
Analysis and Correction of Measurement Error of Spherical Capacitive Sensor Caused by Assembly Error of the Inner Frame in the Aeronautical Optoelectronic Pod


Abstract
:1. Introduction
2. Measurement Principle
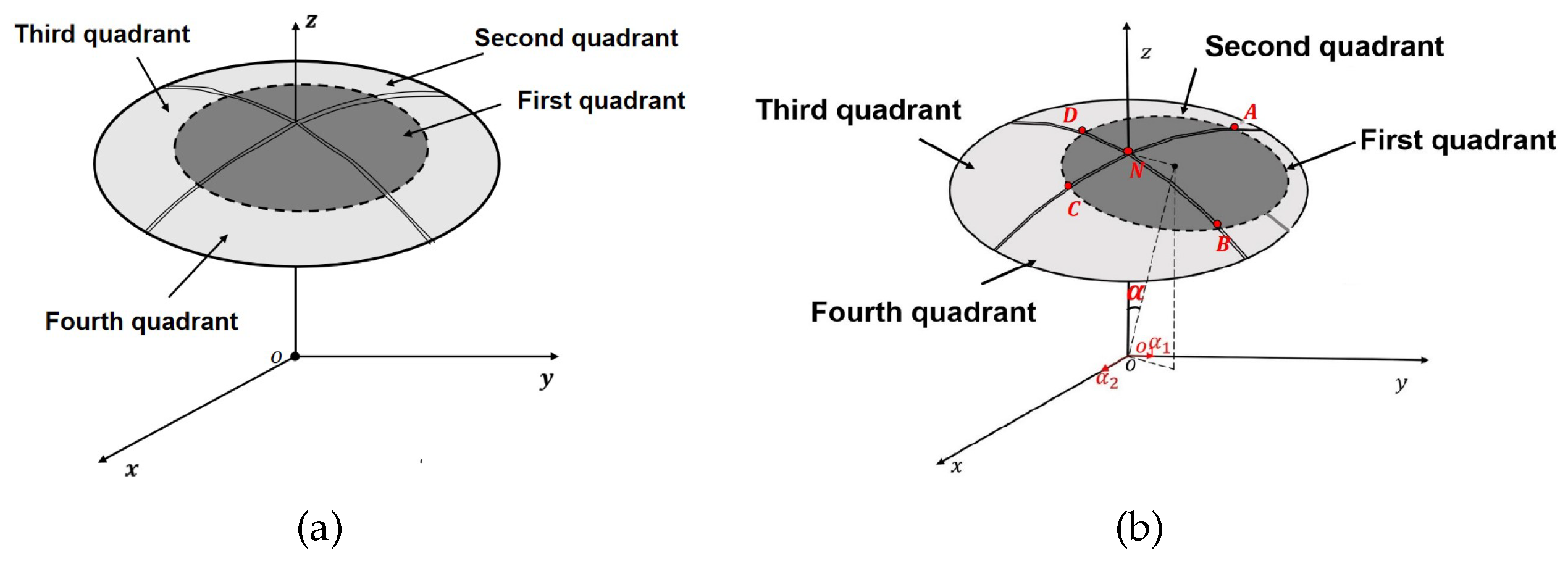
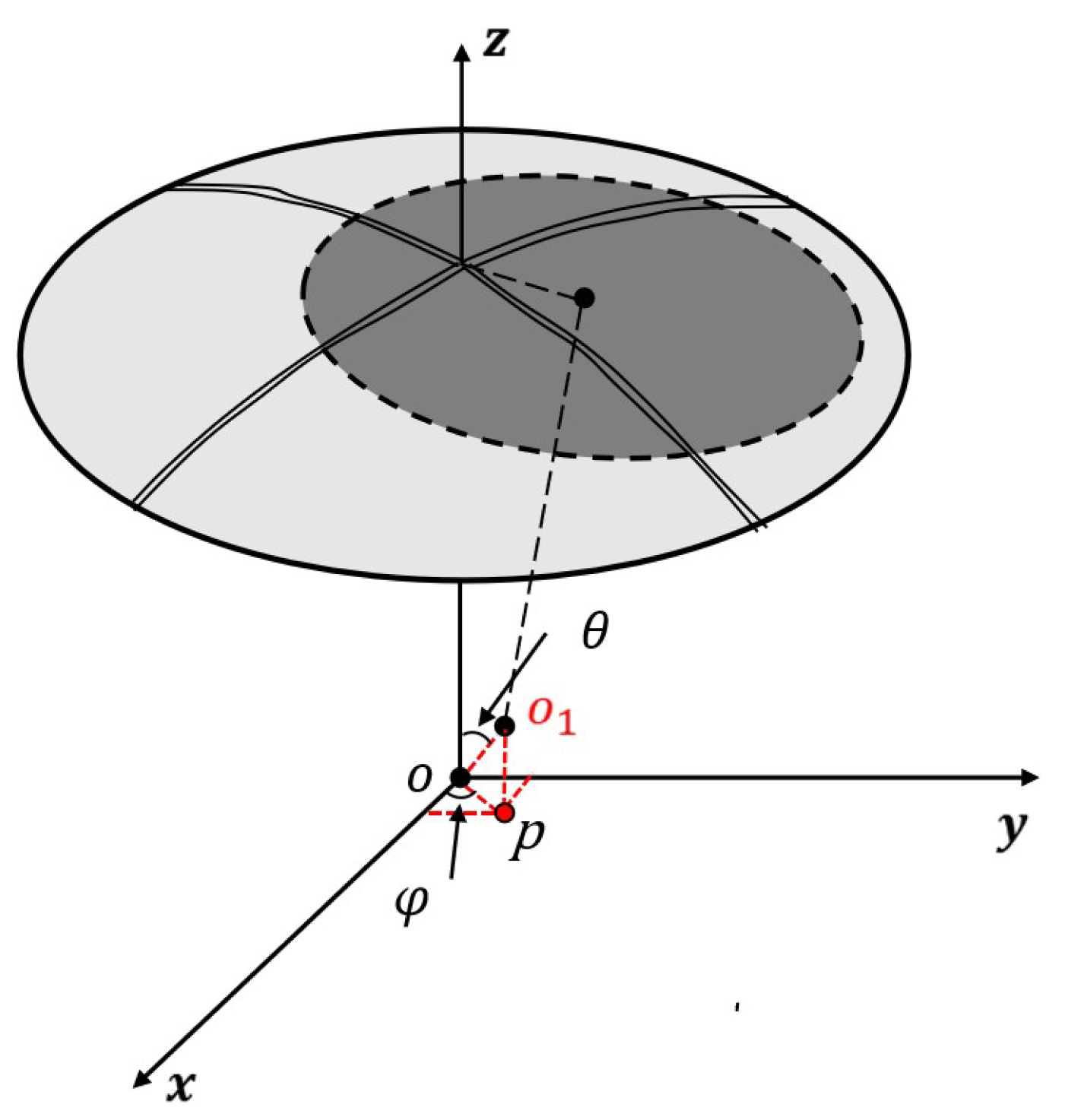
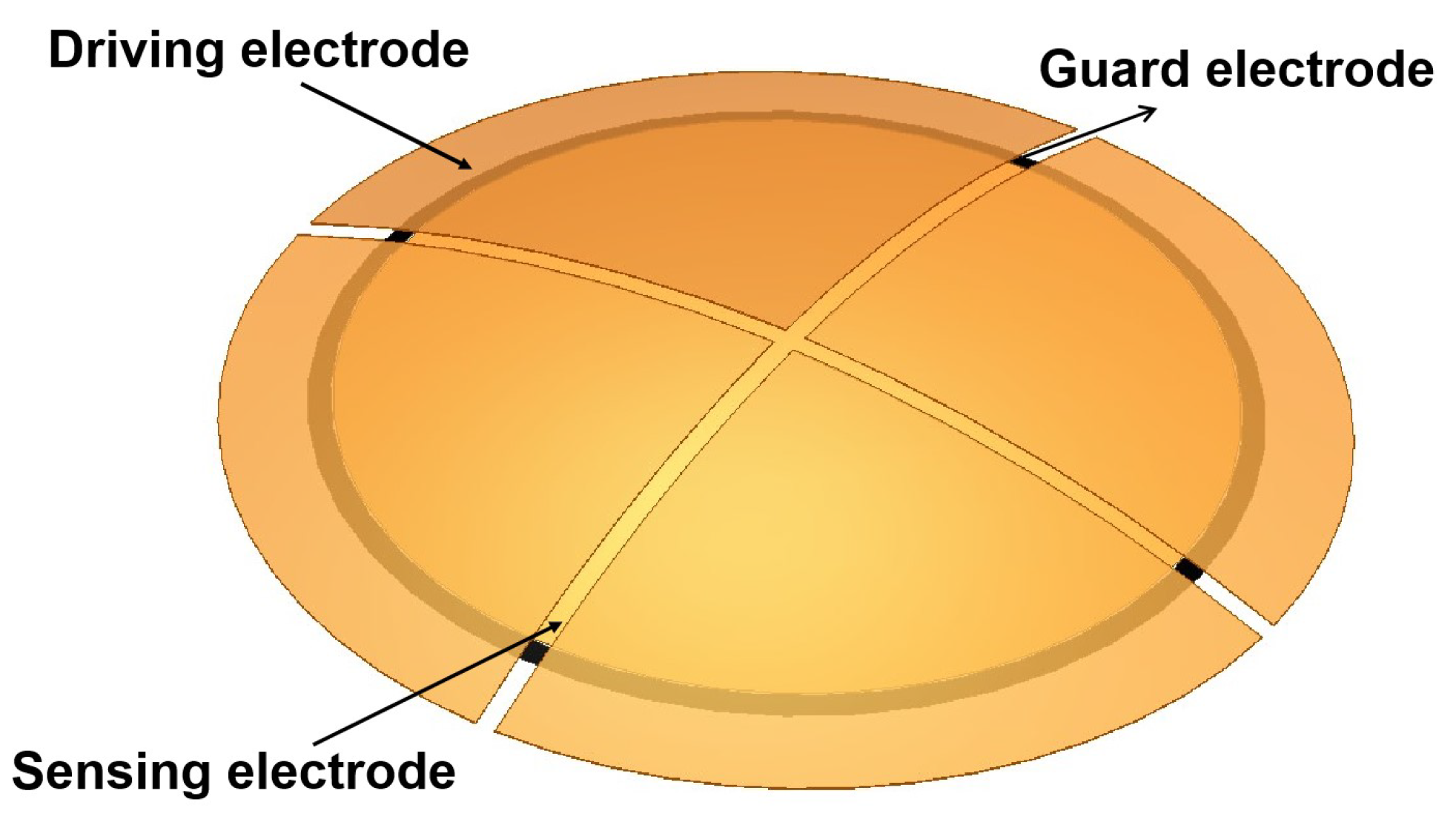
2.1. Structural Model of the Spherical Capacitive Sensor
2.2. 2-DOF Angular Displacement Signal Measurement
2.3. Calculation of Electrode Installation Error
3. Finite Element Model Setup
3.1. Model Parameters for the Capacitive Sensor
- (1)
- (2)
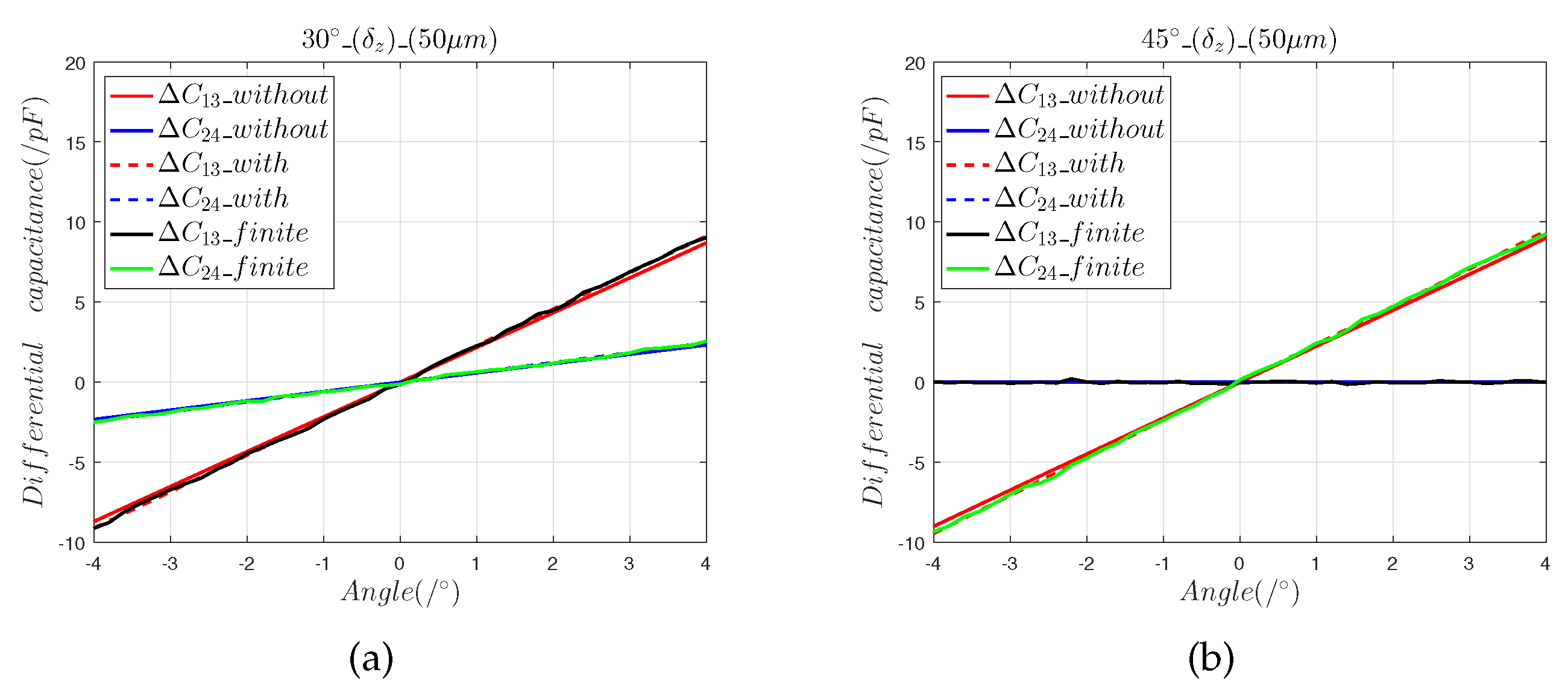
- The 5 m axial installation error introduced a zero offset error of 0.012° and the 50 m axial installation error introduced a zero offset error of 0.11°.
