
LoRa Technology in Flying Ad Hoc Networks: A Survey of Challenges and Open Issues

1
School of Engineering, College of Computing, Engineering and Construction, University of North Florida, Jacksonville, FL 32224, USA
2
School of Computing, College of Computing, Engineering and Construction, University of North Florida, Jacksonville, FL 32224, USA
*
Authors to whom correspondence should be addressed.
Sensors 2023, 23(5), 2403; https://doi.org/10.3390/s23052403
Submission received: 19 January 2023
/
Revised: 13 February 2023
/
Accepted: 18 February 2023
/
Published: 21 February 2023
(This article belongs to the Section Sensor Networks)
Abstract
:The Internet of Things (IoT) and Flying Ad Hoc Networks (FANETs) have become hot topics among researchers because of the increased availability of Unmanned Aerial Vehicles (UAVs) and the electronic components required to control and connect them (e.g., microcontrollers, single board computers, and radios). LoRa is a wireless technology, intended for the IoT, that requires low power and provides long-range communications, which can be useful for ground and aerial applications. This paper explores the role that LoRa plays in FANET design by presenting a technical overview of both, and by performing a systematic literature review based on a breakdown of the communications, mobility and energy topics involved in a FANET implementation. Furthermore, open issues in protocol design are discussed, as well as other challenges associated with the use of LoRa in the deployment of FANETs.
1. Introduction
Due to what has been called the “wireless revolution” [1,2], the last couple of decades has seen an expansion in the number of connected devices aimed at making our lives easier at home and at work, as is the case with body sensors, light dimmers, vacuum cleaners, thermostats, refrigerators, autonomous vehicles, and many more items. Various sources claim that the number of connected devices has largely surpassed the number of connected people, establishing its potential magnitude in the order of tens of billions [3,4,5]. These connected devices need the means to communicate with each other as well as with the user, and this is frequently referred to as the Internet of Things (IoT). More formally, the IoT is the collection of objects that are equipped with sensors and actuators and are interconnected through a private or public network—generally the Internet in the latter scenario. The rise of the IoT, as is the case with many technological innovations, has been driven by the desire to improve quality of life in a cost-efficient manner [3].
While human communications often demand considerable bandwidth (e.g., on-demand video streaming and file sharing) and have little tolerance for delay (e.g., voice calls and videoconference), communications between objects have different characteristics, at least for the time being. IoT communications usually involve low data rates, where a relaxation of bandwidth constraints usually results in lower power consumption and a longer communication range, considering that these devices might be placed at isolated locations with no access to a power grid or Wide Area Networks (WANs) such as those available through internet service providers, mobile carriers, or proprietary deployments.
In a natural step in the development of wireless technologies, ad hoc networks were conceived as a way of connecting nodes when no centralized infrastructure is available, and the concept of mobility was immediately tied to this type of network [6]. Mobile Ad Hoc Networks (MANETs) have been used for military applications for many years [7]. As they increasingly connect more and more objects across the globe, MANETs have become one of the fundamental network paradigms in IoT. Moreover, the recent surge in the availability of consumer drones (also known as Unmanned Aerial Vehicles, or UAVs; terms used interchangeably hereafter), has given rise to the concept of Flying Ad Hoc Networks (FANETs).
1.1. Motivation
While existing wireless technologies—such as cellular and Wi-Fi—have been adapted for the IoT [8,9], Low Power Wide Area Networks (LPWANs) have been developed specifically as one of the IoT’s enabling technologies for long-range applications [10,11,12,13]. LoRa is a PHY-layer LPWAN technology that provides long-range communication at low data rates. Due to its scalability, low power consumption, and ease of deployment, LoRa technology has gained a lot of attention from researchers recently. Its attributes make it suitable for IoT applications, particularly when used as part of LoRaWAN—a protocol used to create a star topology network using LoRa technology. However, when it comes to MANETs and FANETs, LoRaWAN presents some limitations regarding its star topology, its medium access control (MAC) layer and its lack of routing procedures [14].
Some work has been done to assess the performance of LoRa without the constraints of LoRaWAN, for static and ground-mobile ad hoc mesh networks in typical IoT scenarios [15,16,17,18,19,20,21,22,23]. However, there is little research activity on FANETs using LoRa technology. Therefore, a systematic review is needed to determine the technological maturity of FANETs using LoRa and to understand the requirements for the MAC protocols and routing mechanisms associated with such implementation. Moreover, FANETs have particular mobility characteristics when compared to a usual MANET; thus, a review of mobility models and optimal placement algorithms is also required for this kind of network.
1.2. Methodology
A systematic literature review was conducted aiming at finding the most common or, if possible, more appropriate MAC protocols and routing mechanisms used for the deployment of LoRa-based FANETs. Furthermore, the review also aims at identifying the mobility or optimal positioning models that have been used, and the role LoRa plays in these works.
1.2.1. Search Strategy
The search was performed using the Google Scholar search engine and the following digital libraries: IEEE Xplore, Multidisciplinary Digital Publishing Institute (MDPI), ScienceDirect, and the Association for Computing Machinery (ACM). The keywords and search expressions used are shown in Table 1.
The search was restricted to the English language, and filters for publication year were applied to limit the search results to the last five years (2017–2022), for two reasons: First, LoRaWAN v1.0 was released in 2015, bringing attention from various researchers and industry; therefore, a multitude of research and publication of articles on related topics has occurred from 2017 onwards. Second, the goal was to review the most recent literature in this field.
1.2.2. Inclusion and Exclusion Criteria
In order to limit the included articles to a more manageable number, they were arranged by relevance, and only the most relevant per search expression were selected from each source library after screening titles and abstracts, with a limit of three when available. After a more thorough review of the retrieved articles, additional publications were included from their references when identified as relevant.
1.3. Scope
Numerous studies have been carried out using LoRa or LoRaWAN with UAVs, but not many have covered the complete spectrum of topics involved in the deployment of FANETs. The identified problems involved in a FANET implementation are related to communications, mobility, and energy constraints, and are listed in Table 2.
The specified problems are inherent to FANETs, regardless of the purpose that LoRa serves in the network, whether it is as a backhaul network, access network, or both. It is important to identify how these topics are addressed when LoRa is used in the context of FANETs.
The contributions of this paper are listed as follows:
- Providing a breakdown and discussion of the research challenges involved in the implementation of FANETs.
- Exploring the state of the art of using LoRa technology in FANETs.
- Identifying the mobility models, MAC protocols, and routing techniques that are commonly used for the implementation of FANETs using LoRa technology.
The remainder of the paper is organized as follows: Section 2 presents an overview of LoRa and FANETs. Section 3 covers the critical review of the literature in the context of communications, mobility, and energy constraints. A discussion of the findings and open issues is contained in Section 4. Finally, the concluding remarks are stated in Section 5.
2. Overview of LoRa and FANETs
The radio access network for IoT devices has particular requirements: scalability, low cost, long-range coverage, and low power consumption. Many competing technologies intend to provide radio network access for the IoT. There are also several LPWAN technologies, such as Ingenu, Weightless (W, N and P), Sigfox, and LoRaWAN [10,12]. Out of all of these, LoRaWAN is one of the most adopted, because of its relative simplicity and low cost [10,24].
Among cellular solutions for IoT access networks, we can count the Third Generation Partnership Project (3GPP) standards as EC-GSM-IoT, Narrow Band IoT (NB-IoT), enhanced Machine-Type Communications (eMTC) [25], and Massive Machine-Type Communications (mMTC), which is the current IoT specification in 5G (Releases 16 and 17) [26]. These specifications have managed to reduce costs and energy consumption but have not been able to reach the adoption levels of other LPWAN technologies [10,13].
The same features that make LoRa suitable for IoT access networks also make it appealing for its use in FANET communications, which are of mesh topology in nature. Battery constraints limit the flight time of UAVs; thus, a communication mechanism that requires less energy is convenient. Also, one of FANETs potential applications derives from situations where conventional communications infrastructure might be unavailable, in which case long-range capabilities are desirable. In this scenario, exploiting LoRa, in combination with medium access control and routing mechanisms, is more adequate than using LoRaWAN, which has a star topology. A technical background on LoRa and LoRaWAN is presented in Section 2.1, while a description of FANET characteristics is presented in Section 2.2.
2.1. LoRa and LoRaWAN
Often, LoRa and LoRaWAN are mentioned interchangeably; however, though complementary, they are two different things. LoRa is a PHY layer proprietary technology owned by Semtech [27], while LoRaWAN is an open network protocol specification—promoted by the LoRa Alliance—that uses LoRa as its physical layer but includes MAC and application layers [27,28].
2.1.1. LoRa
LoRa uses a form of spread spectrum modulation called Chirp Spread Spectrum (CSS) to achieve low-power communications in the range of kilometers [13,29,30] at the expense of data rate. In this modulation technique, symbols are made of chirps. Chirps are sinusoidal signals whose frequency increases or decreases continuously within a certain range and at a certain rate [31]. The modulation parameters are described next and summarized in Table 3.
- A.
- Frequency
LoRa was conceived to transmit over unlicensed spectrum in industrial, scientific, and medical (ISM) bands. It currently operates in the 169 MHz, 433 MHz, 470 MHz, 490 MHz, 780 MHz, 868 MHz, 915 MHz, and 2.4 GHz bands [32], subject to national and regional regulations.
- B.
- Bandwidth (BW)
Bandwidth is the frequency range over which the chirps vary. It can take any of ten values ranging from 7.8 kHz to 1625 kHz, depending on the chipset and frequency band [33,34,35,36,37].
- C.
- Spreading Factor (SF)
The spreading factor represents the rate at which the frequency varies over the bandwidth. In other words, it defines the chirp (symbol) duration. The SF currently ranges from 5 to 12 [35,36,37], and the relationship between the SF value and the symbol duration is defined as follows:
where is the symbol duration. Reciprocally, the symbol rate can be defined as:
According to the LoRa design, the SF also represents the number of modulated bits per symbol, through which we can obtain the modulated bit rate:
Considering that each symbol has the same duration, this tells us that the symbols are defined by the starting frequency of the chirp.
- D.
- Coding Rate (CR)
LoRa implements forward error correction (FEC) by adding redundancy bits to every four bits of data. The number of redundancy bits is given by CR and can go from one to four. Thus, ref. [31] defines the rate code as:
The data bit rate is the product of the modulated bit rate and the rate code, as follows:
- E.
- Transmission Power
The transmission power can reach up to 22 dBm, depending on the chipset selection and power amplifier configuration [33,34,35,36,37].
Two of the key parameters behind LoRa modulation are SF and BW. The relationship between these two factors defines the signal’s data rate, range, and time on air. The higher the SF, the lower the transmission rate and the longer the range. Conversely, the lower the SF, the higher the transmission rate and the shorter the range.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 3.
Summary of LoRa modulation parameters.
| Parameter | Magnitude/Range | Chip | Reference |
|---|---|---|---|
| Frequency | 137–175 MHz | SX1276/77/78/79 | [33] |
| 410–525 MHz | SX1276/77/78/79 | [33] | |
| 862–1020 MHz | SX1276/77/79 | [33] | |
| 860–1020 MHz | SX1272/73 | [34] | |
| 410–810 MHz | SX1268 | [35] | |
| 150–960 MHz | SX1261/2 | [36] | |
| 2.4 GHz | SX1280/SX1281 | [37] | |
| Bandwidth (BW) | 7.8 kHz | SX1276/77/78/79, SX1268, SX1261/2 | [33,35,36] |
| 10.4 kHz | SX1276/77/78/79, SX1268, SX1261/2 | [33,35,36] | |
| 15.6 kHz | SX1276/77/78/79, SX1268, SX1261/2 | [33,35,36] | |
| 20.8 kHz | SX1276/77/78/79, SX1268, SX1261/2 | [33,35,36] | |
| 31.2 kHz | SX1276/77/78/79, SX1268, SX1261/2 | [33,35,36] | |
| 41.7 kHz | SX1276/77/78/79, SX1268, SX1261/2 | [33,35,36] | |
| 62.5 kHz | SX1276/77/78/79, SX1268, SX1261/2 | [33,35,36] | |
| 125 kHz | SX1276/77/78/79, SX1272/73, SX1268, SX1261/2 | [33,34,35,36] | |
| 250 kHz | SX1276/77/78/79, SX1272/73, SX1268, SX1261/2 | [33,34,35,36] | |
| 500 kHz | SX1276/77/78/79, SX1272/73, SX1268, SX1261/2 | [33,34,35,36] | |
| 203 kHz | SX1280/SX1281 | [37] | |
| 406 kHz | SX1280/SX1281 | [37] | |
| 812 kHz | SX1280/SX1281 | [37] | |
| 1625 kHz | SX1280/SX1281 | [37] | |
| Spreading Factor (SF) | 5 | SX1268, SX1261/2, SX1280/SX1281 | [35,36,37] |
| 6–9 | SX1276/77/78/79, SX1272/73, SX1268, SX1261/2, SX1280/SX1281 | [33,34,35,36,37] | |
| 10–12 | SX1276/78/79, SX1272, SX1268, SX1261/2, SX1280/SX1281 | [33,34,35,36,37] | |
| Coding Rate (CR) | 1 (4/5) | SX1276/77/78/79, SX1272/73, SX1268, SX1261/2, SX1280/SX1281 | [33,34,35,36,37] |
| 2 (4/6) | SX1276/77/78/79, SX1272/73, SX1268, SX1261/2, SX1280/SX1281 | [33,34,35,36,37] | |
| 3 (4/7) | SX1276/77/78/79, SX1272/73, SX1268, SX1261/2, SX1280/SX1281 | [33,34,35,36,37] | |
| 4 (4/8) | SX1276/77/78/79, SX1272/73, SX1268, SX1261/2, SX1280/SX1281 | [33,34,35,36,37] | |
| Transmission Power | −4 to 20 dBm | SX1276/77/78/79 | [33] |
| −1 to 20 dBm | SX1272/73 | [34] | |
| −17 to 22 dBm | SX1268 | [35] | |
| −17 to 22 dBm | SX1261/2 | [36] | |
| −18 to 12.5 dBm | SX1280/SX1281 | [37] |
2.1.2. LoRaWAN
LoRaWAN is an open network specification built on top of LoRa and developed to be used by battery-powered sensors that send data over long distances at low data rates [27]. It defines the system architecture of the network and its communication protocol.
