1. Introduction
Structural joints are essential to connect different components within any large structure. These elements typically play a vital role in the load-bearing capacity of the structure [
1,
2,
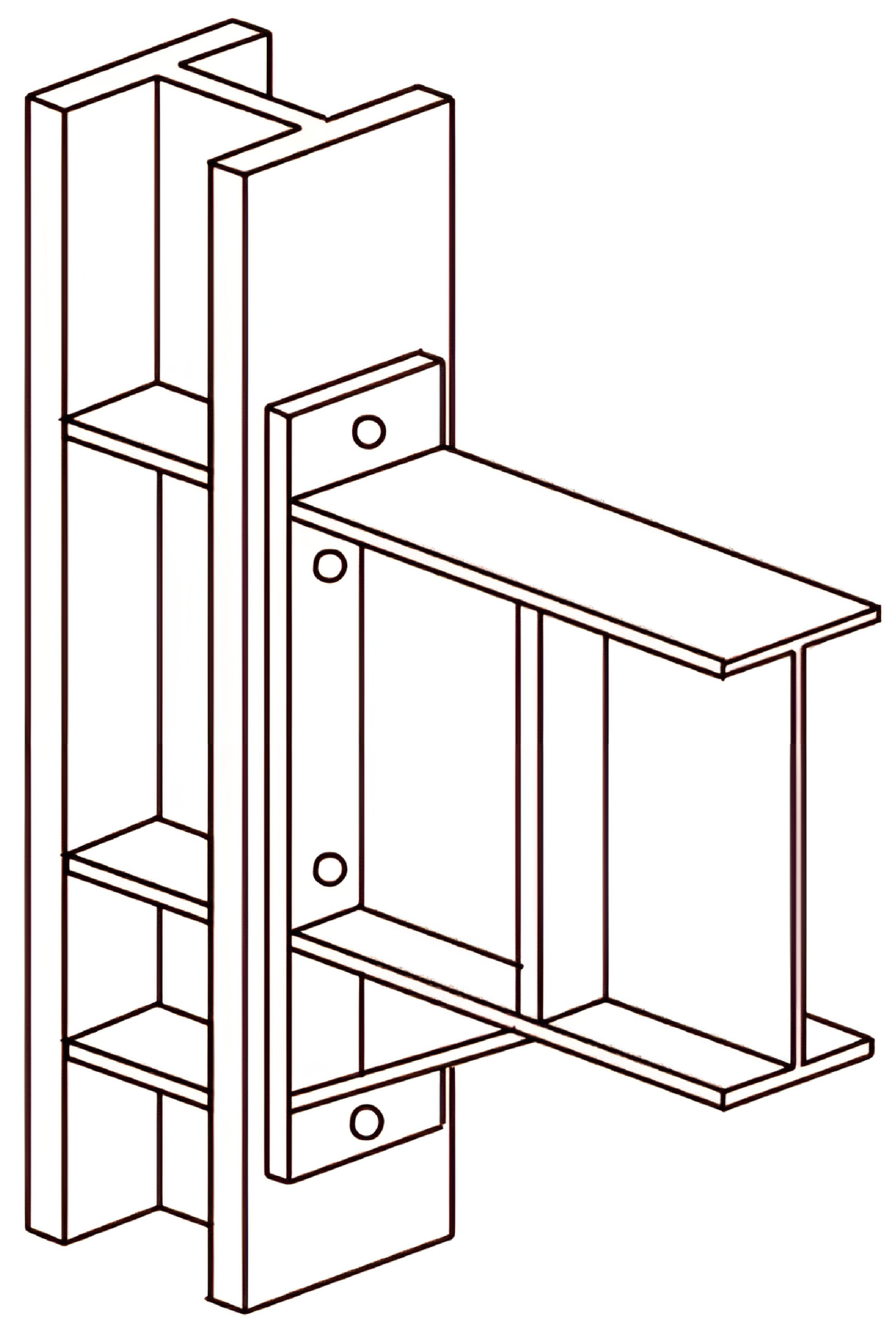
3]. One typical application of a joint in a steel structure is shown in
Figure 1. During the service stage of joints, defects caused by corrosion or fatigue can lead to catastrophic failure of the structure. Even when these defects are visible, they are not easily accessible for visual inspection [
4]. Therefore, there is a compelling need for accurate and efficient detection and identification of information on the health state of such joints.
