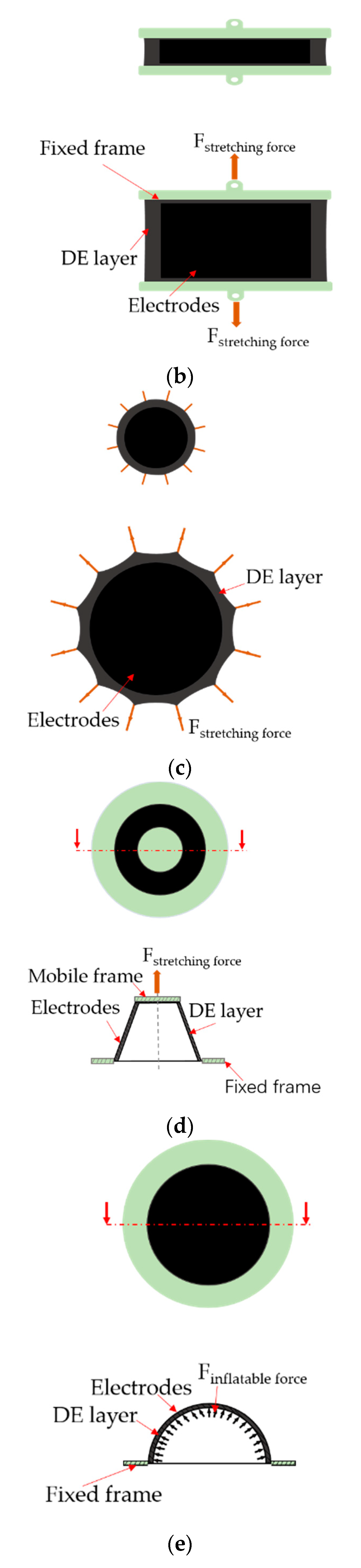
2.4. Deformation Modes
3. Dielectric Elastomer Generator for Energy Harvesting
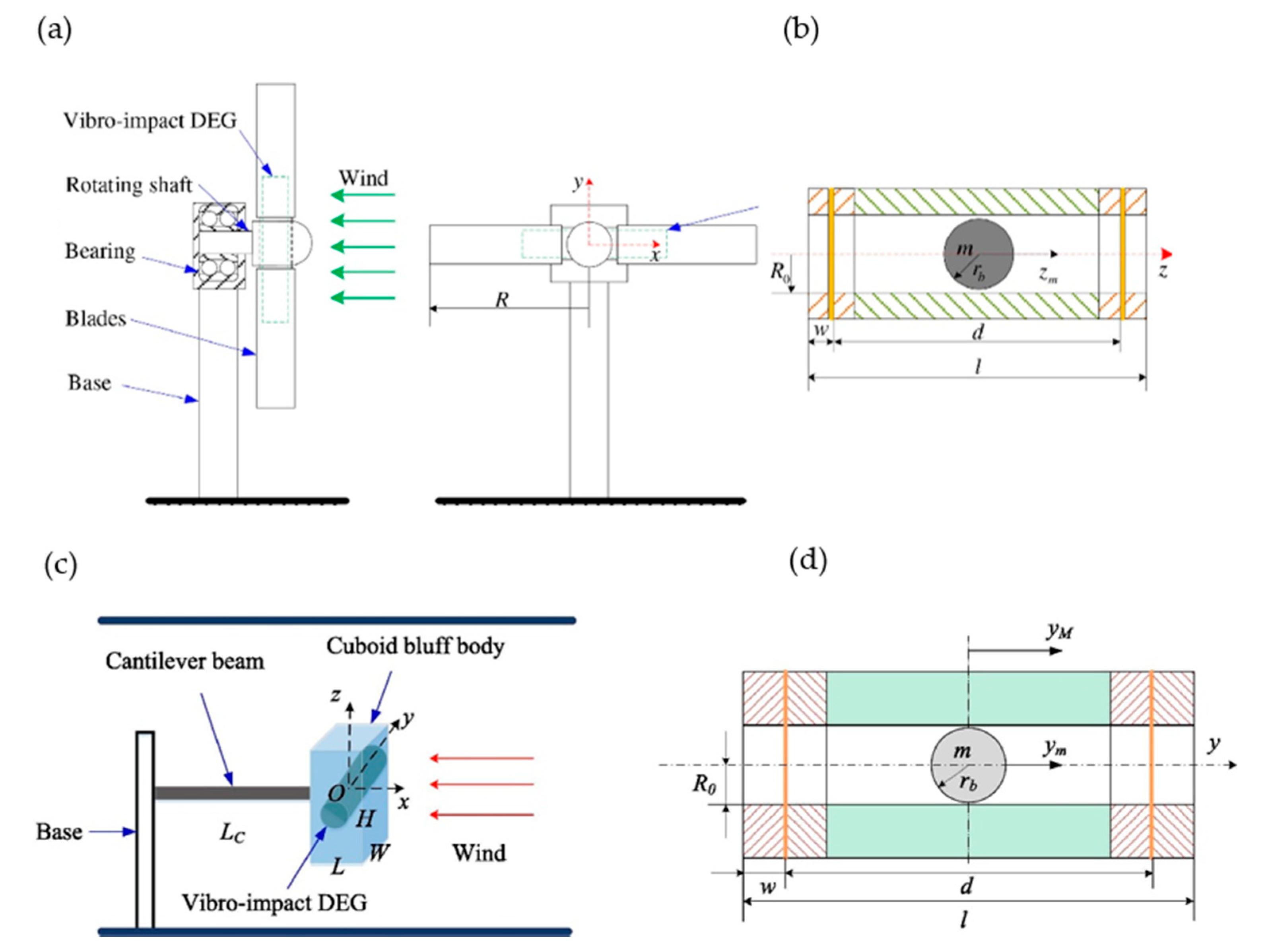
3.1. Wind Energy
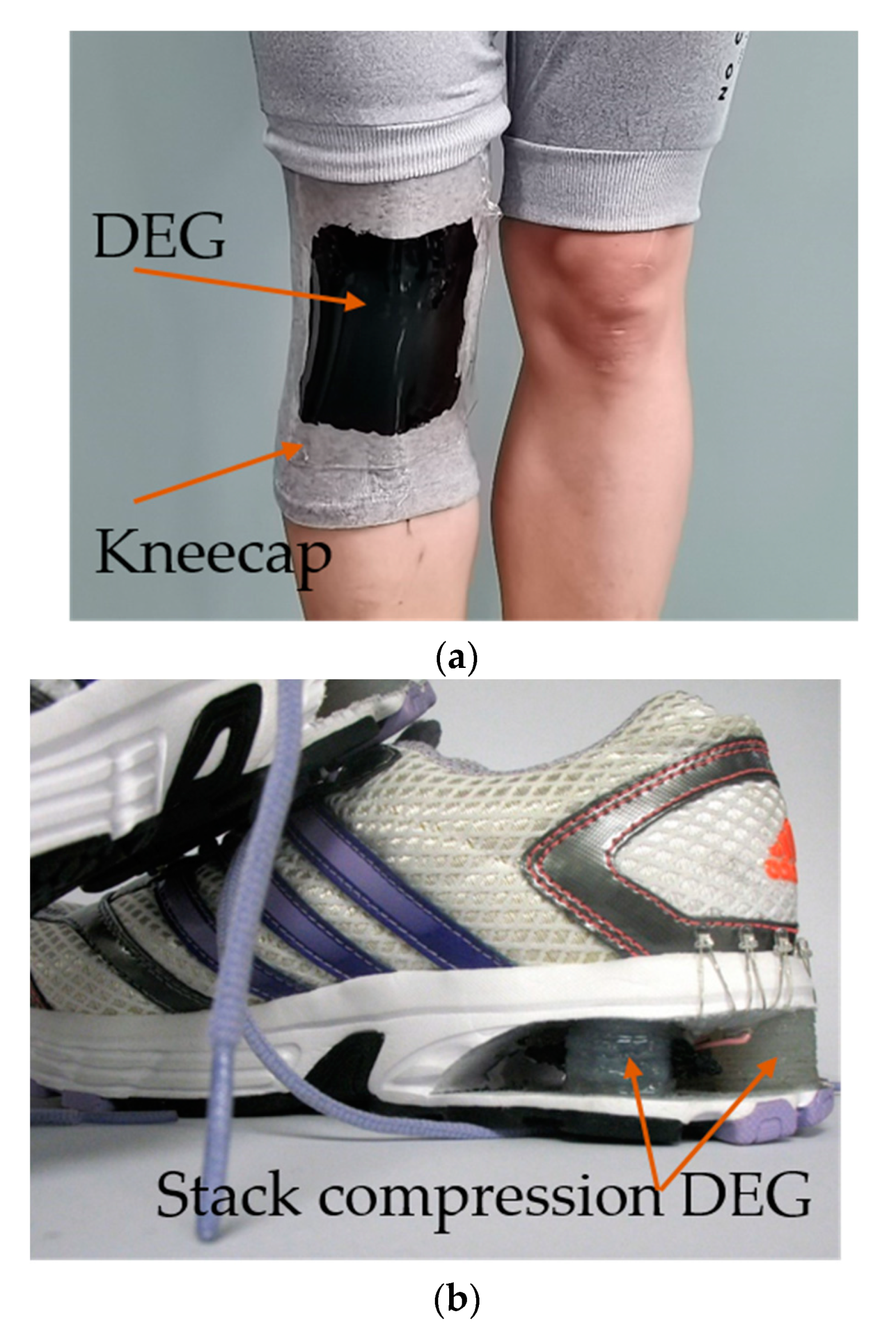
3.2. Human Motion Energy
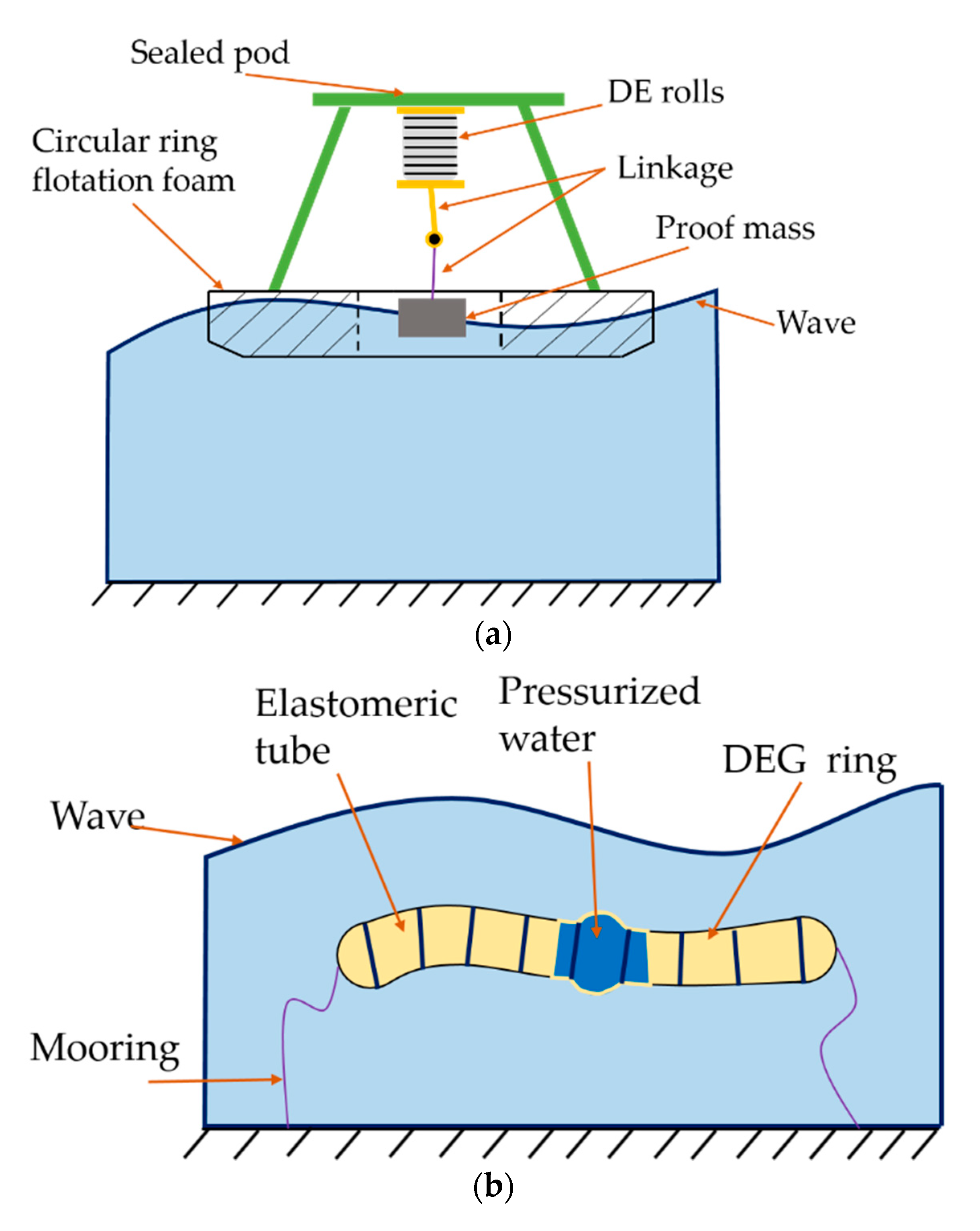
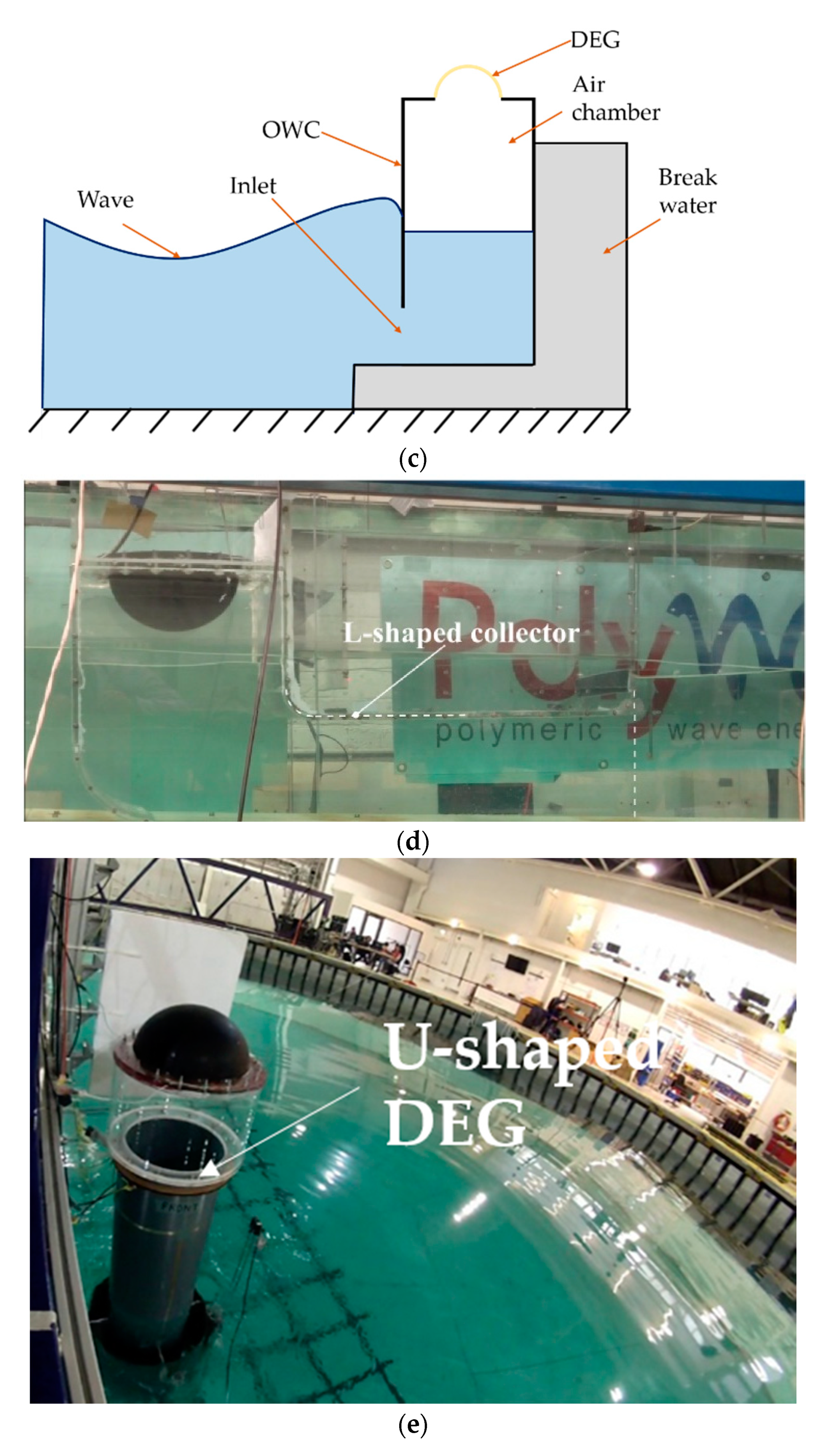
3.3. Wave Energy
4. Conclusions and Perspective
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fan, K.; Zhang, Y.; Liu, H.; Cai, M.; Tan, Q. A nonlinear two-degree-of-freedom electromagnetic energy harvester for ultra-low frequency vibrations and human body motions. Renew. Energy 2019, 138, 292–302. [Google Scholar] [CrossRef]
- Fan, F.-R.; Tian, Z.-Q.; Lin Wang, Z. Flexible triboelectric generator. Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Toprak, A.; Tigli, O. Piezoelectric energy harvesting: State-of-the-art and challenges. Appl. Phys. Rev. 2014, 1, 031104. [Google Scholar] [CrossRef]
- Krupenkin, T.; Taylor, J.A. Reverse electrowetting as a new approach to high-power energy harvesting. Nat. Commun. 2011, 2, 448. [Google Scholar] [CrossRef] [Green Version]
- Cottinet, P.J.; Guyomar, D.; Guiffard, B.; Putson, C.; Lebrun, L. Modeling and Experimentation on an Electrostrictive Polymer Composite for Energy Harvesting. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2010, 57, 774–784. [Google Scholar] [CrossRef]
- Pelrine, R.; Kornbluh, R.; Pei, Q.; Joseph, J.J.S. High-Speed Electrically Actuated Elastomers with Strain Greater Than 100%. Science 2000, 287, 836–839. [Google Scholar] [CrossRef] [PubMed]
- Sadik, O.A.; Ngundi, M.; Wanekaya, A. Chemical Biological Sensors Based on Advances in Conducting Electroactive Polymers. Microchim. Acta 2003, 143, 187–194. [Google Scholar] [CrossRef]
- Peirine, R.; Kornbluh, R.; Eckerle, J.; Jeuck, P.; Oh, S.; Pe, Q.; Stanford, S. Dielectric elastomers: Generator mode fundamentals and applications. In Proceedings of the SPIE’s 8th Annual International Symposium on Smart Structures and Materials, Newport Beach, CA, USA, 16 July 2001; pp. 148–156. [Google Scholar]
- Koh, S.J.A.; Keplinger, C.; Li, T.; Bauer, S.; Suo, Z. Dielectric Elastomer Generators: How Much Energy Can Be Converted? IEEE/ASME Trans. Mechatron. 2011, 16, 33–41. [Google Scholar] [CrossRef]