- A.
- Architecture
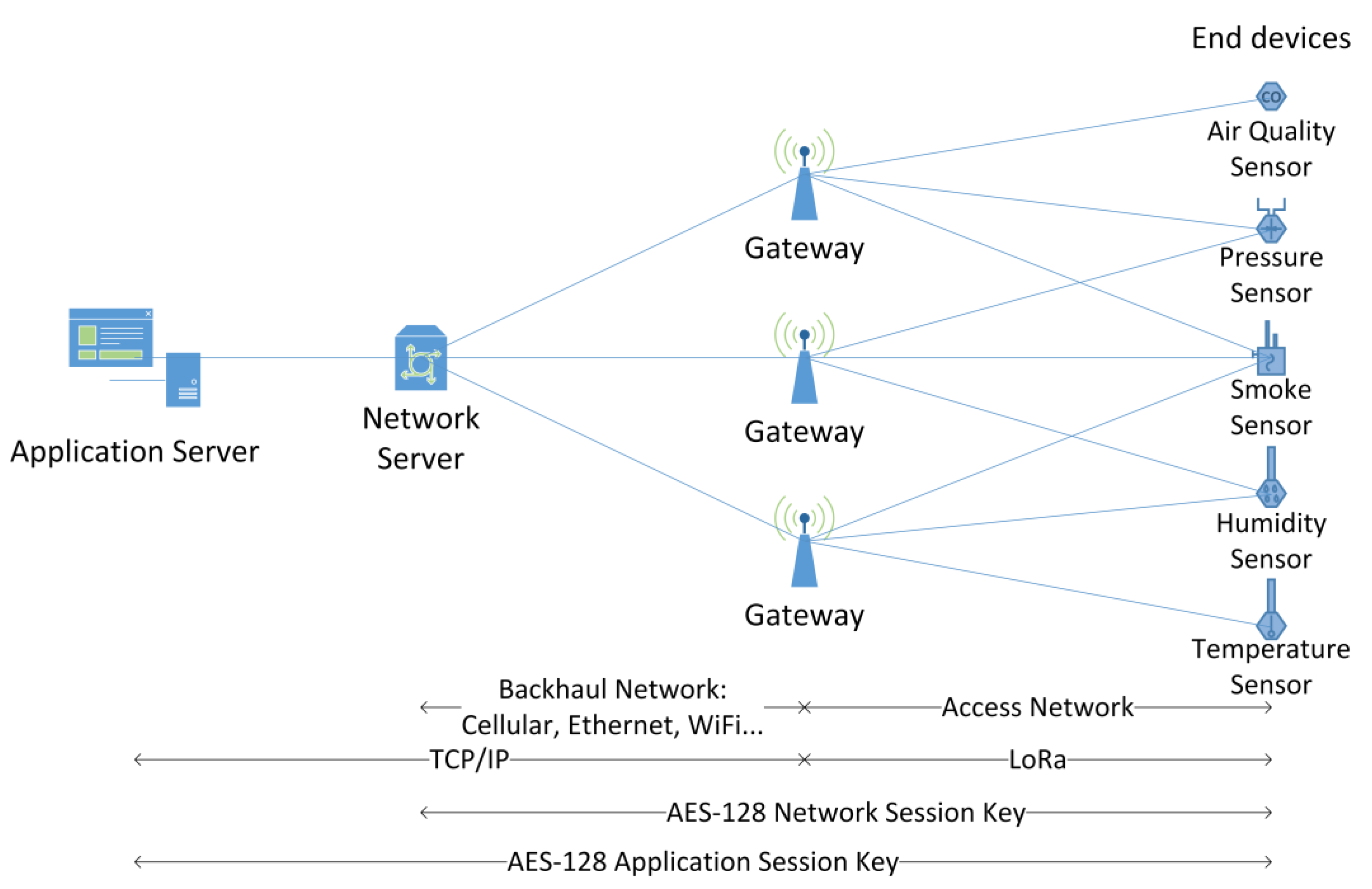
LoRaWAN defines a hierarchical network architecture with the following elements:
- End devices: Also called nodes; they are usually sensors, actuators, or both, equipped with LoRa transceivers that connect to one or more gateways in a single hop.
- Gateways: They connect the LoRa access network to any standard IP backhaul network to relay data between the end nodes and the network server.
- Network server: It is in charge of routing the data between the end device and the appropriate application server. It also handles network layer security by using AES-128 encryption to authenticate end devices.
- Application server: It manages the application to which the end device data is aimed. It processes the data, presents it to the user, and replies to the end device, if necessary. It also handles application layer security by using AES-128 encryption to keep the end user’s application data confidential to the network operator.
These network elements typically connect in a star-of-stars topology as shown in Figure 1.
- B.
- Communications
As mentioned before, the LoRaWAN specification establishes the use of LoRa at its physical layer [27]. Additionally, LoRaWAN describes MAC and application layers whose implementation depends to some extent on the end device’s class, which can be one of three classes as explained below:
- Class A: The end devices of this class are half-duplex transceivers that implement pure ALOHA for their uplink transmissions, meaning that they transmit when they need to do it, but only after a small random time has elapsed. The receiver remains off, except for two receive windows that open after an uplink transmission. This is the class with the lowest energy consumption, and all LoRaWAN end devices must implement it.
- Class B: This class is meant for applications in which the end device needs to download more traffic than Class A devices. End devices of this class employ all functionalities of Class A, but open additional reception windows (also called ping slots) in a scheduled manner. For these reception windows to work, synchronization is required, which is achieved by the gateway sending periodic beacons to all end nodes.
- Class C: End devices of this class listen continuously except when they are transmitting. As this is the class with the most energy consumption, it is meant for applications that are less power-constrained. End devices of this class also implement all functionalities of Class A but must not enable Class B concurrently.
The LoRaWAN specification also defines MAC frame formats. As with any protocol data unit, frame formats are intended to allow communication between peer elements in a layered network, for which they separate the protocol control information (overhead) from the payload, in a standardized way. The LoRaWAN frame, which is the payload for the LoRa physical layer, has three fields as shown in Figure 2. The first field is the MAC header (MHDR), which is 1 byte long and specifies the type of frame. The second field is the MAC Payload, whose length can range from 7 to M bytes, where the maximum size of M can reach up to 250 bytes and is calculated based on the maximum allowed LoRa transmission time [38]. Finally, the frame closes with a 4-byte message integrity code (MIC), which is calculated over all the fields in the frame.
Regarding control information, a series of MAC commands are used to exchange control information exclusively between the network server and the end devices. As all end devices join the network in Class A mode, Class B and Class C devices must implement all Class A MAC commands.
To be part of a LoRaWAN network, every end device must first be activated following one of the next two methods:
- Activation by Personalization: The information required by the end device to join a network is statically stored in it. This method is technically simpler, requires access to the end device, and is intended to be used mostly in private networks.
- Over-the-Air Activation: The end device initiates a join procedure by sending an unencrypted Join Request frame to the network server. If the Join Request is accepted, the server responds with an encrypted Join Accept frame. This method is dynamic and can be used in public or private networks.
2.2. Flying Ad Hoc Networks (FANETs)
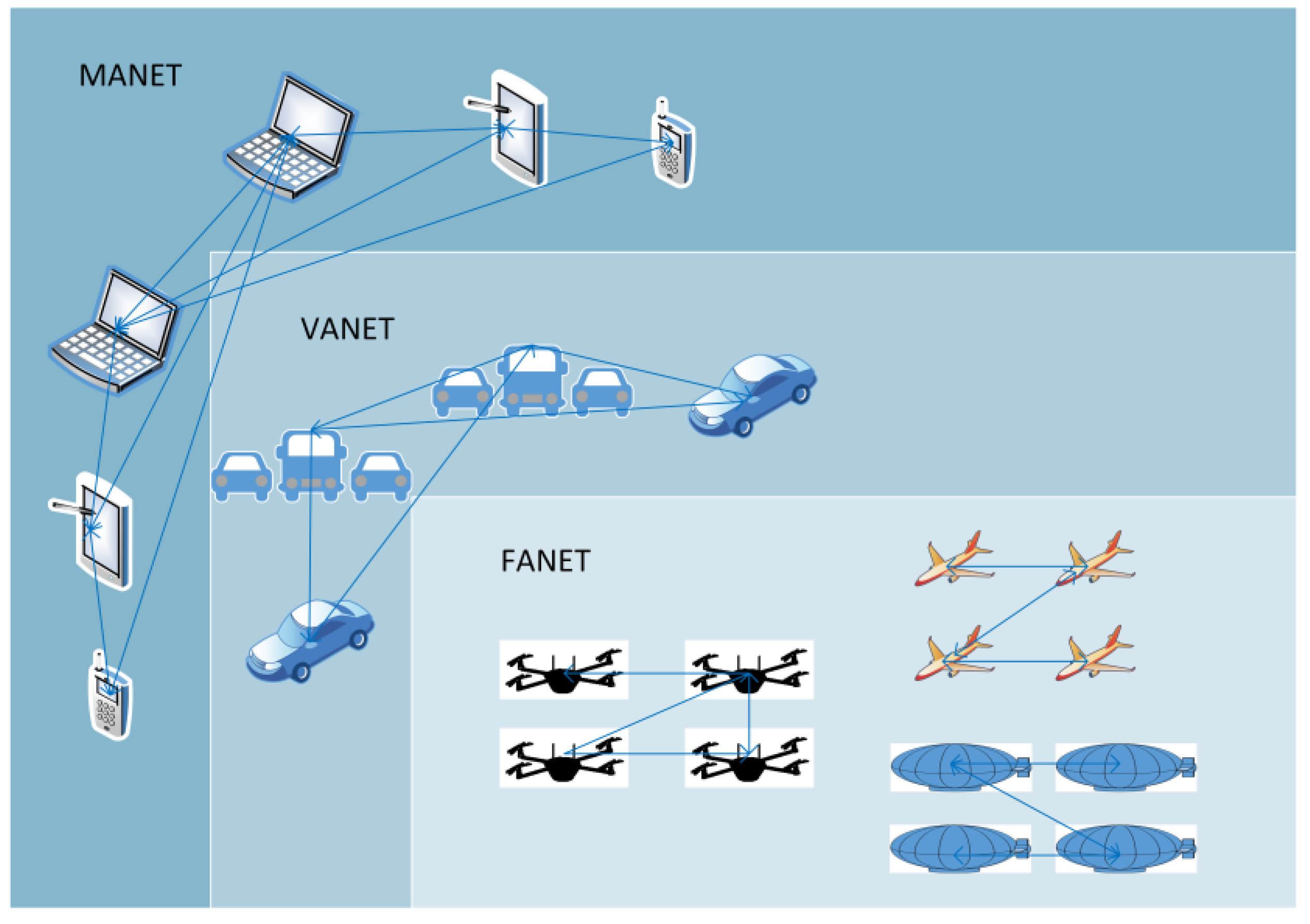
Although UAVs have been used in the military since World War I [39,40], it is not until recently that they have become widely available for civilian applications, such as 3D mapping, construction inspection, land surveying, oil exploration, agricultural monitoring, emergency response operations, surveillance, and asset management, to name a few. Many of these applications could benefit from using a swarm of drones instead of a single UAV, for which an ad hoc network could be established for communication and coordination. The authors of [41] consider FANETs as a subset of MANETs but not as a subset of Vehicular Ad Hoc Networks (VANETs), while others [42,43,44,45] also consider FANETs to be a subset of VANETs. Furthermore, Bekmezci et al. [44] define a FANET as a form of MANET made of multiple UAV nodes, where the communication between UAVs cannot rely on infrastructure-based links. The relationship between MANETs, VANETs, and FANETs is illustrated in Figure 3.