In the context of sustainable industrial development, ensuring the reliability and sustainability of structures is of paramount importance. There are numerous established techniques for structural health monitoring (SHM) and non-destructive testing (NDT) which can help to this objective. Ultrasonic guided waves comprise one of these techniques, and are currently revolutionizing the approach to NDT and SHM [
5] because of their high sensitivity to minor damage and their online monitoring capabilities. Guided wave testing has been applied to various structural forms, including plates [
6,
7], beams [
8,
9], pipes [
10,
11], and adhesive joints [
12], and several different damage assessment methods have been presented.
Recent works have contributed to damage quantification and characterization in joint structures using guided waves. Rucka [
13] performed longitudinal and flexural wave propagation modelling using the spectral element method in the time domain. Wave speeds and reflection times were used for damage detection. Allen [
12] investigated detection of debonding at the adhesive joint using a nonlinear Lamb wave mixing approach. Fakih [
14] proposed a novel framework for damage detection, localization, and assessment using ultrasonic measurements in a dissimilar material joint. A hybrid method for damage detection and condition assessment of hinge joints in hollow slab bridges using physical models and vision-based measurements was proposed in [
15]. Allen and Ng [
16] proposed a method to evaluate applied torque levels in bolted joints by combining harmonics generated due to nonlinear Lamb wave mixing and contact acoustic nonlinearity. Lyathakula [
17] developed an integrated damage diagnostic–prognostic framework for remaining useful life estimation in adhesively bonded joints under fatigue loading. Wu et al. [
18] developed a fast inspection technique for weld defects in a steel T-welded joint structure using Rayleigh-like feature guided waves. Their method utilized the semi-Analytical Finite Element method to acquire modal solutions. Except for the first and last mentioned studies for damage detection in joints, these studies rely on traditional finite element simulations for guided wave propagation and damage interaction, which can be inefficient. Additionally, there is ample room for further research and exploration in the field of damage identification in joints.
As evidenced by the above reviewed papers, numerical models of wave propagation and wave damage interaction play an important role in damage characterization, in particular for physics-based methods [
7,
8,
19]. WFE is one of the most popular approaches; it can fully exploit the advantage of the traditional finite element model while being even more efficient. Below, we provide a review of works that simulate joints using WFE. Renno and Mace [
20] combined finite element and wave finite element methods to calculate the scattering coefficients of a joint; the numerical cases of an L-frame, lap-jointed laminated beams, and an orthotropic beam with a slot were used to illustrate their approach. Mitou [
21] investigated the wave propagation and scattering coefficients of joined structures composed of one joint and different numbers of plates. Aimakov [
22] proposed a semi-analytical method for computing energy scattering coefficients for joints connecting an arbitrary number of semi-infinite orthotropic plates. Denis [
23] assessed the reflection and transmission coefficients of waves around defects and curved joints. An optimization procedure was proposed to magnify the amplitude of the signals reflected by defects to guide the design of curved joints. Chronopoulos [
24] quantified guided wave interaction effects modelled using the WFE with localized structural nonlinearities within complex composite structures. The proposed approach enabled generation of higher harmonics and sub-harmonics through harmonic balance projection. Malik [
25] proposed a WFE-based approach for complete transient simulation of ultrasonic guided waves in one-dimensional waveguides. The scattering coefficients of composite beams with three types of damage, namely, notches, cracks, and delamination, were calculated, and a model reduction strategy was adopted to reduce the calculation time. Takiuti [
26] conducted an initial investigation of Lamb wave scattering from discontinuities associated with high-frequency corrosion-like damage. However, few works have considered the use of wave–damage interactions for practical applications in joints.
The calculation efficiency is one of the main bottlenecks complicating successful implementation of physics-based damage identification approaches [
6]. Wu et al. [
27] developed a dedicated physics-based Bayesian framework for extracting damage characteristics from ultrasound measurements in plate-like structures. A semi-analytical forward model was employed to perform rapid computations of wave–damage interactions, improving the robustness and efficiency of the inversion procedure. Fakih [
14] used an artificial neural network-based surrogate model with Approximate Bayesian Computation for increased computational efficiency. However, analytical solutions have restricted application, and it is not always appropriate to increase efficiency by including them. Additionally, the latter study’s method employed a neural network, which often necessitates additional sample data [
28].
