
An Efficient Approach Using Knowledge Distillation Methods to Stabilize Performance in a Lightweight Top-Down Posture Estimation Network


 ,
,
Abstract
:1. Introduction
2. Related Work
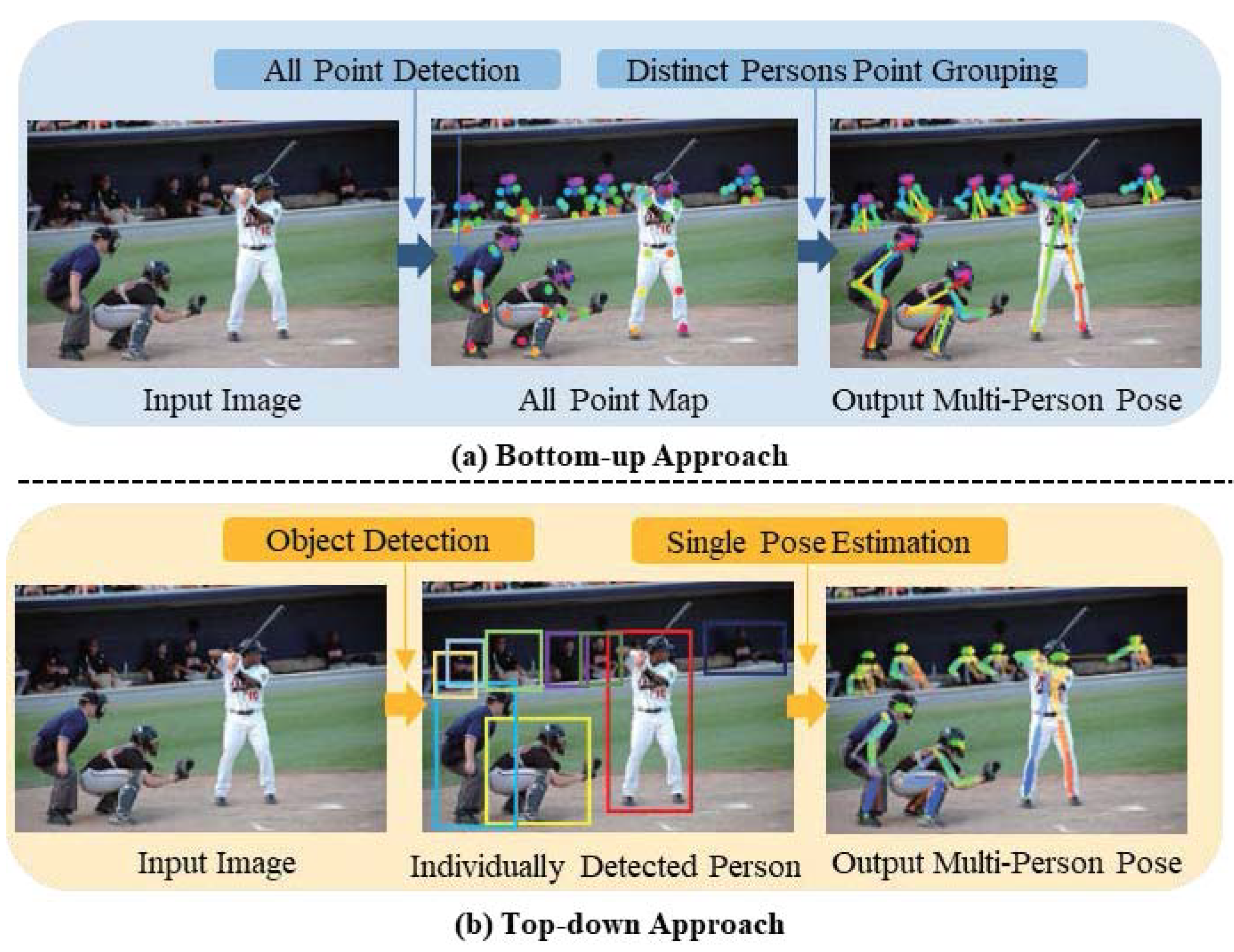
2.1. Multi-Person Pose Estimation
2.2. Lightweight Neural Network
2.3. Knowledge Distillation
3. Proposed Method
3.1. Overview
3.2. Preliminary Processing
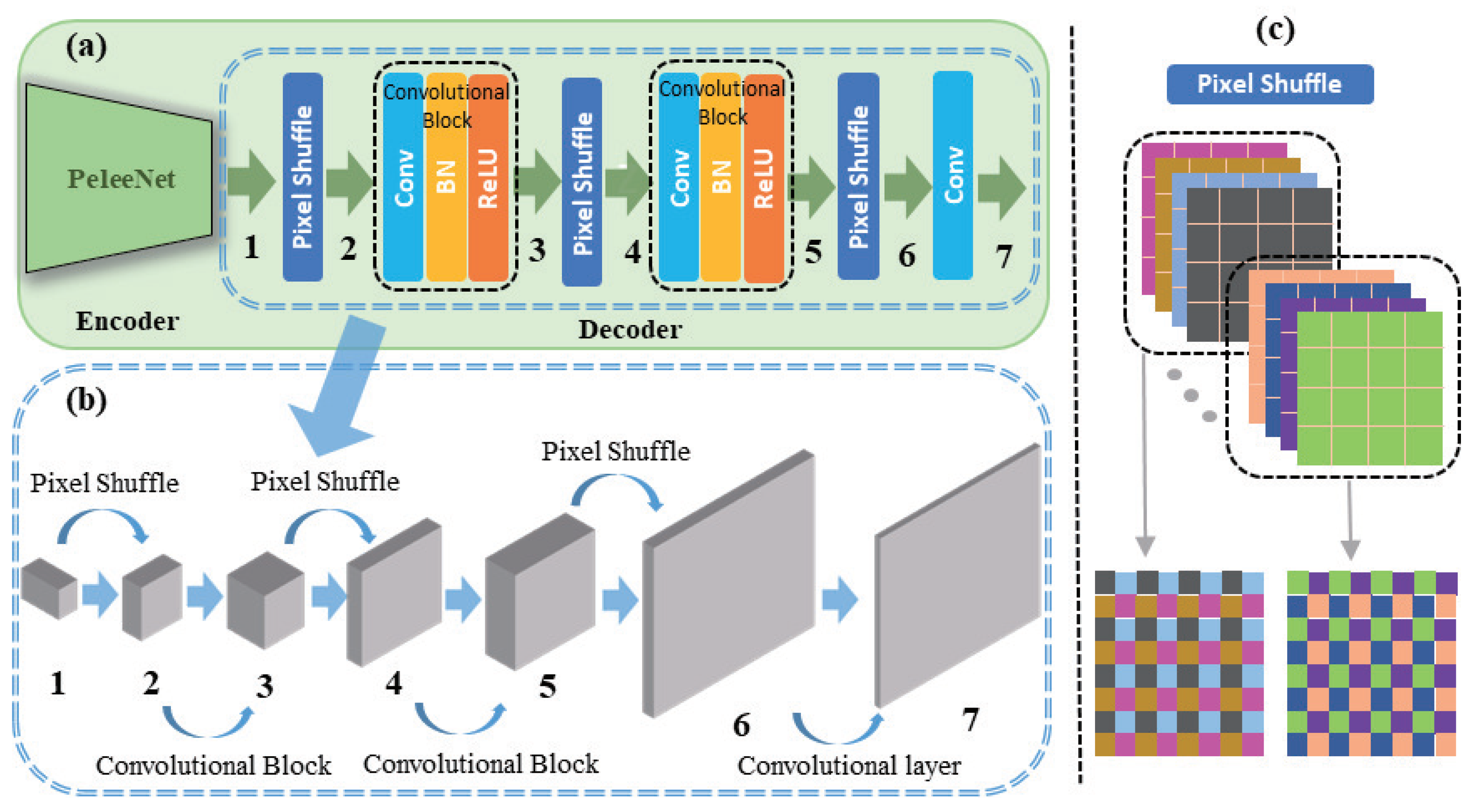
3.3. Network Architecture
3.3.1. Lightweight Network Encoder
3.3.2. Lightweight Network Decoder
3.4. Knowledge Distillation Method
4. Experiments and Results
4.1. Dataset and Evaluation Matrix
4.2. Training Details
4.3. Ablation Study
4.3.1. Lightweight Network Structure
4.3.2. Decoder Structure
4.3.3. Knowledge Distillation Method
4.4. Results and Analysis
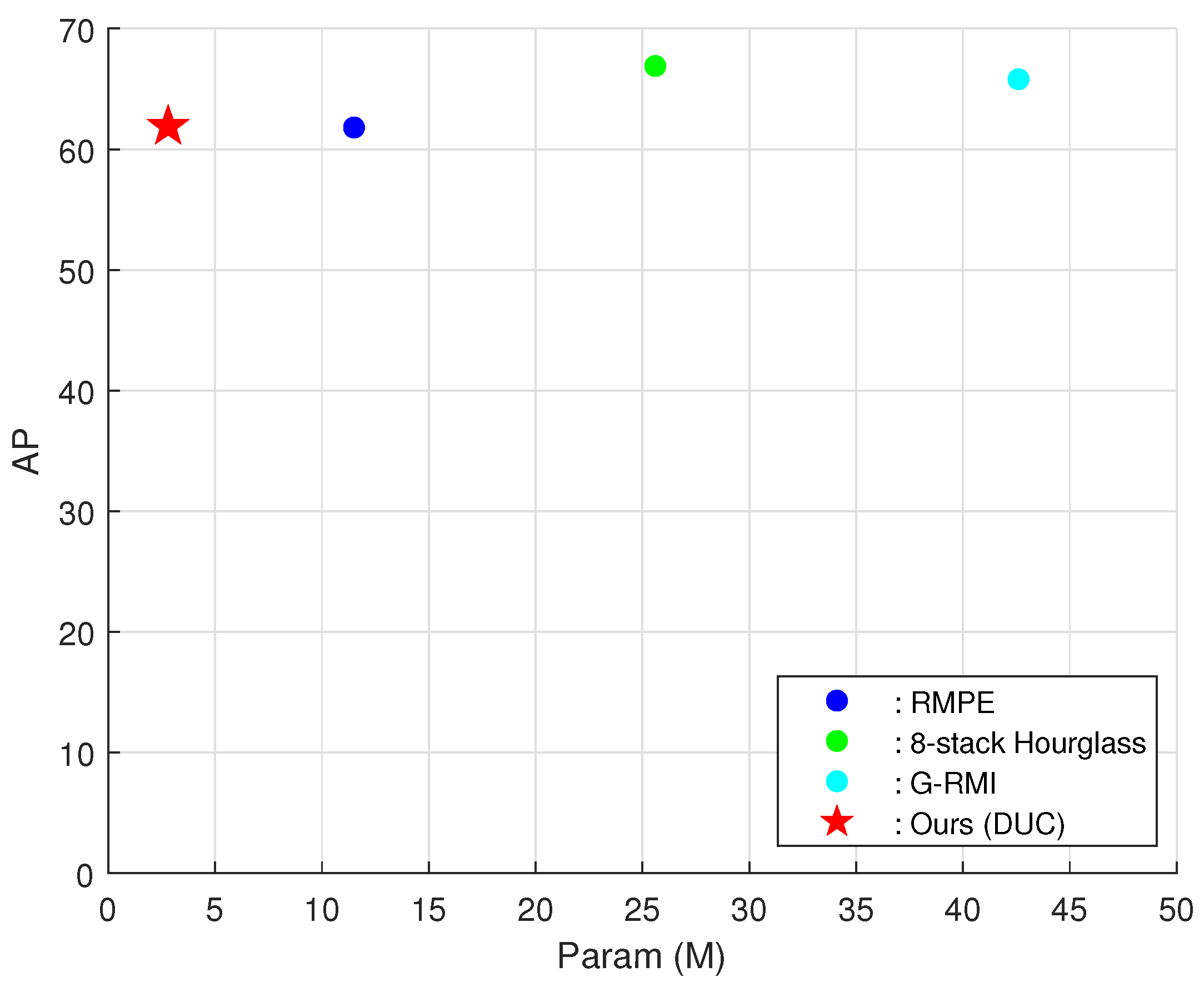
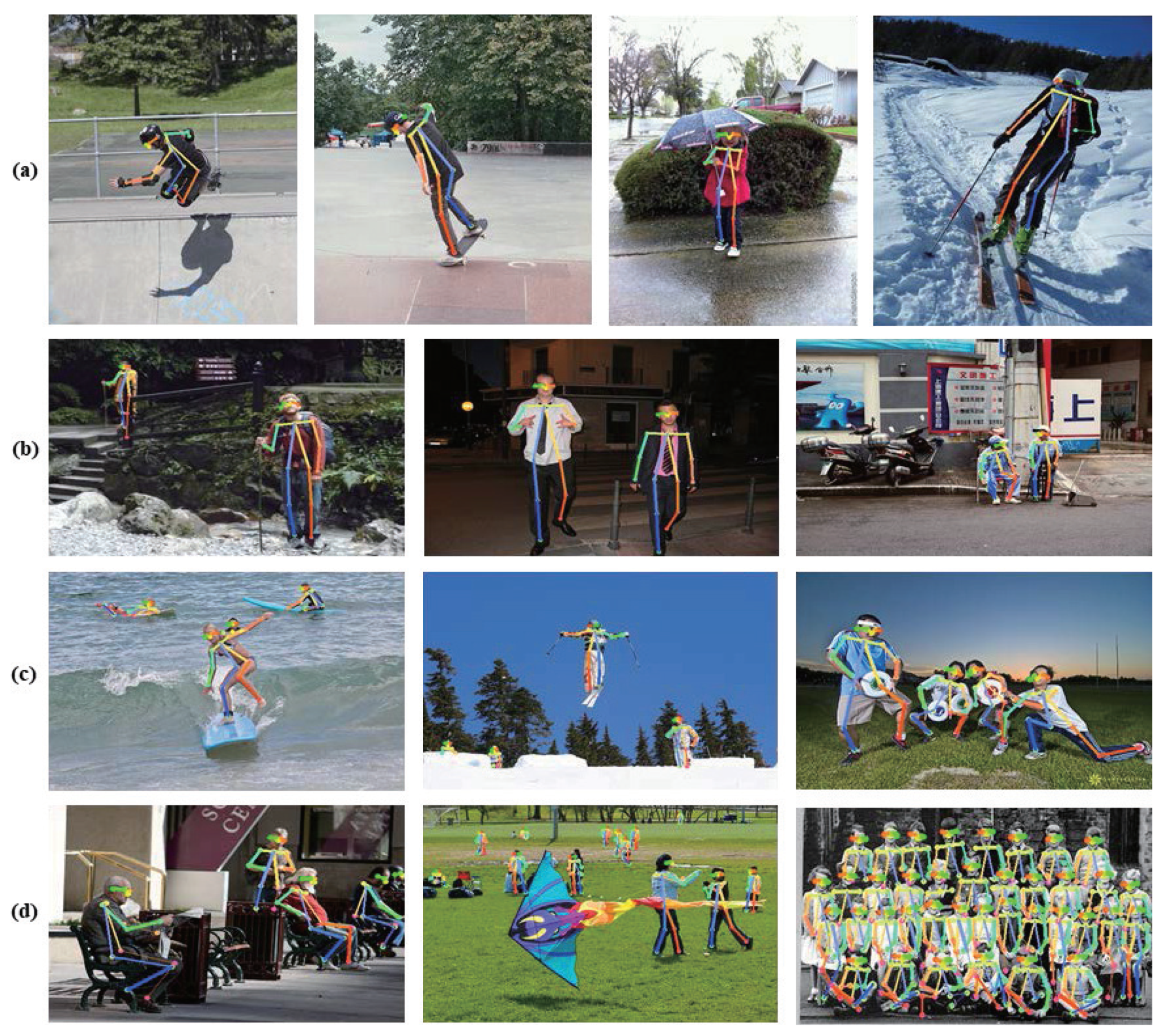
4.4.1. Overall Results
4.4.2. Discussions