2.2.1. UAV Taxonomy
2.2.2. Differences between FANETs, VANETs, and MANETs
The differences between FANETs, VANETs, and MANETs are analyzed from different perspectives in [41,42,43,44,45] and presented in Table 5. The aforementioned works highlight the fact that FANETs have specific characteristics. Those specificities are summarized in the following fields:
- Node mobility: Contrary to the elements of MANETs and ground VANETs, UAVs experience relatively fewer obstacles, which allows them to move in and around three axes with a certain amount of freedom at somewhat constant speeds. However, holding a fixed position can be more challenging, or even impossible, depending on weather conditions and the type of UAV. These circumstances influence the mobility model to be applied but also impact other characteristics, such as node density, topology change rate, localization alternatives, and applicable propagation models.
- Radio propagation: The presence of fewer obstacles allows for the consideration of line-of-sight (LoS) propagation while taking into account weather conditions and the Doppler effect caused by the speed of UAVs relative to the ground and to one another. Air-to-air and air-to-ground are the two main types of links that can be identified, although air-to-satellite links might also be considered for some applications.
- Energy constraints: They depend on the type of UAV. Battery-powered UAVs are more energy-constrained, making it useful to have communication hardware that consumes less power, allowing for increased flight time, although most of the energy is dedicated to keeping the UAV and its payload in the air. Large fixed-wing UAVs are most likely powered by combustion engines that can carry and charge larger batteries, making them less energy-constrained.
Table 5.
Differences between FANET, VANET and MANET.
| Characteristic | MANET | VANET (Ground) | FANET |
|---|---|---|---|
| Elements [45] | Mobile phones [45] | Vehicles [45] | UAVs, airplanes [45], balloons, HAPs |
| Node speed [41,42,45] | 6 km/h [41,42] 0–1.5 m/s [45] | 20–130 km/h [41] 20–100 km/h [42] 4–36 m/s [45] | 6–460 km/h [41] 50–100 km/h [42] 8–257 m/s [45] |
| Node mobility [41,42,43,44] | Consistent, 2D, Random trajectories, Low [41] Lower (2D) [42] Relatively slow compared to VANET and FANET [44] | Consistent, 2D, Random trajectories, High [41] Low (2D) [42] | Free, 3D, Either random or predefined trajectories, very high [41] Medium to high (3D) [42] Faster than MANET and VANET [43] Much higher than MANET and VANET [44] |
| Node density [43,44,45] | Dense [45] | Dense in cities and sparse in rural areas [45] | Much lower than MANET and VANET [43,44] Mission-dependent [45] |
| Mobility model [41,42,43,44] | Random [42] Random Way Point (RWP) [44] | Manhattan Models [42] High predictability [44] | RWP, Paparazzi (PPRZM) [41,42] Predetermined, random [43] Predetermined, random, Semi-Random Circular Movement (SRCM), Pheromone map [44] |
| Topology change [41,42,43,44] | Dynamic, unpredictable [41] Low [42] | Linear movement but more progressive than VANET [41] Medium [42] | Stationary, Slow and Fast [41] High [42] More frequent than MANET or VANET and related to node mobility/availability [43] |
| Propagation model [41,42,43,44,45] | Non-Line-of-Sight (NLoS) [41,44] Rayleigh [45] | Non-Line-of-Sight (NLoS) [41,44] Rayleigh/Rician [45] | Line-of-Sight (LoS) [41,43,44] Friis, Rice, Log-Normal [42] Rayleigh/Rician [45] |
| Energy constraints [41,42,43,44,45] | Medium [41,42] Constraint [45] | Low [41,42] Non-constraint [45] | Medium to High [41,42] Low to High depending on the type of UAV [43] High for mini-UAVs [44] Constraint/ Non-constraint [45] |
| Computational power [41,44] | Limited [41,44] | High [41,44] | High [41,44] |
| Localization [41,43,44] | Global Positioning System (GPS) [41,44] | GPS/Assisted GPS (AGPS) [41,44] Differential GPS (DGPS) [44] | GPS/AGPS (Assisted Global Positioning System) [41,44] DGPS, Inertial Measurement Unit (IMU) [44] |
3. Critical Review
The critical review will be covered according to the identified challenges involved in a FANET implementation as stated in Section 1.3.
3.1. Communications
The communication challenges can be generally described under the conceptual framework of the Open Systems Interconnection (OSI) or TCP/IP layer models, while taking into consideration the mobility and energy constraints of FANETs. The PHY layer will be limited to LoRa and LoRaWAN, which are within the scope of this work.
3.1.1. Architecture
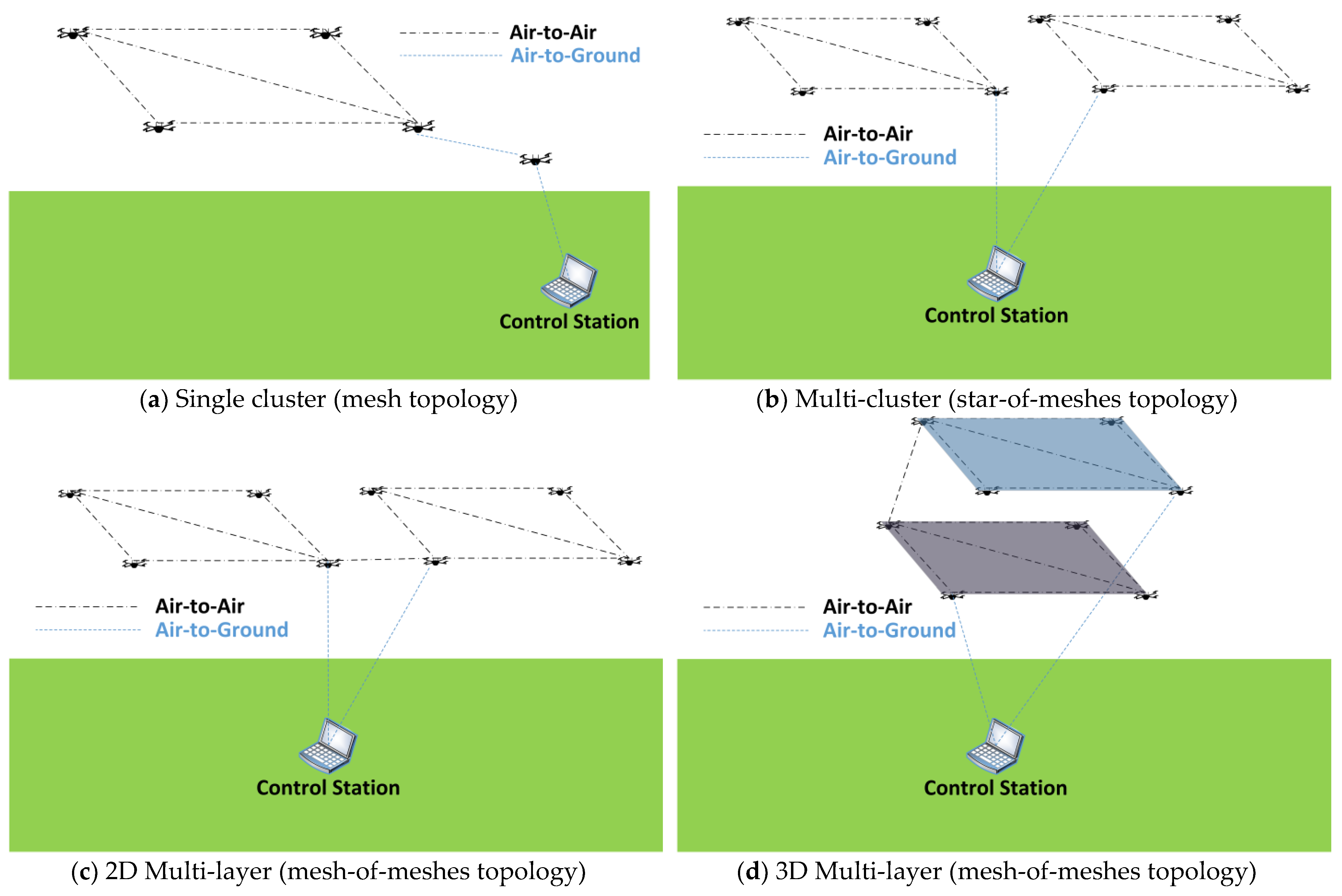
The communication architecture is highly dependent on the network application. First, a common ground for FANETs must be determined, and then, some architectures are exemplified to establish the types of applications on which they are employed. Single UAV architectures are not considered as FANETs because FANETs are composed of more than one UAV, and communication between UAVs cannot rely on infrastructure networks [44]. Moreover, this means that topologies can be mesh, star-of-meshes, or mesh-of-meshes.
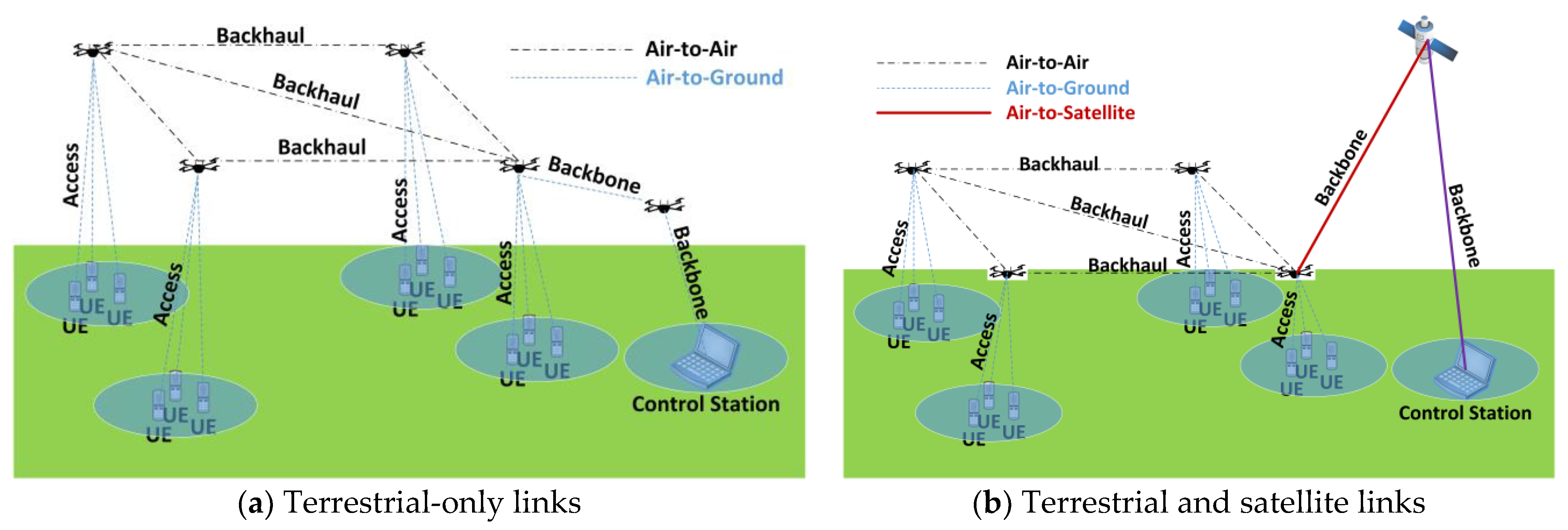
As mentioned in Section 2.2.2, three different types of links can be identified according to the locations of the elements they connect, namely air-to-air (UAV-to-UAV), air-to-ground (UAV-to-ground) and air-to-satellite (UAV-to-satellite). Links can also be classified according to the role they play from a communications network perspective: access links, backhaul links, and backbone links. The two mentioned classifications are illustrated in Figure 4.
