
Development of an Easy-to-Operate Underwater Raman System for Deep-Sea Cold Seep and Hydrothermal Vent In Situ Detection

Abstract
:1. Introduction
2. System Configuration
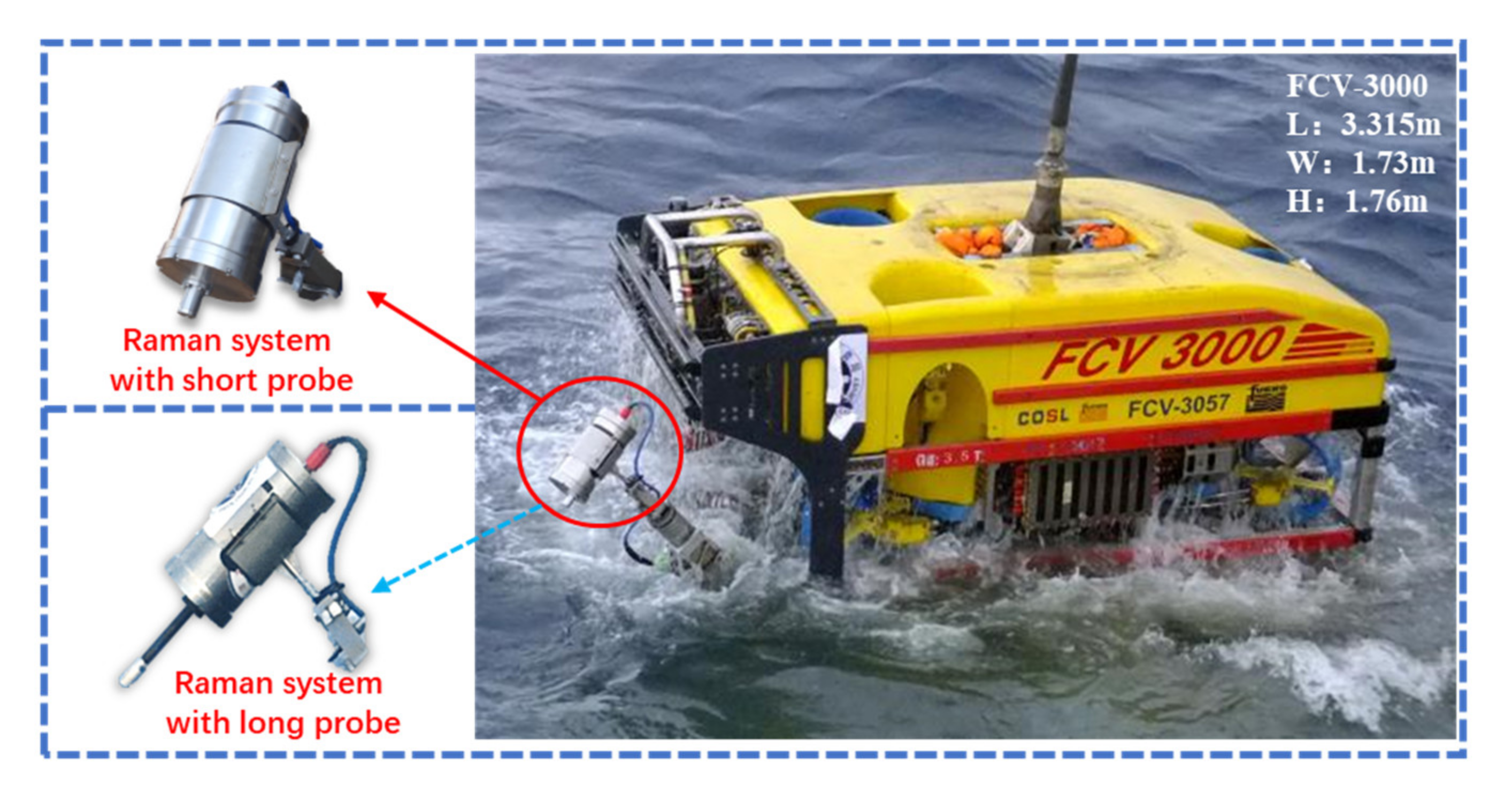
2.1. Overview of the System
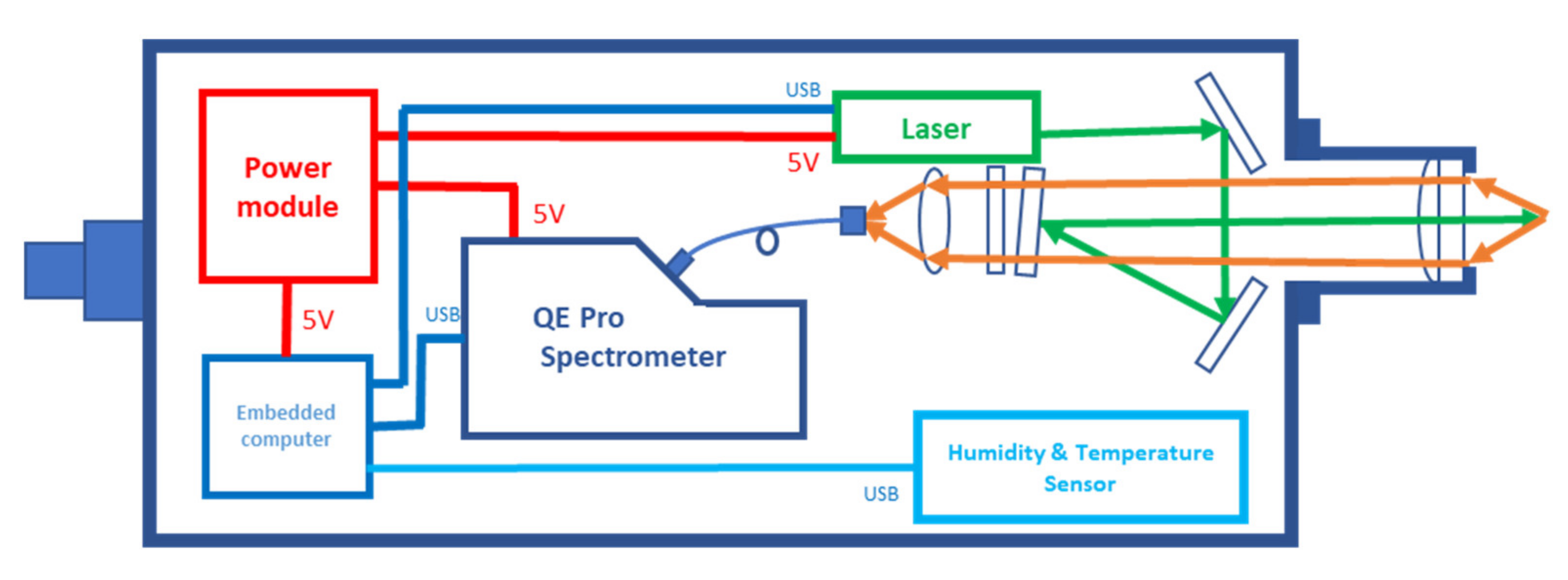
2.2. Optical Layout
2.2.1. Spectral Coverage
2.2.2. Excitation Source
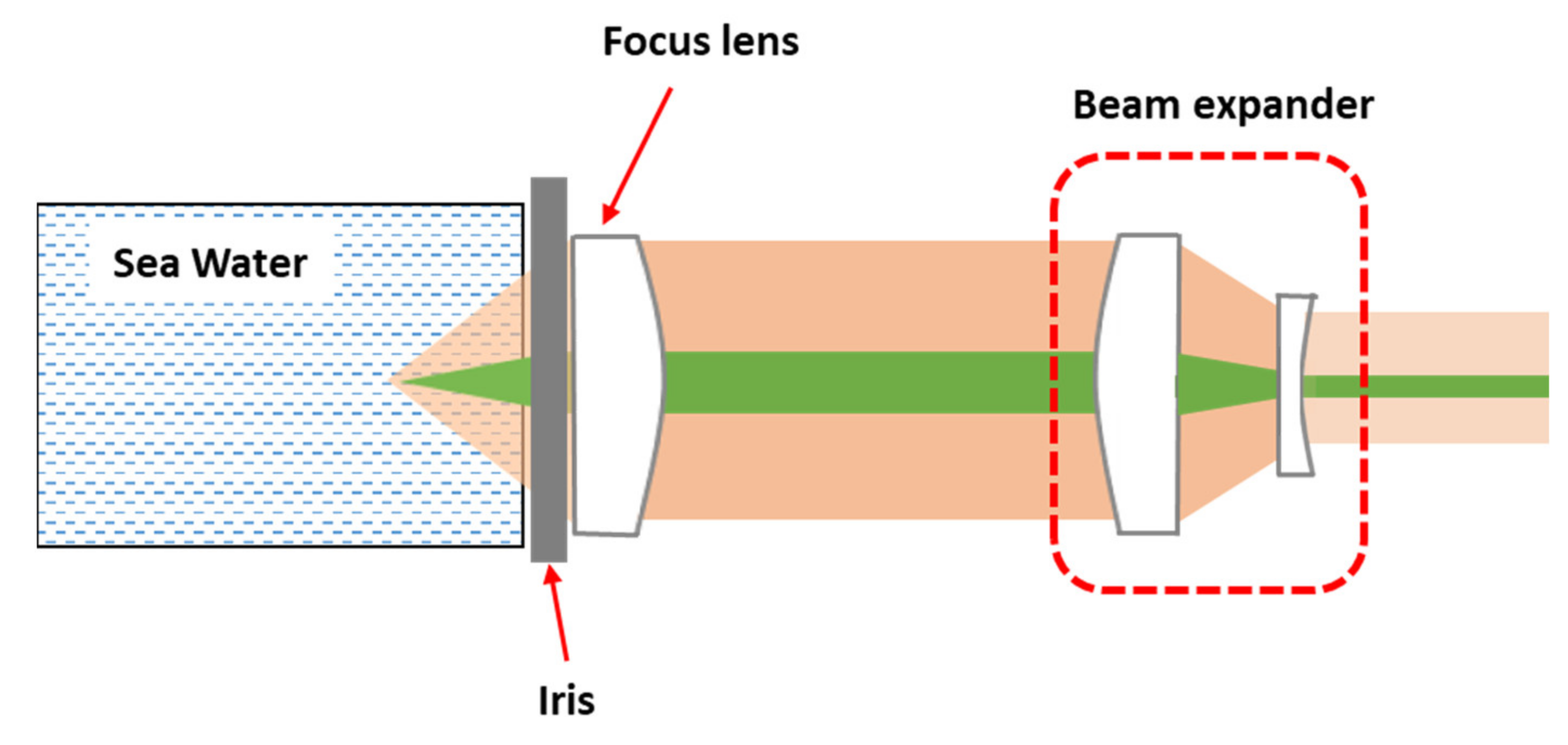
2.2.3. Excitation/Collection Optical Layout
2.3. Electronic Module
3. Results and Discussion
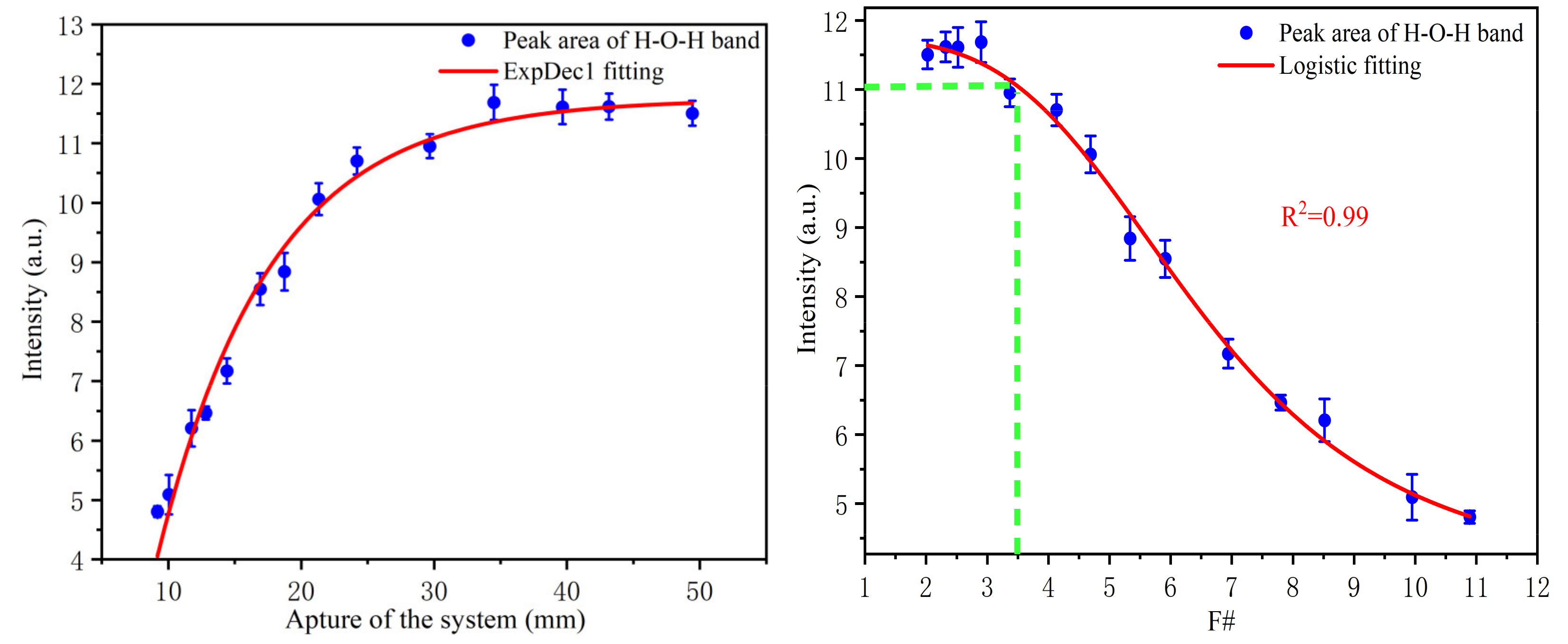
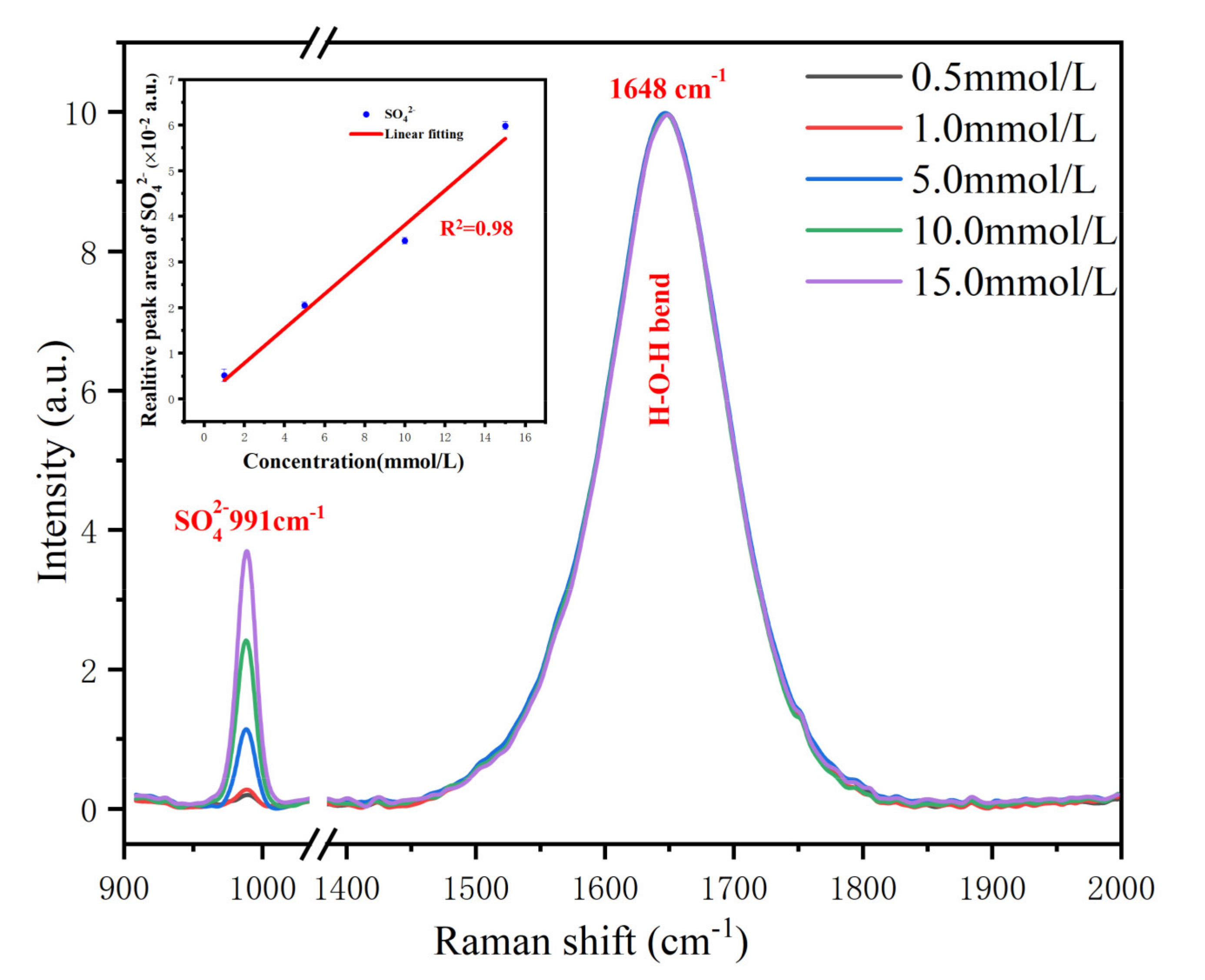
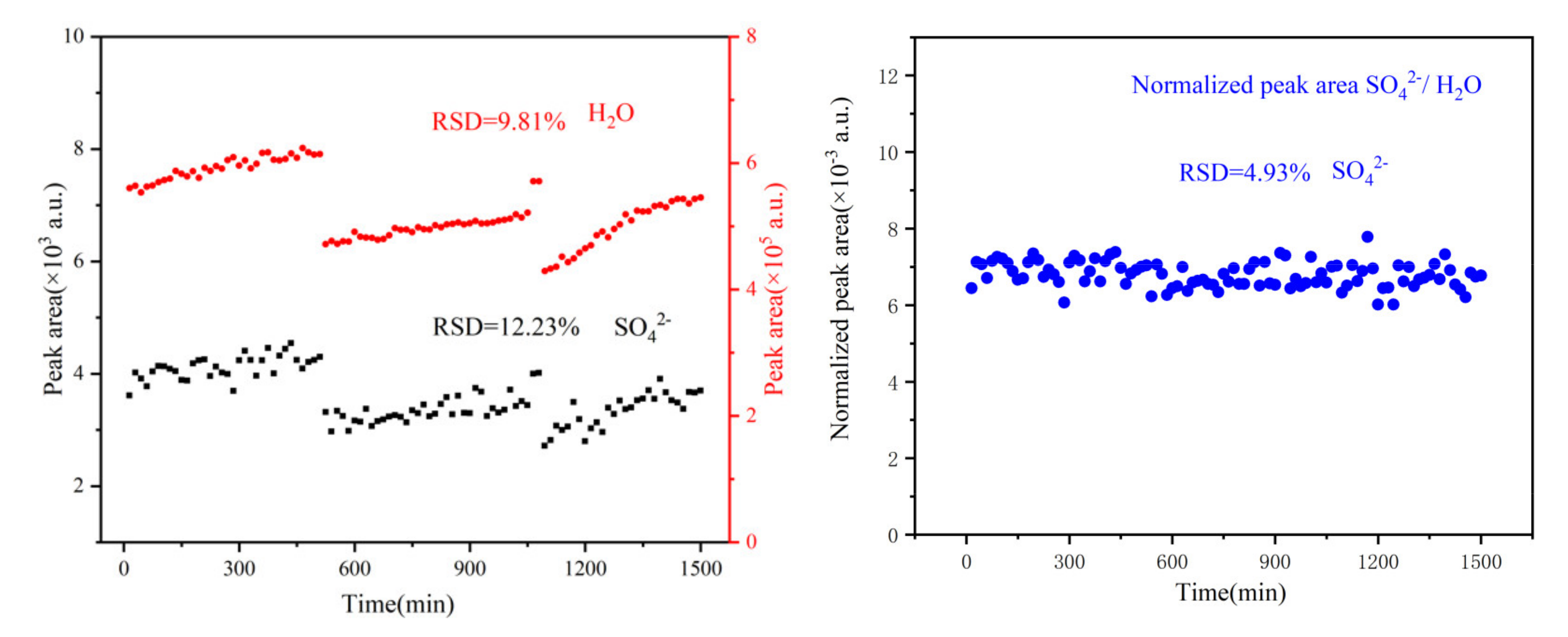
3.1. System Evaluation in Terms of the Limit of Detection and Stability
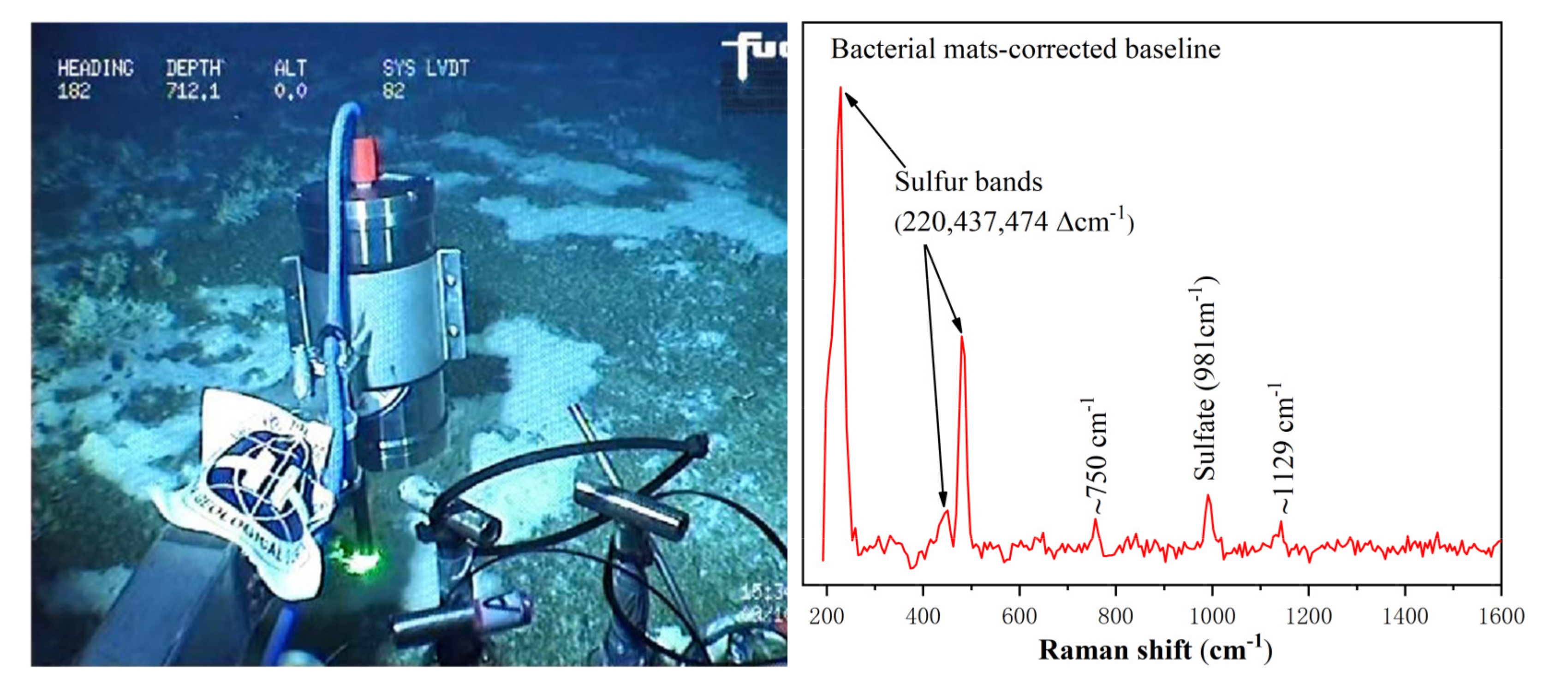
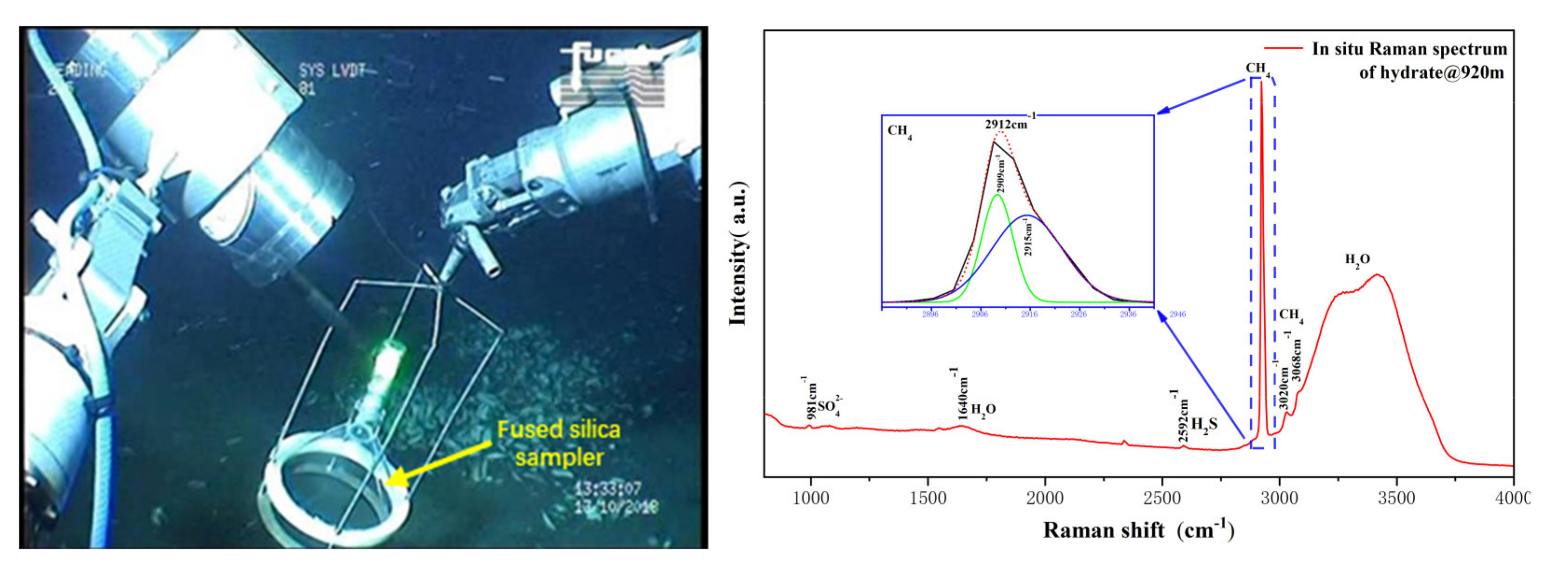
3.2. Sea Trials and Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Brewer, P.G.; Malby, G.; Pasteris, J.D.; White, S.N.; Peltzer, E.T.; Wopenka, B.; Freeman, J.; Brown, M.O. Development of a laser Raman spectrometer for deep-ocean science. Deep Sea Res. Part I Oceanogr. Res. Pap. 2004, 51, 739–753. [Google Scholar] [CrossRef]
- Sherman, A.D.; Walz, P.M.; Brewer, P.G. Two generations of deep-ocean Raman in-situ spectrometers. Sea Technol. 2007, 48, 10–13. [Google Scholar]
- Zhang, X.; Du, Z.; Zheng, R.; Luan, Z.; Qi, F.; Cheng, K.; Wang, B.; Ye, W.; Liu, X.; Lian, C.; et al. Development of a new deep-sea hybrid Raman insertion probe and its application to the geochemistry of hydrothermal vent and cold seep fluids. Deep Sea Res. Part I Oceanogr. Res. Pap. 2017, 123, 1–12. [Google Scholar] [CrossRef]
