In this section, the results for the work are carefully presented. The section starts by presenting the simulation scenario, as well as the parameters used for the communication channel and the different algorithms. To train the different machine learning algorithms, different positions from the previously presented simulation scenario were used. The output of the antenna array (which was obtained by properly combining each antenna output) for each given position was computed by the algorithm, then the score was computed by using Equation (
7), and subsequently, the algorithms were updated in an unsupervised manner. Finally, a carefully evaluation of the results in terms of several metrics is presented.
4.1. Simulation Scenario and Parameters
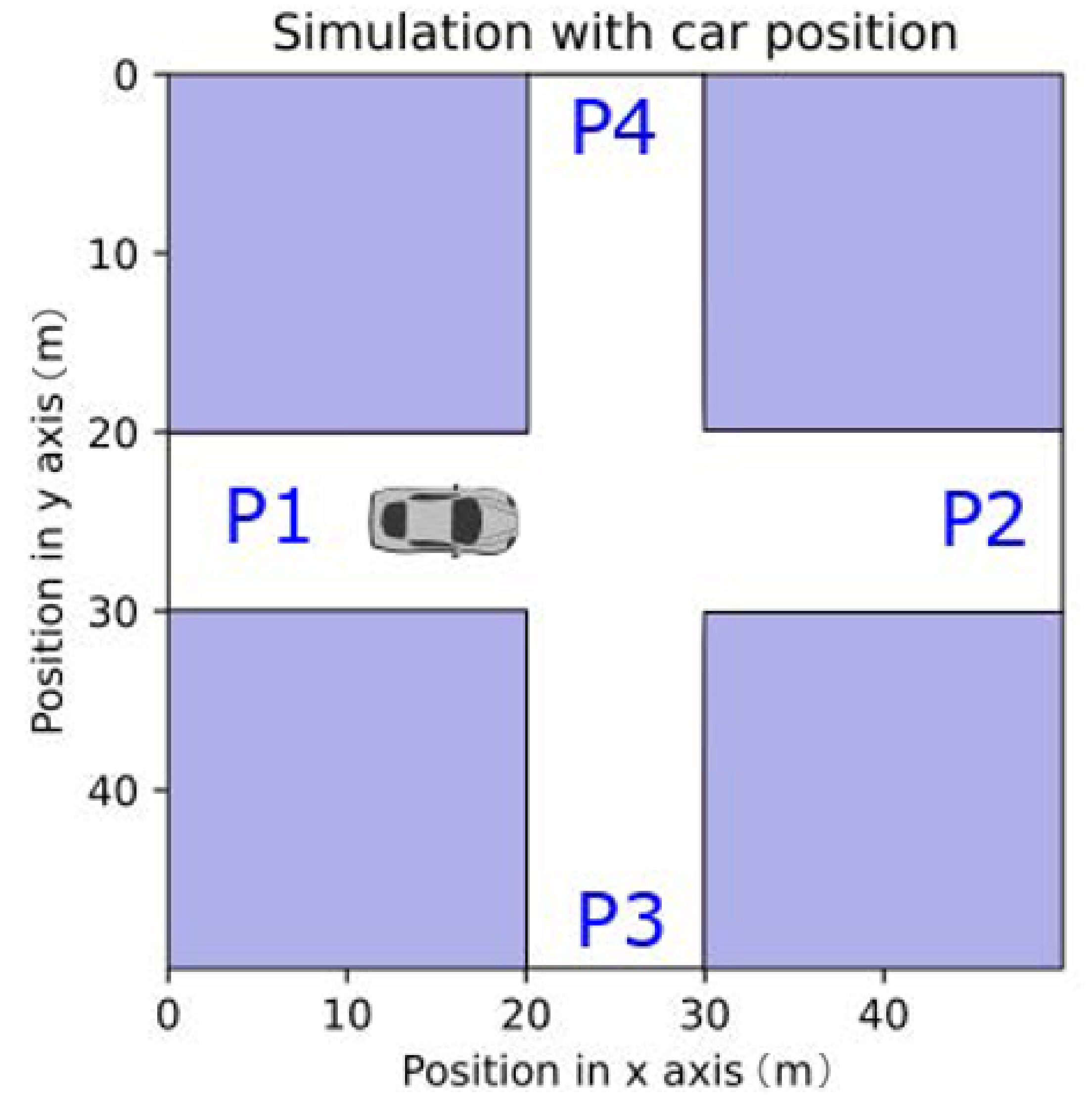
The general simulation scenario is presented in
Figure 4. The sections in the white represent the roads in the simulation scenario, and the sections in blue represent the buildings. The car in
Figure 4 represents a possible position for the vehicle in the simulation scenario.