- (3)
- When the sensing electrode moves along the space angles and , the 5 m axial installation errors and the 50 m axial installation errors introduce equal zero offset errors, which indicates that the axial installation error can be reduced by calibration.
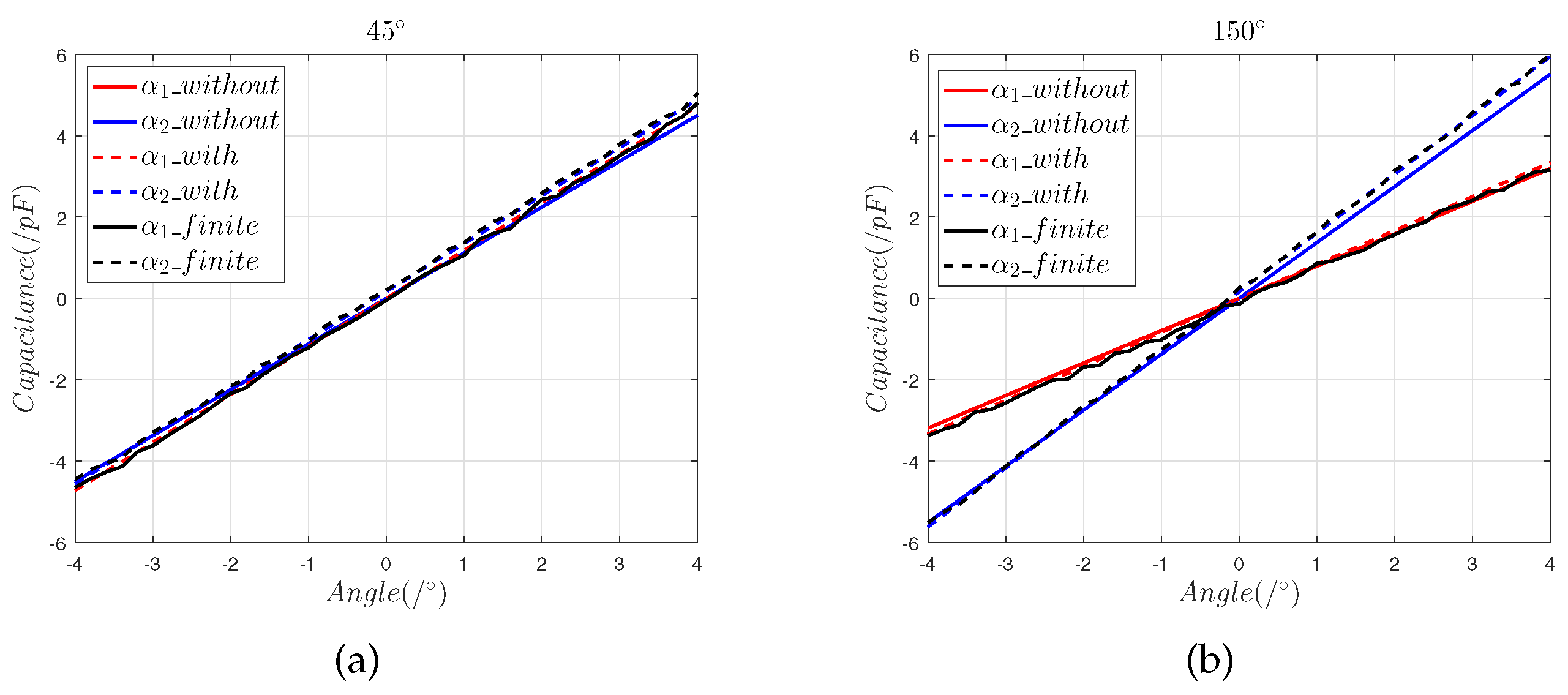
- (1)
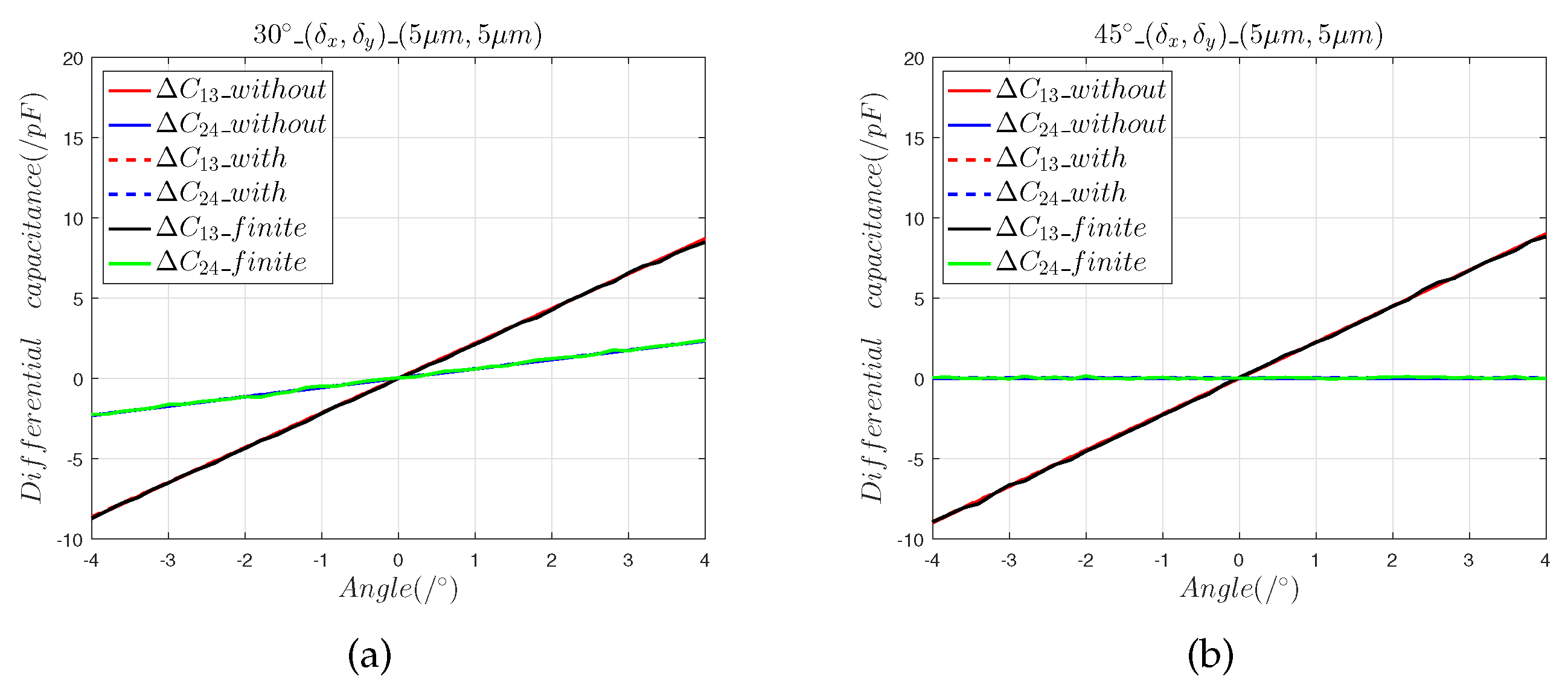
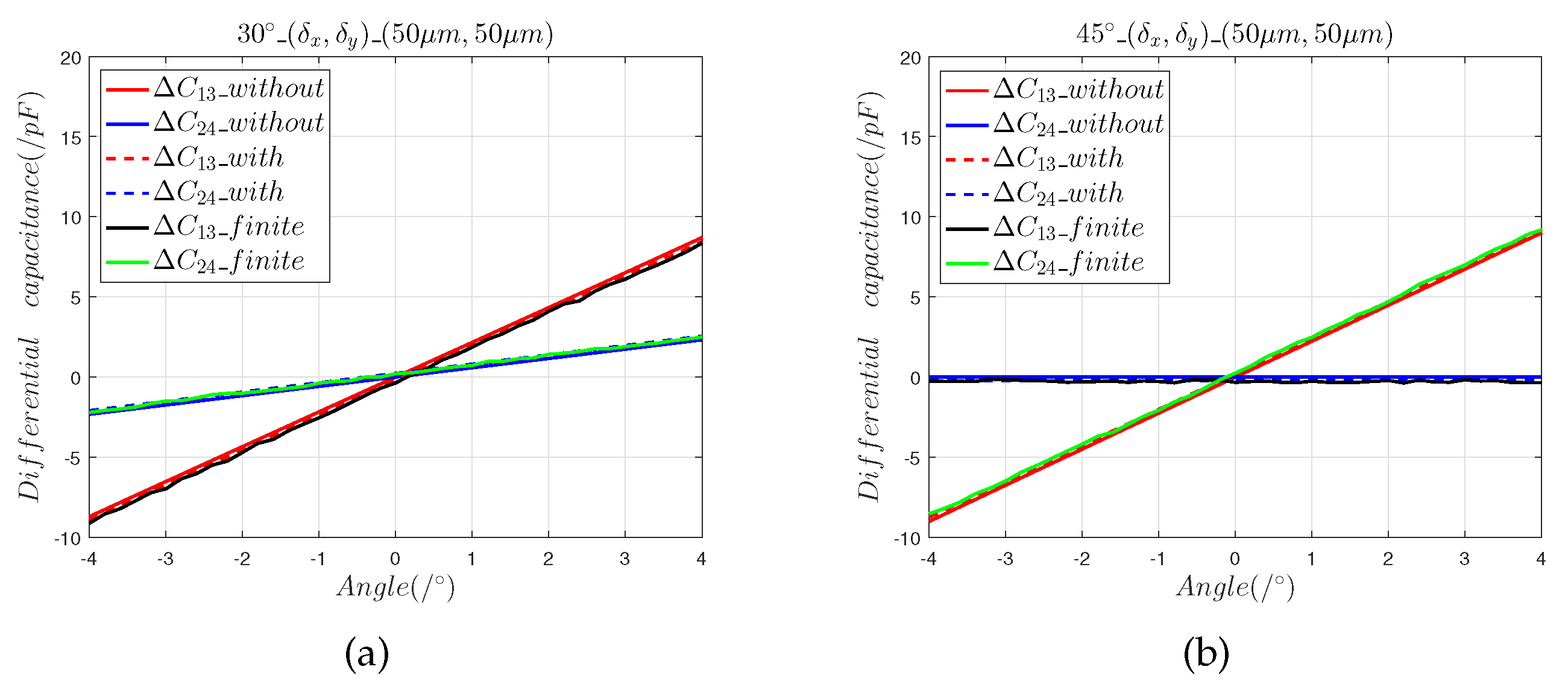
- The results of the finite element model that contained the radial installation error are consistent with the predictions of the mathematical model. The radial installation error will cause the measurement results of the sensor to have a slope offset, which is defined as:
- (2)
- Radial installation errors differ from axial installation errors in that they cause the output curve of the sensor to produce a slope offset error. It can be seen that in the 30° direction, the 5 m radial installation error introduced a slope offset error, and the 50 m radial installation error introduced a slope offset error. In the 45° direction, the 5 m radial installation error introduced a slope offset error of , and the 50 m radial installation error introduced a slope offset error.
