
Intelligent Health Assessment of Aviation Bearing Based on Deep Transfer Graph Convolutional Networks under Large Speed Fluctuations
Abstract
:1. Introduction
- (1)
- A deep transfer graph convolutional network (named DTGCN) algorithm is first proposed in this paper;
- (2)
- Based on the proposed DTGCN algorithm, an intelligent health assessment method based on DTGCN algorithm is proposed for aviation bearing under large speed fluctuations;
- (3)
- The intelligent health assessment method based on DTGCN can be validated using experimental data from aero engine bearing failure simulation.
2. Preliminaries
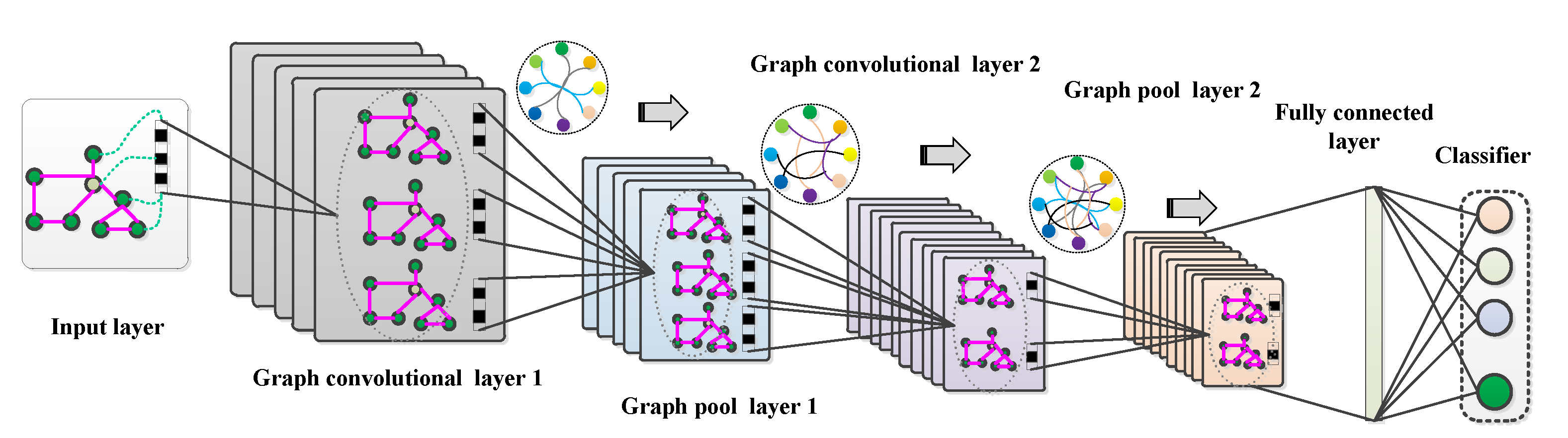
2.1. Graph Convolutional Network (GCN)
2.2. Multi Kernel-Maximum Mean Discrepancies (MKMMD)
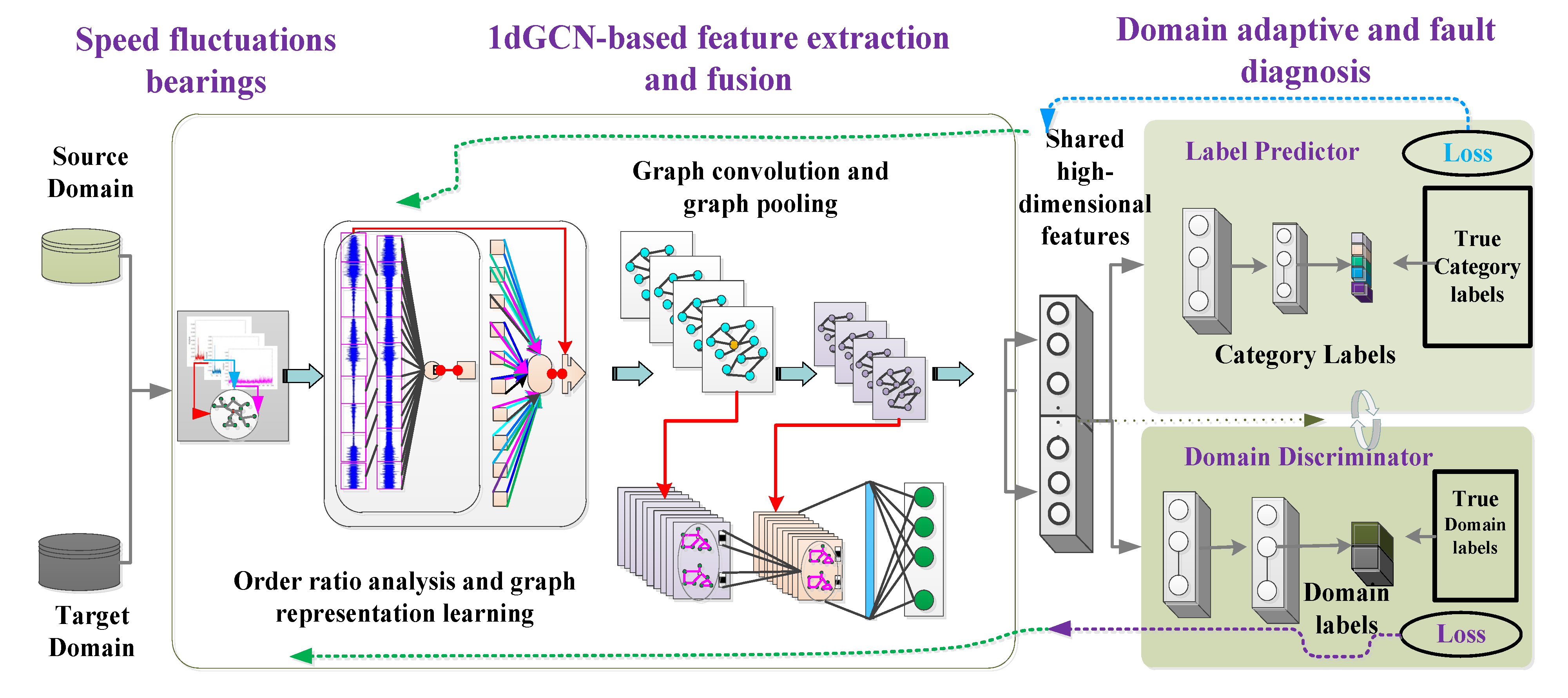
3. The Proposed Method
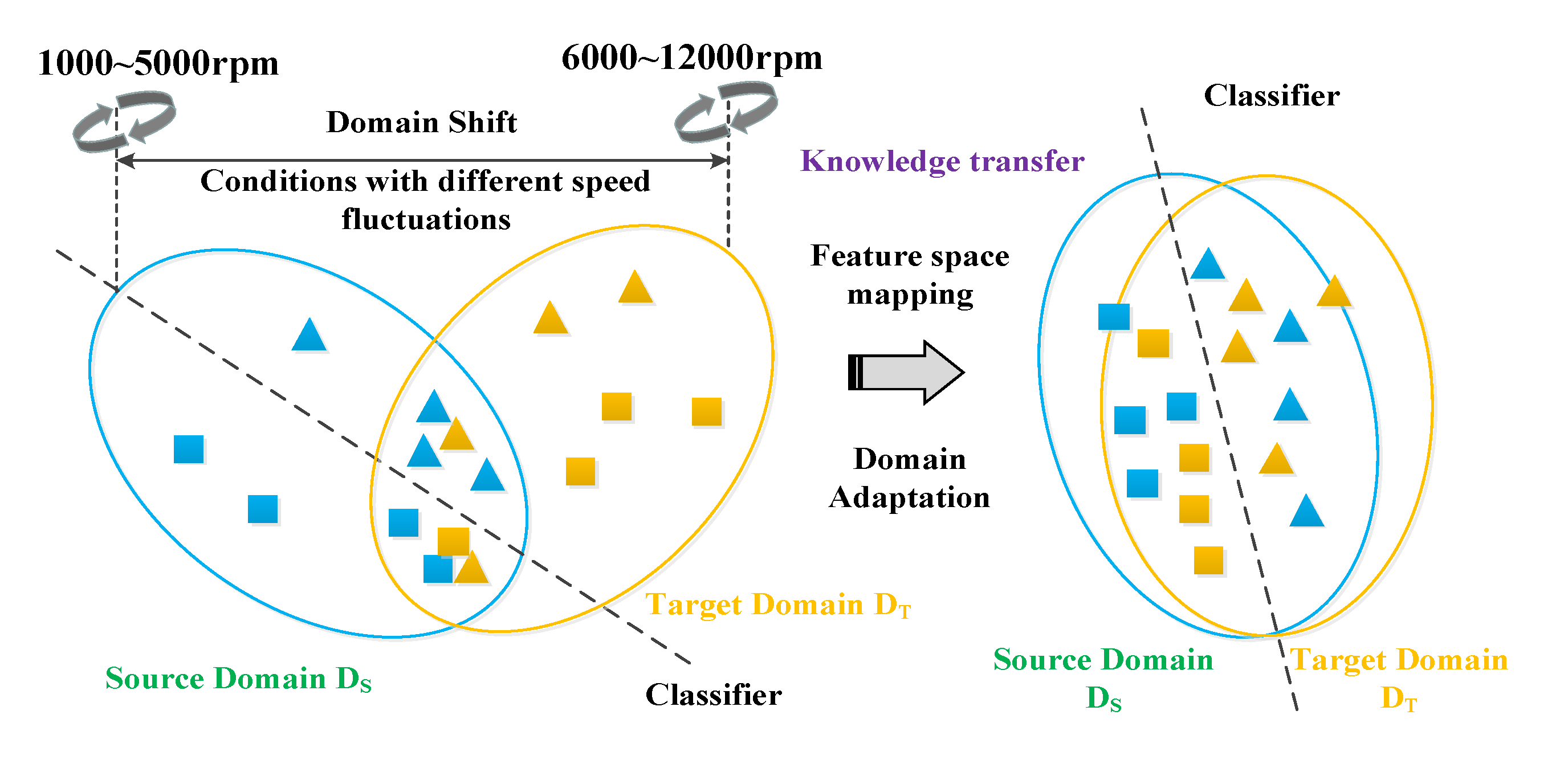
3.1. Problem Description
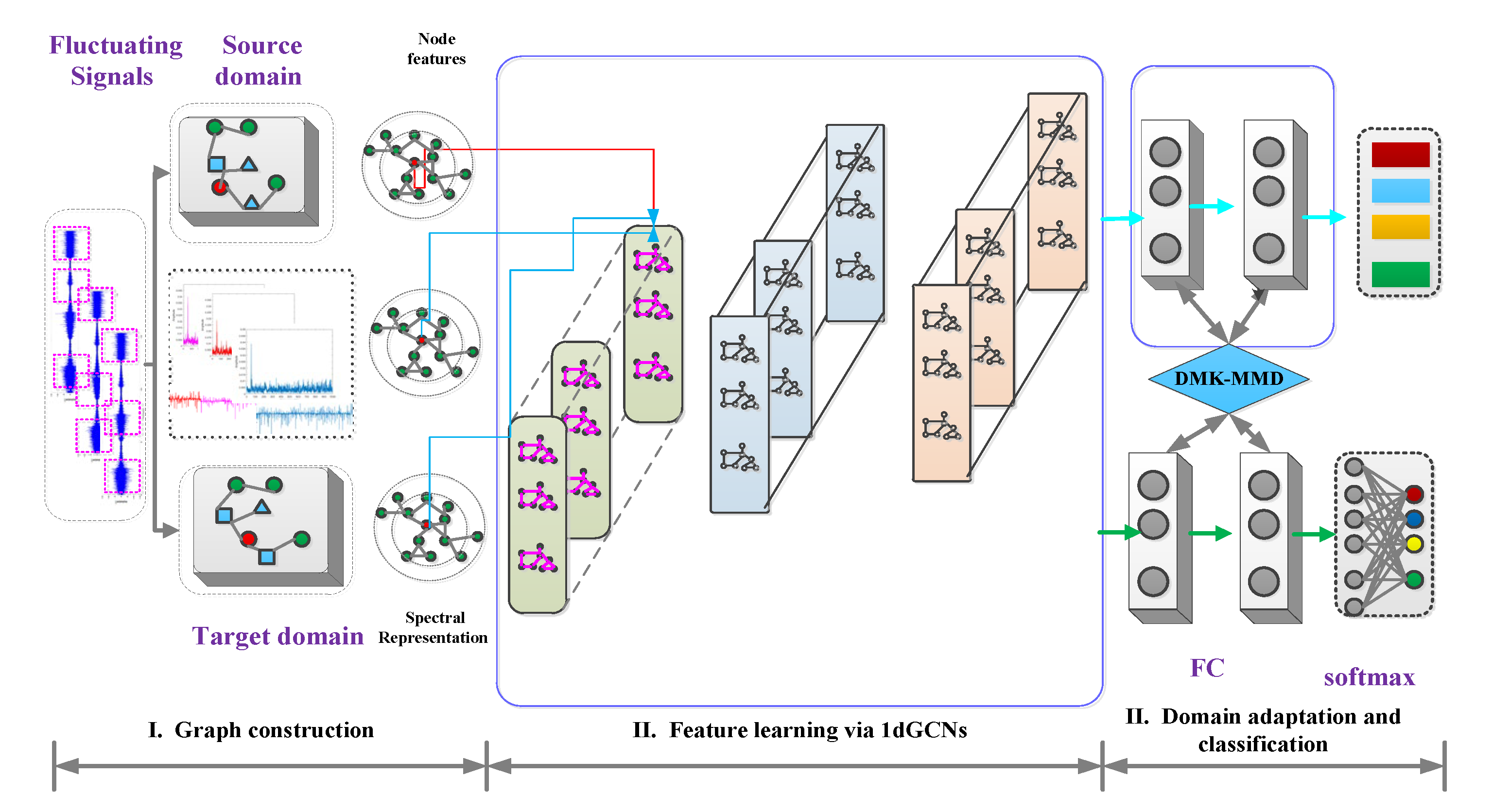
3.2. The Constructed DTGCN Algorithm
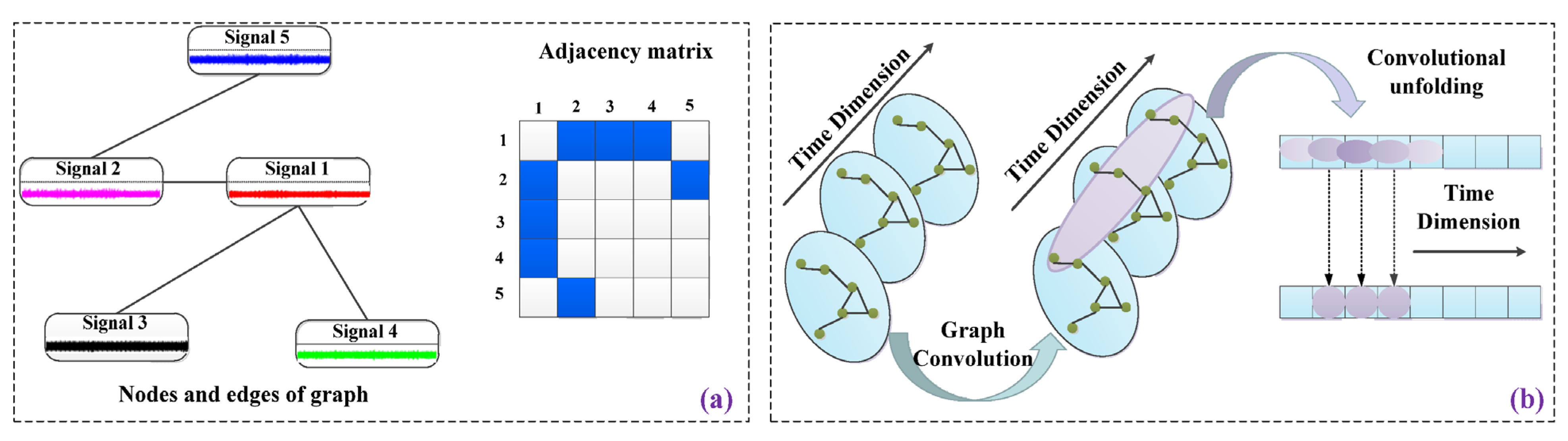
3.2.1. Graph Learning Construction Stage
3.2.2. Feature Fusion and Extraction Stage
3.2.3. Domain Adaptation and Classification Stages
3.3. The Proposed Intelligent Health Assessment Method for Aviation Bearings
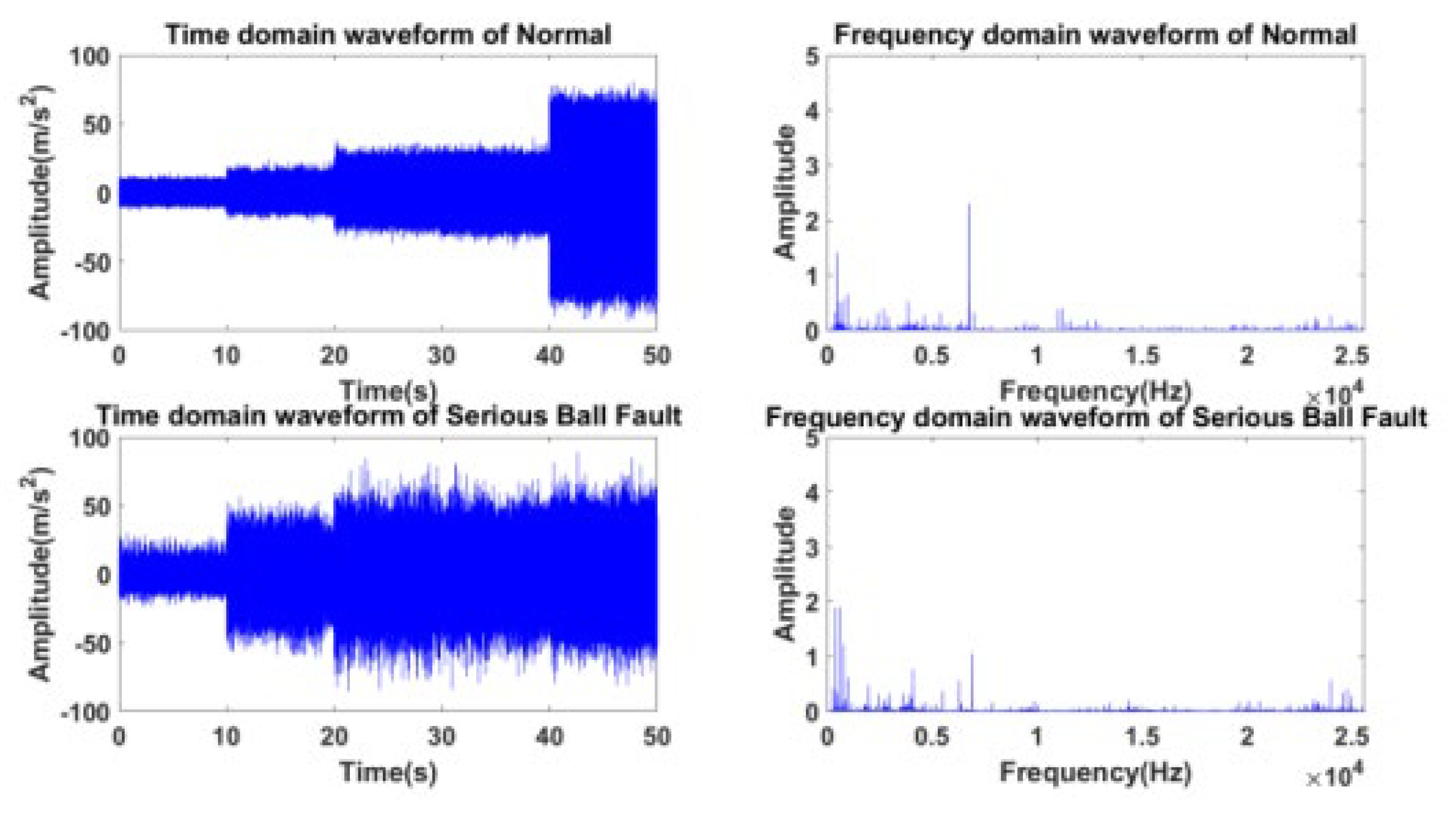
3.3.1. Signal Processing Based on Simultaneous Extraction Transform-Order Ratio Analysis
3.3.2. Feature Extraction and Intelligent Health Assessment Based on DTGCN Algorithm
4. Validation and Analysis
