
Role of Deep Learning in Loop Closure Detection for Visual and Lidar SLAM: A Survey


Intelligent Robots Laboratory, Department of Control and Robot Engineering, Chungbuk National University, Cheongju-si 28644, Korea
*
Author to whom correspondence should be addressed.
Sensors 2021, 21(4), 1243; https://doi.org/10.3390/s21041243
Submission received: 3 December 2020
/
Revised: 27 January 2021
/
Accepted: 4 February 2021
/
Published: 10 February 2021
(This article belongs to the Special Issue Deep Learning Techniques for the Mapping and Localization of Mobile Robotics)
Abstract
:Loop closure detection is of vital importance in the process of simultaneous localization and mapping (SLAM), as it helps to reduce the cumulative error of the robot’s estimated pose and generate a consistent global map. Many variations of this problem have been considered in the past and the existing methods differ in the acquisition approach of query and reference views, the choice of scene representation, and associated matching strategy. Contributions of this survey are many-fold. It provides a thorough study of existing literature on loop closure detection algorithms for visual and Lidar SLAM and discusses their insight along with their limitations. It presents a taxonomy of state-of-the-art deep learning-based loop detection algorithms with detailed comparison metrics. Also, the major challenges of conventional approaches are identified. Based on those challenges, deep learning-based methods were reviewed where the identified challenges are tackled focusing on the methods providing long-term autonomy in various conditions such as changing weather, light, seasons, viewpoint, and occlusion due to the presence of mobile objects. Furthermore, open challenges and future directions were also discussed.
1. Introduction
Over the past few decades, simultaneous localization and mapping (SLAM) has been one of the most actively studied problems in autonomous robotic systems. Its main function is to enable the robot to navigate autonomously in an unknown environment by generating the map and accurately localize itself in the map. During localization, the robot must correctly recognize the previously visited places known as true loops. This recognition is done by one of the components of SLAM, known as loop closure detection. A true-loop closure detection helps the SLAM system to relocalize and enhances the mapping accuracy by reducing the accumulated drift in the map due to robot motion [1]. However, the existing loop closure detection systems are not yet that efficient to accurately detect the true loops. The parameters affecting the detection of true loops are changing illumination, environmental conditions, seasons, different viewpoints, occlusion in features due to the presence of mobile objects, and the presence of similar objects in different places.
Earlier studies have used point features for the detection of closed loops. Point features, such as scale invariant feature transform (SIFT) [2] and speedup robust features (SURF) [3], etc., used for visual loop closure detection are computationally expensive and are not suitable for real-time visual SLAM systems [4,5,6]. To enhance computational efficiency, many researchers have developed the bag-of-words (BoW)-based loop closure detection methods [7,8,9,10]. These methods store the visual information of the environment as a visual dictionary and generate the clusters where each cluster represents a “word”. The computational efficiency of BoW-based loop detection methods is further boosted with the inverted-index approach used for the data retrieval of previously visited places [10]. Though the BoW approach provides a fast solution to the handcrafted features-based loop closure detection, it requires a large amount of memory to store the visual words [11]. Most of the BoW-based loop detection algorithms generate fixed-sized vocabulary in an offline step and perform the loop closure detection in an online step to further reduce the computational cost [5,10]. Such methods perform well only if the loop closure detection is performed in the preknown environment and are not practical for unexplored environments. To address this issue, many researchers have created the BoW vocabulary in an online step to enable the system to work in real environments [10]. However, these methods are still inefficient as the memory requirement increases with increased vocabulary size. The recent studies using convolution neural network (CNN) features for loop closure detection have proven to be more robust against the above-mentioned challenges [12,13,14,15]. In addition, efforts have been made to reduce the memory usage of stored features through deep neural networks [16]. However, detecting truly closed loops is still an open problem.
Loop closure detection is of key importance to the SLAM system for the relocalization of a robot in a map. Several survey articles have extensively discussed the SLAM algorithms and their efforts to improve closed-loop detection. Hence, a thorough taxonomy is required to categorize the loop closure detection algorithms. In recent research [17], an extensive comparative analysis for feature-based visual SLAM algorithms was presented. The existing research is grouped into four categories based on visual features, i.e., low level, middle level, high level, and hybrid features, and highlighted their limitations. Another review for SLAM systems is provided where the scope is only limited to the vision-based SLAM algorithms [18]. Similarly, Sualeh et al. [19] developed a taxonomy of SLAM algorithms proposed in the last decade and discussed the impact of deep learning to overcome the challenges of SLAM. The loop closure detection was not thoroughly highlighted. A detailed survey of deep learning-based localization and mapping is provided in [20]. Other surveys and tutorials focusing on the individual flavors of SLAM include the probabilistic formulation of SLAM [21], pose-graph SLAM [22], visual odometry [23], and SLAM in dynamic environments [24]. We recommend these surveys and tutorials to our readers for a detailed understanding of SLAM.
In this survey, state-of-the-art loop closure detection algorithms developed for visual and Lidar SLAM in the past decade have been discussed and categorized into three major categories of vision-based, Lidar-based, and deep learning-based loop closure detection methods. To the best of our knowledge, this is the first survey article that provides an extensive study primarily focused on loop closure detection algorithms for SLAM. Moreover, open challenges are also identified.
The rest of the paper is organized as follows: In Section 2, the existing research of vision and Lidar-based loop detection using conventional approaches is discussed along with their limitations. Section 3 explains the state-of-the-art deep learning-based loop closure detection methods. Section 4 summarizes the challenges of conventional loop closure detection schemes and the existing research on deep learning-based loop detection to overcome these challenges. Finally, Section 5 concludes the survey.
2. Taxonomy of Loop Closure Detection
One of the essential parts of SLAM is the recognition of the previously mapped places and eliminating the incremental drift by recognizing the premapped environment. For loop closure detection, the estimation process cannot be trusted because of inconsistency. Thus, a dedicated algorithm is needed for the relocalization of the vehicle in a prebuilt map. In this section, the loop closure detection techniques are grouped into two major categories: vision-based and Lidar-based loop closure detection. Each category further groups the existing research on the basis of data acquisition and matching methods.
2.1. Vision-Based Loop Closure Detection
As imagery provides rich visual information, most of the methods make use of camera sensors for loop detection. Based on the matching schemes, we have grouped the vison-based loop detection methods as image-to-image matching [25], map-to-map matching [26], and image-to-map matching [27] schemes, as done in [28].
2.1.1. Image-to-Image Matching
Loop closure detection methods performing the image-to-image matching using the correspondence between the visual features are grouped in this category. These methods do not require the metric information of the features; instead, they apply topological information.
Bag-of-words [29] model has been widely used for loop closure detection. It first generates a vocabulary consisting of visual words where each word is a combination of some features extracted from a large training dataset. These features are clustered using the K-means clustering algorithm [30], as it is effective for unsupervised learning [31]. While searching for a similar match for the current image, the BoW method converts the image into a set of descriptors and for each descriptor. It searches for the closest cluster center to generate a BoW vector which is used for image matching with previously seen images. The vocabulary generation process is done as a preprocessing step either offline or online.
Methods with Offline Vocabulary
This category includes the loop detecting techniques using the bag-of-words approach where image features are discretized in the descriptor space and a unique vocabulary word is assigned to the group of similar visual or binary features. This vocabulary is generated in a hierarchical structure which enhances the matching performance.
In [8], a probabilistic framework is presented, FABMAP, for appearance-based place recognition and loop closing. FABMAP does not only detect the previously visited places on the map but also identifies the new places and augments the map. The algorithm applies the Chow–Liu tree [32] for building a generative model of visual BoW vocabulary with 11,000 words. These visual words consist of groups of visual features extracted from the images using a SURF detector/descriptor [33]. The system has been evaluated in an outdoor environment dataset. The complexity of FABMAP is linear to the number of places on the map. Although FABMAP achieved high performance, it was suitable for a few kilometers of trajectory. Also, the system performance degraded in the environments other than the training data. As FABMAP is using SURF features, it requires 400 milliseconds for only the feature extraction process.
To enhance the applicability of the FABMAP in large-scale environments, FABMAP 2.0 [34] was proposed for the 70 km and 1000 km trajectories dataset. It has also applied the inverted index with the BoW model for place recognition, generating a vocabulary of 100,000 words which improves the overall performance of the system in terms of loop detection and resource consumption. It has become the gold standard for loop detection, but the robustness decreases if the similar structure appears in the images for a long time [35].