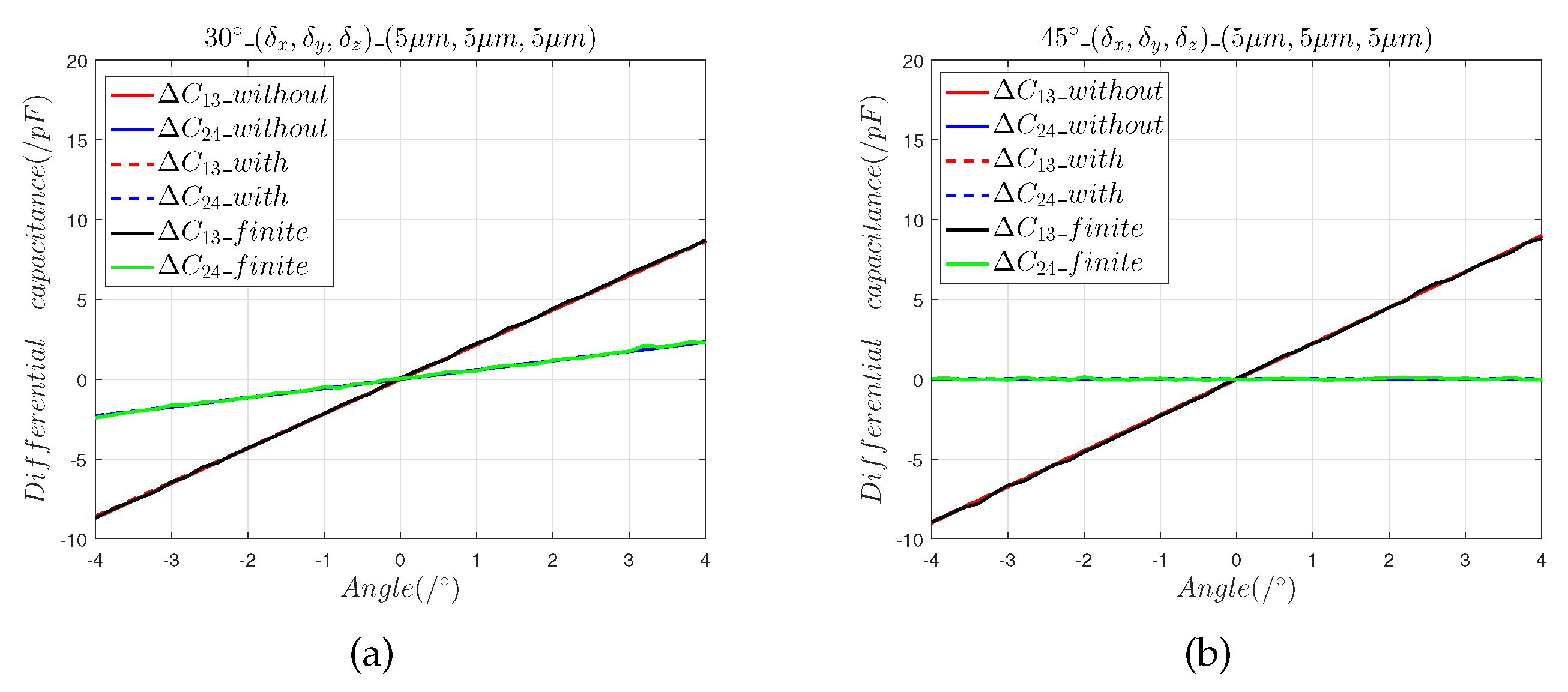
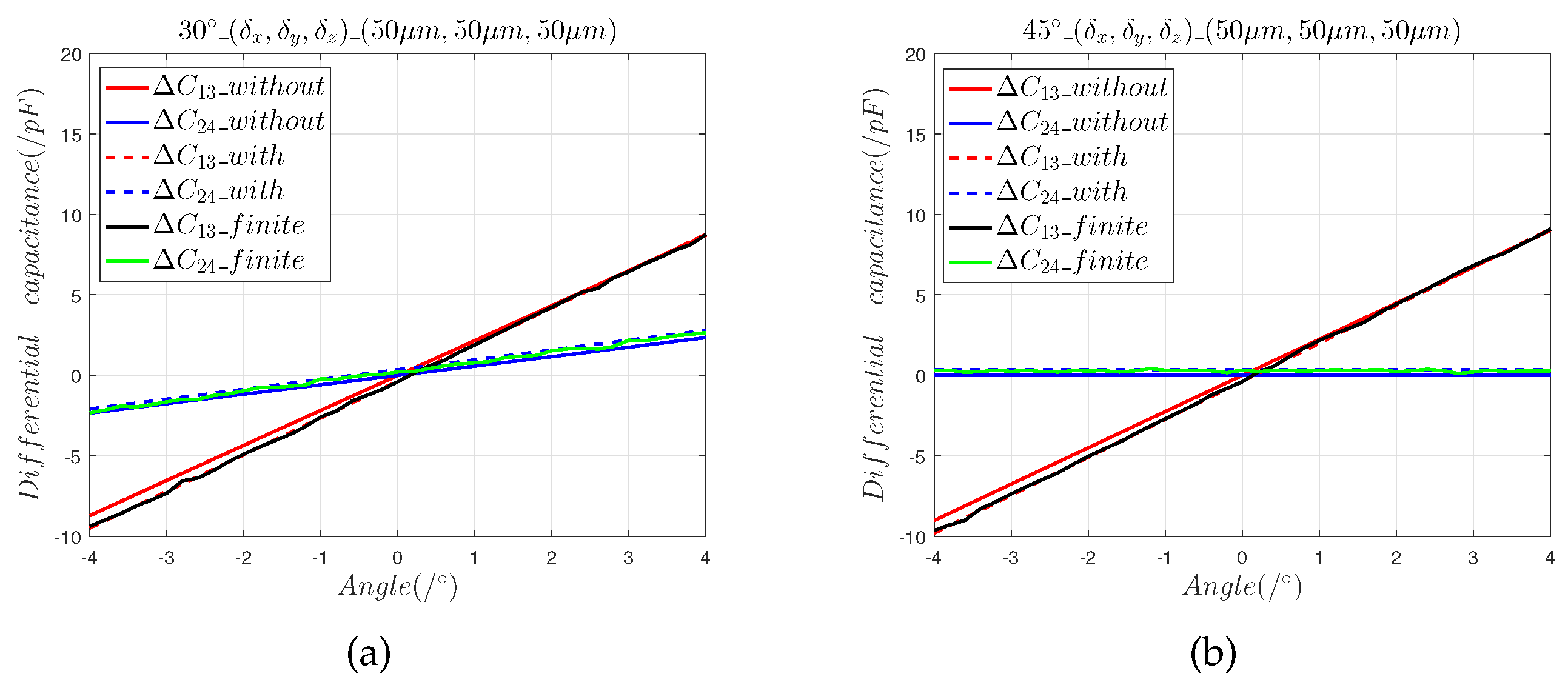
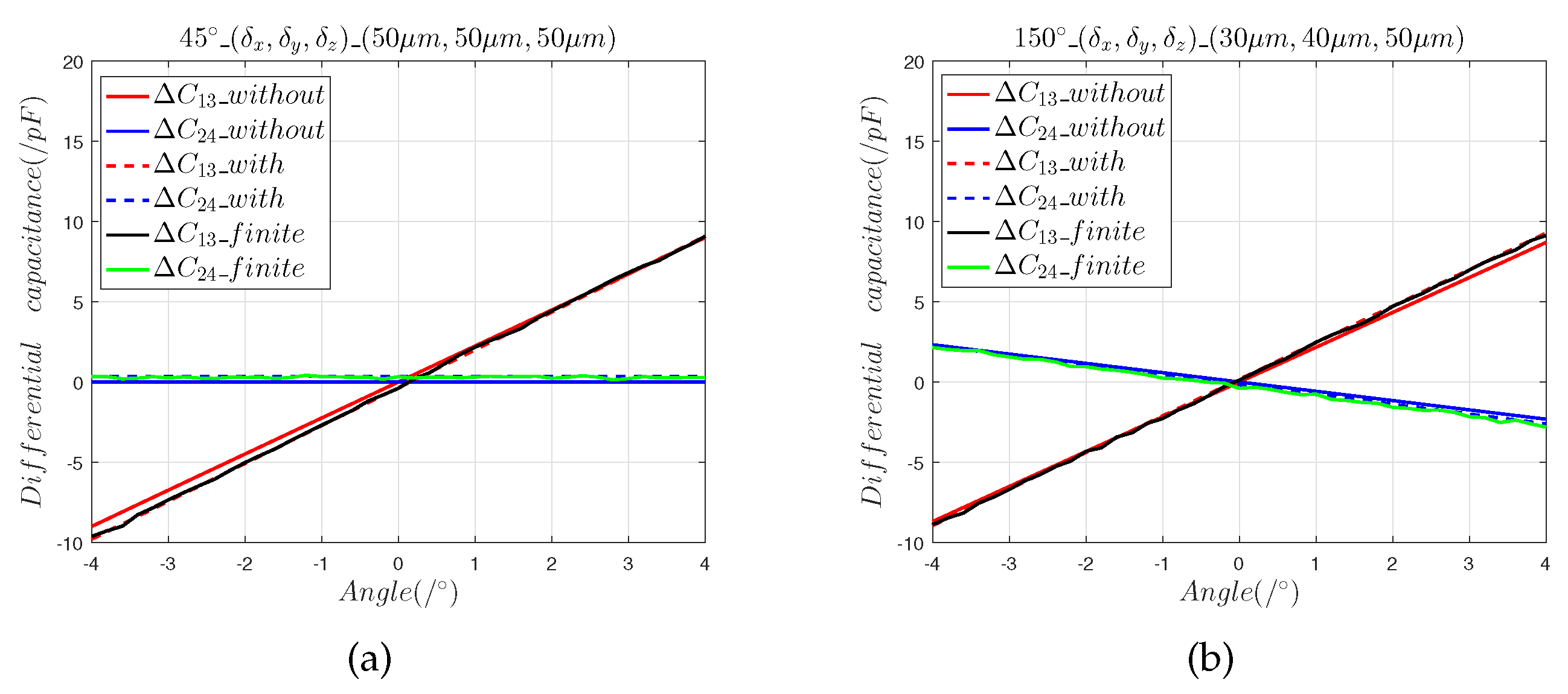
- (1)
- The results calculated by the finite element model are consistent with the predictions of the mathematical model, which shows that the mathematical model accurately calculated the value of the installation error.