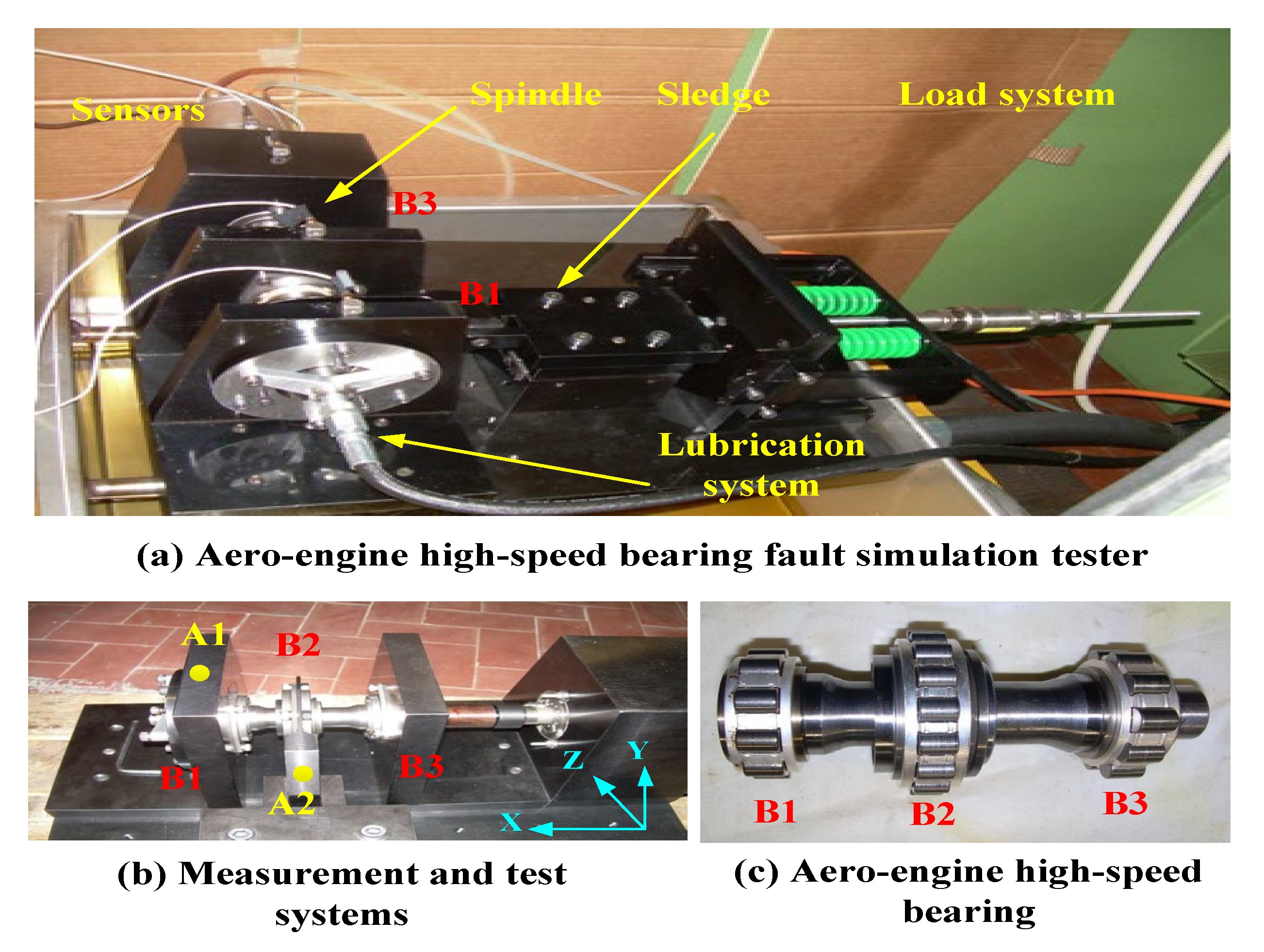
4.1. Description for Aviation Bearing Fault Simulation Test Bench
4.2. Construction of Aviation Bearing Dataset
4.3. Experimental Settings
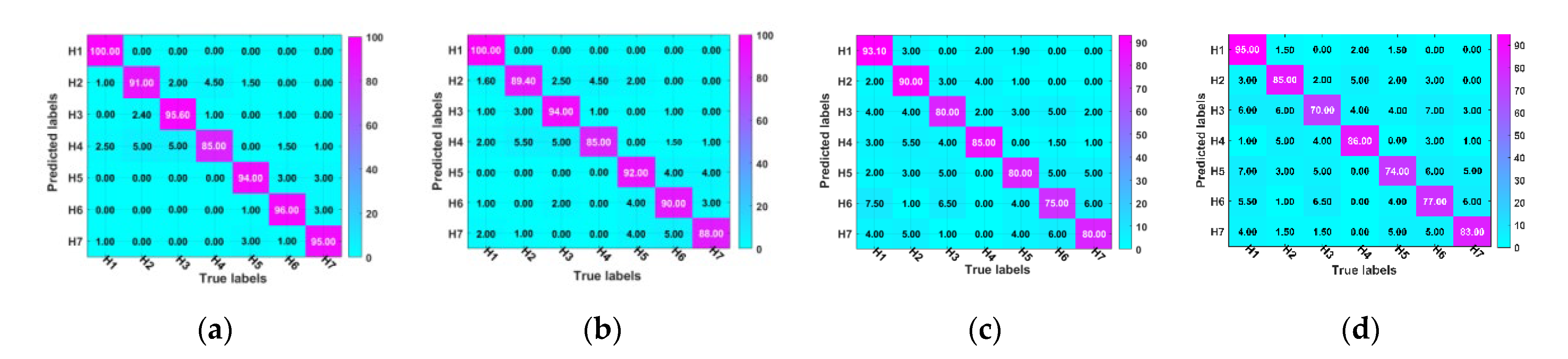
4.4. Experimental Results
4.5. Comparison with Other Relevant Methods
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, M.; Zhong, S.; Fu, X.; Tang, B.; Dong, S.; Pecht, M. Deep Residual Networks with Adaptively Parametric Rectifier Linear Units for Fault Diagnosis. IEEE Trans. Ind. Electron. 2021, 68, 2587–2597. [Google Scholar] [CrossRef]
- Chao, Q.; Zhang, J.; Xu, B.; Huang, H.; Pan, M. A review of high-speed electro-hydrostatic actuator pumps in aerospace applications: Challenges and solutions. J. Mech. Des. 2019, 141, 050801. [Google Scholar] [CrossRef]
- Chen, Z.; Liao, Y.; Li, J.; Huang, R.; Xu, L.; Jin, G.; Li, W. A Multi-Source Weighted Deep Transfer Network for Open-Set Fault Diagnosis of Rotary Machinery. IEEE Trans. Cybern. 2023, 53, 1982–1993. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Yao, J.; Deng, W.; Ding, P.; Zhuang, J.; Liu, Z. Multi-Scale Deep Graph Convolutional Networks for Intelligent Fault Diagnosis of Rotor-Bearing System under Fluctuating Working Conditions. IEEE Trans. Ind. Inform. 2022, 19, 166–176. [Google Scholar] [CrossRef]
- Chen, M.; Shao, H.; Dou, H.; Li, W.; Liu, B. Data Augmentation and Intelligent Fault Diagnosis of Planetary Gearbox Using ILoFGAN Under Extremely Limited Samples. IEEE Trans. Reliab. 2022, early access, 1–9. [Google Scholar] [CrossRef]