Vocabulary generated using visual features such as SIFT and SURF provides high performance because of invariance to light, scale, and rotation. However, these features required a longer computation time [35,36,37,38]. This problem was addressed by the usage of binary features such as BRIEF [39], BRISK [40], and ORB [41]. As their information is compact so they are fast to compute and compare thus allowing much faster place matching. For the first time, binary features have been used in [9,42], Fast detector and BRIEF descriptor, for building a vocabulary of binary words. The system can perform the loop detection and verification at one order of magnitude less than the other similar techniques. As the BRIEF is not invariant to significant scale and rotation, these methods are good for loop detection with planar camera motion.
The BoW-based loop closure detection methods depend on the appearance features and their existence in the dictionary, ignoring the geometric information and relative position in the space, thereby resulting in false loops due to similar features appearing in different places [43]. Also, in the presence of dynamic objects, the similarity in the loop scene is reduced, thus causing the system to lose stability.
Methods with Online Vocabulary
The above-mentioned schemes build the vocabulary in offline steps. The systems trained on the prebuild vocabulary show high performance on the same dataset, but the performance degrades if the traversed places are inconsistent with the trained dataset. This problem is addressed by the generation of the vocabulary in an online step.
Offline vocabulary is not suitable for the dynamic robot environment. In [44] a loop closure detection method for a dynamic indoor and outdoor environment is developed by incrementally generating and updating the vocabulary, in an online step, through feature tracking among consecutive frames. The loop candidates are identified by a likelihood function that is based on inverse frequency of corresponding image features. After the likelihood evaluation, the vocabulary is updated based on new features extracted from the current image. Through extensive experiments, it is shown that the incremental vocabulary generation achieves a higher number of true positives in comparison to [37].
The BoW provides fast and easy loop detection. However, the performance of such systems is highly dependent on the appearance of a place. Thus, they suffer from a perceptual aliasing problem, i.e., occurrence of similar features in different places or drastic change in appearance of a place due to variation in environmental conditions. Kejriwal et al. [45] generated a bag-of-word-pairs dictionary using quantized SURF features by incorporating the spatial co-occurrence information of the image features to improve the recall rate and reported better performance than [44].
To deal with the occlusion due to the presence of dynamic objects, SIFT features have been used to enhance the loop detection accuracy for monocular SLAM [46]. The appearance changes in the dynamic environment due to moving objects have been detected through features projection from keyframes to current image and comparison among them. Tracking is performed through matching features. As a result, image comparisons and dynamic change in the environment are detected through gradual change in image portions. As SIFT features are computationally expensive, the system ensures the real-time performance through GPU acceleration and multithread programming. Similarly, in [47], SURF and BRIEF features have been extracted to perform the word training for loop detection in long-term autonomous driving. To improve the detection accuracy of BoW-based closed-loop detection in a dynamic environment, Xu et al. [48] performed the discrimination among feature points that belong to the static and dynamic objects. The algorithm first detects and removes the feature points belonging to the dynamic objects and then generates the BoW vocabulary using the static features.
2.1.2. Map-to-Map Matching
Methods performing map-to-map feature matching detect the loops by using the visual features and relative distance between features common to two submaps. In [26], loop closure detection is performed in monocular SLAM by using the geometric compatibility branch and bound (GCBB) algorithm which matches the submaps based on the similarity in visual features common in both submaps and their relative geometry. However, the system is not suitable for sparse maps [28]. The major limitation of such methods is that the maps are either too sparse to be distinctive or too complex such that they cannot be completely explored for high performance in real-time. For such methods, the exploration space can be reduced by using the position information of the map features as done in [49].
2.1.3. Image-to-Map Matching
This group includes the loop detection methods which use the correspondences between the visual features of the current camera image and the feature map. While in image-to-map matching, the aim is to determine the camera pose relative to the point features in the map and matching is based on appearance features along with their structure information.
In [25], a feature-tracking and loop closing method is proposed for monocular SLAM using appearance and structure information. At each time step, 16D SIFT features have been extracted from the current image representing the appearance information and matching with the map features using BoW model. The BoW appearance model helps to identify the part of the map that is similar to the current image by comparing image features with the map features and generating the loop closure candidates. The map is stored as a graph where each node stores the structure of landmarks. The structure for loop candidates is matched through landmark appearance models. The current pose relative to the map features is further determined by MLESAC [50] and the three-point pose algorithm [51].
William et al. [52] proposed a method for camera-pose estimation relative to the map for relocalization and loop closing through an image-to-map matching scheme. The feature map is built using the visual and metric information of landmarks. The appearance information of map features is learned using a randomized tree classifier [53], and correspondences between the current image and map are generated by landmark recognition. Once the landmarks are recognized in an image, the camera pose is determined using estimated metric information. For this purpose, a global metric map is divided into submaps. The relative positions of these submaps are determined by the mutual landmarks. The global map is represented by a graph where each node is a submap and edges between the nodes represent the transformation between submaps. Tracking is performed between the current and the previous submap, thus merging the maps. In the case of true overlap, the relative transformation between submaps is determined by the poses from their trajectories and an edge is added between the two consecutive submaps, thus representing a detected loop. Though it performs well in relocalization and loop closing, the randomized list classifier is memory inefficient.
Xiang et al. [54] proposed direct sparse odometry with loop closure detection (LDSO) as an extension of direct sparse odometry (DSO) [55] for monocular visual SLAM. The DSO ensures the robustness of the system in a featureless environment. To retain the repeatability of the feature points, LDSO extracts ORB features from keyframes. The loop closure candidates are selected using the BoW approach as used in [9]. Later, the RANSAC PnP [56] is applied for the verification of loop candidates. Raul et al. [57] addressed the relocalization and loop closure problem in keyframe-based SLAM by using the ORB feature. The proposed solution applies the image-to-map feature matching scheme and is robust to scale changes from 0.5 to 2.5 and 50 degrees of viewpoint changes. The loop can be detected and corrected at a 39 milliseconds frame rate in the database of 10,000 images. Due to scale and viewpoint invariance, the proposed method achieves a higher recall rate in comparison to [8,9,34].
2.2. Lidar-Based Loop Closure Detection
Vision-based loop closure detection for a long-term autonomous system is a challenging task due to large viewpoint and appearance changes. When such systems revisit a place, they are subject to extreme variations in seasons, weather, illumination, and a viewpoint along with the dynamic objects. These environmental changes make robust place recognition extremely difficult. These limitations can be handled by the LiDAR, up to some extent, as Lidar measurements are less prone to light and environmental changes in comparison to vision sensors, providing a 360-degree field of view. Unlike vision-based loop detection, research for Lidar-based solutions is rare. One of the reasons could be the high cost of LiDAR sensors which prevents the wider use. Another reason is that the LiDAR point clouds only contain the geometry information while images contain rich information; thus the place recognition is a challenging problem when using point clouds. The existing research on Lidar-based loop detection can be generally grouped into histograms and segmentation-based methods.
2.2.1. Histograms
Histogram extracts the feature values of points and encodes them as descriptors using global features [58,59,60] or selected keypoints [61,62,63,64]. One of the approaches used by these methods is the normal distribution transform (NDT) histogram [65], [66] which provides the compact representation of point cloud maps into a set of normal distributions. In [67], an NDT histogram is used to extract the structural information from Lidar scans by spatially dividing the scans into overlapping cells. NDT is computed for each cell and instances of certain classes of NDT in range intervals constitute the histograms. The authors have compared the histograms using the Euclidean distance metric [68]. It is shown that structural information provided by the histograms of NDT descriptors improves the accuracy of the loop detection algorithm. A similar approach is used in [69] for loop closure detection where scan matching is performed using the histograms of NDT descriptors.
NDT histogram-based methods are computationally expensive. To overcome the computational overhead, many researchers have put efforts into developing fast loop detection methods. In [58], the performance of the loop detection method presented in [67] has been improved and the computational cost is reduced by using the similarity measure histograms extracted from Lidar scans that are independent of NDT. Lin et al. [70] developed a fast loop closure detection system for Lidar odometry and mapping. It performs similarity matching among keyframes through 2D histograms. Another approach used for reducing the matching time is proposed in [62], where place recognition is performed by using 3D point cloud keypoints and 3D Gestalt descriptors [71,72]. The descriptors of current scan keypoints are matched with the point cloud map and a matching score is computed for each keypoints using nearest neighbor voting scheme. The true loop is determined by the obtained highest voting score after geometric verification.
The histogram-based methods can handle the two major issues: rotation invariance for large viewpoint changes and noise handling for spatial descriptors, as spatial descriptors are affected by the relative distance of an object from Lidar [61,73,74]. The major limitation of histogram-based methods is that they cannot preserve the information of the internal structure of a scene, thus making it less distinctive and causing false loop detections.