- (2)
- Composite mounting errors cause nonlinear offsets. In the 30° direction, the maximum angle measurement error introduced by the composite installation errors of 5 m and 50 m were, respectively, 0.018° and 0.357°; the corresponding values for the 45° direction were 0.0156° and 0.354°
3.2. Modelling and Analysis of Installation Error Correction Methods
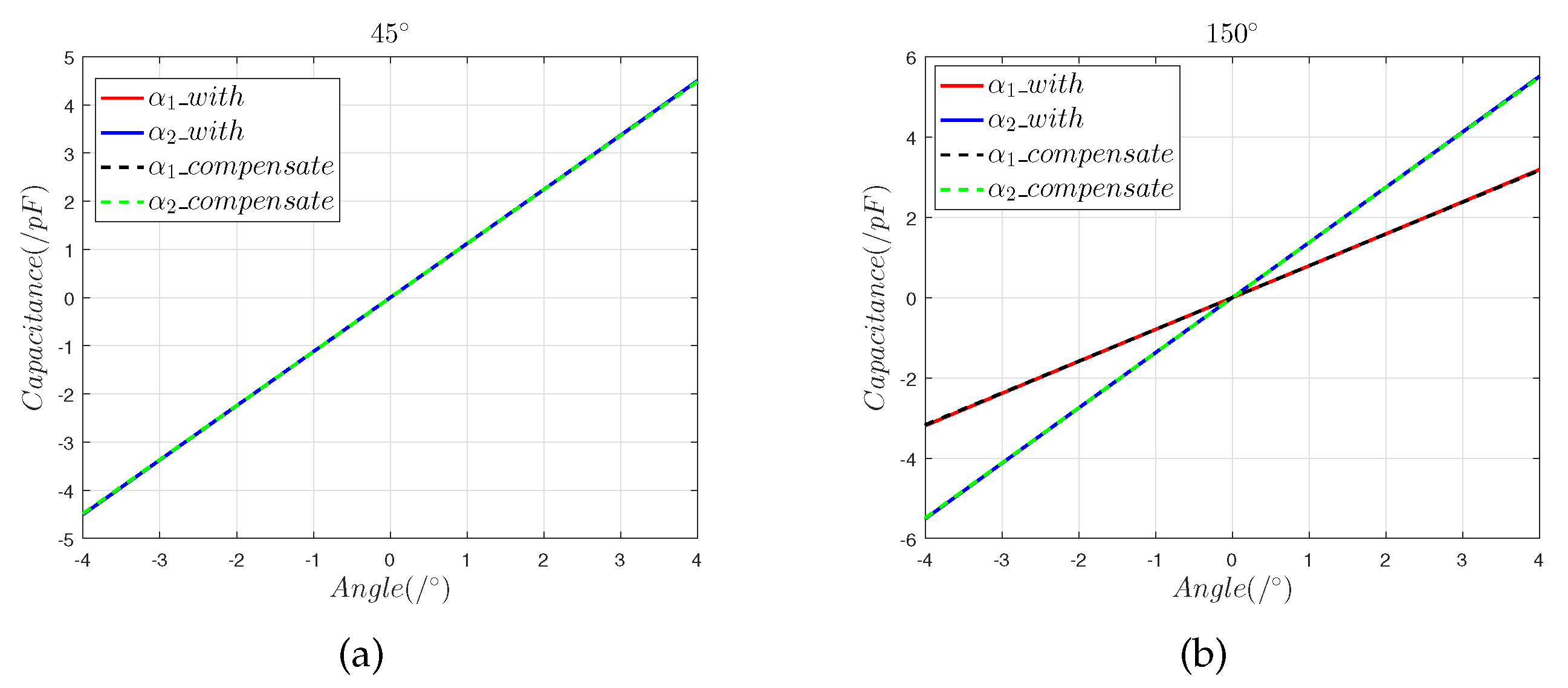
- (1)
- The curve only has a slope offset, which is consistent with Equation (12). According to the slope of the fitting curve and the slope of the theoretical curve, the offset can be obtained.
- (2)
- Since the effects of the slope offset error introduced by the offset differ for different trajectories, this part of the error cannot be eliminated by calibration, so can be compensated for by multiplying by .
- (3)
- The zero offset error introduced by the offsets and is a fixed value on different trajectories. We solve the expression to obtain the zero offset error introduced by + and subtract the solution value from the error value to correct for +.
- (4)
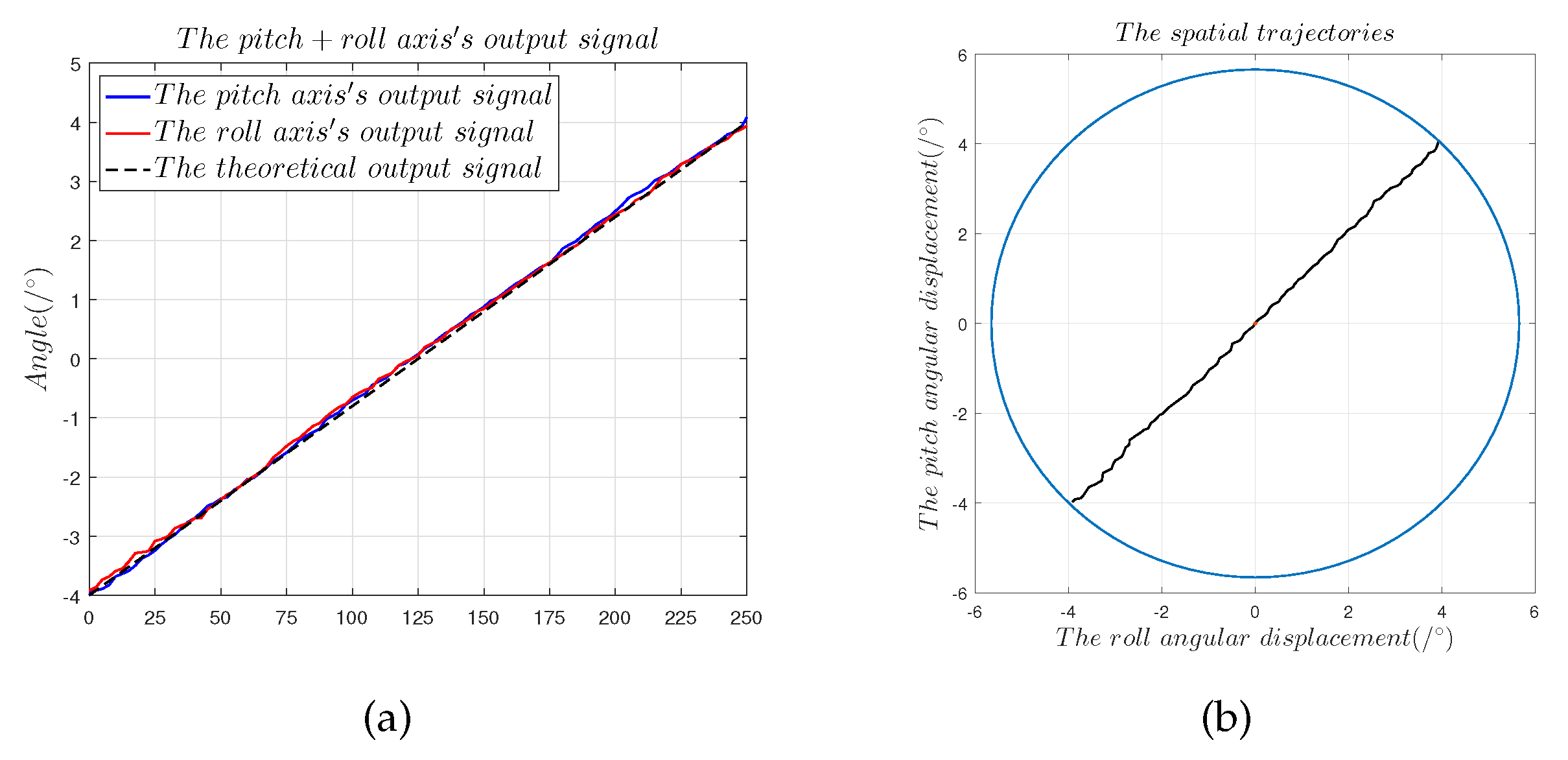
- The decoupled output values for installation errors (30 m, 40 m, and 50 m) after correction are shown in Figure 12
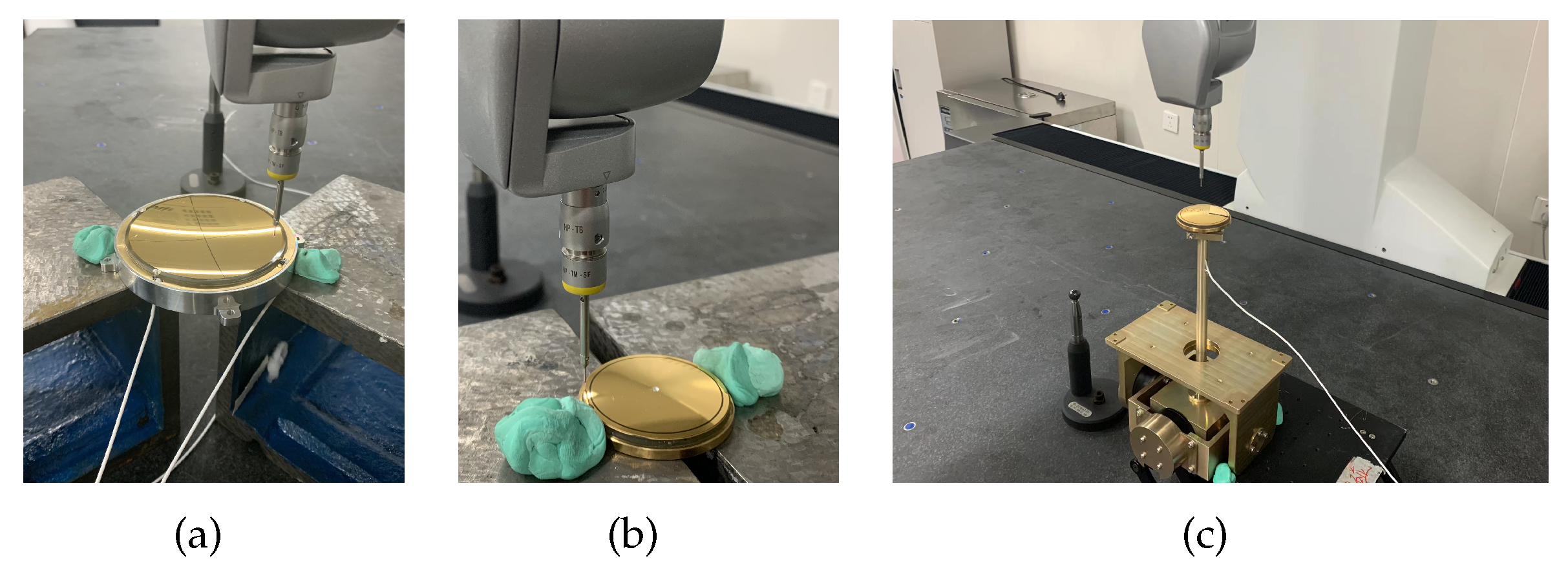
4. Experimental Setup
- (1)
- Selecting a material with strong corrosion resistance and low temperature coefficient as the substrate for spherical electrodes; in this study, we select devitrified glass as the substrate material.