- Cao, H.; Shao, H.; Zhong, X.; Deng, Q.; Yang, X.; Xuan, J. Unsupervised domain-share CNN for machine fault transfer diagnosis from steady speeds to time-varying speeds. J. Manuf. Syst. 2022, 62, 186–198. [Google Scholar] [CrossRef]
- Zhao, X.; Yao, J.; Deng, W.; Jia, M.; Liu, Z. Normalized Conditional Variational Auto-Encoder with adaptive Focal loss for imbalanced fault diagnosis of Bearing-Rotor system. Mech. Syst. Signal Process. 2022, 170, 108826. [Google Scholar] [CrossRef]
- Liu, Z.; Tang, X.; Wang, X.; Mugica, J.E.; Zhang, L. Wind Turbine Blade Bearing Fault Diagnosis under Fluctuating Speed Operations via Bayesian Augmented Lagrangian Analysis. IEEE Trans. Ind. Inform. 2021, 17, 4613–4623. [Google Scholar] [CrossRef]
- Xiang, Z.; Zhang, X.; Zhang, W.; Xia, X. Fault diagnosis of rolling bearing under fluctuating speed and variable load based on TCO spectrum and stacking auto-encoder. Measurement 2019, 138, 162–174. [Google Scholar] [CrossRef]
- Lu, S.; Yan, R.; Liu, Y.; Wang, Q. Tacholess Speed Estimation in Order Tracking: A Review with Application to Rotating Machine Fault Diagnosis. IEEE Trans. Instrum. Meas. 2019, 68, 2315–2332. [Google Scholar] [CrossRef]