4.5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, Z. Microsoft Kinect sensor and its effect. IEEE Multimed. 2012, 19, 4–10. [Google Scholar] [CrossRef] [Green Version]
- Fan, Z.; Zhao, X.; Lin, T.; Su, H. Attention-Based Multiview Re-Observation Fusion Network for Skeletal Action Recognition. IEEE Trans. Multimed. 2019, 21, 363–374. [Google Scholar] [CrossRef]
- Torres, C.; Fried, J.C.; Rose, K.; Manjunath, B.S. A multiview multimodal system for monitoring patient sleep. IEEE Trans. Multimed. 2018, 20, 3057–3068. [Google Scholar] [CrossRef] [Green Version]
- Dalal, N.; Triggs, B.; Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection to cite this version: Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; pp. 886–893. [Google Scholar]
- Wu, B.; Nevatia, R. Detection of Multiple, Partially Occluded Humans in a Single Image by Bayesian Combination of Edgelet Part Detectors. In Proceedings of the Tenth IEEE International Conference on Computer Vision (ICCV’05), Beijing, China, 17–21 October 2005. [Google Scholar]
- Yang, Y.; Ramanan, D. Articulated human detection with flexible mixtures of parts. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 35, 2878–2890. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Toshev, A.; Szegedy, C. Deeppose: Human Pose Estimation via Deep Neural Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 1653–1660. [Google Scholar]
- Zheng, C.; Wu, W.; Yang, T.; Zhu, S.; Chen, C.; Liu, R.; Shen, J.; Kehtarnavaz, N.; Shah, M. Deep learning-based human pose estimation: A survey. arXiv 2020, arXiv:2012.13392. [Google Scholar]
- Gong, W.; Zhang, X.; Gonzàlez, J.; Sobral, A.; Bouwmans, T.; Tu, C.; Zahzah, E.-H. Human Pose Estimation from Monocular Images: A Comprehensive Survey. Sensors 2016, 16, 1966. [Google Scholar] [CrossRef]
- Cao, Z.; Simon, T.; Wei, S.E.; Sheikh, Y. Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 7291–7299. [Google Scholar]