Four UAV communication architectures are mentioned in [43], based on the type of infrastructure utilized: UAV direct communication, UAV communication via satellite networks, UAV communication via cellular networks, and UAV communication via ad hoc networks. However, these could be further summarized into communication through infrastructure and infrastructure-less communication; hence, only UAV communication via ad hoc networks corresponds to FANETs.
Three hierarchical architectures are described in [46,47], based on how the UAVs connect to each other and to a ground base station. The first architecture relies on a single UAV acting as a hub to connect a single group of UAVs to the base station. The second architecture involves clustering UAVs into groups, each one of them having one hub to connect to the base station. Finally, in the third architecture, multiple layers of UAV clusters connect to each other through one root UAV, and only one of the groups has a hub that connects all others to the base station. According to the description, UAV-to-UAV communication relies on low-power, short-range links, while UAV-to-ground communication does it on high-power, long-range links. These architectures could be employed in applications wherein compact swarms with longer UAV-to-ground ranges—when compared to UAV-to-UAV ranges—are needed. Moreover, having centralized links to the base station implies one or more of the following situations:
- Most communications take place inside the swarms.
- The communication with the base station is less frequent or takes place at low data rates.
- The UAV that handles the link to the base station is a single point of failure and may become a bottleneck.
To overcome the last issue, the authors of [48] propose a multi-layer architecture where clusters are grouped in layers and each cluster selects a UAV that acts as a hub to connect to the base station or to another layer, and a second UAV as a backup hub. The UAV clusters can be grouped two-dimensionally or in multiple layers in the three-dimensional space. A similar multi-layer approach is also presented in [49]. The architectures described in [46,47,48,49] can be synthesized by topology into the categories shown in Figure 5.
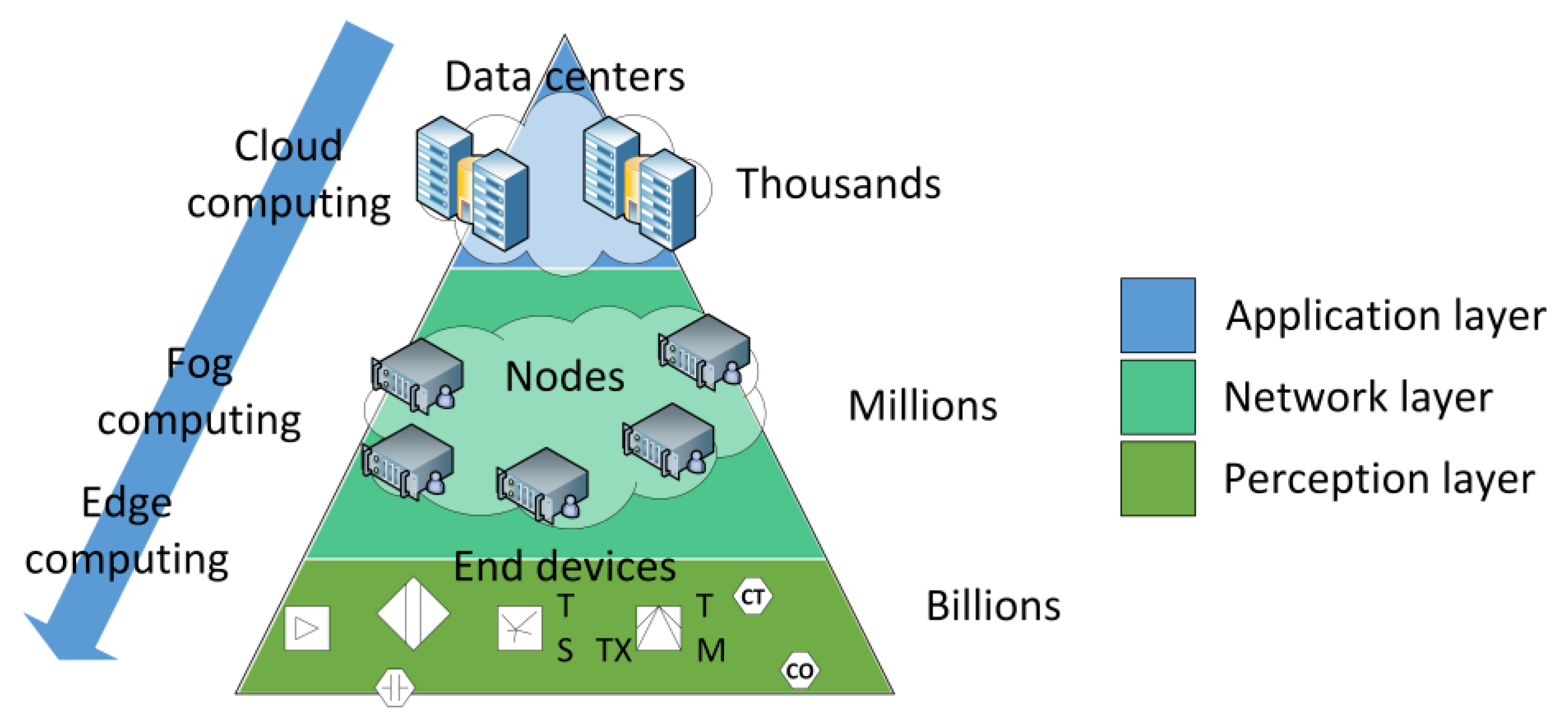
In the case of FANETs being a part of an IoT implementation, architectures can be local or cloud-based. When cloud infrastructure is involved, a superposition of the IoT three-layered architectural model [50] and the IoT-oriented cloud computing architecture can be useful to understand the FANET role. The IoT may present the need to have computing resources closer to the end devices, which has led to the coining of the terms edge computing and fog computing. Cloud, fog, and edge computing refer to the segment where the computations are performed with respect to the distance from the end node, as shown in Figure 6. Furthermore, the end device could be mounted on the ground or on the UAV, depending on the application. In both cases, the UAV becomes an edge computing enabler.
Regarding the use of LoRa or LoRaWAN, most works refer to UAV-aided wireless sensor networks (WSNs) with single or independent UAVs [51,52,53,54,55,56,57,58]. WSNs are sets of sensors that communicate with each other by forming an ad hoc network. By this definition, WSNs can be considered a subset of the IoT. However, even though WSNs and FANETs have a mesh nature in common, a WSN aided by a single UAV is not considered a FANET by the definition presented in Section 2.2.
A system called LoRaUAV is proposed in [59,60] aimed at providing coverage to mobile sensors during emergencies by deploying a mesh of LoRaWAN gateways mounted on UAVs. In this work, LoRaWAN is used as an access network for a fixed number of ground-mobile sensors, while UAVs relay information through a Wi-Fi mesh network to a base station. In this architecture, the LoRaWAN access network range is longer than that of the Wi-Fi mesh backhaul.
The feasibility of a hybrid architecture made of LoRa and IEEE 802.11 s overlaid mesh networks is analyzed in [61], where LoRa and LoRaWAN are proposed for long-range-low-data-rate communications and IEEE 802.11 s for short-to-mid-range-high-data-rate communications. A hierarchical tree of multi-layer meshes is suggested, where a smart selection mechanism switches between IEEE 802.11 s and pure LoRa for UAV-to-UAV communications, and between IEEE 802.11 s and LoRaWAN for UAV-to-ground communications. The proposed architecture is aimed at being a general approach for a wide range of UAV-based scenarios, where, given its mobility and radio propagation conditions, a combination of long-range-low-data-rate and short-range-high-data-rate protocols might be convenient.
A single-cluster mesh is the system topology presented in [62]. The network has sensor nodes, relay nodes (mounted on UAVs), and a gateway on the ground, where the gateway operates as the root node of the mesh network, providing the air-to-ground backbone link.
A summary of the literature findings regarding proposed architectures and their applications is shown in Table 6.
3.1.2. Medium Access Control
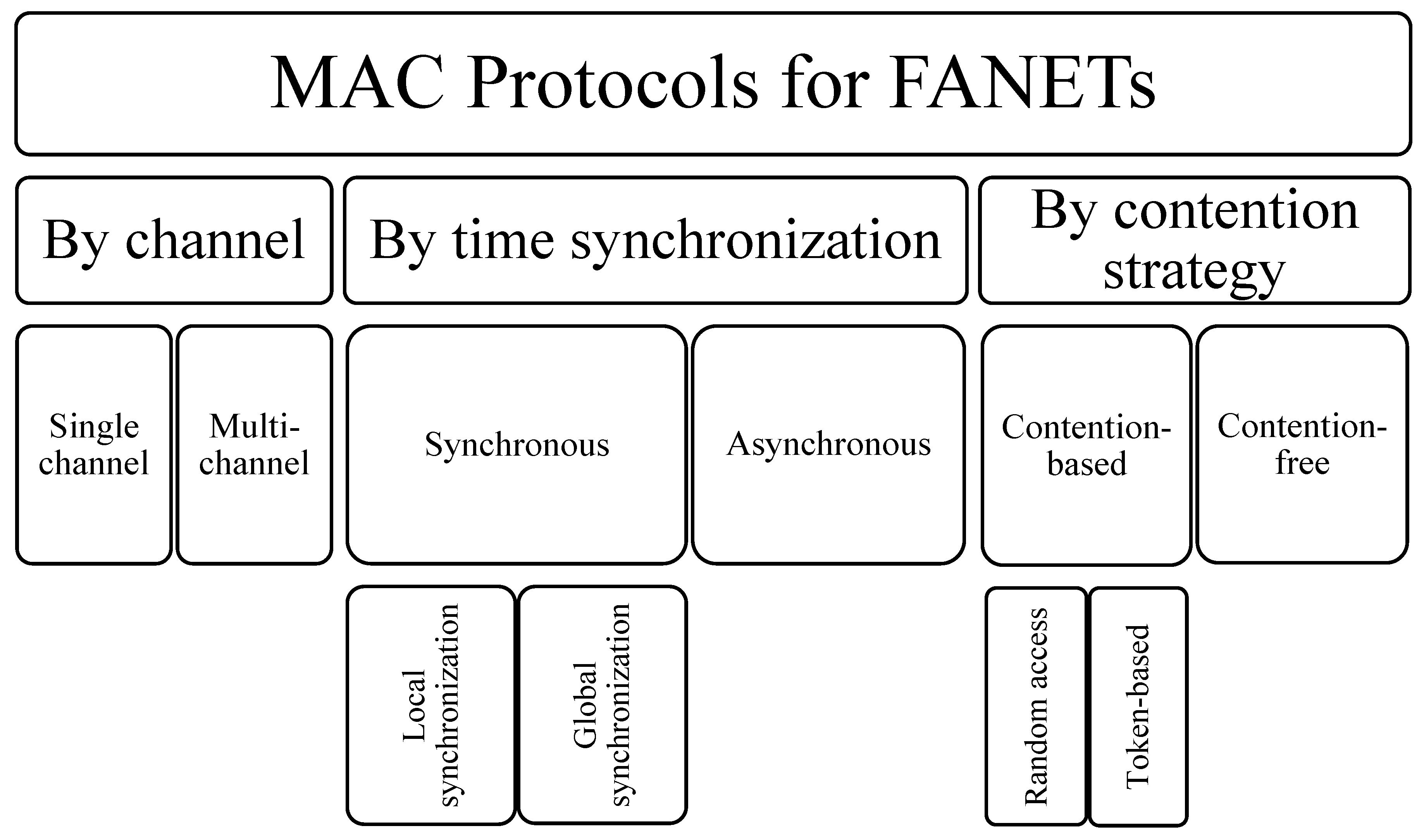
MAC protocols coordinate access to a shared medium with the purpose of avoiding collisions in an efficient, fair, and timely manner. As with all other topics pertaining to FANET communication, MAC protocols must be chosen or designed to fulfill their goal while considering the corresponding mobility characteristics and energy restrictions of FANETs. A classification of MAC protocols can be helpful in deciding which one to use for a particular application; however, this can be a demanding task because of the many parameters that can be used to characterize them [64]. A taxonomy of MAC protocols for WSNs is presented in [65], where four condensed categories are discussed: asynchronous, synchronous, frame-slotted, and multi-channel. A classification of multi-channel MAC protocols for low-power and lossy networks is proposed in [64], with five main categories defined by channel assignment scheme, medium access strategy, way of interaction with upper layers, MAC layer coordination, and physical layer management. The authors of [66] present a taxonomy of MAC protocols for FANETs with three main categories based on their channel access strategy: contention-based, contention-free, and hybrid. An analysis of MAC protocols for the IoT along with MAC protocols for UAV networks is performed in [67], where the authors also present a classification of MAC protocols for a UAV-based IoT (UIoT) with three categories: contention-based, contention-free, and based on artificial intelligence (AI-based). Starting from these classifications and expanding the summarized categories, a taxonomy of MAC protocols for FANETs is presented in Figure 7.