- Fan, W.; Cai, G.; Zhu, Z.; Shen, C.; Huang, W.; Shang, L. Sparse representation of transients in wavelet basis and its application in gearbox fault feature extraction. Mech. Syst. Signal Process. 2015, 56, 230–245. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Shao, H.; Li, W.; Cai, B.; Wan, J.; Xiao, Y.; Yan, S. Dual-Threshold Attention-Guided Gan and Limited Infrared Thermal Images for Rotating Machinery Fault Diagnosis under Speed Fluctuation. IEEE Trans. Ind. Inform. 2022, early access, 1–10. [Google Scholar] [CrossRef]
- Zhao, X.; Yao, J.; Deng, W.; Ding, P.; Ding, Y.; Jia, M.; Liu, Z. Intelligent Fault Diagnosis of Gearbox under Variable Working Conditions with Adaptive Intraclass and Interclass Convolutional Neural Network. IEEE Trans. Neural Netw. Learn. Syst. 2022, early access, 1–15. [Google Scholar] [CrossRef]
- Wang, J.; Miao, J.; Wang, J.; Yang, F.; Tsui, K.L.; Miao, Q. Fault diagnosis of electrohydraulic actuator based on multiple source signals: An experimental investigation. Neurocomputing 2020, 417, 224–238. [Google Scholar] [CrossRef]
- Chen, Z.; Xu, J.; Alippi, C.; Ding, S.X.; Shardt, Y.; Peng, T.; Yang, C. Graph neural network-based fault diagnosis: A review. arXiv 2021, arXiv:2111.08185. [Google Scholar]
- Scarselli, F.; Gori, M.; Tsoi, A.C.; Hagenbuchner, M.; Monfardini, G. The graph neural network model. IEEE Trans. Neural Netw. 2008, 20, 61–80. [Google Scholar] [CrossRef]
- Veličković, P.; Cucurull, G.; Casanova, A.; Romero, A.; Lio, P.; Bengio, Y. Graph attention networks. arXiv 2017, arXiv:1710.10903. [Google Scholar]