- Cao, Z.; Hidalgo Martinez, G.; Simon, T.; Wei, S.; Sheikh, Y.A. OpenPose: Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 43, 172–186. [Google Scholar] [CrossRef] [Green Version]
- Pishchulin, L.; Insafutdinov, E.; Tang, S.; Andres, B.; Andriluka, M.; Gehler, P.; Schiele, B. DeepCut: Joint Subset Partition and Labeling for Multi Person Pose Estimation. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 4929–4937. [Google Scholar]
- Insafutdinov, E.; Pishchulin, L.; Andres, B.; Andriluka, M.; Schiele, B. Deepercut: A deeper, stronger, and faster multi-person pose estimation model. In Proceedings of the European Conference on Computer Vision; Springer: Cham, Switzerland, 2016; pp. 34–50. [Google Scholar]
- Newell, A.; Huang, Z.; Deng, J. Associative embedding: End-to-end learning for joint detection and grouping. In Proceedings of the 31st International Conference on Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; pp. 1–11. [Google Scholar]
- Kocabas, M.; Karagoz, S.; Akbas, E. Multiposenet: Fast multi-person pose estimation using pose residual network. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; Springer: Berlin/Heidelberg, Germany, 2018; pp. 417–433. [Google Scholar]
- Cheng, B.; Xiao, B.; Wang, J.; Shi, H.; Huang, T.S.; Zhang, L. Higherhrnet: Scale-aware representation learning for bot-tom-up human pose estimation. In Proceedings of the International Conference on Computer Vision and Pattern Recogni-tion (CVPR), Seattle, WA, USA, 16–28 June 2020; pp. 5386–5395. [Google Scholar]
- Fang, H.-S.; Xie, S.; Tai, Y.-W.; Lu, C. RMPE: Regional Multi-person Pose Estimation. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2353–2362. [Google Scholar]
- Machine Vision and Intelligence Group. AlphaPose. Available online: https://github.com/MVIG-SJTU/AlphaPose (accessed on 5 February 2018).