The goal of the current study is to create a novel method for dealing with damage identification goals in three-dimensional joints with any shape and finite size. To this end, a method for identifying the size of circular holes in a joint formed in an aluminium plate is proposed using the Bayesian inverse procedure. The proposed Bayesian framework uses a kriging-based surrogate model of the WFE approach to obtain the scattering coefficients corresponding to different defect sizes numerically. The continuity and equilibrium conditions of the joint with respect to each waveguide are used to solve the scattering feature. This study uses a particular joint form as a case study. However, using WFE it is simple to extend it to any shape. The referenced surrogate model is trained on a database containing measured scattering properties to alleviate the computational burden. Furthermore, considering that the geometry of the joint is relatively small, the scattered signal caused by the defect is difficult to distinguish from the signal reflected from the boundary; thus, a clear scattered signal cannot be obtained. Therefore, the steady-state waveform is chosen to excite the joint in the monitoring test. Then, a damage feature in the frequency domain is obtained using a specific signal processing method, by which scattering coefficients are extracted from the time-domain experimental signals. Finally, the proposed method is validated through a full finite element simulation and a physical experimental case. Finally, the consequences of different sensor locations are assessed and discussed.
The rest of this manuscript is organized as follows.
Section 2 introduces the experimental study on plate joints using guided wave monitoring tests.
Section 3 outlines the physics-based Bayesian inference framework used to identify the amount of damage, including the formulation of the wave finite element model described in
Section 3.2 and the kriging surrogate model described in
Section 3.3. In
Section 4 and
Section 5, numerical and experimental cases are respectively provided. Finally, our conclusions are presented in
Section 6.
2. Guided Wave Monitoring Testing of Joints and Damage Feature Extraction
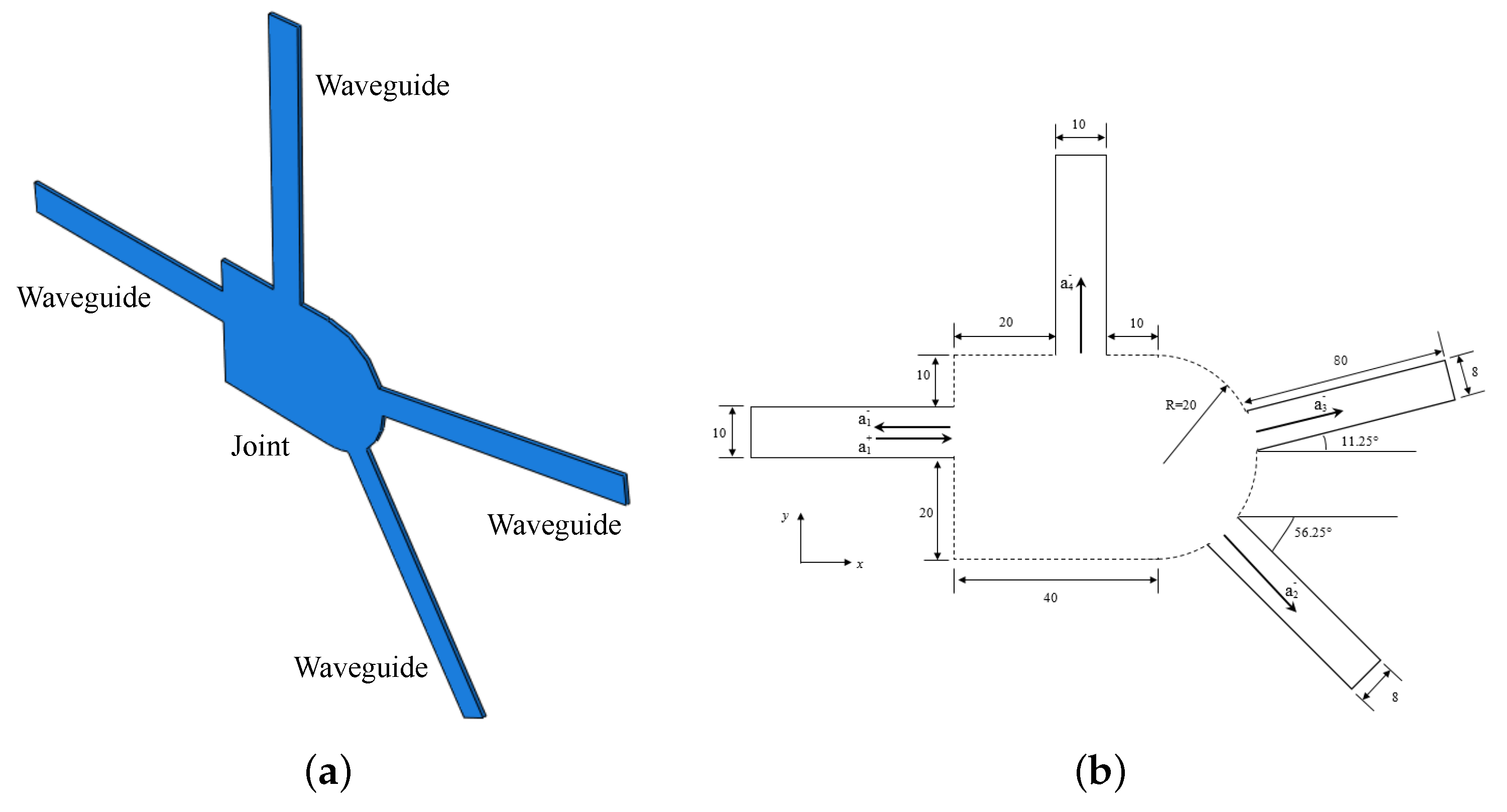
This section explores the feasibility of damage identification in aluminium joints through experimental studies. Defect-related scattering coefficients are extracted and assessed. To highlight the universality of the damage identification framework, an arbitrarily-shaped joint, shown in
Figure 2, is used. The joint is based on a central plate attached to four rectangles to represent the braces of the joint, with the elements cut using a water jet for geometrical accuracy. The material properties of the aluminium plate are shown in