- Kipf, T.N.; Welling, M. Variational graph auto-encoders. arXiv 2016, arXiv:1611.07308. [Google Scholar]
- Li, T.; Zhao, Z.; Sun, C.; Yan, R.; Chen, X. Multi-receptive Field Graph Convolutional Networks for Machine Fault Diagnosis. IEEE Trans. Ind. Electron. 2020, 68, 12739–12749. [Google Scholar] [CrossRef]
- Zhao, X.; Jia, M.; Liu, Z. Semisupervised Graph Convolution Deep Belief Network for Fault Diagnosis of Electormechanical System with Limited Labeled Data. IEEE Trans. Ind. Inform. 2021, 17, 5450–5460. [Google Scholar] [CrossRef]
- Liao, Y.; Huang, R.; Li, J.; Chen, Z.; Li, W. Deep Semisupervised Domain Generalization Network for Rotary Machinery Fault Diagnosis under Variable Speed. IEEE Trans. Instrum. Meas. 2020, 69, 8064–8075. [Google Scholar] [CrossRef]
- Li, X.; Zhang, W.; Ma, H.; Luo, Z.; Li, X. Deep learning-based adversarial multi-classifier optimization for cross-domain machinery fault diagnostics. J. Manuf. Syst. 2020, 55, 334–347. [Google Scholar] [CrossRef]
- Cheng, J.; Liang, R.; Liang, Z.; Zhao, L.; Huang, C.; Schuller, B. A Deep Adaptation Network for Speech Enhancement: Combining a Relativistic Discriminator with Multi-Kernel Maximum Mean Discrepancy. IEEE/ACM Trans. Audio Speech Lang. Process. 2021, 29, 41–53. [Google Scholar] [CrossRef]
- Yang, C.; Liu, J.; Zhou, K.; Yuan, X.; Ge, M.F. Transfer Graph-Driven Rotating Machinery Diagnosis Considering Cross-Domain Relationship Construction. IEEE/ASME Trans. Mechatron. 2022, 27, 5351–5360. [Google Scholar] [CrossRef]