- Du, Z.; Li, Y.; Chen, J.; Guo, J.; Zheng, R.E. Feasibility investigation on deep ocean compact autonomous Raman spectrometer developed for in-situ detection of acid radical ions. Chin. J. Oceanol. Limnol. 2015, 33, 545–550. [Google Scholar] [CrossRef]
- Guo, J.; Ye, W.; Liu, Q.; Qi, F.; Cheng, K.; Yang, D.; Zheng, R. Development of a compact deep-sea Raman spectroscopy system and direct bicarbonate detection in sea trials. Appl. Opt. 2019, 58, 2630. [Google Scholar] [CrossRef] [PubMed]
- Ye, W.; Guo, J.; Li, N.; Qi, F.; Cheng, K.; Zheng, R. Depth Profiling Investigation of Seawater Using Combined Multi-Optical Spectrometry. Appl. Spectrosc. 2020, 74, 563–570. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Qi, F.; Ye, W.; Cheng, K.; Guo, J.; Zheng, R. Analysis and Modeling Methodologies for Heat Exchanges of Deep-Sea In Situ Spectroscopy Detection System Based on ROV. Sensors 2018, 18, 2729. [Google Scholar] [CrossRef] [Green Version]
- Ruffine, L.; Ondreas, H.; Blanc-Valleron, M.; Teichert, B.M.A.; Scalabrin, C.; Rinnert, E.; Birot, D.; Croguennec, C.; Ponzevera, E.; Pierre, C.; et al. Multidisciplinary investigation on cold seeps with vigorous gas emissions in the Sea of Marmara (MarsiteCruise): Strategy for site detection and sampling and first scientific outcome. Deep Sea Res. Part II Top. Stud. Oceanogr. 2018, 153, 36–47. [Google Scholar] [CrossRef] [Green Version]
- Peltzer, E.T.; Zhang, X.; Walz, P.M.; Luna, M.; Brewer, P.G. In situ Raman measurement of H.S.−and H2S in sediment pore waters and use of the HS−:H2S ratio as an indicator of pore water pH. Mar. Chem. 2016, 184, 32–42. [Google Scholar] [CrossRef]