- Shian, S.; Huang, J.; Zhu, S.; Clarke, D.R. Optimizing the electrical energy conversion cycle of dielectric elastomer generators. Adv. Mater. 2014, 26, 6617–6621. [Google Scholar] [CrossRef]
- Wax, S.G.; Sands, R.R. Electroactive polymer actuators and devices. In Proceedings of the 1999 Symposium on Smart Structures and Materials, SPIE, Newport Beach, CA, USA, 28 May 1999; pp. 2–10. [Google Scholar]
- Paradiso, J.A.; Starner, T.J.I.P.C. Energy scavenging for mobile and wireless electronics. IEEE Pervasive Comput. 2005, 4, 18–27. [Google Scholar] [CrossRef]
- Chiba, S.; Waki, M.; Masuda, K.; Ikoma, T. Current status and future prospects of electric generators using electroactive polymer artificial muscle. In Proceedings of the OCEANS’10 IEEE SYDNEY, Sydney, Australia, 24–27 May 2010. [Google Scholar]
- Kornbluh, R.D.; Pelrine, R.; Prahlad, H.; Wong-Foy, A.; McCoy, B.; Kim, S.; Eckerle, J.; Brochu, P.; Anderson, P.I. Electroactivity in Polymeric Materials; Springer: New York, NY, USA, 2012; pp. 67–93. [Google Scholar]
- Zhang, J.W.; Lai, Z.H.; Rao, X.X.; Zhang, C.L. Harvest rotational energy from a novel dielectric elastomer generator with crank-connecting rod mechanisms. Smart Mater. Struct. 2020, 29, 065005. [Google Scholar] [CrossRef]
- Brochu, P.; Stoyanov, H.; Chang, R.; Niu, X.; Hu, W.; Pei, Q. Capacitive Energy Harvesting Using Highly Stretchable Silicone-Carbon Nanotube Composite Electrodes. Adv. Energy Mater. 2014, 4, 1300659. [Google Scholar] [CrossRef]
- Graf, C.; Maas, J.; Schapeler, D. Energy harvesting cycles based on electro active polymers. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 9 April 2010; p. 764217. [Google Scholar]
- Binh, P.C.; Nam, D.N.C.; Ahn, K.K. Modeling and experimental analysis of an antagonistic energy conversion using dielectric electro-active polymers. Mechatronics 2014, 24, 1166–1177. [Google Scholar] [CrossRef]
- Illenberger, P.; Takagi, K.; Kojima, H.; Madawala, U.K.; Anderson, I.A. A Mathematical Model for Self-Priming Circuits: Getting the Most From a Dielectric Elastomer Generator. IEEE Trans. Power Electron. 2017, 32, 6904–6912. [Google Scholar] [CrossRef]
- Huang, J.; Shian, S.; Suo, Z.; Clarke, D.R. Dielectric elastomer generator with equi-biaxial mechanical loading for energy harvesting. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 9 April 2013; p. 86870Q. [Google Scholar]