- Li, T.; Zhao, Z.; Sun, C.; Yan, R.; Chen, X. Domain Adversarial Graph Convolutional Network for Fault Diagnosis under Variable Working Conditions. IEEE Trans. Instrum. Meas. 2021, 70, 3515010. [Google Scholar] [CrossRef]
- Zhu, H.; He, Z.; Xiao, Y.; Wang, J.; Zhou, H. Bearing Fault Diagnosis Method Based on Improved Singular Value Decomposition Package. Sensors 2023, 23, 3759. [Google Scholar] [CrossRef]
- Zhang, W.; Li, X.; Ma, H.; Luo, Z.; Li, X. Universal Domain Adaptation in Fault Diagnostics with Hybrid Weighted Deep Adversarial Learning. IEEE Trans. Ind. Inform. 2021, 17, 7957–7967. [Google Scholar] [CrossRef]
- Daga, A.P.; Fasana, A.; Marchesiello, S.; Garibaldi, L. The Politecnico di Torino rolling bearing test rig: Description and analysis of open access data. Mech. Syst. Signal Process. 2019, 120, 252–273. [Google Scholar] [CrossRef]
- Li, J.; Huang, R.; He, G.; Liao, Y.; Wang, Z.; Li, W. A Two-Stage Transfer Adversarial Network for Intelligent Fault Diagnosis of Rotating Machinery with Multiple New Faults. IEEE/ASME Trans. Mechatron. 2021, 26, 1591–1601. [Google Scholar] [CrossRef]
- Han, T.; Liu, C.; Yang, W.; Jiang, D. Deep transfer network with joint distribution adaptation: A new intelligent fault diagnosis framework for industry application. ISA Trans. 2020, 97, 269–281. [Google Scholar] [CrossRef] [PubMed]