- Papandreou, G.; Zhu, T.; Kanazawa, N.; Toshev, A.; Tompson, J.; Bregler, C.; Murphy, K. Towards accurate multi-person pose estimation in the wild. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4903–4911. [Google Scholar]
- Chen, Y.; Wang, Z.; Peng, Y.; Zhang, Z.; Yu, G.; Sun, J. Cascaded Pyramid Network for Multi-Person Pose Estimation. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018; pp. 7103–7112. [Google Scholar]
- Xiao, B.; Wu, H.; Wei, Y. Simple baselines for human pose estimation and tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 466–481. [Google Scholar]
- Ning, G.; Zhang, Z.; He, Z. Knowledge-guided deep fractal neural networks for human pose estimation. IEEE Trans. Multimed. 2017, 20, 1246–1259. [Google Scholar] [CrossRef] [Green Version]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 2117–2125. [Google Scholar]
- Wang, R.J.; Li, X.; Ling, C.X. Pelee: A real-time object detection system on mobile devices. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018; pp. 1963–1972. [Google Scholar]
- Wang, P.; Chen, P.; Yuan, Y.; Liu, D.; Huang, Z.; Hou, X.; Cottrell, G. Understanding Convolution for Semantic Segmentation. In Proceedings of the 2018 IEEE Winter Conference on Applications of Computer Vision (WACV), Lake Tahoe, NV, USA, 12–15 March 2018; pp. 1451–1460. [Google Scholar]
- Bissacco, A.; Yang, M.H.; Soatto, S. Fast human pose estimation using appearance and motion via multi-dimensional boosting regression. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition, Minneapolis, MN, USA, 17–22 June 2007; pp. 1–8. [Google Scholar]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft COCO: Common objects in context. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; Springer: Berlin/Heidelberg, Germany, 2014; pp. 740–755. [Google Scholar]
- Chen, S.; Saiki, S.; Nakamura, M. Nonintrusive Fine-Grained Home Care Monitoring: Characterizing Quality of In-Home Postural Changes Using Bone-Based Human Sensing. Sensors 2020, 20, 5894. [Google Scholar] [CrossRef] [PubMed]
- Lin, F.-C.; Ngo, H.-H.; Dow, C.-R.; Lam, K.-H.; Le, H.L. Student Behavior Recognition System for the Classroom Environment Based on Skeleton Pose Estimation and Person Detection. Sensors 2021, 21, 5314. [Google Scholar] [CrossRef] [PubMed]
- Sadeghi-Niaraki, A.; Choi, S.-M. A Survey of Marker-Less Tracking and Registration Techniques for Health & Environmental Applications to Augmented Reality and Ubiquitous Geospatial Information Systems. Sensors 2020, 20, 2997. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. 2015. Available online: http://www.robots.ox.ac.uk/ (accessed on 8 February 2021).
- Cheng, B.; Wei, Y.; Feris, R.; Xiong, J.; Hwu, W.M.; Huang, T.; Shi, H. Decoupled classification refinement: Hard false positive suppression for object detection. arXiv 2018, arXiv:1810.04002. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [Green Version]
- Cheng, B.; Wei, Y.; Shi, H.; Feris, R.; Xiong, J.; Huang, T. Revisiting RCNN: On awakening the classication power of Faster RCNN. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018. [Google Scholar]
- Li, X.; Lai, T.; Wang, S.; Chen, Q.; Yang, C.; Chen, R.; Lin, J.; Zheng, F. Weighted feature pyramid networks for object detection. In Proceedings of the 2019 IEEE International Conference on Parallel & Distributed Processing with Applications, Big Data & Cloud Computing, Sustainable Computing & Communications, Social Computing & Networking (ISPA/BDCloud/SocialCom/SustainCom), Xiamen, China, 16–18 December 2019 ; pp. 1500–1504. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Howard, A.G.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. Mobilenets: Efficient convolutional neural networks for mobile vision applications. arXiv 2017, arXiv:1704.04861. [Google Scholar]
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L.C. Mobilenetv2: Inverted residuals and linear bottlenecks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018; pp. 4510–4520. [Google Scholar]
- Howard, A.; Sandler, M.; Chu, G.; Chen, L.C.; Chen, B.; Tan, M.; Wang, W.; Zhu, Y.; Pang, R.; Vasudevan, V.; et al. Searching for mobilenetv3. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Korea, 27–28 October 2019; pp. 1314–1324. [Google Scholar]
- Iandola, F.; Moskewicz, M.; Karayev, S.; Girshick, R.; Darrell, T.; Keutzer, K. Densenet: Implementing Efficient Convnet Descriptor Pyramids. arXiv 2014, arXiv:1404.1869. [Google Scholar]
- ImageNet. Large Scale Visual Recognition Challenge (ILSVRC): Competition. 2012. Available online: http://www.image-net.org/challenges/LSVRC/ (accessed on 27 December 2016).