As seen in Table 6, the works presented in [59,60,61,62,63] consider the use of LoRa or LoRaWAN as part of a multi-UAV solution that involves FANET communication. Moreover, only [61,62,63] consider the use of LoRa at the heart of the FANET, i.e., on the air-to-air links. Therefore, only the last three works propose the use of MAC protocols different than that of LoRaWAN. A summary of the MAC protocols used in FANETs that involve LoRa or LoRaWAN is shown in Table 7.
In order to achieve mesh networking using LoRa, a packet structure and a Time Division Multiple Access (TDMA) scheduling are proposed in [61]. The proposed packet structure includes fields for node identification, node positioning, and mesh configuration data, intended for mesh setup and update. Regarding performance evaluation, the authors present a theoretical analysis of the operating range of both LoRa and IEEE 802.11 s. Also, a simple experimental analysis of the LoRaWAN operating range is performed for UAV-to-ground communications.
Carrier Sense Multiple Access with Collision Avoidance (CSMA/CA) and a customized form of Destination Sequenced Distance Vector (DSDV) routing protocol are assessed in [63] to achieve a decentralized mesh network of flying drones. Two-hop performance is assessed experimentally in terms of channel usage, packet delivery rate, route construction time, and delay.
3.1.3. Routing
There are countless routing protocols and different ways to classify them depending on the context in which they are applied. Various routing schemes for FANETs can be found in [41,43,46,48,68,69,70,71,72,73,74]. A taxonomy of FANET routing protocols is presented in [46], where they are categorized into static, proactive, reactive, hybrid (proactive and reactive), geographic (position-based), and hierarchical. A similar classification is performed in [43], with the difference that it does not include hierarchical routing protocols as a category. Additionally, thorough taxonomies—which reach up to four levels in depth—are provided in [41,70,71,72], where additional categories such as bio-inspired routing, swarm-based routing, and machine-learning-based routing are worth mentioning.
Regarding the use of LoRa or LoRaWAN in FANETs, the same observation made in Section 3.1.2 applies to the present section, with the additional consideration that LoRaWAN does not incorporate routing within its network architecture. The routing approaches presented in [59,60,61,62,63] are discussed next and summarized in Table 8.
Although LoRa is not part of the air-to-air links in [59,60], Optimized Link State Routing (OLSR) is the protocol used within the proposed Wi-Fi mesh network. According to the authors, the mobility mechanism requires knowledge of the full network topology, which is the main consideration behind this decision.
The Hybrid Wireless Mesh Protocol (HWMP)—which is the default routing protocol for 802.11 s—is mentioned as the routing protocol for the Wi-Fi mesh network in [61], while no routing protocols are mentioned for its use with LoRa. A GPS-based directed flooding approach is proposed in [62] as the routing protocol, where an experimental test with one relay node and two sensor nodes (2 hops) is performed.
The authors of [75] propose an improvement to 802.11 s routing metrics for its use in the deployment of FANETs. Claiming that HWMP was not conceived for FANET mobility, this work presents two new routing metrics aimed at improving network performance in terms of throughput and end-to-end delay. More specifically, the first metric is based on modifications to the default frame error rate and link time usage calculations to improve performance for stationary nodes. The second metric adds a factor based on the Received Signal Strength Indicator (RSSI) of a wireless link, increasing its cost when the fade margin falls below a certain threshold.
3.2. Mobility
Transportation and communication problems are analogous in many ways. In fact, many terms used in communications—such as packet or collision—come from the postal or transportation worlds. This analogy gives us a sense of the importance of addressing the mobility problem in FANETs. Moreover, mobility can be seen as an opportunity instead of a problem, where nodes can move and reposition themselves to reconfigure a network or to recover connectivity. In this section, the FANET mobility issue is broken down into mobility objectives and mobility models.
3.2.1. Mobility Objectives
The mobility objectives can be described as optimization problems that are dependent on various factors such as application, environmental conditions, and available resources. Optimization can be performed in the following ways:
- Optimal positioning: Where to go and why.
- Optimal trajectory determination: How to get there and why.
- Optimal agent selection: Which UAVs should get there and why.
Regardless of the specific application, a common requirement for FANETs is to maximize network uptime, in the literal and figurative senses of the expression.
3.2.2. Mobility Models
Mobility models can be used to model movement for FANET simulation and to achieve mobility optimization goals in practical implementations. Four mobility models for FANETs are surveyed in [76]: Random Way Point, Gauss-Markov, Semi-random Circular Movement, and Mission Plan Based. The same models are reviewed in [43,68], with the addition of the Pheromone-Based, Paparazzi, and Particle Swarm Mobility Models. Furthermore, a taxonomy of mobility models with five categories is provided in [41], namely, random-based, time-based, path-based, group-based, and topology-based.
Reference Point Group Mobility (RPGM) is used as the mobility model for performance evaluations in [75], which are carried out through simulations in Network Simulator (NS)-3. These simulations show that the inclusion of an RSSI-based factor results in an improvement in network throughput and a decrease in the number of route changes, with little to no impact on end-to-end delay, especially for a mobile scenario.
An algorithm to find the optimal position of a UAV-mounted relay node is presented in [77] to maximize the throughput between any pair of fixed ground nodes within a wireless mesh network. To achieve this, nodes—whose positions are known—are first clustered in a way such that nodes that connect within a certain RSSI margin are part of the same cluster. Then, the placement optimization is performed by separating the positioning problem into horizontal and vertical placement and iterating between the two. For the horizontal placement, clusters are considered single entities around their center of gravity, and the UAV is positioned to maximize throughput—as a function of signal-to-noise ratio—for the worst wireless link. Subsequently, vertical positioning is determined to maximize throughput in the same manner. Because this work focuses on static mesh networks, routing is done by means of an optimized link state routing protocol (OLSRD). Simulations for up to 20 ground nodes are implemented using a 3D map. Also, an experimental performance assessment is presented with four ground nodes separated into two clusters of two nodes each.
Concerning mobility models in FANETs that use LoRa, a Connection Recovery and Maintenance (CRM) algorithm is proposed in [59,60], where a two-dimensional mobility problem is divided into four mobility modes. A Virtual Spring Force (VSF) mobility algorithm is used to handle proximity between nodes to avoid collisions and to maintain distance within communications range. Correspondingly, if the forces are in balance, the UAV goes into stationary mode. Then, if a path to the base station is lost, the UAV goes into network recovery mode, where it moves in the direction of the base station; and, if the connection is lost with a ground node, movement prediction is used alongside the spring force mobility to try to reestablish it, based on the ground node’s last known position, direction, and speed.
3.3. Energy
Considering that large fixed-wing UAVs are less energy-constrained, this section focuses on FANETs comprised of battery-powered UAVs. In energy-constrained FANETs, energy consumption efficiency may be achieved by taking one or more of the following measures [78]:
- Reducing UAV and payload weight.
- Increasing aerodynamic efficiency.
- Improving communication protocols, or selecting them, for reduced energy consumption.
- Optimizing motion to reduce energy consumption.
Even though they do not necessarily increase energy consumption efficiency, in-air energy replenishment procedures might be considered to maximize flight time, such as the use of solar panels or the implementation of radio energy harvesting.
Battery-powered UAVs are constituted by many active communication and mobility elements, e.g., radio transceivers, Global Navigation Satellite System (GNSS) units, flight controllers, motors, cameras, and other sensors. Although a lot of work focuses on developing energy-efficient MAC and routing protocols [79,80,81,82,83,84,85,86,87], the energy required for mobility is much higher than the energy required for communications [88]. To exemplify the last statement, a conservative energy consumption calculation is shown in Table 9 for a hybrid LoRa/Wi-Fi UAV network node, assuming that the transmitters work continuously at maximum power during a 30-min flight.
The payload weight and the percentage of energy dedicated to communications can be reduced if the control hardware includes a Wi-Fi transceiver, which is the case with the Raspberry Pi, as well as with many other single board computers (SBC) and system-on-a-chip microcontrollers. This information suggests that it might be more significant to focus on taking measures to optimize energy consumption from the mobility perspective. From the communications standpoint, this means that efforts should be focused on the reduction of the weight and size of its components, something that is already being done.
Regarding the use of mechanisms to collect energy during flight, the performance of radio frequency (RF) energy harvesting in a UAV Relay Assisted IoT Communication Network is assessed in [93]. In this study, time division and power splitting schemes are implemented to perform communications reception, transmission, and energy harvesting. The system assessment is done through simulation, using communications metrics like system throughput, outage probability (availability), and bit error rate (BER). Although no information is provided regarding the amount of energy collected or saved, it can be inferred that the system aims at reducing the transmission power of IoT sensors, which, as mentioned earlier, might not have a significant impact on increasing UAV flight time. A similar conclusion can be drawn from [94]. On the other hand, a solar energy-harvesting model is proposed in [95] to power small UAVs, where analytical results show possible flight time improvements in the range of 3 to 50 min, depending on the flight conditions.
4. Discussion on Findings and Open Issues
The systematic literature review shows that LoRa is mostly used in single UAV architectures for WSNs [51,52,53,54,55,56,57,58]. A few works have considered LoRa or LoRaWAN as part of a FANET implementation using hybrid architectures combined with Wi-Fi [59,60,61], whereas some other works have explored the application of MAC and routing protocols to extend the use of LoRa to a UAV mesh network [62,63]. This might be attributed in part to the fact that an accurate assessment of network performance requires a multidisciplinary implementation of mobility models and complete network stack implementation, even if simplified or abstracted. The rest of the findings and open issues are addressed in accordance with communication, mobility, and energy aspects. Additionally, Table 10 presents a comparison of FANET-related characteristics between LoRa/LoRaWAN, Wi-Fi, and cellular LPWANs.
4.1. Communications
Regardless of LoRa data rate limitations, its communication range can be exploited for applications that require maximum distance between UAVs. Using LoRa as a FANET access network might limit applications to WSN or flight control, considering that LoRa devices are not as extended among end users as those of other types of communication. Therefore, a hybrid network could be more convenient for human-oriented communications, in applications such as localization, short messaging, or search and rescue operations, where the access network should be of widespread use, such as Wi-Fi or cellular. For future research, it will be important to test the maximum communication ranges at the maximum data rate available for the latest LoRa chips in the 2.4 GHz band, which might enable some real-time applications.
As mentioned in Section 3.3, efforts in communications improvement could be aimed at reducing equipment weight and improving air-to-air range, rather than at reducing energy consumption at the expense of network performance. The same consideration applies to network security, where the issues are the same as those of any wireless network, with the exception that the communications equipment could potentially be accessed by anyone that has the UAVs within sight. There is room for developing communication protocols at the physical layer to find a better balance between data rate and communications range, without having to compromise energy consumption excessively.
4.2. Mobility
It is essential to handle the mobility of UAVs, as it has a direct impact on FANETs’ communication and energy performance. Mobility models where each UAV moves independently do not seem appropriate for FANETs. On the contrary, group mobility models appear more useful, since network information such as position or received signal power can be shared among multiple nodes. With respect to network stability, mobility plays a crucial role in network reconfiguration, considering that a node can reposition itself to maintain or recover a link. In this case, energy consumption should be considered, but it can be achieved efficiently by keeping in mind that the received power is exponentially and inversely proportional to the distance between nodes, meaning that a small, distance-closing movement can result in the recovery of a link. Hence, mobility models that keep a record of their current, past, or best positions can also be applicable in this context.
The mobility optimization problems must be comprised of more than one objective; namely, the preservation of communications performance indicators such as received signal power or signal-to-noise ratio for air-to-ground and air-to-air links, as well as energy consumption minimization. Additionally, it is necessary to handle network handover between UAVs when they need to be replaced.
Apart from the study in [59,60], related works that involve LoRa do not consider mobility. Again, to assess the impact of mobility models on communications performance, simulations require complete network stack implementation, while real experiments require a swarm of drones with communication equipment.
4.3. Energy
Concerning energy consumption, reducing UAV and payload weight seems to be more significant than coming up with communication protocols for improved energy efficiency.
Regarding in-flight energy collection mechanisms, radio energy harvesting may gather enough energy to charge a sensor battery, but it does not generate enough energy to charge a drone considerably. However, solar panels can be an alternative as long as they do not increase UAV weight beyond efficient levels.