Because of the symmetries present in the simulation scenarios, obtaining results from the left side of the horizontal lane was, on average, the same as obtaining results from every position in the simulation scenario. Taking into account this particularity, all the positions for the cars were considered on the left side of the horizontal road.
Furthermore, as the work focused on increasing the communication range for urban V2V communications, the evaluation of the model was done by only considering a single transmitting and receiving vehicle. This simplification had the downside of not taking vehicular density into account. The reason vehicular density was not taken into account was that the work focused on comparing different communication schemes in the same simulation scenario. While taking the vehicular density into account would make the results more accurate, it would affect the communication schemes similarly, and thus, the comparison would be similar. Besides, the complexity of a simulation setup that considers the impact of the vehicular density is much greater, and consequently, the interpretation of the results would also be, so this analysis was outside the scope of this research work.
Nevertheless, the effect of vehicular density in the resulting performance is an interesting point to consider, and thus, it is proposed as future work. To consider this effect, the simulation scenario should be extended to consider multiple vehicles communicating at the same time, and consider the link layer protocols specified in the IEEE 802.11p standard [
15]. Interestingly, considering vehicular density might benefit learned beam shapes even further, since models could learn to better utilize the channel by separating it spatially.
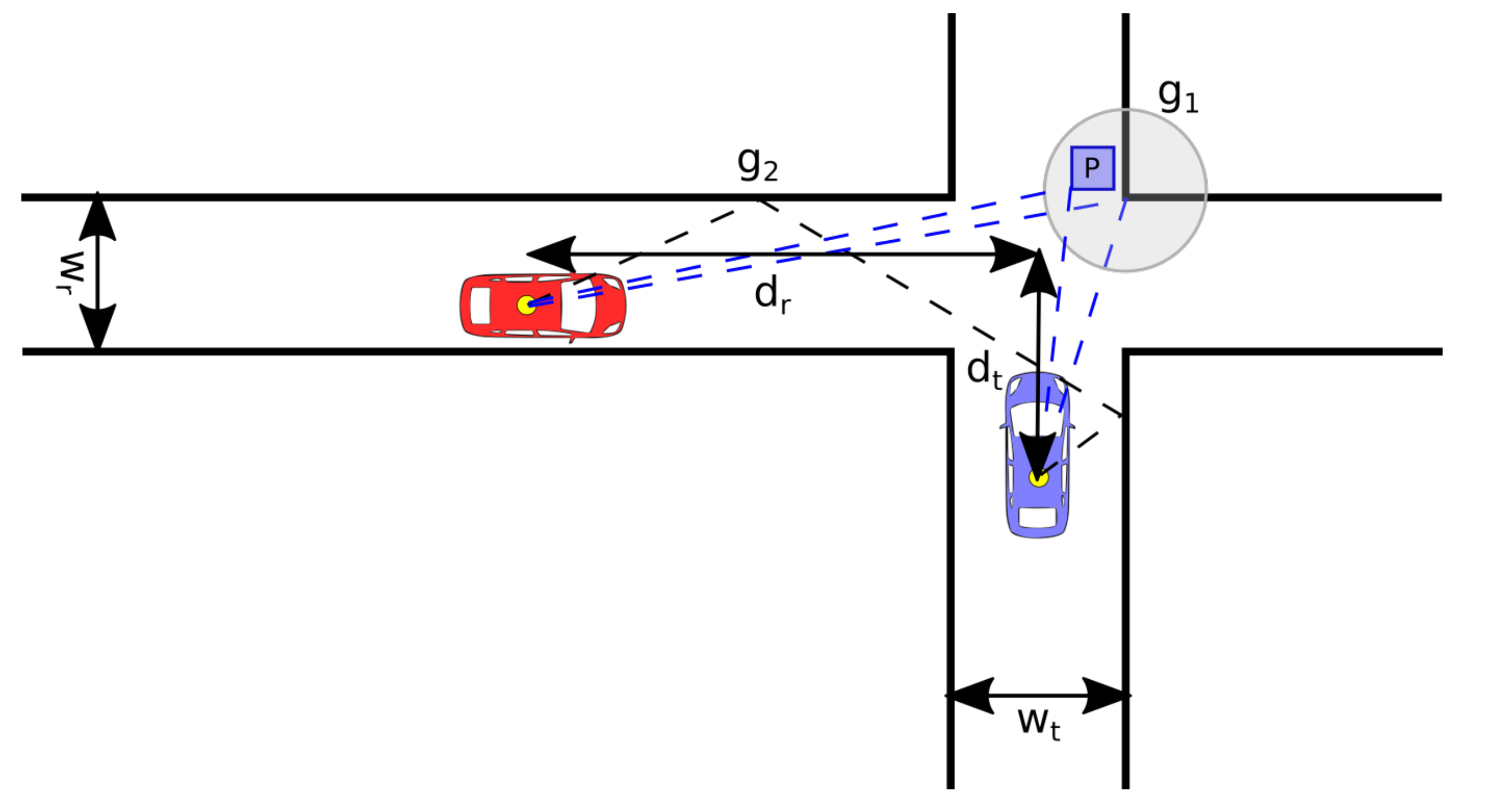
As mentioned previously, a channel model for urban V2V communications presented in [
31] was used for our observations. This channel model had a number of different parameters that related to the shape of the intersection and were used in Equation (
1). Note that the simulation scenario presented in
Figure 4 was similar to the X-junction presented in [