- (2)
- The devitrified glass is processed by machining to construct the spherical electrode substrate, and the surface of the processed spherical substrate is precision-ground to make its surface roughness reach the nanometer standard.
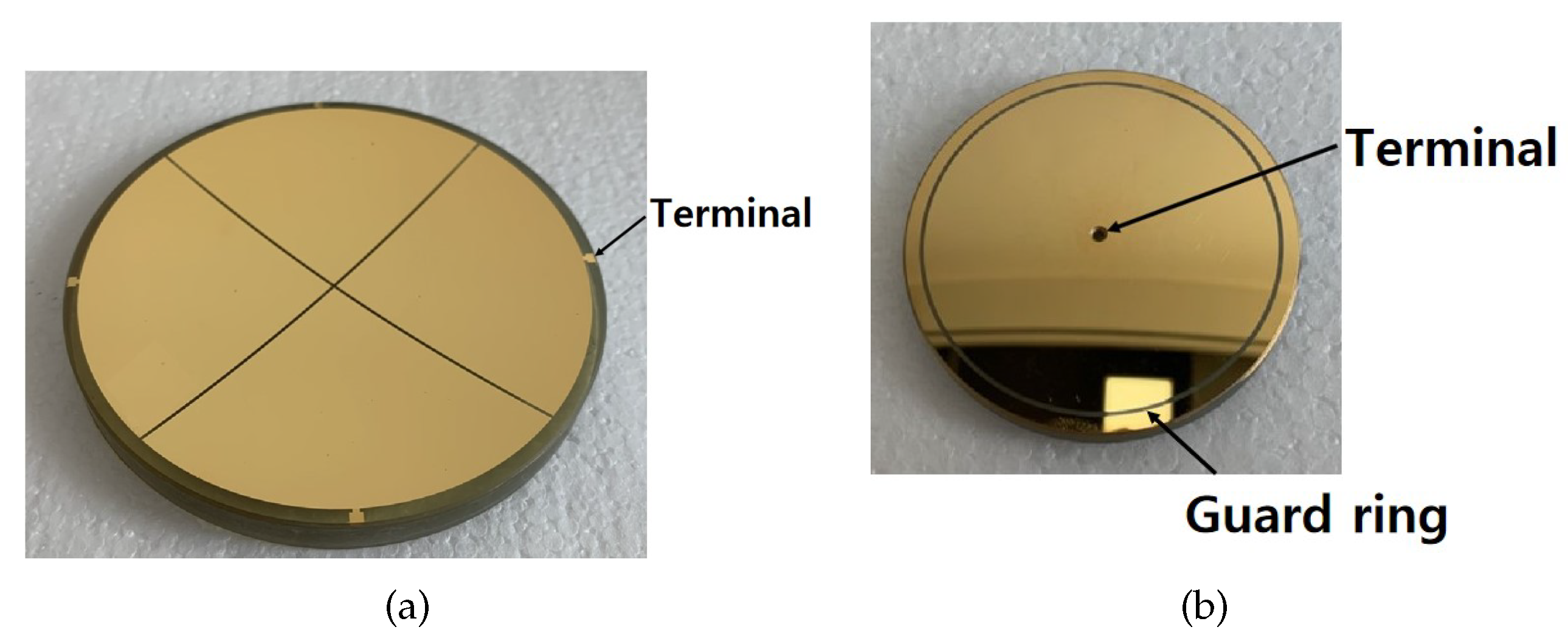
- (3)
- The surface of the substrate is coated with gold film, and the details of the electrode, such as terminals and guard ring, can be processed by photolithography.
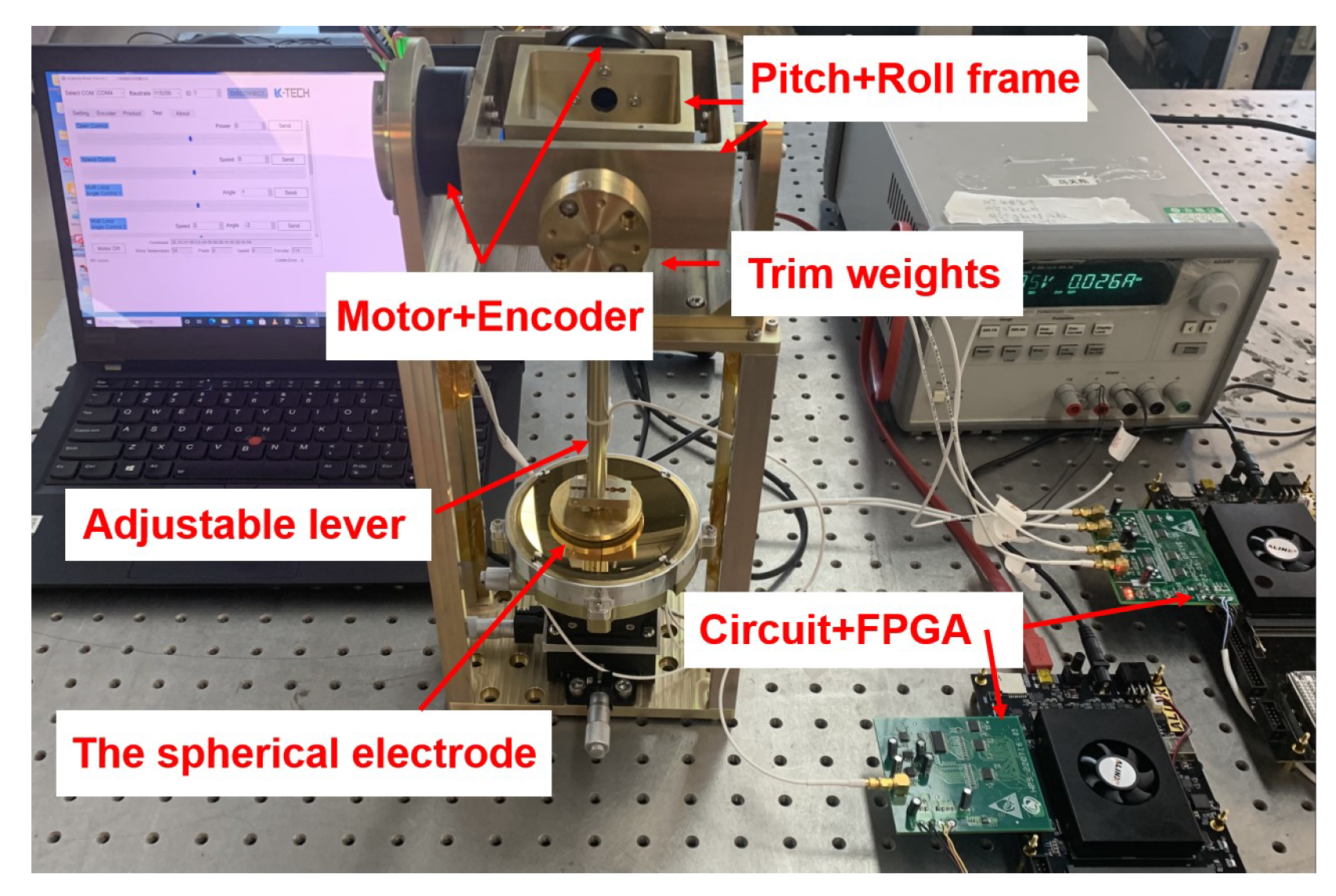
4.1. Experimental Setup and Assembly
- (1)
- The driver electrode was installed, and the sensing electrode was fastened to the brass base. The sensor core wire was attached to the base to prevent it from disengaging from the electrode under external force.
- (2)
- Referring to Figure 14, the height of the driving electrode above the brass base, the height of the induction electrode above the brass base, and the height of the brass base above the bottom surface of the frame were measured by a Croma precision micrometer. The support rod was adjusted according to the measured values of , , and to reduce radial installation error between the actual position of the induction electrode and the theoretical installation position.
- (3)
- The counterweight flange was adjusted to ensure that the sensing electrode would remain stable at any point in space absent external forces. An image of the physical two-axis experimental frame system is shown in Figure 15.
- (4)
- The capacitances of , , , and in the four quadrants were measured with a high-precision LCR meter. According to the measured capacitance values, the x-axis and y-axis of the 3-DOF linear displacement platform were adjusted to preliminarily align the sensing electrode and the driver electrode on the xoy plane. At this time, according to the values of , , and , the installation position of the drive electrode in the z-axis direction was determined.