- Hinton, G.; Vinyals, O.; Dean, J. Distilling the knowledge in a neural network. arXiv 2015, arXiv:1503.02531. [Google Scholar]
- Buciluǎ, C.; Caruana, R.; Niculescu-Mizil, A. Model compression. In Proceedings of the 12th ACM SIGKDD International Conference on Knowledge Discovery And Data Mining, Philadelphia, PA, USA, 20–23 August 2006; pp. 535–541. [Google Scholar]
- Yim, J.; Joo, D.; Bae, J.; Kim, J. A gift from knowledge distillation: Fast optimization, network minimization and transfer learning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4133–4141. [Google Scholar]
- Ba, J.; Caruana, R. Do Deep Nets Really Need to Be Deep? Adv. Neural Inf. Process. Syst. 2014, 27, 2654–2662. [Google Scholar]
- Romero, A.; Ballas, N.; Kahou, S.E.; Chassang, A.; Gatta, C.; Bengio, Y. Fitnets: Hints for thin deep nets. arXiv 2014, arXiv:1412.6550. [Google Scholar]
- Lan, X.; Zhu, X.; Gong, S. Person search by multi-scale matching. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 536–552. [Google Scholar]
- Lan, X.; Zhu, X.; Gong, S. Self-referenced deep learning. In Proceedings of the Asian Conference on Computer Vision; Springer: Cham, Switzerland, 2018; pp. 284–300. [Google Scholar]
- Alashkar, T.; Jiang, S.; Wang, S.; Fu, Y. Examples-Rules Guided Deep Neural Network for Makeup Recommendation. In Proceedings of the AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017; pp. 941–947. [Google Scholar]
- Jaderberg, M.; Simonyan, K.; Zisserman, A.; Kavukcuoglu, K. Spatial Transformer Networks. In Proceedings of the International Conference on Neural Information Processing Systems, Montreal, QC, Canada, 7–12 December 2015; MIT Press: Montreal, QC, Canada, 2015; Volume 28. [Google Scholar]
- Zhang, X.; Zhou, X.; Lin, M.; Sun, J. Shufflenet: An extremely efficient convolutional neural network for mobile devices. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 6848–6856. [Google Scholar]
- Kingma, D.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Ma, N.; Zhang, X.; Zheng, H.T.; Sun, J. Shufflenet V2: Practical guidelines for efficient cnn architecture design. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 116–131. [Google Scholar]
- Tan, M.; Chen, B.; Pang, R.; Vasudevan, V.; Sandler, M.; Howard, A.; Le, Q.V. MnasNet: Platform-Aware Neural Architecture Search for Mobile. In Proceedings of the 2019 Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; Available online: https://arxiv.org/abs/1807.11626 (accessed on 29 May 2019).
- Newell, A.; Yang, K.; Deng, J. Stacked Hourglass Networks for Human Pose Estimation. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 483–499. [Google Scholar]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 13–16 December 2015; pp. 2961–2969. [Google Scholar]
- Andriluka, M.; Pishchulin, L.; Gehler, P.; Schiele, B. 2D Human Pose Estimation: New Benchmark and State of the Art Analysis. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 3686–3693. [Google Scholar]
- Tang, Z.; Peng, X.; Geng, S.; Wu, L.; Zhang, S.; Metaxas, D. Quantized Densely Connected U-Nets for Efficient Landmark Localization. In Proceedings of the 2018 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar]
- Tang, W.; Yu, P.; Wu, Y. Deeply learned compositional models for human pose estimation. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 190–206. [Google Scholar]