- Zhang, X.; Walz, P.M.; Kirkwood, W.J.; Hester, K.C.; Ussler, W.; Peltzer, E.T.; Brewer, P.G. Development and deployment of a deep-sea Raman probe for measurement of pore water geochemistry. Deep Sea Res. Part I Oceanogr. Res. Pap. 2010, 57, 297–306. [Google Scholar] [CrossRef]
- White, S.N. Laser Raman spectroscopy as a technique for identification of seafloor hydrothermal and cold seep minerals. Chem. Geol. 2009, 259, 240–252. [Google Scholar] [CrossRef]
- Xi, S.; Zhang, X.; Luan, Z.; Du, Z.; Li, L.; Liang, Z.; Lian, C.; Yan, J. Micro-Raman Study of Thermal Transformations of Sulfide and Oxysalt Minerals Based on the Heat Induced by Laser. Minerals 2019, 9, 751. [Google Scholar] [CrossRef] [Green Version]
- White, S.N.; Dunk, R.M.; Peltzer, E.T.; Freeman, J.J.; Brewer, P.G. In situ Raman analyses of deep-sea hydrothermal and cold seep systems (Gorda Ridge and Hydrate Ridge). Geochem. Geophys. Geosystems 2006, 7, 5. [Google Scholar] [CrossRef]
- Hester, K.C.; Dunk, R.M.; White, S.N.; Brewer, P.G.; Peltzer, E.T.; Sloan, E.D. Gas hydrate measurements at Hydrate Ridge using Raman spectroscopy. Geochim. Cosmochim. Acta 2007, 71, 2947–2959. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Du, Z.; Luan, Z.; Wang, X.; Xi, S.; Wang, B.; Li, L.; Lian, C.; Yan, J. In Situ Raman Detection of Gas Hydrates Exposed on the Seafloor of the South China Sea. Geochem. Geophys. Geosystems 2017, 18, 3700–3713. [Google Scholar] [CrossRef]