2.2.2. Segmentation
The loop detection methods using a point-cloud-segmentation approach are based on shapes or objects recognition [75,76,77,78,79,80]. In such methods, segmentation is performed as a preprocessing step because a priori knowledge about location of objects, that are to be segmented during robot navigation, is needed. The segment maps provide a better representation of a scene where static objects may become dynamic and are more related to the ways human’s environment perception. One of the advantages of such techniques is the ability to compress the point cloud map into a set of distinctive features which largely reduced the matching time and likelihood of obtaining false matches. Douillard et al. [81] provide a detailed discussion on several segmentation methods for Lidar point clouds including ground segmentation, cluster-all, base-of, base-of with ground method for dense data segmentation, and Gaussian process incremental sample consensus, mesh-based segmentation for sparse data. SegMatch [82] uses the cluster-all method for point cloud segmentation and extracts two types of features including eigenvalue-based and shape histograms. The features are segmented as trees, vehicles, buildings, etc., and matching is done by using a random forest algorithm [83]. It is observed that SegMatch requires real-time odometry for loop detection and does not perform well when using only the Lidar sensor. Also, the maps generated by SegMatch are less accurate. A similar segmentation approach is used in [84] to enhance the robustness of loop closure detection by reducing the noise and resolution effect. The point cloud descriptor encodes the topological information of segmented objects. However, the performance degrades if the segmentation information is not sufficient. In recent research [85], an optimized Lidar odometry and mapping algorithm is proposed in integration with SegMatch-based loop detection [82] to enhance the robustness and optimization of the global pose. The false matches are removed using ground plane constraints based on RANSAC [86]. Tomono et al. [87] applied a coarse-to-fine approach for loop detection among feature segments to reduce the processing time where lines, planes, and balls are used for coarse estimation instead of feature points.
Based on the literature reviewed in this section, the benefits and limitations of each method are summarized in Table 1.
3. Role of Deep Learning in Loop Closure Detection
In the past few years, deep learning has been introduced in visual and Lidar SLAM systems to overcome the challenges of truly-closed-loop detection [13,14,15,16,19,88,89,90]. The deep learning-based loop detection methods are known to be more robust to changing environmental conditions, seasonal changes, and occlusion due to the presence of dynamic objects [91]. This subsection presents the state-of-the-art deep learning-based loop closure detection methods using camera and Lidar sensors. The main characteristics of the algorithms are tabulated in Table 2. The table represents the reference of the algorithms followed by the year of publication, the sensors used for environment perception, the type of features used for environment representation, the neural network used by the algorithm, the type of environment for which the algorithm is developed, the loop closure challenges addressed by the algorithm, i.e., variation in weather, seasons, light, and viewpoint, computational efficiency, dynamic interference in the environment due to moving objects and the semantics used for environment classification.
3.1. Vision-Based Loop Closing
In deep learning-based visual loop closure detection algorithms, research efforts have been made to overcome the limitations of handcrafted feature-based methods. In a recent research [89], a multiscale deep-feature fusion-based solution is presented where abstract features are extracted from AlexNet [92] pre-trained on ImageNet [93] and fused with different receptive fields to generate fixed-length image representations that are invariant to illumination changes. A similar approach is used in [94] where features are extracted from fast and lightweight CNN to improve the loop detection accuracy and computation speed.
Many researchers have used semantics-based objects and scene classification for loop detection through deep learning [95,96]. Semantic segmentation classifies each image pixel according to the available object categories. All pixels, in an image, with same object class label are grouped together and represented with same color. Maps with semantic information enable the robots to have a high-level understanding of the environment.
Another approach used by the researchers for loop detection is autoencoders. The autoencoder compresses the input frame and regenerates it to the original image at the output end of the system [88,97]. Merril et al. [98] proposed an autoencoder-based unsupervised deep neural network for visual loop detection. The illumination invariance is achieved by generating HoG descriptor [99] from the autoencoder at output instead of the original image. The network is trained on the Places dataset [100] containing images from different places, primarily build for scene recognition. During the robot navigation, there may exist similar objects in different places which can greatly affect the performance of the algorithm when it is executed for a sequence of images of a path. The major limitation of this approach is that the autoencoder cannot show which keyframe in the database matches with the current image; instead, it can only detect if the current place is already visited or not. Gao et al. [88] have used the deep features from the intermediate layer of stacked denoising autoencoder (SDA) [101] and performed the comparison of the current image with previous keyframes. This method is also time-consuming as the current image is compared to all the previous images. Also, the perceptual aliasing problem is not addressed, which may result in false loops and incorrect map estimations.
3.2. Lidar-Based Loop Closing
To improve the matching time and detection accuracy of histogram-based loop detection methods, Zaganidis et al. [102] generated an NDT histogram-based local descriptor using semantic information obtained from PointNet++ [103]. Here, [104] implemented PointNetVLAD [105] which integrates PointNet [106] and NetVLAD [107] to generate a global descriptor from 3D point cloud. Similarly, LocNet [108] applies a semi-handcrafted deep network to generate a global representation of scan maps for place matching and loop detection.
In deep learning-augmented segment-based loop detection methods, the SegMap [109] produces segments of the scene incrementally as the robot navigates and passes those segments to a deep neural network to generate a signature per segment. A loop is detected by matching the segment signatures. SegMap aims to extract meaningful features for global retrieval while the semantic class types were limited to vehicles, buildings, and others. The performance of SegMap is further improved in [110].
Though segmentation-based loop detection methods are successful to enhance the performance in terms of processing time, they are highly dependent on segmentation information available in the environment. One of the solutions can be the formulation of a more generic and robust descriptor using segmentation information from multiview Lidar scans.
4. Challenges of Loop Closure Detection and Role of Deep Learning
Based on the existing literature and their limitations presented in Section 3, the major challenges of loop closure detection methods are identified. This section lists the major challenges and role of deep learning in SLAM systems to overcome those challenges.
4.1. Perceptual Aliasing
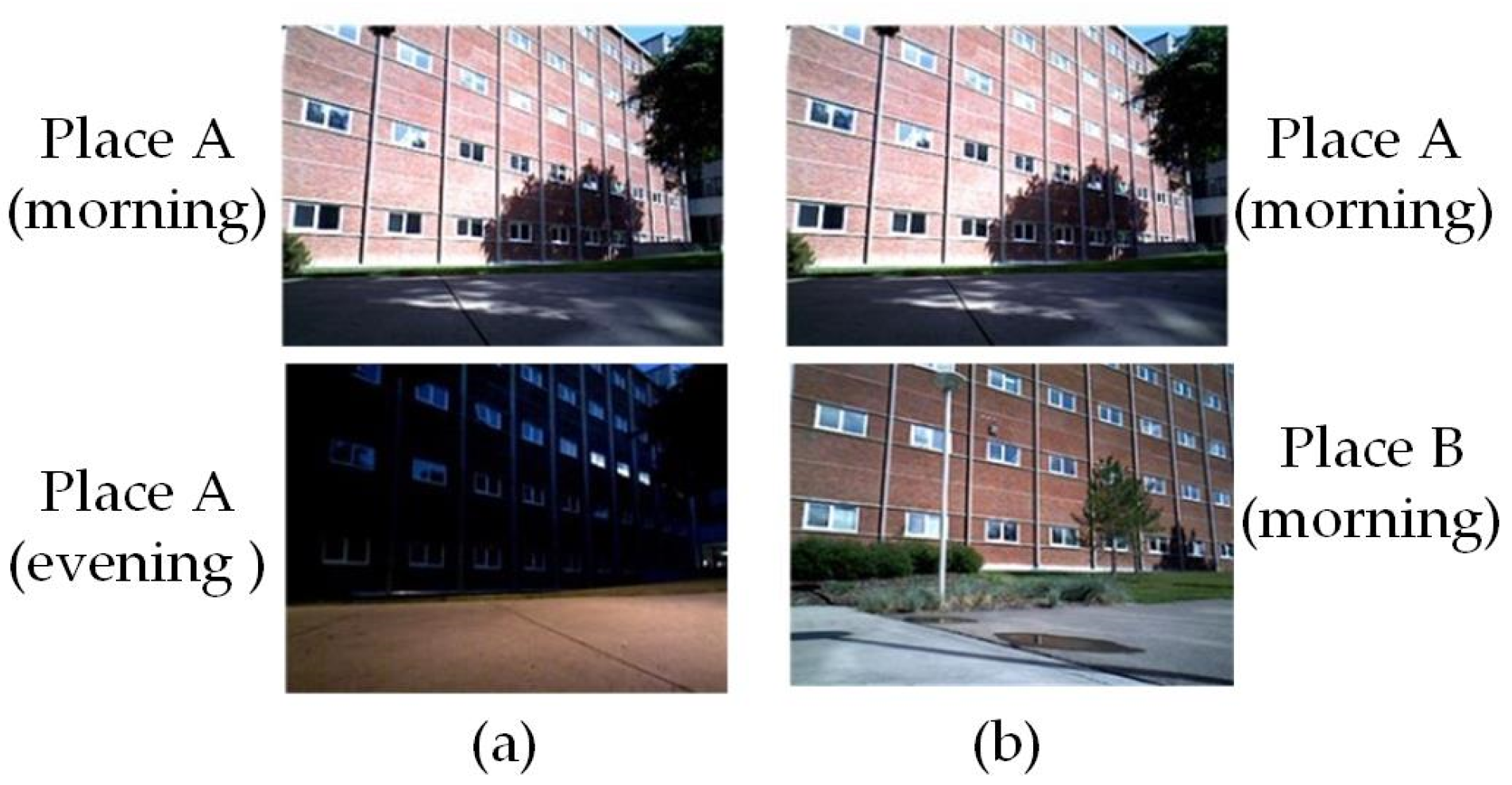
In an environment, the objects may have some visual, geometric, and topological features based on appearance, structure, and relative position of objects as depicted in Figure 1. Similar features may appear in different places such as in many buildings that have the same structure, color, and topological features, in corridors in a building with the same structure, or in doors that have the same geometry. This occurrence of similar features at different locations causes the loop detection algorithm to generate false loop correspondences and is termed as a “perceptual aliasing” problem. Perceptual aliasing is one of the main reasons for the failure of appearance-based loop detection methods. Many BoW-based methods generate false correspondences as they only consider similar visual features for true-loop detection [88]. This problem is well addressed in recent work by combining multiview information of a place, instead of single view, through deep neural networks [121]. Also, the temporal information is embedded in the descriptors by concatenating the descriptors of consecutive frames. Through experiments, it is shown that image descriptors generated from the sequence of images are more robust and distinctive in comparison to the descriptors generated from single image.