- Fan, P.; Chen, H. Performance investigation of a dissipative dielectric elastomer generator by the damping model. Appl. Phys. A 2018, 124, 148–158. [Google Scholar] [CrossRef]
- Zhou, J.Y.; Jiang, L.Y.; Khayat, R. Analysis on the energy harvesting cycle of dielectric elastomer generators for performance improvement. Europhys. Lett. 2016, 115, 27003. [Google Scholar] [CrossRef]
- McKay, T.G.; O’Brien, B.M.; Calius, E.P.; Anderson, I.A. Soft generators using dielectric elastomers. Appl. Phys. Lett. 2011, 98, 142903. [Google Scholar] [CrossRef]
- Wang, H.; Wang, C.; Yuan, T. On the energy conversion and efficiency of a dielectric electroactive polymer generator. Appl. Phys. Lett. 2012, 101, 33904. [Google Scholar] [CrossRef]
- Huang, J.S.; Shian, S.; Suo, Z.G.; Clarke, D.R. Maximizing the Energy Density of Dielectric Elastomer Generators Using Equi-Biaxial Loading. Adv. Funct. Mater. 2013, 23, 5056–5061. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Zhang, Z.; Liu, Y.; Leng, J. Failure modeling of folded dielectric elastomer actuator. Sci. China Phys. Mech. Astron. 2013, 57, 263–272. [Google Scholar] [CrossRef]
- Khajehsaeid, H.; Baghshomal Azar, H. Influence of stretch and temperature on the energy density of dielectric elastomer generators. Appl. Math. Mech. 2019, 40, 1547–1560. [Google Scholar] [CrossRef]
- Plante, J.-S.; Dubowsky, S. Large-scale failure modes of dielectric elastomer actuators. Int. J. Solids Struct. 2006, 43, 7727–7751. [Google Scholar] [CrossRef] [Green Version]
- Koh, S.J.A.; Zhao, X.; Suo, Z. Maximal energy that can be converted by a dielectric elastomer generator. Appl. Phys. Lett. 2009, 94, 262902. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.; Liu, S.; Zhong, M.; Zhang, L.; Ning, N.; Tian, M. Optimizing energy harvesting performance of cone dielectric elastomer generator based on VHB elastomer. Nano Energy 2020, 71, 104606. [Google Scholar] [CrossRef]
- Chiang Foo, C.; Cai, S.; Jin Adrian Koh, S.; Bauer, S.; Suo, Z. Model of dissipative dielectric elastomers. J. Appl. Phys. 2012, 111, 034102. [Google Scholar] [CrossRef]
- Li, Y.; Zhou, J.; Jiang, L. The effect of nonlinear material viscosity on the energy harvesting performance of dielectric elastomer generators. J. Intell. Mater. Syst. Struct. 2020, 31, 1029–1038. [Google Scholar] [CrossRef]