Table 1.
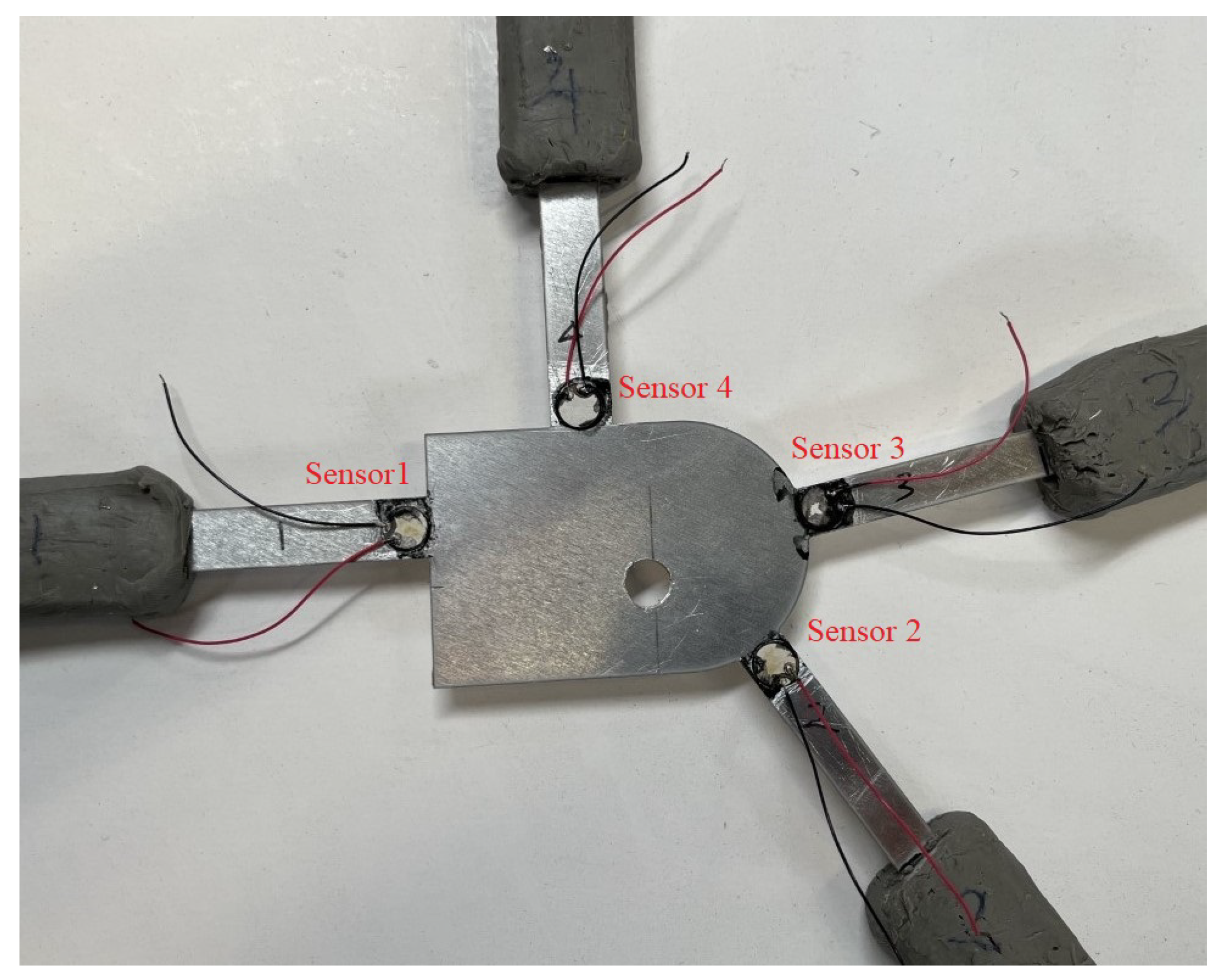
Piezoelectric (PZT) sensors are placed where maximum damage sensitivity is achieved, i.e., on different braces next to the edge of the central plate. The signals and associated damage-sensitive features extracted from these data are expected to change in a monotonic fashion with increasing damage levels [
29]. The position of different sensors is shown in
Figure 3. The sensors are 7 mm in diameter and 0.2 mm in thickness with radial mode vibration and a resonant frequency of 300 kHz. Sensor #1 is used to generate an input waveform, and the rest of the PZT sensors receive the reflected and scattered signals. The ends of the braces are covered by plasticine to effectively reduce the influence of the reflections and create a pseudo-absorbing boundary condition. Thus, the performance of the signals scattered by the defect is enhanced.
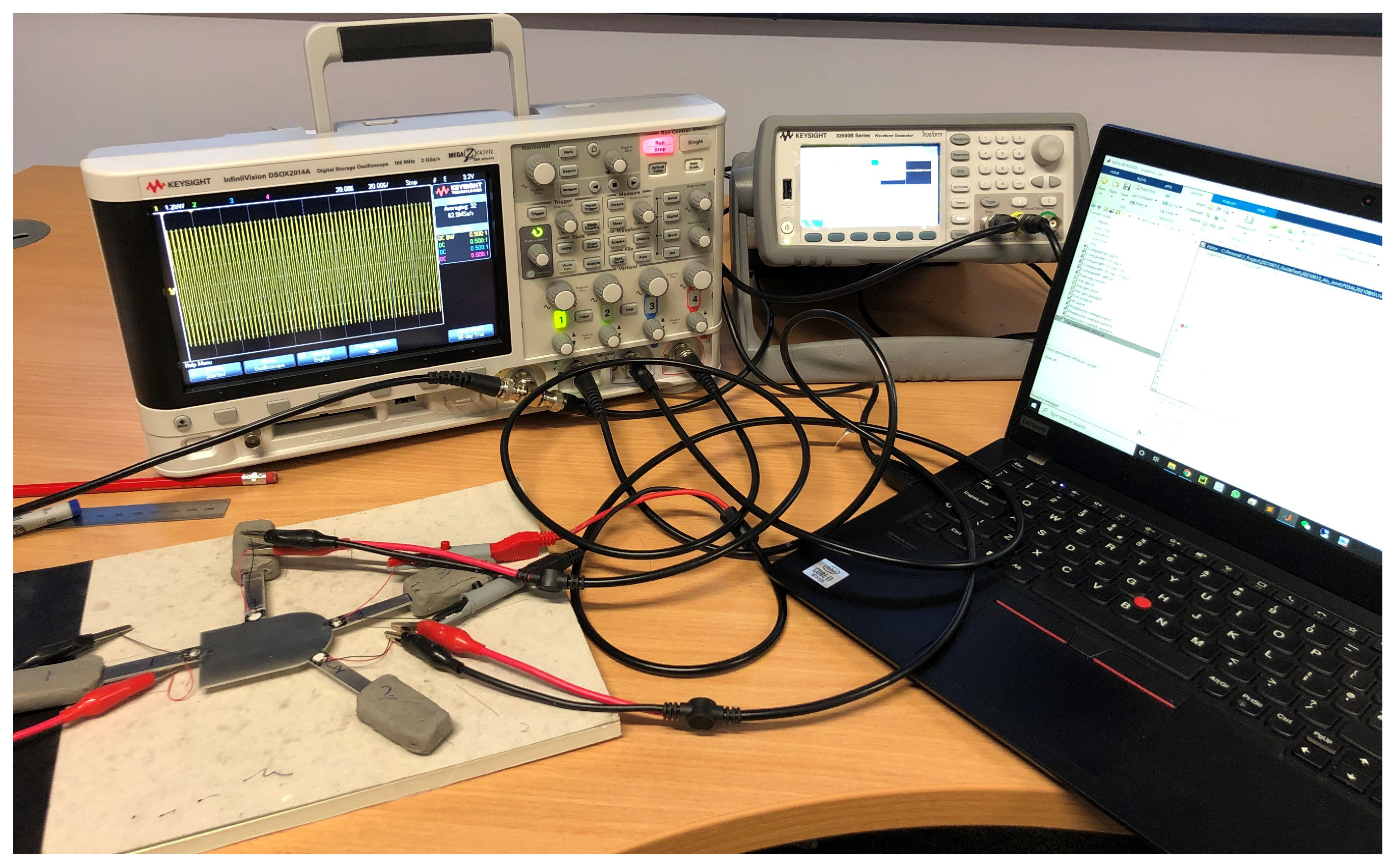
The overall experimental setup is shown in
Figure 4. A Keysight 33512B arbitrary waveform generator was used to generate a steady-state sinusoidal waveform in a specific frequency and a DSOX2014A oscilloscope was used to digitize the signals using a sampling frequency of 9.6 MHz, with an average of 32 measurements to increase the signal-to-noise ratio.