4.2. Variation in Environmental Conditions
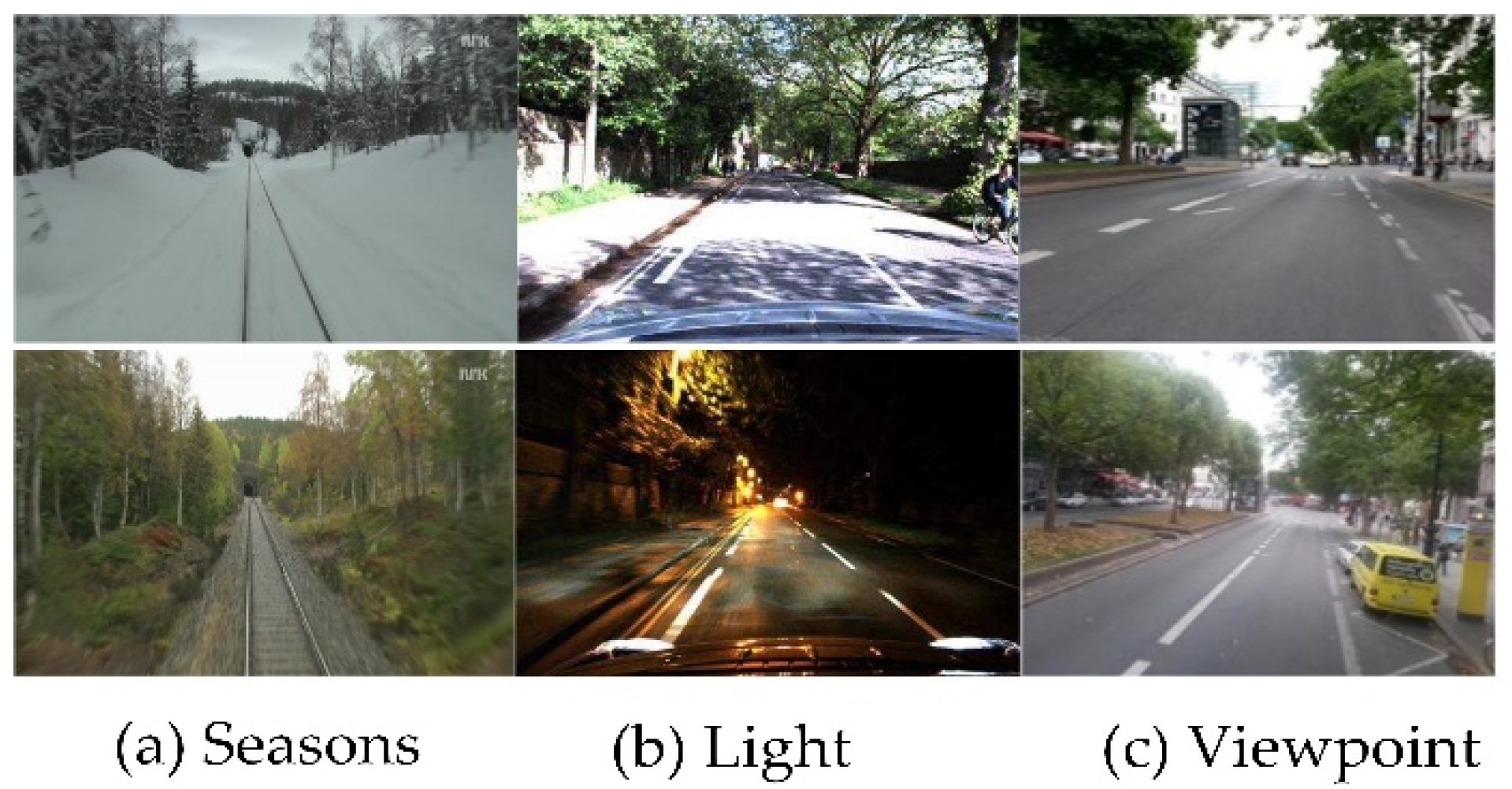
The loop closure is an open problem due to variation in illumination conditions [124], seasons [125], and viewpoints [126]. Figure 2 depicts the variation in seasons from summer to winter, light changes from day to night, and viewpoint variation due to lateral and angular changes.
For robot navigation in environments with viewpoint variations, the conventional approaches succeed up to some extent to achieve high performance in loop closure detection. In the case of light, weather, and seasonal variations, the features cannot be detected i.e., features detected during daytime are not detectable at night due to light effects. Seasonal changes affect the appearance of the environment drastically, e.g., leaves disappear in autumn, the ground is covered with snow in winter, etc. Similarly, weather conditions such as rain, clouds, and sunlight change the appearance of the environment. It is complicated to overcome these challenges using conventional methods as they are sensitive to such environmental conditions [88].
To overcome the challenges of changing environmental conditions, many researchers have proposed CNN-based loop detection methods that are robust to the variance of illumination and other conditions [16,88,98,122]. In [98], an unsupervised deep neural network is used to achieve illumination invariance in visual loop detection. Autoencoder-based loop detection methods using unsupervised deep neural networks achieved state-of-the-art performance for loop detection in variable environmental conditions [88,127]. However, these methods are not scale invariant. The viewpoint invariance problem up to 180-degree rotation change is addressed in [84] through an object-based point-cloud-segmentation approach.
BoW features are sensitive to illumination changes and cause loop detection failure in severe environmental condition changes. Chen et al. [89] extracted the abstract features from AlexNet and improved the illumination invariance through multiscale deep-feature fusion. For varying weather conditions, [118] performed camera-LiDAR-based loop closure detection using a deep neural network.
4.3. Dynamic Environment
The presence of moving objects in the environment is one of the major challenges for true loop detection. The mobile objects cause occlusion to the essential features in the scene [126,128], as shown in Figure 3; thus, the available features are not sufficient for the algorithm to detect the loop closure, leading to the closed-loop detection failure.
Many researchers have addressed this problem to improve the accuracy of the algorithm. The BoW-based loop closure detection methods perform well in a static environment. However, the detection performance decreases in the presence of dynamic objects due to reduced feature similarity in loop scenes. This issue can be better addressed using the semantic information of the environment as the semantic extraction is not affected if there are mobile objects or people [112].