- Fan, P.; Chen, H. Optimizing the Energy Harvesting Cycle of a Dissipative Dielectric Elastomer Generator for Performance Improvement. Polymers 2018, 10, 1341. [Google Scholar] [CrossRef] [Green Version]
- Chu, B.; Zhou, X.; Ren, K.; Neese, B.; Lin, M.; Wang, Q.; Bauer, F.; Zhang, Q.M. A dielectric polymer with high electric energy density and fast discharge speed. Science 2006, 313, 334–336. [Google Scholar] [CrossRef]
- Zhang, J.; Sheng, J.; Liu, X.; Liu, L.; Zhao, J.; Chen, H. Temperature effect on electromechanical properties of polyacrylic dielectric elastomer: An experimental study. Smart Mater. Struct. 2020, 29, 047002. [Google Scholar] [CrossRef]
- Brochu, P.; Pei, Q. Advances in dielectric elastomers for actuators and artificial muscles. Macromol. Rapid Commun. 2010, 31, 10–36. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Agostini, L.; Moretti, G.; Fontana, M.; Vertechy, R. Dielectric elastomer materials for large-strain actuation and energy harvesting: A comparison between styrenic rubber, natural rubber and acrylic elastomer. Smart Mater. Struct. 2019, 28, 114001. [Google Scholar] [CrossRef]
- Madsen, F.B.; Yu, L.; Mazurek, P.; Skov, A.L. A simple method for reducing inevitable dielectric loss in high-permittivity dielectric elastomers. Smart Mater. Struct. 2016, 25, 075018. [Google Scholar] [CrossRef] [Green Version]
- Moretti, G.; Rosset, S.; Vertechy, R.; Anderson, I.; Fontana, M. A Review of Dielectric Elastomer Generator Systems. Adv. Intell. Syst. 2020, 2, 2000125. [Google Scholar] [CrossRef]
- Michel, S.; Zhang, X.Q.; Wissler, M.; Löwe, C.; Kovacs, G. A comparison between silicone and acrylic elastomers as dielectric materials in electroactive polymer actuators. Polym. Int. 2009, 59, 391–399. [Google Scholar] [CrossRef]
- Kaltseis, R.; Keplinger, C.; Adrian Koh, S.J.; Baumgartner, R.; Goh, Y.F.; Ng, W.H.; Kogler, A.; Tröls, A.; Foo, C.C.; Suo, Z.; et al. Natural rubber for sustainable high-power electrical energy generation. RSC Adv. 2014, 4, 27905–27913. [Google Scholar] [CrossRef] [Green Version]
- Tröls, A.; Kogler, A.; Baumgartner, R.; Kaltseis, R.; Keplinger, C.; Schwödiauer, R.; Graz, I.; Bauer, S. Stretch dependence of the electrical breakdown strength and dielectric constant of dielectric elastomers. Smart Mater. Struct. 2013, 22, 104012. [Google Scholar] [CrossRef]