31]. Consequently, the following parameters were adopted in the work.
The value for the road width presented in
Table 1 was calculated by considering the value for the lane width of 4 m presented in [
34]. In this work, a road with two lanes and side walks was considered. The side walks had a width of 1 m, which resulted in a road width of 10 m.
As previously noted, this work considered the IEEE 802.11p standard [
15] for the physical layer of the vehicular communication link.
Table 2 summarizes the key parameters considered for the communication link.
The Rx sensitivity had a slightly higher value than the one presented in [
31], which was 23 dBm. This was because the value presented in [
31] considered a packet error rate of
, which was too high for safety applications in V2V communications. Finally, the algorithms had different hyper-parameters that had to be tuned for successful training, which are illustrated in
Table 3.
As mentioned, most of these hyper-parameters were tuned to increase the performance of the respective models. The tuning of the hyper-parameters was done via extensive computer simulations. The training of the model, as well as the performance comparison of the evaluated metrics are presented below.
4.2. Performance Evaluation
Taking into account the simulation scenario and the hyper-parameters presented, the following section focuses on presenting and analyzing the results obtained from the simulations.
It is worth mentioning that in [
18], MSCPSO was used to optimized the parameters of a
antenna array using PSO, and the results of the unknown positions were interpolated. However, the latter was evaluated using different restrictions compared to the ones in this manuscript. In particular, the authors in [
18] restricted the position of the vehicle in the road, but this restriction was discarded in our manuscript since for safety applications, every possible position is important. New results for MSCPSO were hence computed in this manuscript.
Initially, the results for the average power received in each of the four roads (P1, P2, P3, and P4) are exposed in
Table 4. These powers are expressed in dBm.