Hu et al. [95] fused the object-level semantic information with the point features based on the BoW model [129] to enhance the image similarity in loop scenes and stabilize the system in a dynamic environment. Object-level semantic information is extracted using Faster R-CNN [130], pretrained on the COCO dataset [131]. It is shown that the point feature matching fused with semantics achieves better detection precision in comparison to only BoW-based loop detection. In [96], the object-based semantic information is embedded with the ORB features to improve the performance of the overall SLAM framework. The proposed framework extracts the semantic information of objects and assigns the class labels to the feature vectors which lie within the boundary boxes. Feature matching is only performed among the features with same class labels. Thus, avoiding the wrong matches and reducing the computation time for the loop closure detection thread. Memon et al. [16] combined the supervised and unsupervised deep learning methods to speed up the loop detection process. The true-loop detection is ensured by removing the features from dynamic objects that are either moving or temporarily static. Through deep learning, the proposed system performs eight times faster loop closure detection at low memory usage in comparison to traditional BoW-based methods.
4.4. Real-Time Loop Detection
In SLAM, the mapping and loop detection run in parallel threads. As the robot keeps on generating the environment map along the trajectory, the loop detection algorithm compares the current frame (in visual SLAM) with all previously seen images to detect the closed loop. As the map size increases, the similarity computation time for each frame increases which slows down the system and is not suitable for real-time applications [88]. Many approaches have been proposed in the past to overcome this challenge such as selecting random frames [132,133] or the fixed keyframes as used in ORB-SLAM2 [134] for comparison with the current frame, but still, the system will slow down in case of longer trajectories and also the probability of detecting true loop will decrease [88]. Thus, developing a real-time loop closure detection algorithm able to optimize the computation time with the variable map size is one of the major challenges. In the previous few years, deep learning-based loop closure detection methods have been developed to enhance the computational efficiency through different schemes such as reducing the descriptor size [121], reducing the deep network layers during deployment [94,98], matching features of same semantic class [96], generalizing scene representation with segmentation and matching segment feature descriptors instead of point features [109].
5. Conclusions and Future Research Directions
SLAM is an integral part of most autonomous robots. This article presents an extensive survey primarily focused on loop closure detection methods based on visual and Lidar features and groups them into two major categories. Based on the limitations of each approach, the major challenges of loop closure detection are identified. The survey also argues on how those challenges are addressed by the deep learning-based methods. From the reviewed literature, it is observed that loop detection methods based on deep neural networks proved to be robust to the challenges, but true-loop detection is still an open issue as both the camera and Lidar-based deep-learning loop closure detection approaches have some limitations.
The vision-based loop closure detection methods are sensitive to illumination variations and cannot work, but LiDAR can. Similarly, the Lidar-based methods fail in weather changes such as rain, while vision-based methods can perform comparatively well [135]. Thus, there is a need for research in visual–LiDAR fusion-based loop closure detection to take advantage of both modalities for achieving robustness against illumination and environmental changes [118]. To this end, the LiDAR scan analysis for feature detection and camera–LiDAR calibration are the primary problems to be addressed [118]. The semantics provides high-level understanding of the environment allowing the robot to percept the environment like the humans. One of the major limitations of semantics-based loop detection methods is the assumption that there are enough objects learned by the pretrained CNN model. In a real environment, this assumption may not be satisfied. Also, learning-based methods are computationally expensive, and the performance is dependent on the dataset used for training the network.
Author Contributions
Conceptualization, S.A.; Data curation, S.A.; Formal analysis, S.A.; Resources, S.A.; writing—original draft preparation, S.A.; Supervision, G.-W.K.; Review & edit, S.A. and G.-W.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research was financially supported in part by the Ministry of Trade, Industry and Energy (MOTIE) and Korea Institute for Advancement of Technology (KIAT) through the International Cooperative R&D program (Project No. P0004631), in part by the MSIT(Ministry of Science and ICT), Korea, under the Grand Information Technology Research Center support program (IITP-2020-0-01462) supervised by the IITP (Institute for Information & communications Technology Planning & Evaluation) and in part by Institute of Information & communications Technology Planning & Evaluation (IITP) grant funded by the Korea government (MSIT) (IITP-2020-0-00211, Development of 5G based swarm autonomous logistics transport technology for smart post office).
Institutional Review Board Statement
Not Applicable.
Informed Consent Statement
Not Applicable.
Data Availability Statement
Not Applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.D.; Leonard, J.J. Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-Perception Age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef] [Green Version]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-Up Robust Features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Li, S.; Zhang, T.; Gao, X.; Wang, D.; Xian, Y. Semi-direct monocular visual and visual-inertial SLAM with loop closure detection. Robot. Auton. Syst. 2019, 112, 201–210. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef] [Green Version]
- Zhu, H.; Wang, H.; Chen, W.; Wu, R. Depth estimation for deformable object using a multi-layer neural network. In Proceedings of the 2017 IEEE International Conference on Real-time Computing and Robotics (RCAR); Okinawa, Japan, 14–18 July 2017, Volume 2017, pp. 477–482.
- Stumm, E.; Mei, C.; Lacroix, S.; Nieto, J.; Hutter, M.; Siegwart, R. Robust Visual Place Recognition with Graph Kernels. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR); Las Vegas, NV, USA, 27–30 June 2016, Volume 2016, pp. 4535–4544.
- Cummins, M.; Newman, P. FAB-MAP: Probabilistic Localization and Mapping in the Space of Appearance. Int. J. Robot. Res. 2008, 27, 647–665. [Google Scholar] [CrossRef]
- Galvez-López, D.; Tardos, J.D. Bags of Binary Words for Fast Place Recognition in Image Sequences. IEEE Trans. Robot. 2012, 28, 1188–1197. [Google Scholar] [CrossRef]
- Garcia-Fidalgo, E.; Ortiz, A. IBoW-LCD: An Appearance-Based Loop-Closure Detection Approach Using Incremental Bags of Binary Words. IEEE Robot. Autom. Lett. 2018, 3, 3051–3057. [Google Scholar] [CrossRef] [Green Version]
- Chen, D.M.; Tsai, S.S.; Chandrasekhar, V.; Takacs, G.; Vedantham, R.; Grzeszczuk, R.; Girod, B. Inverted Index Compression for Scalable Image Matching. In Proceedings of the 2010 Data Compression Conference; Snowbird, UT, USA, 24–26 March 2010, p. 525.
- Naseer, T.; Ruhnke, M.; Stachniss, C.; Spinello, L.; Burgard, W. Robust visual SLAM across seasons. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); Hamburg, Germany, 28 September–2 October 2015, Volume 2015, pp. 2529–2535.
- Zhang, X.; Su, Y.; Zhu, X. Loop closure detection for visual SLAM systems using convolutional neural network. In Proceedings of the 23rd International Conference on Automation and Computing (ICAC); Huddersfield, UK, 7–8 September 2017, pp. 1–6.
- Shin, D.-W.; Ho, Y.-S. Loop Closure Detection in Simultaneous Localization and Mapping Using Learning Based Local Patch Descriptor. Electron. Imaging 2018, 2018, 284–291. [Google Scholar] [CrossRef] [Green Version]
- Qin, H.; Huang, M.; Cao, J.; Zhang, X. Loop closure detection in SLAM by combining visual CNN features and submaps. In Proceedings of the 4th International Conference on Control, Automation and Robotics, ICCAR; Auckland, New Zealand, 20–23 April 2018, pp. 426–430.