- Rosset, S.; Niklaus, M.; Dubois, P.; Shea, H.R. Large-Stroke Dielectric Elastomer Actuators With Ion-Implanted Electrodes. J. Microelectromechanical Syst. 2009, 18, 1300–1308. [Google Scholar] [CrossRef]
- Löwe, C.; Zhang, X.; Kovacs, G. Dielectric Elastomers in Actuator Technology. Adv. Eng. Mater. 2005, 7, 361–367. [Google Scholar] [CrossRef]
- Matysek, M.; Lotz, P.; Schlaak, H.F. Lifetime Investigation of Dielectric Elastomer Stack Actuators. IEEE Trans. Dielectr. Electr. Insul. 2011, 18, 89–96. [Google Scholar] [CrossRef]
- Moretti, G.; Righi, M.; Vertechy, R.; Fontana, M. Fabrication and Test of an Inflated Circular Diaphragm Dielectric Elastomer Generator Based on PDMS Rubber Composite. Polymers 2017, 9, 283. [Google Scholar] [CrossRef] [Green Version]
- Bar-Cohen, Y.; Brochu, P.; Li, H.; Niu, X.; Pei, Q. Factors influencing the performance of dielectric elastomer energy harvesters. In Proceedings of the Electroactive Polymer Actuators and Devices (EAPAD) 2010, San Diego, CA, USA, 9 April 2010; p. 76422J. [Google Scholar]
- Yang, D.; Xu, Y.; Ruan, M.; Xiao, Z.; Guo, W.; Wang, H.; Zhang, L. Improved electric energy density and conversion efficiency of natural rubber composites as dielectric elastomer generators. AIP Adv. 2019, 9, 025035. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Song, F.; Lin, X.; Wang, D. High-dielectric-permittivity silicone rubbers incorporated with polydopamine-modified ceramics and their potential application as dielectric elastomer generator. Mater. Chem. Phys. 2020, 241, 122373. [Google Scholar] [CrossRef]
- Wang, Y.; Zhou, J.-X.; Wu, X.-H.; Li, B.; Zhang, L. Energy Diagrams of Dielectric Elastomer Generators under Different Types of Deformation. Chin. Phys. Lett. 2013, 30, 066103. [Google Scholar] [CrossRef]
- Lee, R.H.; Basuli, U.; Lyu, M.-Y.; Kim, E.S.; Nah, C. Fabrication and performance of a donut-shaped generator based on dielectric elastomer. J. Appl. Polym. Sci. 2014, 131, 40076. [Google Scholar] [CrossRef]
- Ellingford, C.; Zhang, R.; Wemyss, A.M.; Zhang, Y.; Brown, O.B.; Zhou, H.; Keogh, P.; Bowen, C.; Wan, C. Self-Healing Dielectric Elastomers for Damage-Tolerant Actuation and Energy Harvesting. ACS Appl. Mater. Interfaces 2020, 12, 7595–7604. [Google Scholar] [CrossRef] [PubMed]