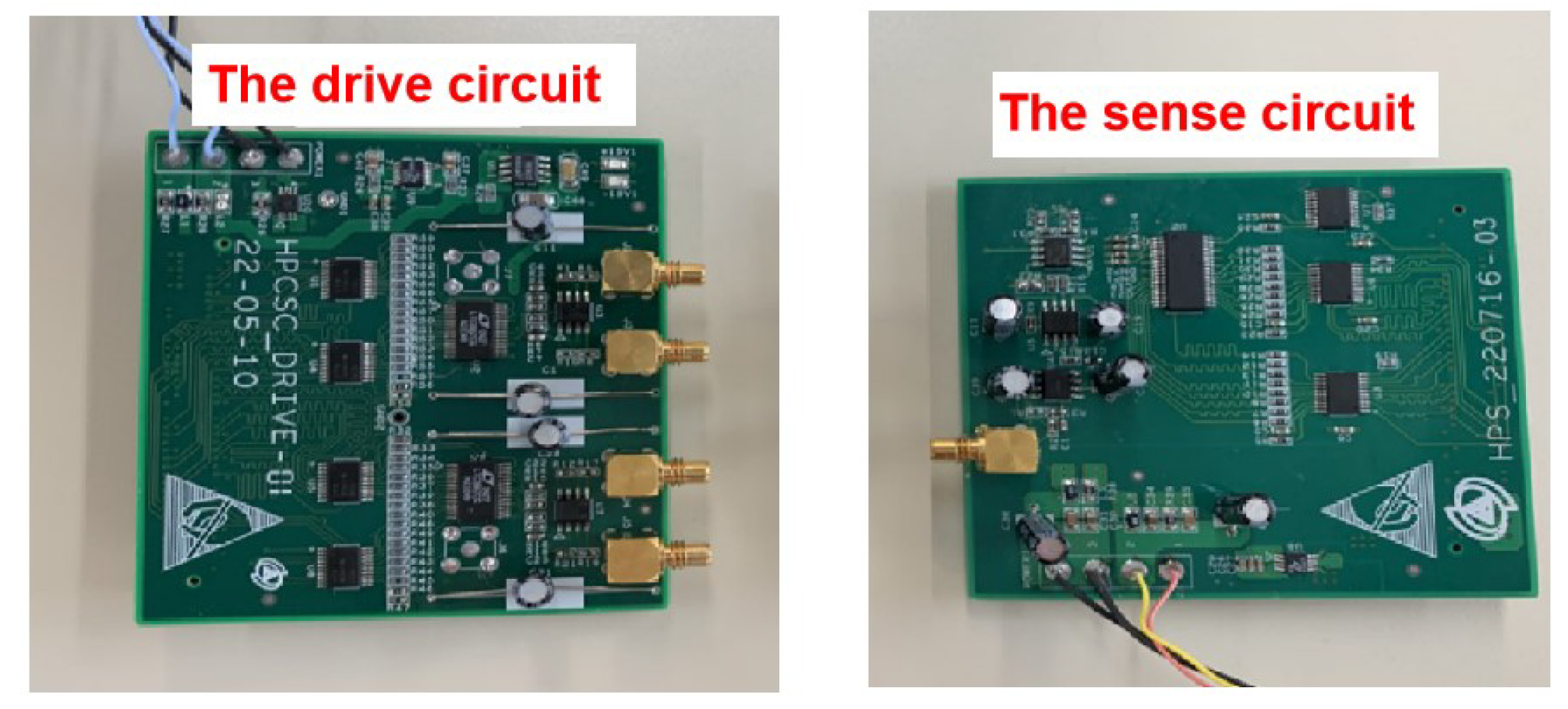
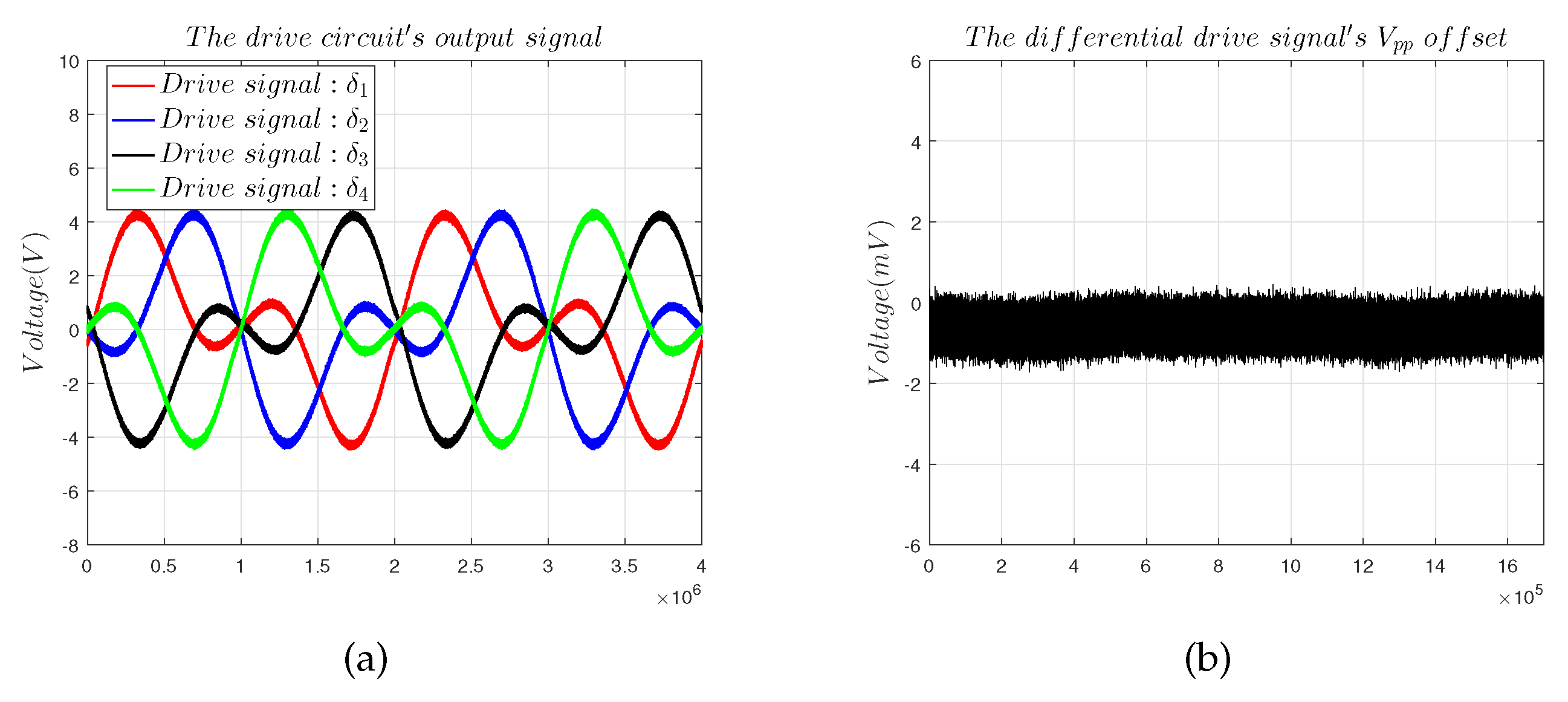
4.2. Signal Processing Circuit
4.3. Single-Axis Measurement Experiments
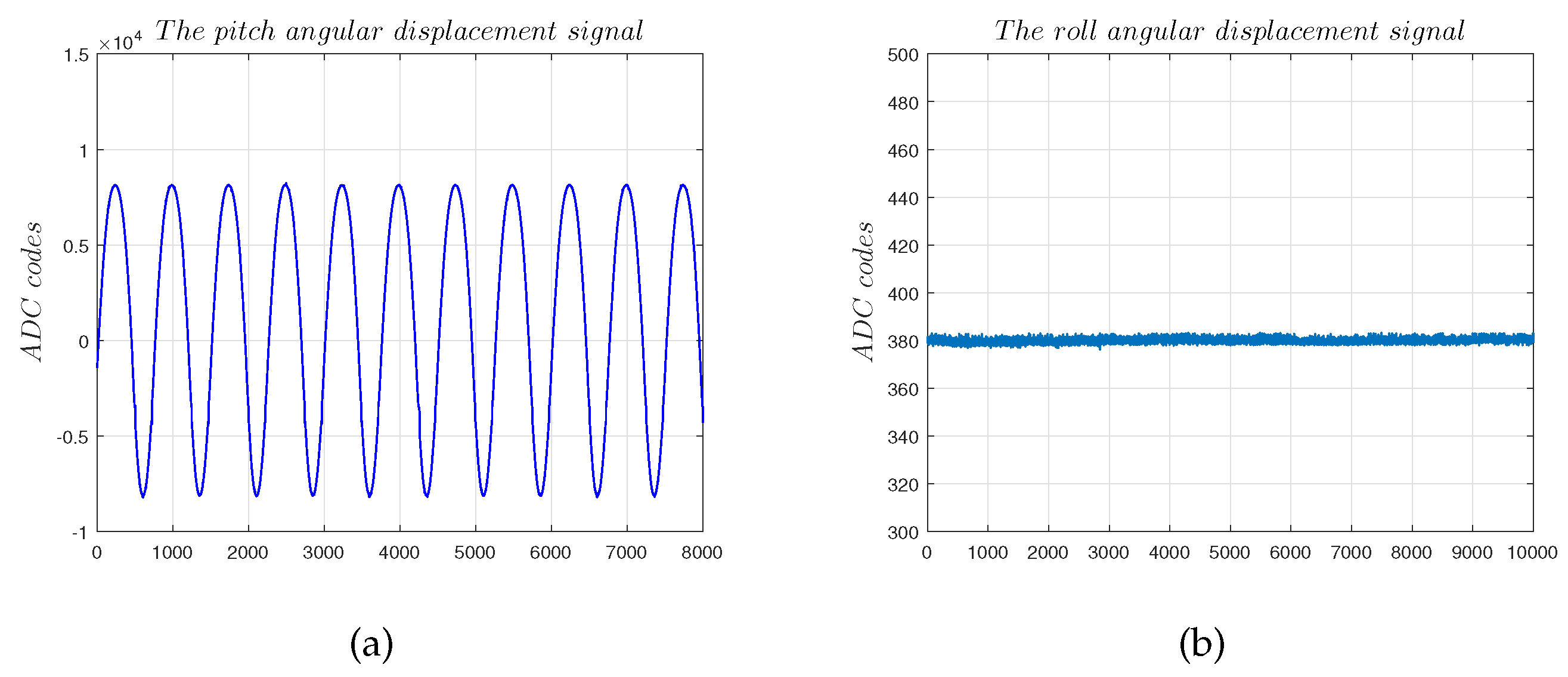
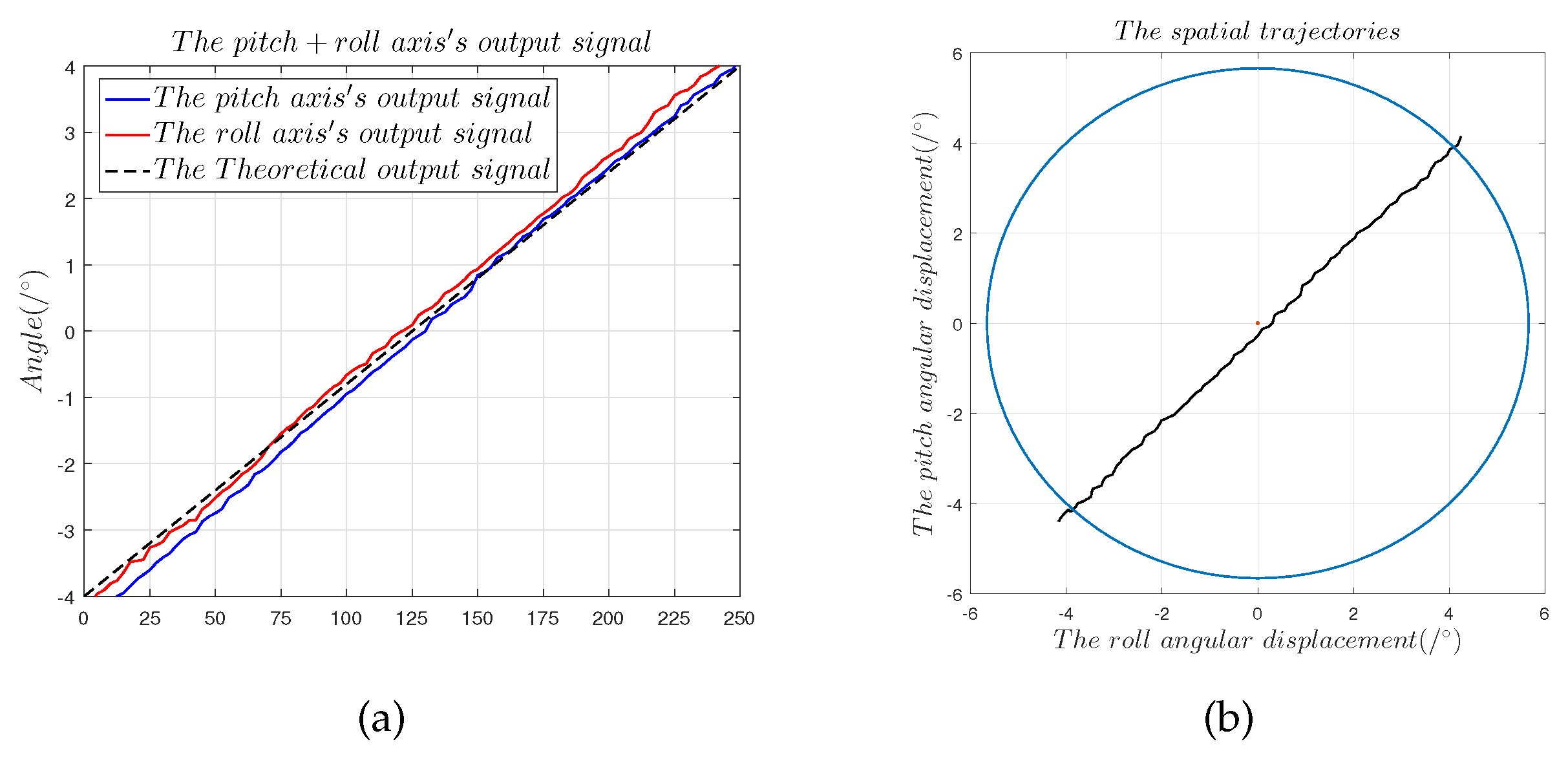
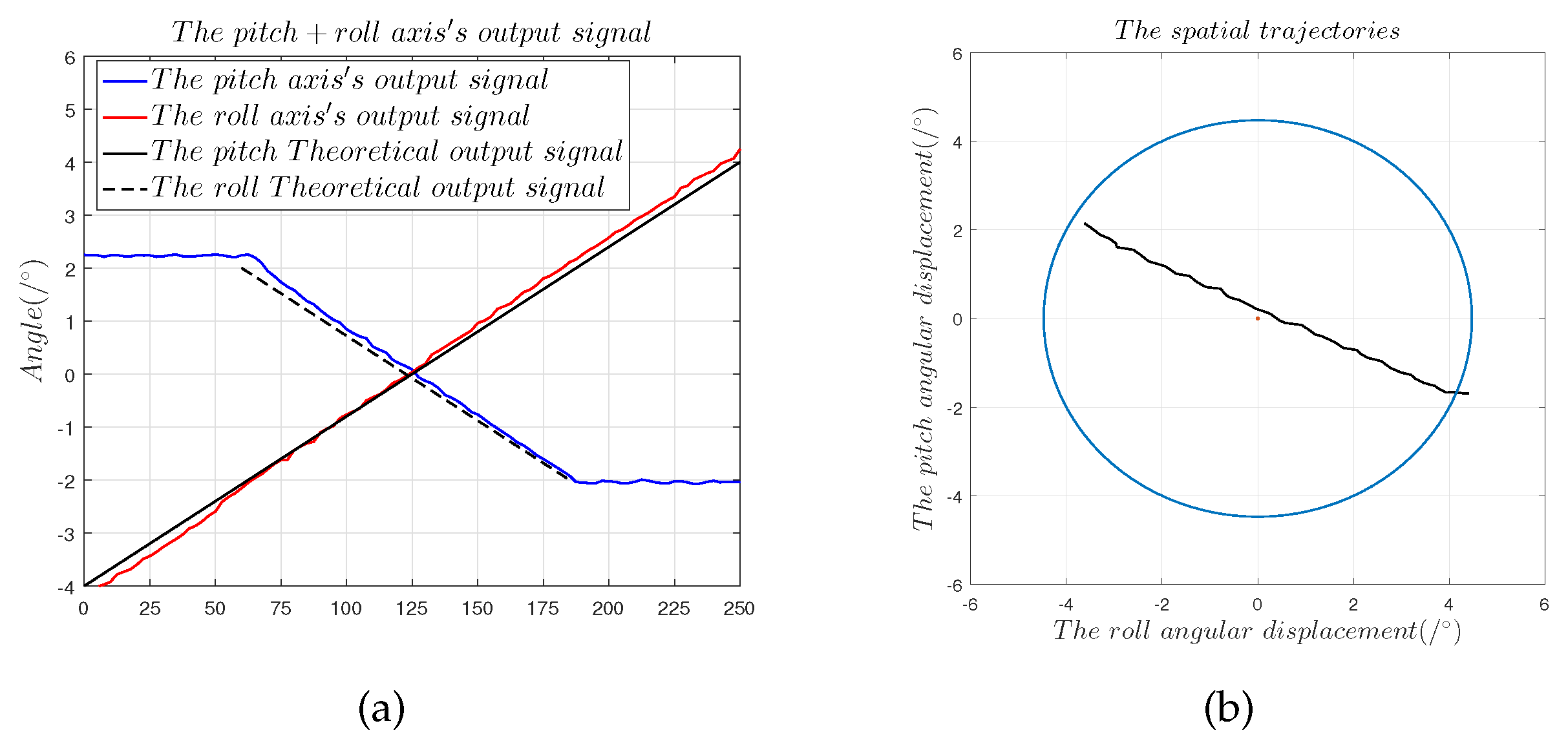
4.4. Dual-Axis Measurement Experiments
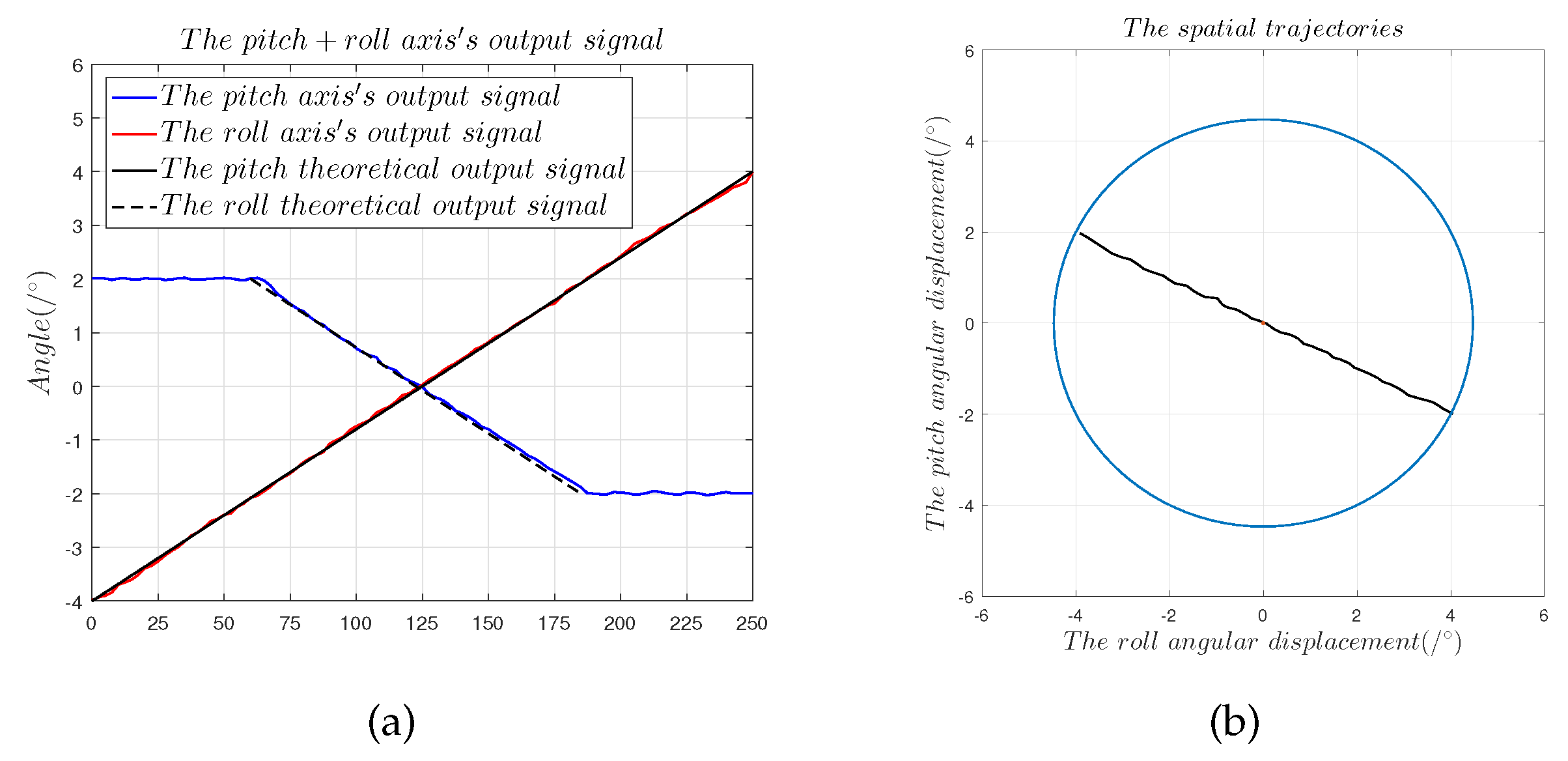
- (1)
- The spatial displacement trajectory of the spherical capacitive sensor fitted by and conformed to the motor drive trajectory, which shows that the designed spherical capacitive sensor correctly detected the 2-DOF angular motion signal when the sensing electrode moved within quadrants 1–4.
- (2)
- The maximum measurement error in the 45° direction was 0.42°, the nonlinearity error was , the zero offset error was 0.2°, and the slope offset error was , which translate to = 14.4 m.
- (3)
- The maximum measurement error in the 150° direction was 0.36°, the nonlinearity error was , the zero offset error was 0.198°, and the slope offset error was , which translate to = 14.8 m.
- (4)
- The preceding results show that the capacitive sensor with a four-quadrant differential structure is capable of strong common-mode noise rejection, which indicates that measurement error introduced by common-mode noise, the cable parasitic capacitance , and the additional capacitance introduced by edge effects do not cause a slope offset error. Equation (12) shows that only the electrode gap d can induce a slope offset error in the capacitive sensor. Thus, measurement error is mainly governed by installation error [9].
4.5. Installation Error Compensation and Correction
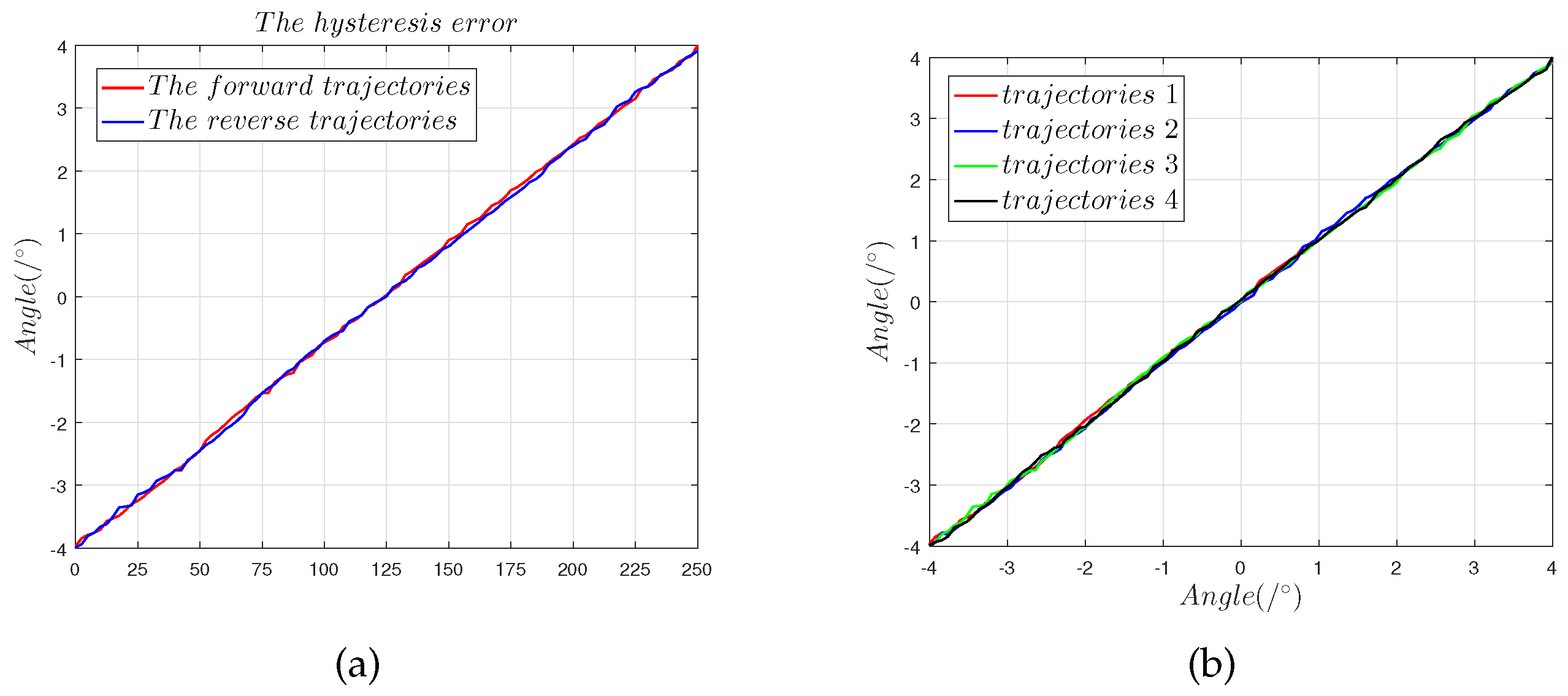
4.5.1. Hysteresis Error and Repeatability Error
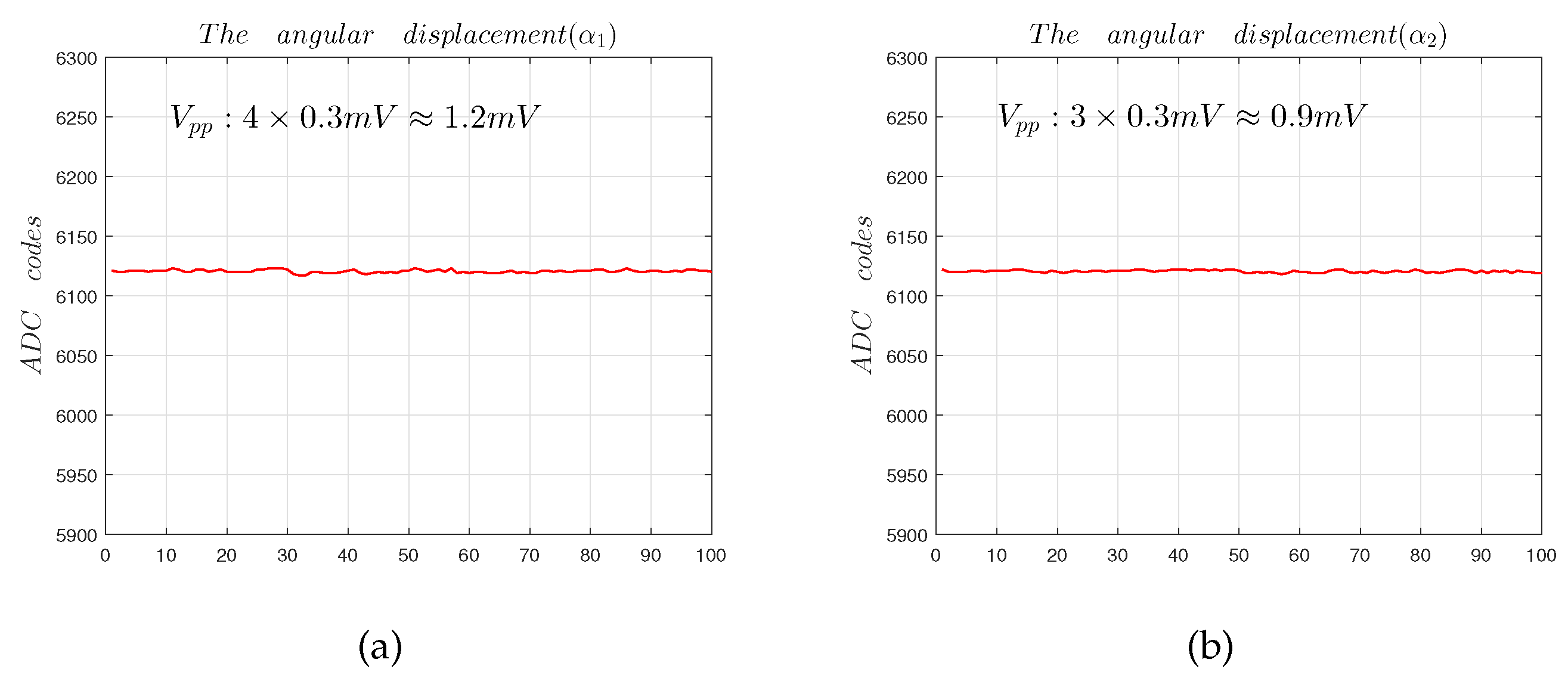
4.5.2. Sensitivity and Resolution
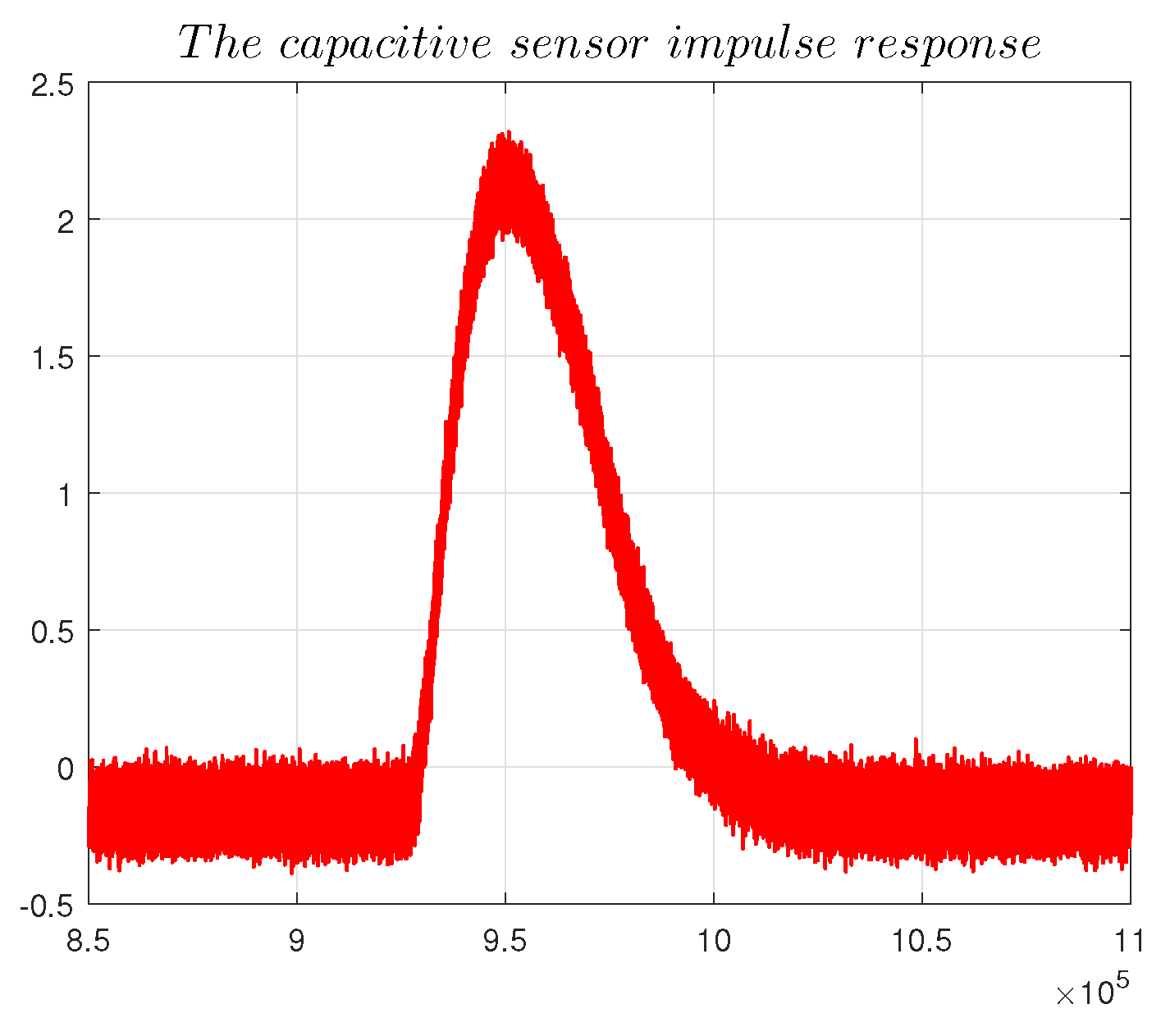
4.5.3. Impulse Response
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Leninger, B. Autonomous real-time ground ubiquitous surveillance-imaging system (ARGUS-IS). Proc.-SPIE Int. Soc. Opt. Eng. 2008, 6981, 69810H–69811H. [Google Scholar]