- Memon, A.R.; Wang, H.; Hussain, A. Loop closure detection using supervised and unsupervised deep neural networks for monocular SLAM systems. Rob. Auton. Syst. 2020, 126, 103470. [Google Scholar] [CrossRef]
- Azzam, R.; Taha, T.; Huang, S.; Zweiri, Y. Feature-based visual simultaneous localization and mapping: A survey. SN Appl. Sci. 2020, 2, 1–24. [Google Scholar] [CrossRef] [Green Version]
- Taketomi, T.; Uchiyama, H.; Ikeda, S. Visual SLAM algorithms: A survey from 2010 to 2016. IPSJ Trans. Comput. Vis. Appl. 2017, 9, 16. [Google Scholar] [CrossRef]
- Sualeh, M.; Kim, G.-W. Simultaneous Localization and Mapping in the Epoch of Semantics: A Survey. Int. J. Control. Autom. Syst. 2019, 17, 729–742. [Google Scholar] [CrossRef]
- Chen, C.; Wang, B.; Lu, C.X.; Trigoni, N.; Markham, A. A Survey on Deep Learning for Localization and Mapping: Towards the Age of Spatial Machine Intelligence. arXiv 2020, arXiv:2006.12567. [Google Scholar]
- Thrun, S. Probalistic Robotics. Kybernetes 2006, 35, 1299–1300. [Google Scholar] [CrossRef]
- Grisetti, G.; Kummerle, R.; Stachniss, C.; Burgard, W. A Tutorial on Graph-Based SLAM. IEEE Intell. Transp. Syst. Mag. 2010, 2, 31–43. [Google Scholar] [CrossRef]
- Scaramuzza, D.; Fraundorfer, F. Tutorial: Visual odometry. IEEE Robot. Autom. Mag. 2011, 18, 80–92. [Google Scholar] [CrossRef]
- Saputra, M.R.U.; Markham, A.; Trigoni, N. Visual SLAM and structure from motion in dynamic environments: A survey. ACM Comput. Surveys 2018, 51. [Google Scholar] [CrossRef]
- Eade, E.; Drummond, T. Unified Loop Closing and Recovery for Real Time Monocular SLAM. In Procedings of the British Machine Vision Conference 2008; BMVA Press: London, UK, 2008; Volume 13, p. 6. [Google Scholar]
- Burgard, W.; Brock, O.; Stachniss, C. Mapping Large Loops with a Single Hand-Held Camera. In Robotics: Science and Systems III; MIT Press: Cambridge, MA, USA, 2008; pp. 297–304. [Google Scholar]
- Williams, B.; Cummins, M.; Neira, J.; Newman, P.; Reid, I.; Tardos, J. An image-to-map loop closing method for monocular SLAM. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems; IEEE: Piscataway, NJ, USA, 2008; pp. 2053–2059. [Google Scholar]
- Williams, B.; Cummins, M.; Neira, J.; Newman, P.; Reid, I.; Tardós, J. A comparison of loop closing techniques in monocular SLAM. Robot. Auton. Syst. 2009, 57, 1188–1197. [Google Scholar] [CrossRef] [Green Version]
- Nister, D.; Stewenius, H. Scalable Recognition with a Vocabulary Tree. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06); IEEE: Piscataway, NJ, USA, 2006; Volume 2, pp. 2161–2168. [Google Scholar]
- Likas, A.; Vlassis, N.; Verbeek, J.J. The global k-means clustering algorithm. Pattern Recognit. 2003, 36, 451–461. [Google Scholar] [CrossRef] [Green Version]
- Silveira, G.; Malis, E.; Rives, P. An Efficient Direct Approach to Visual SLAM. IEEE Trans. Robot. 2008, 24, 969–979. [Google Scholar] [CrossRef]
- Chow, C.; Liu, C. Approximating discrete probability distributions with dependence trees. IEEE Trans. Inf. Theory 1968, 14, 462–467. [Google Scholar] [CrossRef] [Green Version]
- Bay, H.; Tuytelaars, T.; Van Gool, L. SURF: Speeded up robust features. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Elsevier: Amsterdam, The Netherlands, 2006; Volume 3951, pp. 404–417. [Google Scholar]
- Cummins, M.; Newman, P. Appearance-only SLAM at large scale with FAB-MAP 2.0. Int. J. Robot. Res. 2010, 30, 1100–1123. [Google Scholar] [CrossRef]
- Piniés, P.; Paz, L.M.; Gálvez-López, D.; Tardós, J.D. CI-Graph simultaneous localization and mapping for three-dimensional reconstruction of large and complex environments using a multicamera system. J. Field Robot. 2010, 27, 561–586. [Google Scholar] [CrossRef]
- Cadena, C.; Gálvez-López, D.; Ramos, F.; Tardós, J.D.; Neira, J. Robust place recognition with stereo cameras. In IEEE/RSJ 2010 International Conference on Intelligent Robots and Systems, IROS 2010—Conference Proceedings; IEEE: Piscataway, NJ, USA, 2010; pp. 5182–5189. [Google Scholar]
- Angeli, A.; Filliat, D.; Doncieux, S.; Meyer, J.A. Fast and incremental method for loop-closure detection using bags of visual words. IEEE Trans. Robot. 2008, 24, 1027–1037. [Google Scholar] [CrossRef] [Green Version]
- Paul, R.; Newman, P. FAB-MAP 3D: Topological mapping with spatial and visual appearance. In Proceedings—IEEE International Conference on Robotics and Automation; IEEE: Piscataway, NJ, USA, 2010; pp. 2649–2656. [Google Scholar]
- Calonder, M.; Lepetit, V.; Strecha, C.; Fua, P. BRIEF: Binary robust independent elementary features. In European Conference on Computer Vision; Elsevier: Amsterdam, The Netherlands, 2010; Volume 6314, pp. 778–792. [Google Scholar]
- Leutenegger, S.; Chli, M.; Siegwart, R.Y. BRISK: Binary Robust invariant scalable keypoints. In Proceedings of the IEEE International Conference on Computer Vision; Barcelona, Spain, 6–13 November 2011, IEEE: Piscataway, NJ, USA, 2011; pp. 2548–2555. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In 2011 International Conference on Computer Vision; IEEE: Piscataway, NJ, USA, 2011; pp. 2564–2571. [Google Scholar]
- Galvez-Lopez, D.; Tardos, J.D. Real-time loop detection with bags of binary words. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems; IEEE: Piscataway, NJ, USA, 2011; pp. 51–58. [Google Scholar]
- Gao, X.; Zhang, T. Loop closure detection for visual SLAM systems using deep neural networks. In Proceedings of the 2015 34th Chinese Control Conference (CCC); IEEE: Piscataway, NJ, USA, 2015; pp. 5851–5856. [Google Scholar]
- Khan, S.; Wollherr, D. IBuILD: Incremental bag of Binary words for appearance based loop closure detection. In Proceedings—IEEE International Conference on Robotics and Automation; IEEE: Piscataway, NJ, USA, 2015; pp. 5441–5447. [Google Scholar]
- Kejriwal, N.; Kumar, S.; Shibata, T. High performance loop closure detection using bag of word pairs. Robot. Auton. Syst. 2016, 77, 55–65. [Google Scholar] [CrossRef] [Green Version]
- Tan, W.; Liu, H.; Dong, Z.; Zhang, G.; Bao, H. Robust monocular SLAM in dynamic environments. In Proceedings of the 2013 IEEE International Symposium on Mixed and Augmented Reality (ISMAR); IEEE: Piscataway, NJ, USA, 2013; pp. 209–218. [Google Scholar]
- Johannsson, H.; Kaess, M.; Fallon, M.; Leonard, J.J. Temporally scalable visual SLAM using a reduced pose graph. In Proceedings—IEEE International Conference on Robotics and Automation; IEEE: Piscataway, NJ, USA, 2013; pp. 54–61. [Google Scholar]
- Xu, H.; Zhang, H.-X.; Yao, E.-L.; Song, H.-T. A Loop Closure Detection Algorithm in Dynamic Scene. DEStech Trans. Comput. Sci. Eng. 2018. [Google Scholar] [CrossRef]
- Li, H.; Nashashibi, F. Multi-vehicle cooperative localization using indirect vehicle-to-vehicle relative pose estimation. In 2012 IEEE International Conference on Vehicular Electronics and Safety, ICVES 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 267–272. [Google Scholar]
- Torr, P.H.S.; Zisserman, A. MLESAC: A new robust estimator with application to estimating image geometry. Comput. Vis. Image Underst. 2000, 78, 138–156. [Google Scholar] [CrossRef] [Green Version]
- Kneip, L.; Scaramuzza, D.; Siegwart, R. A novel parametrization of the perspective-three-point problem for a direct computation of absolute camera position and orientation. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition; IEEE: Piscataway, NJ, USA, 2011; pp. 2969–2976. [Google Scholar]
- Williams, B.; Klein, G.; Reid, I. Automatic Relocalization and Loop Closing for Real-Time Monocular SLAM. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 1699–1712. [Google Scholar] [CrossRef] [PubMed]
- Lepetit, V.; Fua, P. Keypoint recognition using randomized trees. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 1465–1479. [Google Scholar] [CrossRef] [Green Version]
- Gao, X.; Wang, R.; Demmel, N.; Cremers, D. LDSO: Direct Sparse Odometry with Loop Closure. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems; Madrid, Spain, 1 –5 October 2018, pp. 2198–2204.