- Sasso, M.; Palmieri, G.; Chiappini, G.; Amodio, D. Characterization of hyperelastic rubber-like materials by biaxial and uniaxial stretching tests based on optical methods. Polym. Test. 2008, 27, 995–1004. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, B.; Bai, Y.; Wang, H.; Zhou, J. Actuating dielectric elastomers in pure shear deformation by elastomeric conductors. Appl. Phys. Lett. 2014, 104, 064101. [Google Scholar] [CrossRef]
- Song, Z.-Q.; Ohyama, K.; Shian, S.; Clarke, D.R.; Zhu, S. Power generation performance of dielectric elastomer generator with laterally-constrained configuration. Smart Mater. Struct. 2020, 29, 015018. [Google Scholar] [CrossRef]
- Bar-Cohen, Y.; Brochu, P.; Stoyanov, H.; Niu, X.; Pei, Q. Energy conversion efficiency of dielectric elastomer energy harvesters under pure shear strain conditions. In Proceedings of the Electroactive Polymer Actuators and Devices (EAPAD) 2012, San Diego, CA, USA, 3 April 2012; p. 83401W. [Google Scholar]
- Kaltseis, R.; Keplinger, C.; Baumgartner, R.; Kaltenbrunner, M.; Li, T.; Mächler, P.; Schwödiauer, R.; Suo, Z.; Bauer, S. Method for measuring energy generation and efficiency of dielectric elastomer generators. Appl. Phys. Lett. 2011, 99, 162904. [Google Scholar] [CrossRef] [Green Version]
- McKay, T.G.; Rosset, S.; Anderson, I.A.; Shea, H. Dielectric elastomer generators that stack up. Smart Mater. Struct. 2015, 24, 015014. [Google Scholar] [CrossRef]
- Zhang, C.L.; Lai, Z.H.; Rao, X.X.; Zhang, J.W.; Yurchenko, D. Energy harvesting from a novel contact-type dielectric elastomer generator. Energy Convers. Manage. 2020, 205, 112351. [Google Scholar] [CrossRef]
- Fan, P.; Zhu, L.; Zhu, Z.; Chen, H.; Chen, W.; Hu, H. Predicting energy harvesting performance of a random nonlinear dielectric elastomer pendulum. Appl. Energy 2021, 289, 116696. [Google Scholar] [CrossRef]
- Yurchenko, D.; Val, D.V.; Lai, Z.H.; Gu, G.; Thomson, G. Energy harvesting from a DE-based dynamic vibro-impact system. Smart Mater. Struct. 2017, 26, 105001. [Google Scholar] [CrossRef] [Green Version]
- Lai, Z.H.; Thomson, G.; Yurchenko, D.; Val, D.V.; Rodgers, E. On energy harvesting from a vibro-impact oscillator with dielectric membranes. Mech. Syst. Sig. Process. 2018, 107, 105–121. [Google Scholar] [CrossRef]