5. Conclusions
This work has presented a review of LoRa and its usage in the context of Flying Ad Hoc Networks. FANETs have a wide range of potential applications, wherein one of the main design considerations is to find a balance between data rate, communications range, mobility, and energy consumption. Studying this type of network is challenging because the communications, mobility, and energy dimensions must be evaluated concurrently to obtain accurate and significant results. Consequently, end-to-end simulations require full network stack implementation, while practical experiments require a swarm of drones. Though not much research work has been conducted on using LoRa as a mesh backhaul for air-to-air links, this technology can be useful to maximize the communications range between UAVs in low-data-rate applications such as WSN, remote control, flight coordination, or drone identification. Furthermore, the use of hybrid architectures, in which LoRa is combined with more ubiquitous and higher-data-rate technologies, expands its usefulness to applications such as search and rescue as well as short messaging. There is also room for developing communication protocols at the physical layer to achieve increased data rates (when compared to LoRa) while maintaining a long communication range. This means that energy utilization would be increased, but as LoRa is at the lower end of energy consumption, an increase could be possible without affecting UAV flight time considerably. Regarding communication protocols above the physical layer, routing must respond to the topology changes associated with a highly mobile network to avoid unnecessary UAV movement. At the same time, mobility algorithms must optimize positioning, trajectory, and UAV selection, with the purpose of maximizing flight time and network performance while minimizing energy consumption. Finally, the energy harvesting mechanisms must be developed and selected in such a way that they do not affect drone mobility.
Author Contributions
Conceptualization, W.D.P. and H.K.; methodology, W.D.P. and H.K.; validation, W.D.P., H.K., I.V. and Z.P.; formal analysis, W.D.P. and H.K.; investigation, W.D.P.; resources, W.D.P.; data curation, W.D.P.; writing—original draft preparation, W.D.P.; writing—review and editing, H.K., I.V. and Z.P.; visualization, W.D.P., H.K., I.V. and Z.P.; supervision, H.K.; project administration, H.K.; funding acquisition, H.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data is contained within the article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Rappaport, T.S. The wireless revolution. IEEE Commun. Mag. 1991, 29, 52–71. Available online: https://ieeexplore.ieee.org/document/109666 (accessed on 2 September 2022). [CrossRef]
- George, T.D. Enabling the wireless revolution. In Proceedings of the 1993 International Symposium on VLSI Technology, Systems, and Applications, Taipei, Taiwan, 12–14 May 1993; p. 7. [Google Scholar]
- Gazis, V.; Görtz, M.; Huber, M.; Leonardi, A.; Mathioudakis, K.; Wiesmaier, A.; Zeiger, F.; Vasilomanolakis, E. A survey of technologies for the internet of things. In Proceedings of the 2015 International Wireless Communications and Mobile Computing Conference (IWCMC), Dubrovnik, Croatia, 24–28 August 2015; pp. 1090–1095. [Google Scholar]
- Firouzi, F.; Farahani, B.; Weinberger, M.; DePace, G.; Aliee, F.S. IoT Fundamentals: Definitions, Architectures, Challenges, and Promises. In Intelligent Internet of Things: From Device to Fog and Cloud; Firouzi, F., Chakrabarty, K., Nassif, S., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 3–50. [Google Scholar]
- Ansere, J.A.; Han, G.; Liu, L.; Peng, Y.; Kamal, M. Optimal Resource Allocation in Energy-Efficient Internet-of-Things Networks with Imperfect CSI. IEEE Internet Things J. 2020, 7, 5401–5411. [Google Scholar] [CrossRef]
- Johnson, D.B. Routing in Ad Hoc Networks of Mobile Hosts. In Proceedings of the 1994 First Workshop on Mobile Computing Systems and Applications, Santa Cruz, CA, USA, 8–9 December 1994; pp. 158–163. [Google Scholar]
- Tavli, B.; Heinzelman, W. Introduction. In Mobile Ad Hoc Networks; Tavli, B., Heinzelman, W., Eds.; Springer: Dordrecht, The Netherlands, 2006; pp. 1–8. [Google Scholar]
- Čolaković, A.; Hadžialić, M. Internet of Things (IoT): A review of enabling technologies, challenges, and open research issues. Comput. Netw. 2018, 144, 17–39. Available online: https://www.sciencedirect.com/science/article/pii/S1389128618305243 (accessed on 2 September 2022). [CrossRef]
- Fraccaroli, E.; Quaglia, D. Engineering IoT Networks. In Intelligent Internet of Things: From Device to Fog and Cloud; Firouzi, F., Chakrabarty, K., Nassif, S., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 97–171. [Google Scholar]
- Adelantado, F.; Vilajosana, X.; Tuset-Peiro, P.; Martinez, B.; Melia-Segui, J.; Watteyne, T. Understanding the Limits of LoRaWAN. IEEE Commun. Mag. 2017, 55, 34–40. [Google Scholar] [CrossRef] [Green Version]
- Aggarwal, S.; Nasipuri, A. Survey and Performance Study of Emerging LPWAN Technologies for IoT Applications. In Proceedings of the 2019 IEEE 16th International Conference on Smart Cities: Improving Quality of Life Using ICT & IoT and AI (HONET-ICT), Charlotte, NC, USA, 6–9 October 2019; p. 69. [Google Scholar]
- Ghazali, M.H.M.; Teoh, K.; Rahiman, W. A Systematic Review of Real-Time Deployments of UAV-Based LoRa Communication Network. IEEE Access 2021, 9, 124817–124830. [Google Scholar] [CrossRef]
- Sundaram, J.P.S.; Du, W.; Zhao, Z. A Survey on LoRa Networking: Research Problems, Current Solutions, and Open Issues. IEEE Commun. Surv. Tutor. 2020, 22, 371–388. [Google Scholar] [CrossRef] [Green Version]
- Centelles, R.P.; Freitag, F.; Meseguer, R.; Navarro, L. Beyond the Star of Stars: An Introduction to Multihop and Mesh for LoRa and LoRaWAN. IEEE Pervasive Comput. 2021, 20, 63–72. [Google Scholar] [CrossRef]
- Tran, H.P.; Jung, W.; Yoo, D.; Oh, H. Design and Implementation of a Multi-Hop Real-Time LoRa Protocol for Dynamic LoRa Networks. Sensors 2022, 22, 3518. [Google Scholar] [CrossRef]
- Berto, R.; Napoletano, P.; Savi, M. A LoRa-Based Mesh Network for Peer-to-Peer Long-Range Communication. Sensors 2021, 21, 4314. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, L.; Liang, J.; Chai, J.; Lei, X.; Zhang, H. High-Performance Long Range-Based Medium Access Control Layer Protocol. Electronics 2020, 9, 1273. [Google Scholar] [CrossRef]
- Macaraeg, K.C.V.G.; Hilario, C.A.G.; Ambatali, C.D.C. LoRa-based Mesh Network for Off-grid Emergency Communications. In Proceedings of the 2020 IEEE Global Humanitarian Technology Conference (GHTC), Seattle, WA, USA, 29 October–1 November 2020; pp. 1–4. [Google Scholar]
- de Farias Medeiros, D.; Villarim, M.R.; de Carvalho, F.B.S.; de Souza, C.P. Implementation and Analysis of Routing Protocols for LoRa Wireless Mesh Networks. In Proceedings of the 2020 11th IEEE Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 4–7 November 2020; p. 20. [Google Scholar]
- Chache, F.M.; Maxon, S.; Narayanan, R.M.; Bharadwaj, R. QoS Extension to a B.A.T.M.A.N. based LoRa Mesh Network. In Proceedings of the MILCOM 2021–2021 IEEE Military Communications Conference (MILCOM), San Diego, CA, USA, 29 November–2 December 2021; pp. 43–48. [Google Scholar]
- Almeida, N.C.; Rolle, R.P.; Godoy, E.P.; Ferrari, P.; Sisinni, E. Proposal of a Hybrid LoRa Mesh/LoRaWAN Network. In Proceedings of the 2020 IEEE International Workshop on Metrology for Industry 4.0 & IoT, Roma, Italy, 3–5 June 2020; pp. 702–707. [Google Scholar]
- Pham, V.D.; Kisel, V.; Kirichek, R.; Koucheryavy, A.; Shestakov, A. Evaluation of A Mesh Network based on LoRa Technology. In Proceedings of the 2022 24th International Conference on Advanced Communication Technology (ICACT), Pyeongchang, Republic of Korea, 13–16 February 2022; pp. 1280–1285. [Google Scholar]
- Lundell, D.; Hedberg, A.; Nyberg, C.; Fitzgerald, E. A Routing Protocol for LoRA Mesh Networks. In Proceedings of the 2018 IEEE 19th International Symposium on “A World of Wireless, Mobile and Multimedia Networks” (WoWMoM), Chania, Greece, 12–15 June 2018; pp. 14–19. [Google Scholar]
- Lalle, Y.; Fourati, M.; Fourati, L.C.; Barraca, J.P. Routing Strategies for LoRaWAN Multi-Hop Networks: A Survey and an SDN-Based Solution for Smart Water Grid. IEEE Access 2021, 9, 168624–168647. [Google Scholar] [CrossRef]
- Diaz Zayas, A.; Merino, P. The 3GPP NB-IoT system architecture for the Internet of Things. In Proceedings of the 2017 IEEE International Conference on Communications Workshops (ICC Workshops), Paris, France, 21–25 May 2017; pp. 277–282. [Google Scholar]
- 3GPP Releases. Available online: https://www.3gpp.org/specifications/releases (accessed on 2 September 2022).
- LoRaWAN L2 1.0.4 Specification. Available online: https://resources.lora-alliance.org/technical-specifications/ts001-1-0-4-lorawan-l2-1-0-4-specification (accessed on 26 August 2022).
- Lopez, V.H. Performance Evaluation of Long Range (LoRa) Wireless RF Technology for the Internet of Things (IoT) Using Dragino LoRa at 915 MHz. Master’s Thesis, University of North Florida, Jacksonville, FL, USA, 2020. [Google Scholar]
- Saari, M.; bin Baharudin, A.M.; Sillberg, P.; Hyrynsalmi, S.; Yan, W. LoRa—A survey of recent research trends. In Proceedings of the 2018 41st International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 21–25 May 2018; p. 872. [Google Scholar]
- Gkotsiopoulos, P.; Zorbas, D.; Douligeris, C. Performance Determinants in LoRa Networks: A Literature Review. IEEE Commun. Surv. Tutor. 2021, 23, 1721–1758. [Google Scholar] [CrossRef]
- AN1200.22 LoRa Modulation Basics. Available online: https://www.semtech.com/products/wireless-rf/lora-connect/sx1276#documentation (accessed on 2 September 2022).
- LoRa Connect. Available online: https://www.semtech.com/products/wireless-rf/lora-connect#resources (accessed on 2 September 2022).
- SX1276/77/78/79 Datasheet. Available online: https://www.semtech.com/products/wireless-rf/lora-connect/sx1276#documentation (accessed on 2 September 2022).
- SX1272/73 Datasheet. Available online: https://www.semtech.com/products/wireless-rf/lora-connect/sx1272#documentation (accessed on 2 September 2022).
- SX1268 Long Range, Low Power, Sub-GHz RF Transceiver Datasheet. Available online: https://www.semtech.com/products/wireless-rf/lora-connect/sx1268#documentation (accessed on 2 September 2022).
- SX1261/2 Long Range, Low Power, Sub-GHz RF Transceiver Datasheet. Available online: https://www.semtech.com/products/wireless-rf/lora-connect/sx1261#documentation (accessed on 2 September 2022).
- SX1280/SX1281 Datasheet. Available online: https://www.semtech.com/products/wireless-rf/lora-connect/sx1280#documentation (accessed on 16 September 2022).
- LoRaWAN Regional Parameters. Available online: https://resources.lora-alliance.org/technical-specifications/rp002-1-0-0-lorawan-regional-parameters (accessed on 27 September 2022).
- Cook, K.L.B. The Silent Force Multiplier: The History and Role of UAVs in Warfare. In Proceedings of the 2007 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2007; pp. 1–7. [Google Scholar]
- Keane, J.F.; Carr, S.S. A Brief History of Early Unmanned Aircraft. Johns Hopkins APL Tech. Dig. 2013, 32, 558–571. Available online: https://www.jhuapl.edu/TechDigest/Detail?Journal=J&VolumeID=32&IssueID=3 (accessed on 2 September 2022).