- Long, M.; Cao, Y.; Wang, J.; Jordan, M. Learning transferable features with deep adaptation networks. Int. Conf. Mach. Learn. PMLR 2015, 37, 97–105. [Google Scholar]
- Toma, R.N.; Prosvirin, A.E.; Kim, J.M. Bearing fault diagnosis of induction motors using a genetic algorithm and machine learning classifiers. Sensors 2020, 20, 1884. [Google Scholar] [CrossRef] [PubMed]
- Liu, D.; Zhong, S.; Lin, L.; Zhao, M.; Fu, X.; Liu, X. Highly imbalanced fault diagnosis of gas turbines via clustering-based downsampling and deep siamese self-attention network. Adv. Eng. Inform. 2022, 54, 101725. [Google Scholar] [CrossRef]
- Lu, S.; He, Q.; Wang, J. A review of stochastic resonance in rotating machine fault detection. Mech. Syst. Signal Process. 2019, 116, 230–260. [Google Scholar]
- Wang, J.; Feng, W.; Chen, Y.; Yu, H.; Huang, M.; Yu, P.S. Visual domain adaptation with manifold embedded distribution alignment. In Proceedings of the 26th ACM International Conference on Multimedia, Seoul, Republic of Korea, 22–26 October 2018; pp. 402–410. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rated Load/N | 0 | 1000 | 1400 | 1800 |
|---|---|---|---|---|
| Rotating speed (r/min) | 6000 | 6000 | 6000 | 6000 |
| 12,000 | 12,000 | 12,000 | 12,000 | |
| 18,000 | 18,000 | 18,000 | 18,000 | |
| 24,000 | 24,000 | 24,000 | / | |
| 30,000 | 30,000 | / | / |
| Labels | Damaged Areas | Diameter (um) | Rotational Speed (r/min) | Number of Samples |