- Engel, J.; Koltun, V.; Cremers, D. Direct Sparse Odometry. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 611–625. [Google Scholar] [CrossRef]
- Zhou, H.; Zhang, T.; Jagadeesan, J. Re-weighting and 1-Point RANSAC-Based PnP Solution to Handle Outliers. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 41, 3022–3033. [Google Scholar] [CrossRef] [PubMed]
- Mur-Artal, R.; Tardós, J.D. Fast relocalisation and loop closing in keyframe-based SLAM. In Proceedings—IEEE International Conference on Robotics and Automation; IEEE: Piscataway, NJ, USA, 2014; pp. 846–853. [Google Scholar]
- Rohling, T.; Mack, J.; Schulz, D. A fast histogram-based similarity measure for detecting loop closures in 3-D LIDAR data. In IEEE International Conference on Intelligent Robots and Systems; IEEE: Piscataway, NJ, USA, 2015; Volume 2015, pp. 736–741. [Google Scholar]
- Granstrom, K.; Schön, T.B.; Nieto, J.I.; Ramos, F.T. Learning to close loops from range data. Int. J. Robot. Res. 2011, 30, 1728–1754. [Google Scholar] [CrossRef]
- Zhou, Q.-Y.; Park, J.; Koltun, V. Fast Global Registration. In Mining Data for Financial Applications; Springer Nature: London, UK, 2016; Volume 9906, pp. 766–782. [Google Scholar]
- Muhammad, N.; Lacroix, S. Loop closure detection using small-sized signatures from 3D LIDAR data. In 9th IEEE International Symposium on Safety, Security, and Rescue Robotics, SSRR 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 333–338. [Google Scholar]
- Bosse, M.; Zlot, R. Place recognition using keypoint voting in large 3D lidar datasets. In Proceedings—IEEE International Conference on Robotics and Automation; IEEE: Piscataway, NJ, USA, 2013; pp. 2677–2684. [Google Scholar]
- Schmiedel, T.; Einhorn, E.; Gross, H.M. IRON: A fast interest point descriptor for robust NDT-map matching and its application to robot localization. In IEEE International Conference on Intelligent Robots and Systems; IEEE: Piscataway, NJ, USA, 2015; Volume 2015, pp. 3144–3151. [Google Scholar]
- Rusu, R.B.; Blodow, N.; Beetz, M. Fast Point Feature Histograms (FPFH) for 3D registration. In 2009 IEEE International Conference on Robotics and Automation; IEEE: Piscataway, NJ, USA, 2009; pp. 3212–3217. [Google Scholar]
- Biber, P. The Normal Distributions Transform: A New Approach to Laser Scan Matching. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems; Las Vegas, NV, USA, 27–31 October 2003.
- Magnusson, M.; Lilienthal, A.J.; Duckett, T. Scan registration for autonomous mining vehicles using 3D-NDT. J. Field Robot. 2007, 24, 803–827. [Google Scholar] [CrossRef] [Green Version]
- Magnusson, M.; Andreasson, H.; Nüchter, A.; Lilienthal, A.J. Automatic appearance-based loop detection from three-dimensional laser data using the normal distributions transform. J. Field Robot. 2009, 26, 892–914. [Google Scholar] [CrossRef] [Green Version]
- Weinberger, K.Q.; Blitzer, J.; Saul, L.K. Distance Metric Learning for Large Margin Nearest Neighbor Classification. Adv. Neural Inf. Process. Syst. 2005, 18, 1473–1480. [Google Scholar]
- Magnusson, M.; Andreasson, H.; Nuchter, A.; Lilienthal, A.J. Appearance-based loop detection from 3D laser data using the normal distributions transform. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation; IEEE: Piscataway, NJ, USA, 2009; pp. 23–28. [Google Scholar]
- Lin, J.; Zhang, F. A fast, complete, point cloud based loop closure for LiDAR odometry and mapping. arXiv 2019, arXiv:1909.11811. [Google Scholar]
- Bosse, M.; Zlot, R. Keypoint design and evaluation for place recognition in 2D lidar maps. Robot. Auton. Syst. 2009, 57, 1211–1224. [Google Scholar] [CrossRef]
- Walthelm, A. Enhancing global pose estimation with laser range. In International Conference on Intelligent Autonomous Systems; Elsevier: Amsterdam, The Netherlands, 2004. [Google Scholar]
- Himstedt, M.; Frost, J.; Hellbach, S.; Bohme, H.-J.; Maehle, E. Large scale place recognition in 2D LIDAR scans using Geometrical Landmark Relations. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems; IEEE: Piscataway, NJ, USA, 2014; pp. 5030–5035. [Google Scholar]
- Wohlkinger, W.; Vincze, M. Ensemble of shape functions for 3D object classification. In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics; IEEE: Piscataway, NJ, USA, 2011; pp. 2987–2992. [Google Scholar]
- Fernández-Moral, E.; Rives, P.; Arévalo, V.; González-Jiménez, J. Scene structure registration for localization and mapping. Robot. Auton. Syst. 2016, 75, 649–660. [Google Scholar] [CrossRef]
- Fernández-Moral, E.; Mayol-Cuevas, W.; Arevalo, V.; Gonzalez-Jimenez, J. Fast place recognition with plane-based maps. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation; IEEE: Piscataway, NJ, USA, 2013; pp. 2719–2724. [Google Scholar]
- Nieto, J.; Bailey, T.; Nebot, E. Scan-SLAM: Combining EKF-SLAM and scan correlation. In Springer Tracts in Advanced Robotics; Springer: Berlin, Germany, 2006; Volume 25, pp. 167–178. [Google Scholar]
- Douillard, B.; Underwood, J.; Vlaskine, V.; Quadros, A.; Singh, S. A pipeline for the segmentation and classification of 3D point clouds. In Springer Tracts in Advanced Robotics; Springer: Berlin, Germany, 2014; Volume 79, pp. 585–600. [Google Scholar]
- Douillard, B.; Quadros, A.; Morton, P.; Underwood, J.; De Deuge, M.; Hugosson, S.; Hallstrom, M.; Bailey, T. Scan segments matching for pairwise 3D alignment. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation; IEEE: Piscataway, NJ, USA, 2012; pp. 3033–3040. [Google Scholar]
- Ye, Q.; Shi, P.; Xu, K.; Gui, P.; Zhang, S. A Novel Loop Closure Detection Approach Using Simplified Structure for Low-Cost LiDAR. Sensors 2020, 20, 2299. [Google Scholar] [CrossRef] [Green Version]
- Douillard, B.; Underwood, J.; Kuntz, N.; Vlaskine, V.; Quadros, A.; Morton, P.; Frenkel, A. On the segmentation of 3D LIDAR point clouds. In Proceedings of the IEEE International Conference on Robotics and Automation; Shanghai, China, 9–13 May 2011.
- Dube, R.; Dugas, D.; Stumm, E.; Nieto, J.; Siegwart, R.; Cadena, C. SegMatch: Segment based place recognition in 3D point clouds. In Proceedings—IEEE International Conference on Robotics and Automation; IEEE: Piscataway, NJ, USA, 2017; pp. 5266–5272. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Fan, Y.; He, Y.; Tan, U.-X. Seed: A Segmentation-Based Egocentric 3D Point Cloud Descriptor for Loop Closure Detection. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); IEEE: Piscataway, NJ, USA, 2020; pp. 25–29. [Google Scholar]
- Liu, X.; Zhang, L.; Qin, S.; Tian, D.; Ouyang, S.; Chen, C. Optimized LOAM Using Ground Plane Constraints and SegMatch-Based Loop Detection. Sensors 2019, 19, 5419. [Google Scholar] [CrossRef] [PubMed]
- Schnabel, R.; Wahl, R.; Klein, R. Efficient RANSAC for Point-Cloud Shape Detection. Comput. Graph. Forum 2007, 26, 214–226. [Google Scholar] [CrossRef]
- Tomono, M. Loop detection for 3D LiDAR SLAM using segment-group matching. Adv. Robot. 2020, 34, 1530–1544. [Google Scholar] [CrossRef]
- Gao, X.; Zhang, T. Unsupervised learning to detect loops using deep neural networks for visual SLAM system. Auton. Robots 2017, 41, 1–18. [Google Scholar] [CrossRef]
- Chen, B.; Yuan, D.; Liu, C.; Wu, Q. Loop Closure Detection Based on Multi-Scale Deep Feature Fusion. Appl. Sci. 2019, 9, 1120. [Google Scholar] [CrossRef] [Green Version]
- Cascianelli, S.; Costante, G.; Bellocchio, E.; Valigi, P.; Fravolini, M.L.; Ciarfuglia, T.A. Robust visual semi-semantic loop closure detection by a covisibility graph and CNN features. Robot. Auton. Syst. 2017, 92, 53–65. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. In Proceedings of the 30th IEEE Conference on Computer Vision and Pattern Recognition; Honolulu, HI, USA, 21–26 July 2017, pp. 6517–6525.
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Li, F.F. Imagenet: A Large-Scale Hierarchical Image Database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition; Miami, FL, USA, 20–25 June 2009, pp. 248–255.