- Du, Z.; Zhang, X.; Xi, S.; Li, L.; Luan, Z.; Lian, C.; Wang, B.; Yan, J. In situ Raman spectroscopy study of synthetic gas hydrate formed by cold seep flow in the South China Sea. J. Asian Earth Sci. 2018, 168, 197–206. [Google Scholar] [CrossRef]
- Li, L.; Zhang, X.; Luan, Z.; Du, Z.; Xi, S.; Wang, B.; Cao, L.; Lian, C.; Yan, J. In Situ Quantitative Raman Detection of Dissolved Carbon Dioxide and Sulfate in Deep-Sea High-Temperature Hydrothermal Vent Fluids. Geochem. Geophys. Geosystems 2018, 19, 1809–1823. [Google Scholar] [CrossRef]
- Du, Z.; Zhang, X.; Luan, Z.; Wang, M.; Xi, S.; Li, L.; Wang, B.; Cao, L.; Lian, C.; Li, C.; et al. In situ Raman Quantitative Detection of the Cold Seep Vents and Fluids in the Chemosynthetic Communities in the South China Sea. Geochem. Geophys. Geosystems 2018, 19, 2049–2061. [Google Scholar] [CrossRef] [Green Version]
- Breier, J.A.; White, S.N.; German, C.R. Mineral–microbe interactions in deep-sea hydrothermal systems: A challenge for Raman spectroscopy. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2010, 368, 3067–3086. [Google Scholar] [CrossRef] [PubMed]
- Lin, D.H.M.; Manara, D.; Lindqvist-Reis, P.; Fanghänel, T.; Mayer, K. The use of different dispersive Raman spectrometers for the analysis of uranium compounds. Vib. Spectrosc. 2014, 73, 102–110. [Google Scholar]
- Vandenabeele, P.; Edwards, H.G.M.; Jehli Ka, J. The role of mobile instrumentation in novel applications of Raman spectroscopy: Archaeometry, geosciences, and forensics. Chem. Soc. Rev. 2014, 43, 2628–2649. [Google Scholar] [CrossRef]