- Stein, D. Mathematical models of binary spherical-motion encosers. IEEE/ASME Trans. Mechatron. 2003, 8, 234–244. [Google Scholar] [CrossRef]
- Foong, S. Magnetic field-based sensing method for spherical joint. IEEE Int. Conf. Robot. Autom. 2010, 5447–5452. [Google Scholar]
- Hu, P. A New Method for Measuring the Rotational Angles of a Precision Spherical Joint Using Eddy Current Sensors. Sensors 2020, 20, 4020. [Google Scholar] [CrossRef] [PubMed]
- Vijjapu, M.T.; Fouda, M.E.; Agambayev, A.; Kang, C.H.; Lin, C.H.; Ooi, B.S.; Salama, K.N. A flexible capacitive photoreceptor for the biomimetic retina. Light Sci. Appl. 2022, 11, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Li, D.F. Recent progress of skin-integrated electronics for intelligent sensing. LAM 2021, 2, 39–58. [Google Scholar] [CrossRef]
- Zou, M. Fiber-tip polymer clamped-beam probe for high-sensitivity nanoforce measurements. LAM 2021, 10, 171. [Google Scholar] [CrossRef] [PubMed]
- Geng, Z. Review of geometric error measurement and compensation techniques of ultra-precision machine tools. LAM 2021, 2, 211–227. [Google Scholar] [CrossRef]
- Yang, S.; Xu, Y.; Xu, Y.; Ma, T.; Wang, H.; Hou, J.; Shen, H. A Novel Method for Detecting the Two-Degrees-of-Freedom Angular Displacement of a Spherical Pair, Based on a Capacitive Sensor. Sensors 2022, 22, 3437. [Google Scholar] [CrossRef] [PubMed]
- Wang, W. A Novel Method for the Micro-Clearance Measurement of a Precision Spherical Joint Based on a Spherical Differential Capacitive Sensor. Sensors 2018, 18, 3366. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, W. An Improved Capacitive Sensor for Detecting the Micro-Clearance of Spherical Joints. Sensors 2019, 19, 2694. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kui, X. A T-Type Capacitive Sensor Capable of Measuring5-DOF Error Motions of Precision Spindles. Sensors 2017, 17, 1975. [Google Scholar]