As can be seen, by using beamforming with any of the algorithms outperformed using an isotropic antenna. The values showed that the performance of the GA and MSCPSO was similar in the vertical roads (P3 and P4), but the GA outperformed MSCPSO significantly in the horizontal roads (P1 and P2). On the other hand, NEAT outperformed both algorithms considerably for all four roads. While the GA and MSCPSO use the interpolation of known positions to generate the output, NEAT trains a neural network that can output the values for any position. This has proven to make NEAT a flexible algorithm that can learn to generalize in various and complex learning tasks.
Another interesting result was the percentage (%) of the positions in which each of the algorithms outperformed the isotropic antenna in each of the four roads. The results were computed by sampling
positions in order to obtain representative outcomes and comparing the received power for the isotropic antenna and beamforming with each of the algorithms. The results presented in
Table 5 show that all of the presented algorithms using beamforming outperformed the isotropic antenna in most scenarios. Even though
Table 4 seems to indicate that the performances of the GA and MSCPSO were similar for two of the roads (P3 and P4),
Table 5 shows that the GA was superior compared to MSCPSO in all scenarios. This observation seems to indicate that even though, on average, the performance was similar for both algorithms, MSCPSO tended to have much more extreme values when compared to the GA.
Table 5 also shows that NEAT outperformed the isotropic antenna in all simulation scenarios. This, once again, was explained by the ability of NEAT to learn general solutions and not relying on the interpolation of known positions.
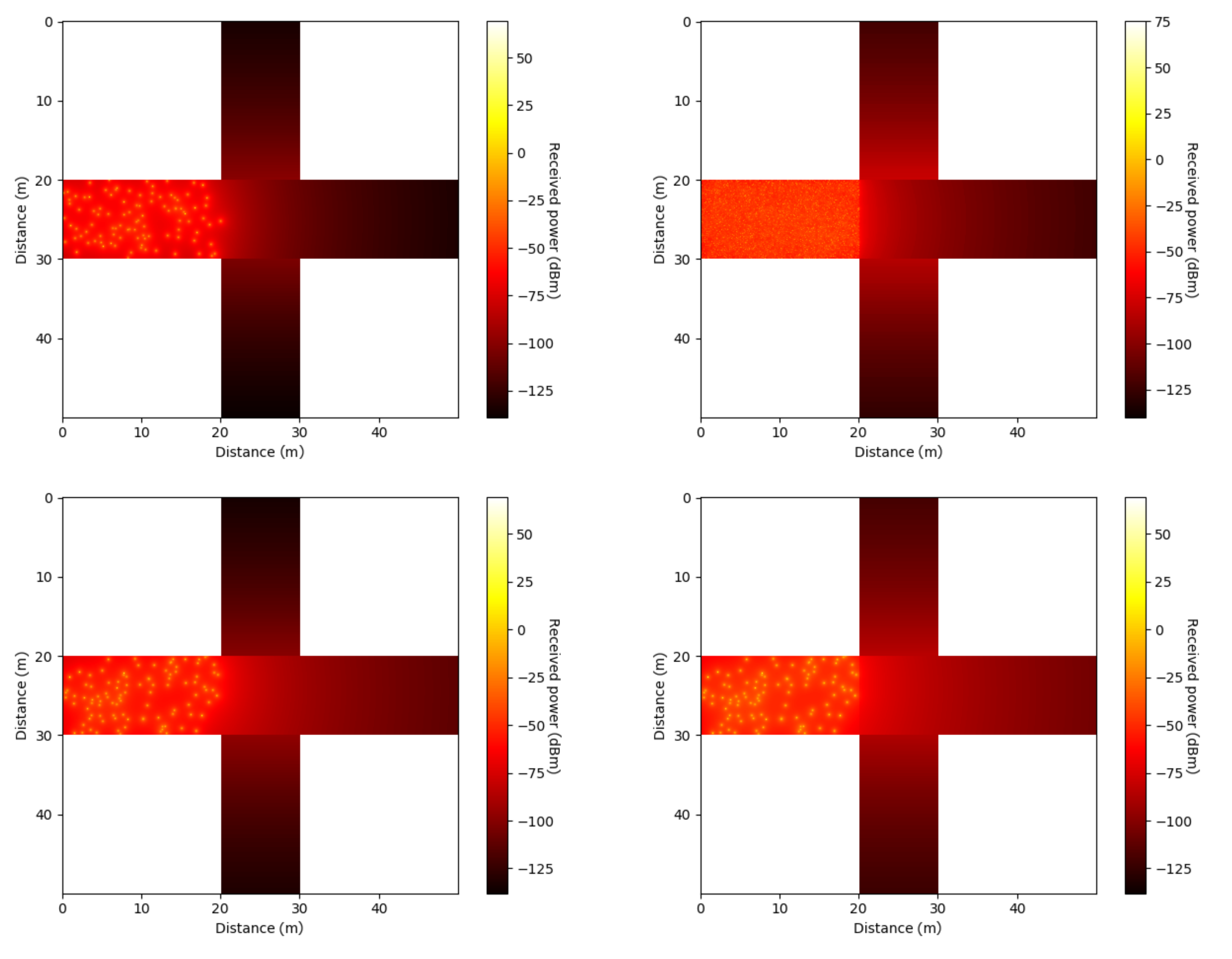
To expand our results,