- Jehlička, J.; Culka, A.; Vandenabeele, P.; Edwards, H.G.M. Critical evaluation of a handheld Raman spectrometer with near infrared (785nm) excitation for field identification of minerals. Spectrochim. Acta Part A Mol. Biomol. Spectrosc. 2011, 80, 36–40. [Google Scholar] [CrossRef]
- Wagner, R.E.; Tomlinson, W.J. Coupling efficiency of optics in single-mode fiber components. Appl. Opt. 1982, 21, 2671. [Google Scholar] [CrossRef]
- Rull, F.; Maurice, S.; Hutchinson, I.; Moral, A.; Perez, C.; Diaz, C.; Colombo, M.; Belenguer, T.; Lopez-Reyes, G.; Sansano, A.; et al. The Raman Laser Spectrometer for the ExoMars Rover Mission to Mars. Astrobiology 2017, 17, 627–654. [Google Scholar] [CrossRef] [Green Version]
- Zalevsky, Z. Extended depth of focus imaging: A review. J. Photon. Energy 2010, 018001. [Google Scholar] [CrossRef] [Green Version]
- Jannasch, H.W.; Wirsen, C.O. Morphological survey of microbial mats near deep-sea thermal vents. Appl. Environ. Microbiol. 1981, 41, 528–538. [Google Scholar] [CrossRef] [Green Version]
- Jacq, E.; Prieur, D.; Nichols, P.; White, D.C.; Porter, T.; Geesey, G.G. Microscopic examination and fatty acid characterisation of filamentous bacteria colonising substrata around subtidal hydrothermal vents. Arch. Microbiol. 1989, 152, 64–71. [Google Scholar] [CrossRef]
- Nelson, D.C.; Wirsen, C.O.; Jannasch, H.W. Characterisation of Large, Autotrophic Beggiatoa spp. Abundant at Hydrothermal Vents of the Guaymas Basin. Appl. Environ. Microbiol. 1989, 55, 2909–2917. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dworkin, M.; Falkow, S.; Rosenberg, E.; Schleifer, K.H.; Stackebrandt, E. The Genera Beggiatoa and Thioploca. Prokaryotes 2006, 6, 784–810. [Google Scholar]