- Li, X. The influence of electric-field bending on the nonlinearity of capacitive sensors. IEEE Trans. Instrum. Meas. 2000, 49, 256–259. [Google Scholar] [CrossRef]
- Xu, L. Performance analysis of a digital capacitance measuring circuit. Rev. Sci. Instrum. 2015, 86, 054703. [Google Scholar] [CrossRef] [PubMed]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Driving Electrode | Symbol | Value | Unit |
|---|---|---|---|
| The curvature radius | 127 | mm | |
| The projection circle radius | 60 | mm | |
| thickness | 1 | m | |
| Sensing Electrode | Symbol | Value | Unit |
| Start angle | degree () | ||
| Stop angle | 4 | degree () | |
| The curvature radius | R | 126 | mm |
| The projection circle radius | r | 40 | mm |
| thickness | T | 1 | m |
| Spherical Electrode Dimensional Parameters | Dimension |
|---|---|
| The curvature radius of the driving electrode () | 127 mm |
| The curvature radius of the sensing electrode (R) | 126 mm |
| The projection circle radius of the driving electrode () | 60 mm |
| The projection circle radius of the sensing electrode (r) | 40 mm |
| The gap between the driving electrode and sensing electrode (d) | 1 mm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, T.; Yang, S.; Xu, Y.; Liu, D.; Hou, J.; Liu, Y. Analysis and Correction of Measurement Error of Spherical Capacitive Sensor Caused by Assembly Error of the Inner Frame in the Aeronautical Optoelectronic Pod. Sensors 2022, 22, 9543. https://doi.org/10.3390/s22239543
Ma T, Yang S, Xu Y, Liu D, Hou J, Liu Y. Analysis and Correction of Measurement Error of Spherical Capacitive Sensor Caused by Assembly Error of the Inner Frame in the Aeronautical Optoelectronic Pod. Sensors. 2022; 22(23):9543. https://doi.org/10.3390/s22239543
Chicago/Turabian StyleMa, Tianxiang, Shengqi Yang, Yongsen Xu, Dachuan Liu, Jinghua Hou, and Yunqing Liu. 2022. "Analysis and Correction of Measurement Error of Spherical Capacitive Sensor Caused by Assembly Error of the Inner Frame in the Aeronautical Optoelectronic Pod" Sensors 22, no. 23: 9543. https://doi.org/10.3390/s22239543