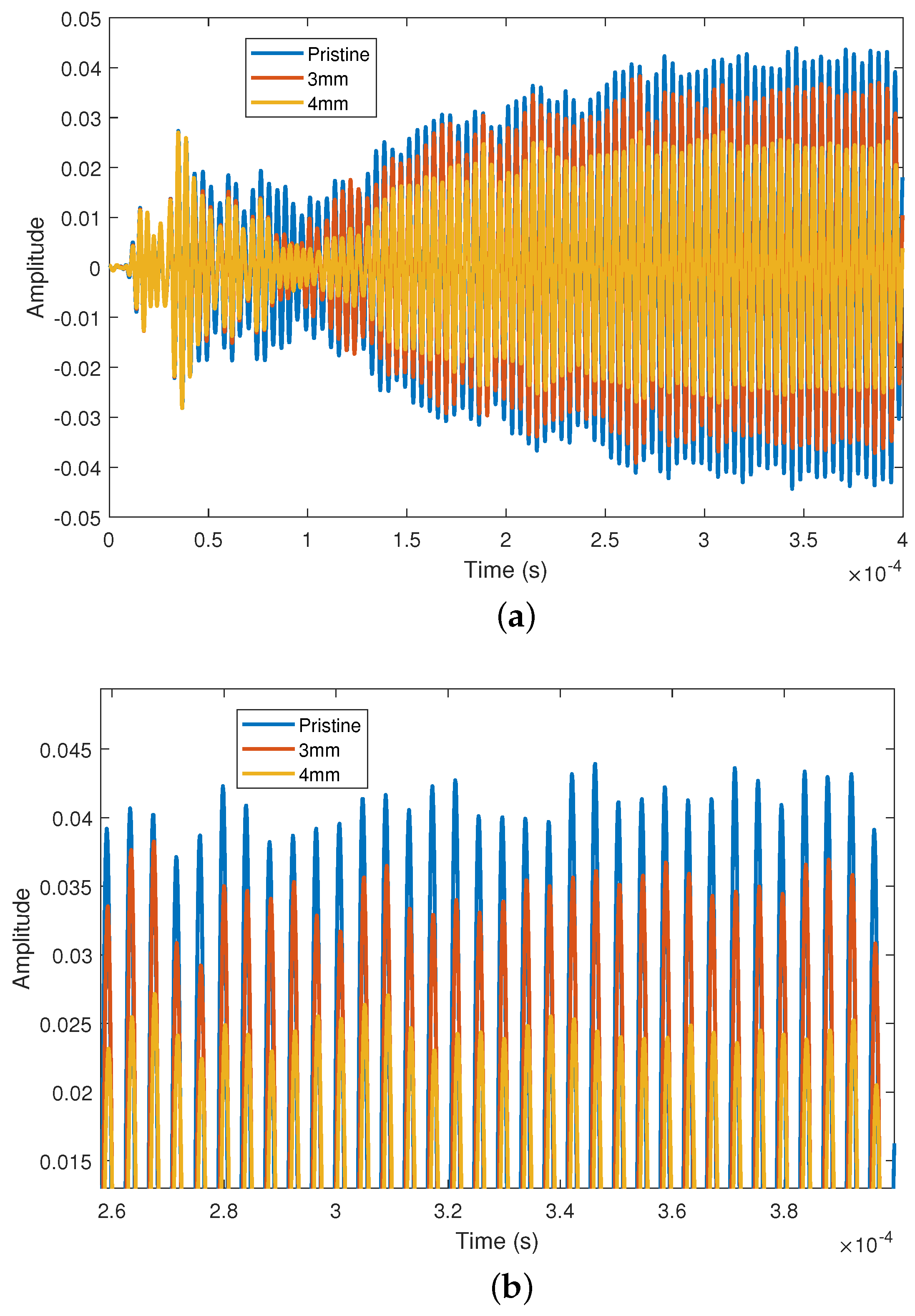
The time domain signals at 240 kHz for pristine and different damage states are shown in
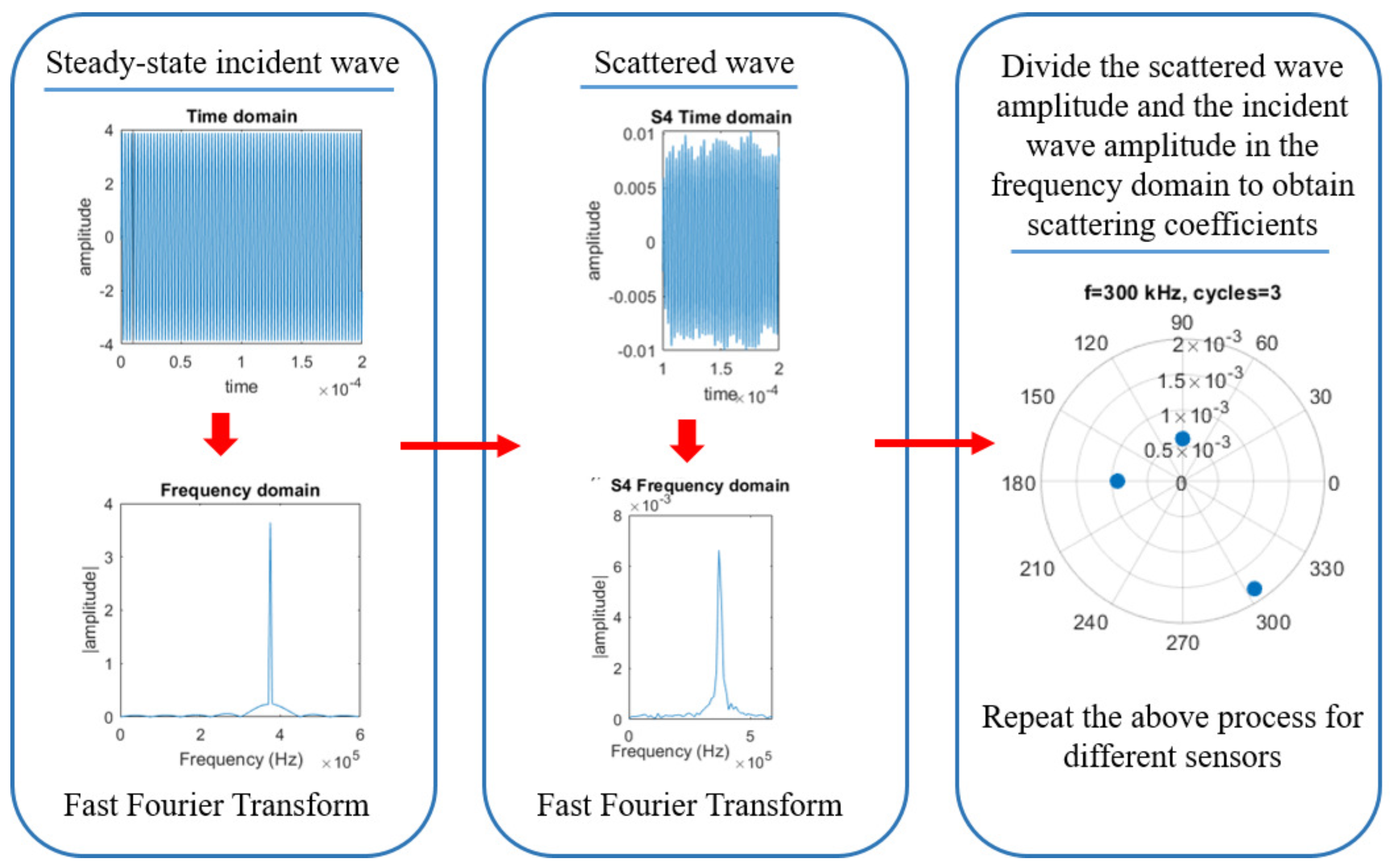
Figure 5. Note that after 0.25 ms the signal amplitude stabilizes, which is because the steady-state output is obtained when the steady-state waveform is excited in the linear system. After the defect is introduced, the amplitude becomes larger after stabilization. The larger the defect is, the smaller the observed amplitude of scattered waves. In this context, the scattering properties of defects are proposed for use as damage indicators. In this work, the frequency domain technique for calculation of the scattering coefficients [
30,
31,
32] is adopted, which requires the three steps schematically illustrated in
Figure 6. First, the fast Fourier transform of the incident wave is computed. Second, the incident wave is subtracted from the wave of the different damage states to obtain the scattered wave and the fast Fourier transform is computed. Finally, the coefficients are computed by dividing the frequency spectra of the reflected/transmitted part of the signal by that of the incident part.