- Srivastava, A.; Prakash, J. Future FANET with application and enabling techniques: Anatomization and sustainability issues. Comput. Sci. Rev. 2021, 39, 100359. [Google Scholar] [CrossRef]
- Guillen-Perez, A.; Cano, M. Flying Ad Hoc Networks: A New Domain for Network Communications. Sensors 2018, 18, 3571. [Google Scholar] [CrossRef] [Green Version]
- Chriki, A.; Touati, H.; Snoussi, H.; Kamoun, F. FANET: Communication, mobility models and security issues. Comput. Netw. 2019, 163, 106877. [Google Scholar] [CrossRef]
- Bekmezci, İ.; Sahingoz, O.K.; Temel, Ş. Flying Ad-Hoc Networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Wang, J.; Jiang, C. Introduction of Flying Ad Hoc Networks. In Flying Ad Hoc Networks; Shen, X.S., Ed.; Springer: Singapore, 2022. [Google Scholar]
- Khan, M.A.; Safi, A.; Qureshi, I.M.; Khan, I.U. Flying ad-hoc networks (FANETs): A review of communication architectures, and routing protocols. In Proceedings of the 2017 First International Conference on Latest trends in Electrical Engineering and Computing Technologies (INTELLECT), Karachi, Pakistan, 15–16 November 2017; pp. 1–9. [Google Scholar]
- Khan, M.A.; Qureshi, I.M.; Khanzada, F. A Hybrid Communication Scheme for Efficient and Low-Cost Deployment of Future Flying Ad-Hoc Network (FANET). Drones 2019, 3, 16. [Google Scholar] [CrossRef] [Green Version]
- Al-Emadi, S.; Al-Mohannadi, A. Towards Enhancement of Network Communication Architectures and Routing Protocols for FANETs: A Survey. In Proceedings of the 2020 3rd International Conference on Advanced Communication Technologies and Networking (CommNet), Marrakech, Morocco, 4–6 September 2020; pp. 1–10. [Google Scholar]
- Wu, Q.; Zhang, M.; Dong, C.; Feng, Y.; Yuan, Y.; Feng, S.; Quek, T.Q.S. Routing protocol for heterogeneous FANETs with mobility prediction. ChinaComm 2022, 19, 186–201. [Google Scholar] [CrossRef]
- De Donno, M.; Tange, K.; Dragoni, N. Foundations and Evolution of Modern Computing Paradigms: Cloud, IoT, Edge, and Fog. IEEE Access 2019, 7, 150936–150948. [Google Scholar] [CrossRef]
- Gallego-Madrid, J.; Molina-Zarca, A.; Sanchez-Iborra, R.; Bernal-Bernabe, J.; Santa, J.; Ruiz, P.M.; Skarmeta-Gómez, A.F. Enhancing Extensive and Remote LoRa Deployments through MEC-Powered Drone Gateways. Sensors 2020, 20, 4109. [Google Scholar] [CrossRef] [PubMed]
- Bravo-Arrabal, J.; Toscano-Moreno, M.; Fernandez-Lozano, J.; Mandow, A.; Gomez-Ruiz, J.; García-Cerezo, A. The Internet of Cooperative Agents Architecture (X-IoCA) for Robots, Hybrid Sensor Networks, and MEC Centers in Complex Environments: A Search and Rescue Case Study. Sensors 2021, 21, 7843. [Google Scholar] [CrossRef] [PubMed]
- Lakshmi, P.; Rejith, G.; Toby, T.; Sai Shibu, N.B.; Rao, S.N. A Resilient IoT System Architecture for Disaster Management in Collapsed Buildings. In Proceedings of the 2022 International Conference on Wireless Communications Signal Processing and Networking (WiSPNET), Chennai, India, 24–26 March 2022; pp. 282–287. [Google Scholar]
- Marchese, M.; Moheddine, A.; Patrone, F. UAV and Satellite Employment for the Internet of Things Use Case. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; pp. 1–8. [Google Scholar]
- Sharma, R.; Arya, R. UAV based long range environment monitoring system with Industry 5.0 perspectives for smart city infrastructure. Comput Ind Eng 2022, 168, 108066. [Google Scholar] [CrossRef]
- Mujumdar, O.; Celebi, H.; Guvenc, I.; Sichitiu, M.; Hwang, S.; Kang, K. Use of LoRa for UAV Remote ID with Multi-User Interference and Different Spreading Factors. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Virtual, 25–28 April 2021; pp. 1–7. [Google Scholar]
- Delafontaine, V.; Schiano, F.; Cocco, G.; Rusu, A.; Floreano, D. Drone-aided Localization in LoRa IoT Networks. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 286–292. [Google Scholar]
- Rahman, G.M.E.; Wahid, K.A. LDAP: Lightweight Dynamic Auto-Reconfigurable Protocol in an IoT-Enabled WSN for Wide-Area Remote Monitoring. Remote Sens. 2020, 12, 3131. [Google Scholar] [CrossRef]
- Stellin, M. LoRa Networking in Mobile Scenarios Using UAV Gateways. Master’s Thesis, Instituto Superior Técnico, Lisboa, Portugal, 2018. [Google Scholar]
- Stellin, M.; Sabino, S.; Grilo, A. LoRaWAN Networking in Mobile Scenarios Using a WiFi Mesh of UAV Gateways. Electronics 2020, 9, 630. [Google Scholar] [CrossRef] [Green Version]
- Davoli, L.; Pagliari, E.; Ferrari, G. Hybrid LoRa-IEEE 802.11s Opportunistic Mesh Networking for Flexible UAV Swarming. Drones 2021, 5, 26. [Google Scholar] [CrossRef]
- Pan, M.; Chen, C.; Yin, X.; Huang, Z. UAV-Aided Emergency Environmental Monitoring in Infrastructure-Less Areas: LoRa Mesh Networking Approach. IEEE Internet Things J. 2022, 9, 2918–2932. [Google Scholar] [CrossRef]
- Zirak, Q.; Shashev, D.; Shidlovskiy, S. Swarm of Drones Using LoRa Flying Ad-Hoc Network. In Proceedings of the 2021 International Conference on Information Technology (ICIT), Amman, Jordan, 14–15 July 2021; pp. 400–405. [Google Scholar]
- García Algora, C.M.; Reguera, V.A.; Deligiannis, N.; Steenhaut, K. Review and Classification of Multichannel MAC Protocols for Low-Power and Lossy Networks. Access 2017, 5, 19536–19561. [Google Scholar] [CrossRef]
- Huang, P.; Xiao, L.; Soltani, S.; Mutka, M.W.; Xi, N. The Evolution of MAC Protocols in Wireless Sensor Networks: A Survey. COMST 2013, 15, 101–120. Available online: https://ieeexplore.ieee.org/document/6188353 (accessed on 2 September 2022). [CrossRef]
- Arafat, M.Y.; Poudel, S.; Moh, S. Medium Access Control Protocols for Flying Ad Hoc Networks: A Review. IEEE Sens. J. 2021, 21, 4097–4121. [Google Scholar] [CrossRef]
- Khisa, S.; Moh, S. Medium Access Control Protocols for the Internet of Things Based on Unmanned Aerial Vehicles: A Comparative Survey. Sensors 2020, 20, 5586. [Google Scholar] [CrossRef]
- Amponis, G.; Lagkas, T.; Sarigiannidis, P.; Vitsas, V.; Fouliras, P.; Wan, S. A survey on FANET routing from a cross-layer design perspective. J. Syst. Arch. 2021, 120, 102281. [Google Scholar] [CrossRef]
- Khan, M.F.; Yau, K.A.; Noor, R.M.; Imran, M.A. Routing Schemes in FANETs: A Survey. Sensors 2020, 20, 38. [Google Scholar] [CrossRef] [Green Version]
- Oubbati, O.S.; Lakas, A.; Zhou, F.; Güneş, M.; Yagoubi, M.B. A survey on position-based routing protocols for Flying Ad hoc Networks (FANETs). Veh. Commun. 2017, 10, 29–56. [Google Scholar] [CrossRef]
- Pasandideh, F.; da Costa, J.P.J.; Kunst, R.; Islam, N.; Hardjawana, W.; Pignaton de Freitas, E. A Review of Flying Ad Hoc Networks: Key Characteristics, Applications, and Wireless Technologies. Remote Sens. 2022, 14, 4459. [Google Scholar] [CrossRef]
- Lansky, J.; Ali, S.; Rahmani, A.M.; Yousefpoor, M.S.; Yousefpoor, E.; Khan, F.; Hosseinzadeh, M. Reinforcement Learning-Based Routing Protocols in Flying Ad Hoc Networks (FANET): A Review. Mathematics 2022, 10, 3017. [Google Scholar] [CrossRef]
- Rovira-Sugranes, A.; Razi, A.; Afghah, F.; Chakareski, J. A review of AI-enabled routing protocols for UAV networks: Trends, challenges, and future outlook. Ad Hoc Netw. 2022, 130, 102790. [Google Scholar] [CrossRef]
- Wheeb, A.H.; Nordin, R.; Samah, A.A.; Alsharif, M.H.; Khan, M.A. Topology-Based Routing Protocols and Mobility Models for Flying Ad Hoc Networks: A Contemporary Review and Future Research Directions. Drones 2022, 6, 9. [Google Scholar] [CrossRef]
- Bautista, O.; Akkaya, K.; Uluagac, A.S. Customized novel routing metrics for wireless mesh-based swarm-of-drones applications. Internet Things 2020, 11, 100265. [Google Scholar] [CrossRef]
- Kumari, K.; Sah, B.; Maakar, S. A survey: Different mobility model for FANET. Int. J. Adv. Res. Comput. Sci. Softw. Eng. 2015, 5, 1170–1173. [Google Scholar]
- Esrafilian, O.; Gangula, R.; Gesbert, D. Autonomous UAV-aided Mesh Wireless Networks. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Toronto, ON, Canada, 6–9 July 2020; pp. 634–640. [Google Scholar]
- Jacewicz, M.; Żugaj, M.; Głębocki, R.; Bibik, P. Quadrotor Model for Energy Consumption Analysis. Energies 2022, 15, 7136. [Google Scholar] [CrossRef]
- Chowdhuri, S.; Banerjee, S.; Chaudhuri, S.S. Implementation of a novel Minimum Energy Consume Secure Routing Protocol for reliable and energy efficient rescue operation of FANET. In Proceedings of the 2018 IEEE Applied Signal Processing Conference (ASPCON), Kolkata, India, 7–9 December 2018; pp. 129–133. [Google Scholar]
- Ayub, M.S.; Adasme, P.; Carrillo Melgarejo, D.; Lopes Rosa, R.; Zegarra Rodríguez, D. Intelligent Hello Dissemination Model for FANET Routing Protocols. IEEE Access 2022, 10, 46513–46525. [Google Scholar] [CrossRef]
- Khan, I.U.; Qureshi, I.M.; Aziz, M.A.; Cheema, T.A.; Shah, S.B.H. Smart IoT Control-Based Nature Inspired Energy Efficient Routing Protocol for Flying Ad Hoc Network (FANET). IEEE Access 2020, 8, 56371–56378. [Google Scholar] [CrossRef]
- Mansour, H.S.; Mutar, M.H.; Aziz, I.A.; Mostafa, S.A.; Mahdin, H.; Abbas, A.H.; Hassan, M.H.; Abdulsattar, N.F.; Jubair, M.A. Cross-Layer and Energy-Aware AODV Routing Protocol for Flying Ad-Hoc Networks. Sustainability 2022, 14, 8980. [Google Scholar] [CrossRef]
- Cheriguene, Y.; Djellikh, S.; Bousbaa, F.Z.; Lagraa, N.; Lakas, A.; Kerrache, C.A.; Karim Tahari, A.E. SEMRP: An Energy-Efficient Multicast Routing Protocol for UAV Swarms. In Proceedings of the IEEE/ACM 24th International Symposium on Distributed Simulation and Real Time Applications, Prague, Czech Republic, 14–16 September 2020; pp. 182–189. [Google Scholar]
- Mahmud, I.; Cho, Y.-Z. Adaptive Hello Interval in FANET Routing Protocols for Green UAVs. IEEE Access 2019, 7, 63004–63015. [Google Scholar] [CrossRef]
- Namdev, M.; Goyal, S.; Agarwal, R. An Optimized Communication Scheme for Energy Efficient and Secure Flying Ad-hoc Network (FANET). Wirel. Pers. Commun. 2021, 120, 1291–1312. [Google Scholar] [CrossRef]
- Tiurlikova, A.; Stepanov, N.; Mikhaylov, K. Improving the Energy Efficiency of a LoRaWAN by a UAV-based Gateway. In Proceedings of the 2019 11th International Congress on Ultra Modern Telecommunications and Control Systems and Workshops (ICUMT), Dublin, Ireland, 28–30 October 2019; pp. 1–6. [Google Scholar]
- Moysiadis, V.; Lagkas, T.; Argyriou, V.; Sarigiannidis, A.; Moscholios, I.D.; Sarigiannidis, P. Extending ADR mechanism for LoRa enabled mobile end-devices. Simul. Model. Pract. Theory 2021, 113, 102388. [Google Scholar] [CrossRef]
- Choi, D.H.; Kim, S.H.; Sung, D.K. Energy-efficient maneuvering and communication of a single UAV-based relay. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2320–2327. [Google Scholar] [CrossRef]
- TP-LINK AC750 Wi-Fi Travel Router Model TL-WR902AC Datasheet. Available online: https://static.tp-link.com/2020/202010/20201019/TL-WR902AC(EU&US)3.0_Datasheet.pdf (accessed on 5 December 2022).