Figure 5 shows the heat maps of the received power expressed in dBm for the isotropic antenna (top left) and beamforming with MSCPSO (top right), the GA (bottom left), and NEAT (bottom right). The heat-maps visually demonstrate that NEAT had the highest average power reaching the roads, which was reflected in a brighter color in its respective heat map, while the isotropic antenna had the lowest power. The isotropic antenna especially seemed to struggle at the road perpendicular to the car position, which was expected since there was no LOS component and the power was equally distributed in all directions. In comparison with the isometric antenna, both the GA and NEAT improved the power that reached this road by learning to generate beam shapes that focused the power in this specific direction. Meanwhile, MSCPSO depicted significant improvements over the isotropic antenna; however, its results were worse than the GA and NEAT, which was reflected in a darker shade in all four roads overall.
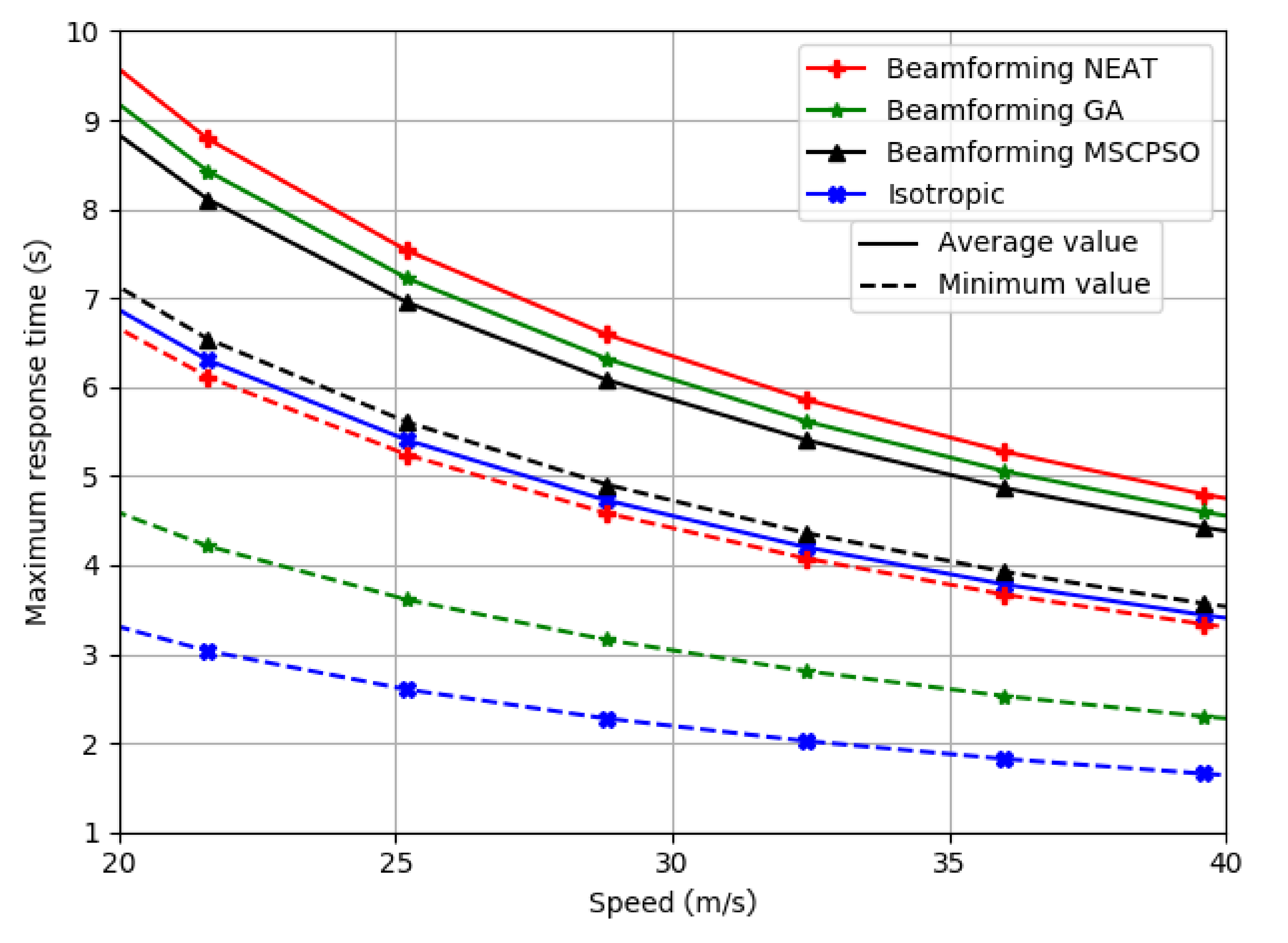
As mentioned, the main focus of the work was for safety applications. Because of this, one very important result was the amount of time between a vehicle receiving a packet and a possible collision. This was measured by generating
positions for the car transmitting the packet, by calculating the maximum distance from the intersection where a car moving perpendicular to the transmitting car would receive the packet, and by dividing this distance by the velocity of the car was moving. This relationship is denoted as maximum response time.
Figure 6 shows the curves obtained by the procedure that was previously described.
In
Figure 6, solid lines represent the mean for the maximum response time calculated for all the positions. The dotted lines represent the value for the worst case scenario. Curves and the respective minimum values for the isotropic antenna and beamforming antenna array optimized with NEAT, the GA, and MSCPSO are presented. It can be seen in