|---|---|---|---|---|
| H1 | No | No | 6000~24,000 | 1000 |
| H2 | Inner ring | 450 | 6000~24,000 | 1000 |
| H3 | Inner ring | 250 | 6000~24,000 | 1000 |
| H4 | Inner ring | 150 | 6000~24,000 | 1000 |
| H5 | Roller | 450 | 6000~24,000 | 1000 |
| H6 | Roller | 250 | 6000~24,000 | 1000 |
| H7 | Roller | 150 | 6000~24,000 | 1000 |
| Source Domain Data Set | Transfer Tasks | |
|---|---|---|
| Training sample set A | A→B (T1) | A→C (T2) |
| Training sample set B | B→C (T3) | B→A (T4) |
| Training sample set C | C→A (T5) | C→B (T6) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, X.; Zhu, X.; Yao, J.; Deng, W.; Cao, Y.; Ding, P.; Jia, M.; Shao, H. Intelligent Health Assessment of Aviation Bearing Based on Deep Transfer Graph Convolutional Networks under Large Speed Fluctuations. Sensors 2023, 23, 4379. https://doi.org/10.3390/s23094379
Zhao X, Zhu X, Yao J, Deng W, Cao Y, Ding P, Jia M, Shao H. Intelligent Health Assessment of Aviation Bearing Based on Deep Transfer Graph Convolutional Networks under Large Speed Fluctuations. Sensors. 2023; 23(9):4379. https://doi.org/10.3390/s23094379
Chicago/Turabian StyleZhao, Xiaoli, Xingjun Zhu, Jianyong Yao, Wenxiang Deng, Yudong Cao, Peng Ding, Minping Jia, and Haidong Shao. 2023. "Intelligent Health Assessment of Aviation Bearing Based on Deep Transfer Graph Convolutional Networks under Large Speed Fluctuations" Sensors 23, no. 9: 4379. https://doi.org/10.3390/s23094379