- White, S.N.; Kirkwood, W.; Sherman, A.; Brown, M.; Henthorn, R.; Salamy, K.; Walz, P.; Peltzer, E.T.; Brewer, P.G. Development and deployment of a precision underwater positioning system for in situ laser Raman spectroscopy in the deep ocean. Deep Sea Res. Part I Oceanogr. Res. Pap. 2005, 52, 2376–2389. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Module | Apparatus | Specifications |
|---|---|---|
| Mechanics | Chamber | Material: TC4 |
| Size: 362 × 172 mm (length × diameter) | ||
| Weight: 20 kg (in air)/12 kg (in water) | ||
| Maximum work depth: 5000 m | ||
| Optics | Exciting wavelength | Wavelength: 532 nm |
| Energy: 0–200 mW | ||
| Spectral range and resolution | Spectral range: 537–700 nm | |
| Spectral resolution: ~0.16 nm | ||
| Short universal probe | Length: 60 mm long | |
| Aperture: 10 mm | ||
| Work distance (from the target to the optic window): 25 mm | ||
| Pressure resistance: 50 MPa | ||
| Long insert probe | Length: 178 mm | |
| Aperture: 6 mm | ||
| Work distance (from the target to the optic window): 18 mm | ||
| Pressure resistance: 50 MPa | ||
| Layout | Backscattering collection | |
| Electronics | Power supply | 24V DC from ROV (≥60 W) |
| Embedded computer | Advantech PCM-3363 | |
| Communication | Ethernet (10–100 Mbps) | |
| Serial port (RS-232) |
| Property | DORISS (MBARI) | DORISSII(MBARI) | DOCARS (OUC) | RiPs (IOCAS) | The Developed System |
|---|---|---|---|---|---|
| Dimension | 1450 × 720 × 420 mm (L × W × H) | 305 × 762 mm (Φ × L) | 258 × 800 mm (Φ × L) | / | 172 × 362 mm (Φ × L) |