- Yurchenko, D.; Lai, Z.H.; Thomson, G.; Val, D.V.; Bobryk, R.V. Parametric study of a novel vibro-impact energy harvesting system with dielectric elastomer. Appl. Energy 2017, 208, 456–470. [Google Scholar] [CrossRef]
- Thomson, G.; Yurchenko, D.; Val, D.V.; Zhang, Z. Predicting energy output of a stochastic nonlinear dielectric elastomer generator. Energy Convers. Manage. 2019, 196, 1445–1452. [Google Scholar] [CrossRef]
- Zhang, C.L.; Lai, Z.H.; Li, M.Q.; Yurchenko, D. Wind energy harvesting from a conventional turbine structure with an embedded vibro-impact dielectric elastomer generator. J. Sound Vib. 2020, 487, 115616. [Google Scholar] [CrossRef]
- Lai, Z.H.; Wang, J.L.; Zhang, C.L.; Zhang, G.Q.; Yurchenko, D. Harvest wind energy from a vibro-impact DEG embedded into a bluff body. Energy Convers. Manage. 2019, 199, 111993. [Google Scholar] [CrossRef]
- Goudar, V.; Wendt, J.B.; Potkonjak, M.; Ren, Z.; Brochu, P.; Pei, Q. Leveraging human gait characteristics towards self-sustained operation of low-power mobile devices. In Proceedings of the IEEE World Forum on Internet of Things (WF-IoT), Seoul, Korea, 6–8 March 2014; pp. 468–473. [Google Scholar]
- Bar-Cohen, Y.; Jean-Mistral, C.; Basrour, S.; Chaillout, J.-J. Dielectric polymer: Scavenging energy from human motion. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 10 April 2008; p. 692716. [Google Scholar]
- Jean-Mistral, C.; Basrour, S. Scavenging energy from human motion with tubular dielectric polymer. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 10 April 2008; p. 764209. [Google Scholar]
- Slade, J.R.; Bowman, J.; Kornbluh, R. Bio-kinetic energy harvesting using electroactive polymers. In Proceedings of the SPIE Defense, Security, and Sensing, Baltimore, MD, USA, 21 May 2012; p. 83830R. [Google Scholar]
- Kornbluh, R.; Pelrine, R.; Pei, Q.; Heydt, R.; Stanford, S.; Oh, S.; Eckerle, J. Electroelastomers: Applications of dielectric elastomer transducers for actuation, generation, and smart structures. In Proceedings of the SPIE’s 9th Annual International Symposium on Smart Structures and Materials, San Diego, CA, USA, 9 July 2002; pp. 257–270. [Google Scholar]
- Savage, N. IEEE Spectrum, Deformable Acrylics Could Turn Human Motion into Electricity. Available online: https://spectrum.ieee.org/green-tech/fuel-cells/squishy-power-generators (accessed on 18 December 2012).