- Bulat, A.; Kossaifi, J.; Tzimiropoulos, G.; Pantic, M. Toward fast and accurate human pose estimation via soft-gated skip connections. In Proceedings of the 2020 15th IEEE International Conference on Automatic Face and Gesture Recognition (FG 2020), Buenos Aires, Argentina, 16–20 November 2020; pp. 8–15. [Google Scholar]
- Groos, D.; Ramampiaro, H.; Ihlen, E.A. EfficientPose: Scalable single-person pose estimation. Appl. Intell. 2020, 51, 2518–2533. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stage | Layer | Output Shape | |
|---|---|---|---|
| Input | |||
| DUC Stage 0 | PixelShuffle | PixelShuffle | |
| Convolutional Block | conv2d | ||
| BatchNorm2d | |||
| ReLU | |||
| DUC Stage 1 | PixelShuffle | PixelShuffle | |
| Convolutional Block | conv2d | ||
| BatchNorm2d | |||
| ReLU | |||
| DUC Stage 2 | PixelShuffle | PixelShuffle | |
| Convolutional layer | conv2d | ||
| Encoder | AP | Param (M) | FLOPS (G) | ||||
|---|---|---|---|---|---|---|---|
| Hourglass (4-stack) | 64.8 | 82.1 | 71.3 | 60.6 | 71.6 | 26.0 | 46.6 |
| Hourglass (2-stack) | 62.6 | 81.1 | 69.0 | 58.2 | 69.4 | 13.5 | 23.3 |
| Hourglass (1-stack) | 55.4 | 78.8 | 60.9 | 51.0 | 62.4 | 7.17 | 11.7 |
| ShufflenetV2 [54] | 52.5 | 76.9 | 57.5 | 48.2 | 59.1 | 2.73 | 1.26 |
| MobileNetV3 [40] | 60.8 | 81.1 | 67.9 | 56.2 | 68.0 | 3.94 | 1.36 |
| MobileNetV2 [39] | 56.1 | 79.0 | 62.0 | 52.1 | 63.0 | 4.54 | 2.12 |
| MobileNetV1 [38] | 54.8 | 77.9 | 59.9 | 50.1 | 61.7 | 4.69 | 2.11 |
| MnasNet [55] | 57.7 | 79.4 | 63.8 | 53.9 | 64.5 | 5.42 | 2.14 |
| PeleeNet | 61.9 | 82.0 | 68.5 | 57.6 | 68.7 | 2.80 | 1.49 |
| Encoder | Decoder | Decoder Param (M) | Decoder FLOPS (G) | AP |
|---|---|---|---|---|
| PeleeNet | Deconv (512 512 512) | 14.11 | 34.49 | 62.8 |
| Deconv (256 256 256) | 4.98 | 9.19 | 63.5 | |
| Deconv (128 128 128) | 1.98 | 2.58 | 62.8 | |
| Deconv (64 64 64) | 0.86 | 0.79 | 43.3 | |
| Half-step deconv | 5.21 | 4.58 | 63.4 | |
| Ours | 0.71 | 0.47 | 61.9 |
| Encoder | Decoder | AP | |
|---|---|---|---|
| PeleeNet | DUC | 0.3 | 59.6 |
| 0.4 | 59.6 | ||
| 0.5 | 60.4 | ||
| 0.6 | 60.6 | ||
| 0.7 | 61.5 | ||
| 0.8 | 61.9 | ||
| 0.9 | 61.6 | ||
| 1.0 | 60.9 |
| Method | Encoder | Decoder | AP | Param (M) | FLOPS (G) |
|---|---|---|---|---|---|
| RMPE | 4-stack hourglass | Deconv | 62.3 | 14.8 | - |
| 8-Stage Hourglass | Hourglass | (dev) | 66.9 | 25.6 | 26.2 |
| G-RMI | ResNet-101 | (dev) | 65.8 | 42.6 | 57.0 |
| Ours | PeleeNet | DUC | 61.9 | 2.80 | 1.49 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, C.; Lee, H.S.; Kim, W.J.; Bae, H.B.; Lee, J.; Lee, S. An Efficient Approach Using Knowledge Distillation Methods to Stabilize Performance in a Lightweight Top-Down Posture Estimation Network. Sensors 2021, 21, 7640. https://doi.org/10.3390/s21227640
Park C, Lee HS, Kim WJ, Bae HB, Lee J, Lee S. An Efficient Approach Using Knowledge Distillation Methods to Stabilize Performance in a Lightweight Top-Down Posture Estimation Network. Sensors. 2021; 21(22):7640. https://doi.org/10.3390/s21227640
Chicago/Turabian StylePark, Changhyun, Hean Sung Lee, Woo Jin Kim, Han Byeol Bae, Jaeho Lee, and Sangyoun Lee. 2021. "An Efficient Approach Using Knowledge Distillation Methods to Stabilize Performance in a Lightweight Top-Down Posture Estimation Network" Sensors 21, no. 22: 7640. https://doi.org/10.3390/s21227640