| Weights | 220 kg in air/66 kg in water | 140.6 kg in air | 60 kg in air | / | 20 kg in air/12 kg in water |
| Structure | Two capsules plus probe | One capsule plus probe | One capsule | One capsule plus probe | One capsule |
| Exciting wavelength | 532 nm | 532 nm | 532 nm | 532 nm | 532 nm |
| LOD(SO42−) | 1.6 mmol/L | \ | 0.4 mmol/L | 0.6 mmol/L | 0.7 mmol/L |
| Working depth | ≤4000 m | ≤4000 m | ≤4000 m | ≤6000 m | ≤4000 m |
| Sample (Composition) | Mode | Raman Shift (cm−1) | Peak Location * (nm) | |
|---|---|---|---|---|
| Mineral | Anhydrite (CaSO4) | ν1 | 1017 | 562.4 |
| ν2 | 417, 499 | 544, 546.5 | ||
| ν3 | 1110, 1128, 1160 | 565.4, 565.9, 567 | ||
| ν4 | 608, 628, 675 | 549.8, 550.4, 551.8 | ||
| Gypsum (CaSO4·2H2O) | ν1 | 1008 | 562.1 | |
| ν2 | 415, 494 | 544, 546.4 | ||
| ν3 | 1136 | 566.2 | ||
| ν4 | 620, 671 | 550.1, 551.7 | ||
| Barite (BaSO4) | ν1 | 988 | 561.5 | |
| ν2 | 452, 462 | 545.1, 545.4 | ||
| ν3 | 1141 | 566.4 | ||
| ν4 | 617 | 550.1 | ||
| Pyrite (FeS2) | ν1 | 343 | 541.9 | |
| ν2 | 379 | 542.9 | ||
| ν3 | 430 | 544.5 | ||
| Marcasite (FeS2) | ν1 | 323, 386 | 541.3, 543.2 | |
| ν2 | 342, 377 | 542.9, 543.2 | ||
| S8 | ν1 | 476 | 545.8 | |
| ν2 | 219 | 538.3 | ||
| ν3 | 411 | 543.9 | ||
| ν4 | 234.4 | 538.7 | ||
| Calcite | ν1 | 1099 | 565.0 | |
| ν2 | 876 | 558.0 | ||
| ν3 | 1435, 1444 | 576.0,576.3 | ||
| ν4 | 724 | 553.3 | ||
| Aragonite | ν1 | 1085 | 564.6 | |
| ν3 | 1464, 1466 | 576.9, 577.0 | ||
| ν4 | 704 | 552.7 | ||
| Gas | CO2 | ν1 | 1387 | 574.4 |
| 2ν2 | 1285 | 571.0 | ||
| CH4 | ν1 | 2917 | 629.5 | |
| ν2 | 1534 | 579.3 | ||
| ν3 | 3020 | 633.8 | ||
| ν4 | 1306 | 571.7 | ||