- HOPERF RFM95W/96W/98W Datasheet V2.0. Available online: https://www.hoperf.com/modules/lora/RFM95.html (accessed on 5 December 2022).
- Raspberry Pi 4 Computer Model B Product Brief. Available online: https://datasheets.raspberrypi.com/rpi4/raspberry-pi-4-product-brief.pdf (accessed on 5 December 2022).
- PARROT ANAFI USA Technical Specifications V1.5.3. Available online: https://www.parrot.com/assets/s3fs-public/2022-01/white-paper-anafi-usa-v1.5.3_en.pdf (accessed on 5 December 2022).
- Ji, B.; Li, Y.; Zhou, B.; Li, C.; Song, K.; Wen, H. Performance Analysis of UAV Relay Assisted IoT Communication Network Enhanced With Energy Harvesting. IEEE Access 2019, 7, 38738–38747. [Google Scholar] [CrossRef]
- Yang, Z.; Xu, W.; Shikh-Bahaei, M. Energy Efficient UAV Communication with Energy Harvesting. IEEE Trans. Veh. Technol. 2020, 69, 1913–1927. [Google Scholar] [CrossRef] [Green Version]
- Citroni, R.; Di Paolo, F.; Livreri, P. A Novel Energy Harvester for Powering Small UAVs: Performance Analysis, Model Validation and Flight Results. Sensors 2019, 19, 1771. [Google Scholar] [CrossRef] [Green Version]
- Ayoub, W.; Samhat, A.E.; Nouvel, F.; Mroue, M.; Prevotet, J. Internet of Mobile Things: Overview of LoRaWAN, DASH7, and NB-IoT in LPWANs Standards and Supported Mobility. IEEE Commun. Surv. Tutor. 2019, 21, 1561–1581. [Google Scholar] [CrossRef] [Green Version]
- SARA-N2 Series Datasheet. Available online: https://content.u-blox.com/sites/default/files/SARA-N2_ProductSummary_(UBX-16014015).pdf (accessed on 5 December 2022).
- Ameloot, T.; Moeneclaey, M.; Van Torre, P.; Rogier, H. Characterizing the Impact of Doppler Effects on Body-Centric LoRa Links with SDR. Sensors 2021, 21, 4049. [Google Scholar] [CrossRef]
Figure 1.
LoRaWAN architecture.

Figure 2.
LoRaWAN frame.

Figure 3.
Relationship between MANET, VANET and FANET.

Figure 4.
FANET types of links.

Figure 5.
FANET topologies.

Figure 6.
Superposition of IoT and cloud architectures.

Figure 7.
Taxonomy of MAC protocols for FANETs.

Table 1.
Keywords and search expressions.
| No. | Keywords |
|---|---|
| 1. | “LoRa” AND “FANET” |
| 2. | “FANET” AND “Communications” |
| 3. | “FANET” AND “Mobility” |
| 4. | “FANET” AND “Energy” |
| 5. | “LoRa” AND “UAV” AND “Communications” |
| 6. | “LoRa” AND “UAV” AND “Architecture” |
| 7. | “LoRa” AND “UAV” AND (“Medium Access Control” OR “MAC” OR “Mesh”) |
| 8. | “LoRa” AND “UAV” AND “Routing” |
| 9. | “LoRa” AND “UAV” AND “Mobility” |
| 10. | “LoRa” AND “UAV” AND “Energy” |
Table 2.
Challenges involved in a FANET implementation.
| Challenge | Topic |
|---|---|
| Communications |
|
| Mobility |
|
| Energy |
|
Table 4.
UAV taxonomy.
| By Wing Type | By Size | By Type of Flight | By Flight Range | By Energy Autonomy | By Altitude | By Purpose | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Fixed wing [41,42,43] | Rotary wing [41,42,43] | Hybrid [41] | Large [42,43] | Small [42,43] | Autonomous [42] | Remotely controlled [42] | Close-range [43] | Short-range [43] | Mid-range [43] | Long-range | High [42] | Medium [42] | Low [42] | High [42] | Medium [42] | Low [42] | Military [41] | Communications [41,42] | Surveillance [41] | Photography/Mapping [41,43] | Exploration/Surveying [41] | Remote sensing [41] | Delivery [43] | First-Person View (FPV)/Entertainment |
Table 6.
Single UAV and FANET architectures involving LoRa or LoRaWAN.
| Reference | Topology | Communication Technology | IoT Architecture | UAV Type | Application | Test | ||
|---|---|---|---|---|---|---|---|---|
| Air-to-Ground | Air-to-Air | Air-to-Satellite | ||||||
| [51] | Single UAV | LoRaWAN (access) 4G/Wi-Fi (backbone) | --- | --- | Edge | Rotary wing | Agricultural monitoring | Single UAV-to-Ground proof of concept |
| [52] | Single UAV | LoRaWAN/Bluetooth (both as access) Wi-Fi (backbone) | --- | --- | Edge | Rotary wing | Search and rescue | Single UAV-to-Ground proof of concept |
| [53] | Single UAV | LoRaWAN (access/backbone) | --- | --- | Fog | Rotary wing | Disaster monitoring | Single UAV-to-Ground proof of concept |
| [54] | Single UAV | LoRaWAN (access) | --- | Simulation through delay (backbone) | Cloud | Rotary wing | Sensor monitoring | Single UAV-to-Ground proof of concept |
| [55] | Single UAV | LoRaWAN (access) Wi-Fi (backbone) | --- | --- | Cloud | Rotary wing | Environmental monitoring | Single UAV-to-Ground proof of concept |
| [56] | Single UAV | LoRa (access) | --- | --- | Cloud | --- | UAV remote identification | Single UAV-to-Ground simulation |
| [57] | Multiple independent UAVs | LoRaWAN (access) | --- | --- | Cloud | Rotary wing | Search and rescue, asset localization | Single UAV-to-Ground experiments |
| [58] | Single UAV | LoRa (access) | --- | --- | Cloud | Rotary wing | Sensor monitoring | Single UAV-to-Ground experiments |
| [59,60] | Single cluster | LoRaWAN (access) 802.11 g (backbone) | 802.11 g (backhaul) | --- | Cloud | Rotary wing | Emergency response | Simulation |
| [61] | 3D multi-layer | 802.11 s/LoRaWAN (both as access/backbone) | 802.11 s/LoRa (backhaul) | --- | Edge, fog, cloud | Rotary wing | Surveillance, agriculture, flight telemetry | Single UAV-to-Ground proof of concept |
| [62] | Single cluster | LoRa (access/backbone) | LoRa (backhaul) | --- | Cloud | Rotary wing | Environmental emergencies | Single UAV two-hop proof of concept |
| [63] | Single cluster | LoRa (access/backbone) | LoRa (backhaul) | --- | Cloud | Rotary wing | Open | Three UAVs two-hop proof of concept |
Table 7.
Proposed MAC protocols in FANETs involving LoRa or LoRaWAN.
| Reference | Topology | Link Type | Communication Technology | Proposed MAC Protocol |
|---|---|---|---|---|
| [59,60] | Single cluster | Air-to-air | 802.11 g (backhaul) | CSMA/CA |
| Air-to-ground | LoRaWAN (access) | ALOHA | ||
| 802.11 g (backbone) | CSMA/CA | |||
| [61] | 3D multi-layer | Air-to-air | 802.11 s (backhaul) | CSMA/CA |
| LoRa (backhaul) | TDMA | |||
| Air-to-ground | 802.11 s (as access/backbone) | CSMA/CA | ||
| LoRaWAN (as access/backbone) | ALOHA | |||
| [62] | Single cluster | Air-to-air | LoRa (backhaul) | Custom slotted ALOHA |
| Air-to-ground | LoRa (access/backbone) | Custom slotted ALOHA | ||
| [63] | Single cluster | Air-to-air | LoRa (backhaul) | CSMA/CA |
| Air-to-ground | LoRa (access/backbone) | CSMA/CA |
Table 8.
Proposed routing protocols in FANETs involving LoRa or LoRaWAN.
| Reference | Topology | Link Type | Communication Technology | Proposed Routing Protocol |
|---|---|---|---|---|
| [59,60] | Single cluster | Air-to-Air | 802.11 g (backhaul) | OLSR |
| Air-to-Ground | LoRaWAN (access) | --- | ||
| 802.11 g (backbone) | OLSR | |||
| [61] | 3D multi-layer | Air-to-Air | 802.11 s (backhaul) | HWMP |
| LoRa (backhaul) | Not defined | |||
| Air-to-Ground | 802.11 s (as access/backbone) | HWMP | ||
| LoRaWAN (as access/backbone) | --- | |||
| [62] | Single cluster | Air-to-Air | LoRa (backhaul) | GPS-based directed flooding |
| Air-to-Ground | LoRa (access/backbone) | Not required | ||
| [63] | Single cluster | Air-to-Air | LoRa (backhaul) | Custom DSDV |
| Air-to-Ground | LoRa (access/backbone) | Custom DSDV |
Table 9.
Energy consumption at different components of a FANET node during a 30-min flight.
| Component | Current [mA] | Voltage [V] | Power [W] | Energy for a 30-min Flight [J] | % of Energy Consumption |
|---|---|---|---|---|---|
| Wi-Fi transmitter (802.11 n at 20 dBm, 2.4 GHz [89]) | 2000 | 5 | 10 | 18,000 | 4.83% |
| LoRa transmitter (RFM95 W at 20 dBm, 915 MHz [90]) | 120 | 3.7 | 0.32 | 799 | 0.21% |
| Communications controller (Raspberry Pi 4 B [91]) | 2500 | 5 | 12.5 | 22,500 | 6.04% |
| UAV (Parrot Anafi USA [92]) | --- | --- | 4 × 46 | 331,200 | 88.91% |
| TOTAL | --- | --- | 125.1 | 372,499 | 100.00% |
Table 10.
Comparison between LoRa/LoRaWAN, Wi-Fi, and cellular LPWANs for their use in FANETs.
| Aspect | LoRa/LoRaWAN | Wi-Fi | Cellular-Based LPWAN (NB-IoT) |
|---|---|---|---|
| Range [10,96] | 2–5 km in urban areas and 15 km in suburban areas | Up to 100 m | 0–1 km in urban areas and up to 15 km in suburban areas |
| Throughput [25,31,96] | Less than 200 kbps | Up to hundreds of Mbps | Up to 1 Mbps |
| Frequency bands | ISM (unlicensed) | ISM (unlicensed) | International Mobile Telecommunications (IMT) (licensed) |
| Energy consumption [J] * | ~800 | ~18,000 | ~1500 [97] |
| Requires service provider infrastructure | No | No | Yes |
| Includes protocols for mesh networking | No | Yes | It does not require them as it relies on infrastructure |
* Assuming parameters for maximum consumption during a 30-min period.
Table 11.
Advantages and disadvantages of using LoRa in FANETs by aspect.
| Aspect | Advantages | Disadvantages |
|---|---|---|
| Communications |
|
|
| Mobility [98] |
|
|
| Energy |
|
|
Table 12.
Advantages and disadvantages of using LoRa in FANETs by type of link.
| Link | Advantages | Disadvantages |
|---|---|---|
| Air-to-air |
|
|
| Air-to-ground |
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Paredes, W.D.; Kaushal, H.; Vakilinia, I.; Prodanoff, Z. LoRa Technology in Flying Ad Hoc Networks: A Survey of Challenges and Open Issues. Sensors 2023, 23, 2403. https://doi.org/10.3390/s23052403
AMA Style
Paredes WD, Kaushal H, Vakilinia I, Prodanoff Z. LoRa Technology in Flying Ad Hoc Networks: A Survey of Challenges and Open Issues. Sensors. 2023; 23(5):2403. https://doi.org/10.3390/s23052403
Chicago/Turabian StyleParedes, William David, Hemani Kaushal, Iman Vakilinia, and Zornitza Prodanoff. 2023. "LoRa Technology in Flying Ad Hoc Networks: A Survey of Challenges and Open Issues" Sensors 23, no. 5: 2403. https://doi.org/10.3390/s23052403
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.