- Bar-Cohen, Y.; Chiba, S.; Waki, M.; Kornbluh, R.; Pelrine, R. Innovative power generators for energy harvesting using electroactive polymer artificial muscles. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 10 April 2008; 2008; p. 692715. [Google Scholar]
- Moretti, G.; Santos Herran, M.; Forehand, D.; Alves, M.; Jeffrey, H.; Vertechy, R.; Fontana, M. Advances in the development of dielectric elastomer generators for wave energy conversion. Renew. Sustain. Energy Rev. 2020, 117, 109430. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, L.; Zhang, Z.; Jiao, Y.; Sun, S.; Leng, J. Analysis and manufacture of an energy harvester based on a Mooney-Rivlin–type dielectric elastomer. Europhys. Lett. 2010, 90, 36004. [Google Scholar] [CrossRef]
- Jean, P.; Wattez, A.; Ardoise, G.; Melis, C.; Van Kessel, R.; Fourmon, A.; Barrabino, E.; Heemskerk, J.; Queau, J.P. Standing wave tube electro active polymer wave energy converter. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 5 April 2012; p. 83400C. [Google Scholar]
- Babarit, A.; Singh, J.; Mélis, C.; Wattez, A.; Jean, P. A linear numerical model for analysing the hydroelastic response of a flexible electroactive wave energy converter. J. Fluids Struct. 2017, 74, 356–384. [Google Scholar] [CrossRef] [Green Version]
- Vertechy, R.; Fontana, M.; Rosati Papini, G.P.; Forehand, D. In-tank tests of a dielectric elastomer generator for wave energy harvesting. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 8 March 2014; p. 90561G. [Google Scholar]
- Moretti, G.; Papini, G.P.R.; Righi, M.; Forehand, D.; Ingram, D.; Vertechy, R.; Fontana, M. Resonant wave energy harvester based on dielectric elastomer generator. Smart Mater. Struct. 2018, 27, 035015. [Google Scholar] [CrossRef] [Green Version]
- Moretti, G.; Rosati Papini, G.P.; Daniele, L.; Forehand, D.; Ingram, D.; Vertechy, R.; Fontana, M. Modelling and testing of a wave energy converter based on dielectric elastomer generators. Proc. R. Soc. A 2019, 475, 20180566. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Moretti, G.; Malara, G.; Scialò, A.; Daniele, L.; Romolo, A.; Vertechy, R.; Fontana, M.; Arena, F. Modelling and field testing of a breakwater-integrated U-OWC wave energy converter with dielectric elastomer generator. Renew. Energy 2020, 146, 628–642. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | VHB 4905 | THERABAND YELLOW11726 | LR3043/500 |
|---|---|---|---|
| Unstretched Dielectric Strength E [kV/mm] | 66.2 | 97.1 | 121 |
| Relative dielectric constant, | 4.14 | 2.72 | 2.7 |
| Shear modulus [kPa] | 16.92 | 328.18 | 380 |
| Hysteresis loss [%] | 14.64 | 8.99 | 2–4 |
| Max stretch, | 7.4 | 4.4 | 5.8 |
| Conductivity, at low field [pS/m] | 5.7 × 10−1 | 6.4 × 10−2 | 1.7 × 10−5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Di, K.; Bao, K.; Chen, H.; Xie, X.; Tan, J.; Shao, Y.; Li, Y.; Xia, W.; Xu, Z.; E, S. Dielectric Elastomer Generator for Electromechanical Energy Conversion: A Mini Review. Sustainability 2021, 13, 9881. https://doi.org/10.3390/su13179881
Di K, Bao K, Chen H, Xie X, Tan J, Shao Y, Li Y, Xia W, Xu Z, E S. Dielectric Elastomer Generator for Electromechanical Energy Conversion: A Mini Review. Sustainability. 2021; 13(17):9881. https://doi.org/10.3390/su13179881
Chicago/Turabian StyleDi, Kui, Kunwei Bao, Haojie Chen, Xinjun Xie, Jianbo Tan, Yixing Shao, Yongxiang Li, Wenjun Xia, Zisheng Xu, and Shiju E. 2021. "Dielectric Elastomer Generator for Electromechanical Energy Conversion: A Mini Review" Sustainability 13, no. 17: 9881. https://doi.org/10.3390/su13179881