| 2ν2 | 3068 | 635.8 | ||
| H2 | Q1 (0) | 4162 | 683.3 | |
| Q1 (1) | 4156 | 683.0 | ||
| Q1 (2) | 4144 | 682.5 | ||
| Q1 (3) | 4126 | 681.6 | ||
| H2S | ν1 | 2592 | 617.1 | |
| Solution | SO42− | ν1 | 981 | 561.3 |
| CO32− | ν1 | 1064 | 563.9 | |
| ν2 | 880 | 558.1 | ||
| ν3 | 1395 | 574.6 | ||
| ν4 | 686 | 552.1 | ||
| HCO3− | ν3 | 1364 | 573.6 | |
| ν5 | 1011 | 562.2 | ||
| HS− | ν1 | 2573 | 616.4 | |
| H2O | ν1 | 3450 | 651.6 | |
| ν2 | 1640 | 582.9 | ||
| ν3 | 3650 | 660.2 | ||
| Organic | β-Carotenoid | ν1 | 1515 | 578.6 |
| ν2 | 1130 | 566.0 | ||
| ν3 | 1000 | 561.9 | ||
| ν4 | 1270 | 570.5 |
| Probe |  |  |
| Focal length (in water) | 23 | 35 |
| Working distance in water | 18 | 25 |
| Aperture | 6 | 10 |
| F/# | 3.8 | 3.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Guo, J.; Ye, W.; Cheng, K.; Qi, F.; Zheng, R.; Sun, Z.; Zhang, X. Development of an Easy-to-Operate Underwater Raman System for Deep-Sea Cold Seep and Hydrothermal Vent In Situ Detection. Sensors 2021, 21, 5090. https://doi.org/10.3390/s21155090
Liu Q, Guo J, Ye W, Cheng K, Qi F, Zheng R, Sun Z, Zhang X. Development of an Easy-to-Operate Underwater Raman System for Deep-Sea Cold Seep and Hydrothermal Vent In Situ Detection. Sensors. 2021; 21(15):5090. https://doi.org/10.3390/s21155090
Chicago/Turabian StyleLiu, Qingsheng, Jinjia Guo, Wangquan Ye, Kai Cheng, Fujun Qi, Ronger Zheng, Zhilei Sun, and Xilin Zhang. 2021. "Development of an Easy-to-Operate Underwater Raman System for Deep-Sea Cold Seep and Hydrothermal Vent In Situ Detection" Sensors 21, no. 15: 5090. https://doi.org/10.3390/s21155090