4. Numerical Validation
A full FE model of the joint shown in
Figure 2 is presented here to validate the damage identification framework. The ultrasonic signal
is generated using Abaqus FEM, whereby the scattering coefficients are obtained.
Figure 9 shows the FE geometry configuration. The centre of a through-thickness circular hole with radius 5 mm is located 35 mm to the left of the joint and 15 mm to the lower side. An incident steady wave is generated by applying in-plane displacement to the centre of the actuator, with a forcing function based on a steady-state sinusoidal waveform with different frequencies. The model is meshed by using 8-node general purpose linear brick elements (C3D8R) [
47], with reduced integration and a maximum element edge length of 0.3 mm. The in-plane displacements are monitored at the centre of the sensors. Then, following the signal processing procedure presented in
Section 2, the monitored displacements are processed to obtain the scattering field.
Samples from the posterior PDFs of model parameters are obtained through the MH algorithm (refer to
Appendix A) using 100,000 samples and a Gaussian proposal distribution. The burn-in period is specified as 20,000. A uniform prior distribution was used with bounds [2.125 mm, 2.875 mm] for radius
r and [
,
] for standard deviation of the error term
. The signals from different locations were used simultaneously. The inferred results, including the maximum a posteriori values (MAP), mean, standard deviation (Std), and coefficients of variation (COV) [
37], are described in
Table 2. The COV is a measure of the dispersion of a variable, and is defined as the variable’s standard deviation divided by the mean. The posterior distribution of identified parameters (the radius and standard deviation) are shown in
Figure 10. In terms of the MAP, the error of the radius is 2.4%, which shows a remarkable agreement between the real and inferred defect sizes.
It should be noted here that the signals from sensors at different locations can be used for damage characterization. Three different locations are investigated here, with the inferred results shown in
Table 3. The sequence of the sensors is the same as that shown in
Figure 9. Note that the error of the inference results varies with the position from which the signal is emitted, and is minimal when signals from S1, S2, and S3 are used simultaneously. These results demonstrate that a single SHM configuration based on a sensor–actuator pair is sufficient to identify damage; however, the inference error is reduced when signals from different locations are used simultaneously.
5. Validation against Physical Experiments
In this section, a case study involving a physical experimental is presented to verify the proposed framework. The experimental equipment, monitoring methods, and specimen size are exactly the same as those explained in
Section 2. After obtaining the time domain signal, the frequency domain damage features are determined using the procedure described in
Figure 6. A uniform prior distribution is used with bounds [1.2 mm, 3.8 mm] for the radius
r and [
,
] for the standard deviation
. Similar to the previous case study, the inferred process is carried out using the MH algorithm with 10,000 samples, and signals from different locations are used simultaneously. The inferred results, including the MAP, mean, standard deviation, and COV of the model parameters, are shown in
Table 4. The posterior distribution and contour plots of the inferred parameters are shown in
Figure 11. Note that the error of the inferred radius of the damage in terms of MAP is 22.0%. This relatively large error is mainly caused by the inconsistency between the ideal structural model in the finite element model and the actual specimen in the experiment, as well as to the differences between the crack shape and the actual model.
Similarly, three different locations are compared here, with the results shown in
Table 5. Unlike from the inference based on the FE model, the inversion error based on S1 is the smallest. Again, simultaneous use of signals from three locations improves inversion accuracy.


 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}