Figure 6 that the average maximum response time was largest for NEAT, followed by GA, MSCPSO, and finally, by the isotropic antenna. This shows that, on average, the performance of NEAT was the best, whilst the result for the isotropic antenna was the worst. This is coherent with the results in
Table 4 and
Table 5, where a similar trend can be appreciated.
It is interesting to note that even though the average value was greater for the GA than for MSCPSO, the GA had a much larger standard deviation, which resulted in a lower minimum value than MSCPSO. It is important to take this into consideration, since for safety applications, this type of border scenario may result in an accident, which was exactly what the work was looking to tackle.
MSCPSO had the highest minimum value for the maximum response time, followed closely by NEAT. This was because MSCPSO had by far the lowest standard deviation for the response time in every position. This means that the algorithm managed to reach long distances at any position in the road, which is important in safety applications. However, NEAT achieved similar minimum values with a slightly larger average value, which indicates that NEAT performed better in most scenarios. Furthermore, both beamforming with NEAT and MSCPSO achieved a minimum performance similar to the average performance of the isotropic antenna. This shows that, even in the worse possible scenario, both algorithms performed similarly to an isotropic antenna on average.
The results show that NEAT and MSCPSO have the best performance for road safety applications, whilst GA and isotropic antenna have much worse performance due to their larger standard deviation and lower average value in the case of isotropic antenna.

 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}