- He, Y.; Chen, J.; Zeng, B. A fast loop closure detection method based on lightweight convolutional neural network. Comput. Eng. 2018, 44, 182–187. [Google Scholar]
- Hu, M.; Li, S.; Wu, J.; Guo, J.; Li, H.; Kang, X. Loop closure detection for visual SLAM fusing semantic information. In Chinese Control Conference, CCC; IEEE: Piscataway, NJ, USA, 2019; Volume 2019, pp. 4136–4141. [Google Scholar]
- Wang, Y.; Zell, A. Improving Feature-based Visual SLAM by Semantics. In Proceedings of the 2018 IEEE International Conference on Image Processing, Applications and Systems (IPAS); Sophia Antipolis, France, 12–14 December 2018, IEEE: Piscataway, NJ, USA, 2018; pp. 7–12. [Google Scholar]
- Liao, Y.; Wang, Y.; Liu, Y. Graph Regularized Auto-Encoders for Image Representation. IEEE Trans. Image Process. 2017, 26, 2839–2852. [Google Scholar] [CrossRef]
- Merrill, N.; Huang, G. Lightweight Unsupervised Deep Loop Closure. In Robotics: Science and Systems; Springer: Berlin, Germany, 2018. [Google Scholar]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, CVPR; San Diego, CA, USA, 20–25 June 2005.
- Zhou, B.; Lapedriza, A.; Khosla, A.; Oliva, A.; Torralba, A. Places: A 10 Million Image Database for Scene Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 1452–1464. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ca, P.V.; Edu, L.T.; Lajoie, I.; Ca, Y.B.; Ca, P.-A.M. Stacked Denoising Autoencoders: Learning Useful Representations in a Deep Network with a Local Denoising Criterion Pascal Vincent Hugo Larochelle Yoshua Bengio Pierre-Antoine Manzagol. J. Mach. Learn. Res. 2010, 11, 3371–3408. [Google Scholar]
- Zaganidis, A.; Zerntev, A.; Duckett, T.; Cielniak, G. Semantically Assisted Loop Closure in SLAM Using NDT Histograms. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); IEEE: Piscataway, NJ, USA, 2019; pp. 4562–4568. [Google Scholar]
- Li, C.R.Q.; Hao, Y.; Leonidas, S.; Guibas, J. PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space. Adv. Neural Inform. Process. Syst. 2017, 30, 5099–5108. [Google Scholar]
- Yang, Y.; Song, S.; Toth, C. CNN-Based Place Recognition Technique for Lidar Slam. ISPRS—Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2020. [Google Scholar] [CrossRef]
- GitHub—Mikacuy/Pointnetvlad: PointNetVLAD: Deep Point Cloud Based Retrieval for Large-Scale Place Recognition, CVPR 2018. Available online: https://github.com/mikacuy/pointnetvlad (accessed on 27 November 2020).
- Qi, C.R.; Su, H.; Mo, K.; Guibas, L.J. PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition; Honolulu, HI, USA, 21–26 July 2017, IEEE: Piscataway, NJ, USA, 2017; pp. 652–660. [Google Scholar]
- Arandjelovi, R.; Gronat, P.; Sivic, J. NetVLAD: CNN architecture for weakly supervised place recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR); Las Vegas, NV, USA, 27–30 June 2016, IEEE: Piscataway, NJ, USA, 2016; pp. 5297–5307. [Google Scholar]
- Yin, H.; Tang, L.; Ding, X.; Wang, Y.; Xiong, R. LocNet: Global Localization in 3D Point Clouds for Mobile Vehicles. In IEEE Intelligent Vehicles Symposium, Proceedings; IEEE: Piscataway, NJ, USA, 2018; pp. 728–733. [Google Scholar]
- Dubé, R.; Cramariuc, A.; Dugas, D.; Nieto, J.; Siegwart, R.; Cadena, C. SegMap: 3D Segment Mapping using Data-Driven Descriptors. In Robotics: Science and Systems XIV; MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Dubé, R.; Cramariuc, A.; Dugas, D.; Sommer, H.; Dymczyk, M.; Nieto, J.; Siegwart, R.; Cadena, C. SegMap: Segment-based mapping and localization using data-driven descriptors. Int. J. Robot. Res. 2019, 39, 339–355. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR); IEEE: Piscataway, NJ, USA, 2016; pp. 779–788. [Google Scholar]
- Xia, Y.; Li, J.; Qi, L.; Fan, H. Loop closure detection for visual SLAM using PCANet features. In Proceedings of the International Joint Conference on Neural Networks; IEEE: Piscataway, NJ, USA, 2016; pp. 2274–2281. [Google Scholar]
- Chan, T.-H.; Jia, K.; Gao, S.; Lu, J.; Zeng, Z.; Ma, Y. PCANet: A Simple Deep Learning Baseline for Image Classification? IEEE Trans. Image Process. 2015, 24, 5017–5032. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Labe, T.; Milioto, A.; Rohling, T.; Vysotska, O.; Haag, A.; Behley, J.; Stachniss, C. OverlapNet: Loop Closing for LiDAR-based SLAM. In Proceedings of the Robotics: Science and Systems (RSS); Online Proceedings, 14–16 July 2020.
- Milioto, A.; Vizzo, I.; Behley, J.; Stachniss, C. RangeNet++: Fast and Accurate LiDAR Semantic Segmentation. In 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); IEEE: Piscataway, NJ, USA, 2019; pp. 4213–4220. [Google Scholar]
- Wang, S.; Lv, X.; Liu, X.; Ye, D. Compressed Holistic ConvNet Representations for Detecting Loop Closures in Dynamic Environments. IEEE Access 2020, 8, 60552–60574. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR); Las Vegas, NV, USA, 27–30 June 2016, IEEE: Piscataway, NJ, USA, 2016; pp. 770–778. [Google Scholar]
- Żywanowski, K.; Banaszczyk, A.; Nowicki, M. Comparison of camera-based and 3D LiDAR-based loop closures across weather conditions. arXiv 2020, arXiv:2009.03705. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. In Proceedings of the 3rd International Conference on Learning Representations, ICLR 2015; San Diego, CA, USA, 7–9 May 2015.
- Olid, D.; Fácil, J.M.; Civera, J. Single-View Place Recognition under Seasonal Changes. arXiv 2018, arXiv:1808.06516. [Google Scholar]
- Facil, J.M.; Olid, D.; Montesano, L.; Civera, J. Condition-Invariant Multi-View Place Recognition. arXiv 2019, arXiv:1902.09516. [Google Scholar]
- Liu, Y.; Xiang, R.; Zhang, Q.; Ren, Z.; Cheng, J. Loop closure detection based on improved hybrid deep learning architecture. In Proceedings—2019 IEEE International Conferences on Ubiquitous Computing and Communications and Data Science and Computational Intelligence and Smart Computing, Networking and Services, IUCC/DSCI/SmartCNS 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 312–317. [Google Scholar]
- Sunderhauf, N.; Shirazi, S.; Dayoub, F.; Upcroft, B.; Milford, M. On the performance of ConvNet features for place recognition. In IEEE International Conference on Intelligent Robots and Systems; IEEE: Piscataway, NJ, USA, 2015; pp. 4297–4304. [Google Scholar]
- Maddern, W.; Pascoe, G.; Linegar, C.; Newman, P. 1 year, 1000 km: The Oxford RobotCar dataset. Int. J. Robot. Res. 2016, 36, 3–15. [Google Scholar] [CrossRef]
- Nordlandsbanen: Minute by Minute, Season by Season. Available online: https://nrkbeta.no/2013/01/15/nordlandsbanen-minute-by-minute-season-by-season/ (accessed on 5 December 2020).
- Suenderhauf, N.; Shirazi, S.; Jacobson, A.; Dayoub, F.; Pepperell, E.; Upcroft, B.; Milford, M. Place recognition with ConvNet landmarks: Viewpoint-robust, condition-robust, training-free. In Proceedings of the Robotics: Science and Systems Conference XI; Rome, Italy, 13–15 July 2015.
- Hou, Y.; Zhang, H.; Zhou, S. Convolutional neural network-based image representation for visual loop closure detection. In 2015 IEEE International Conference on Information and Automation, ICIA 2015—In Conjunction with 2015 IEEE International Conference on Automation and Logistics; IEEE: Piscataway, NJ, USA, 2015; pp. 2238–2245. [Google Scholar]
- Computer Vision Group—Dataset Download. Available online: https://vision.in.tum.de/data/datasets/rgbd-dataset/download (accessed on 2 December 2020).
- Peng, X.; Wang, L.; Wang, X.; Qiao, Y. Bag of visual words and fusion methods for action recognition: Comprehensive study and good practice. Comput. Vis. Image Underst. 2016, 150, 109–125. [Google Scholar] [CrossRef] [Green Version]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. In Advances in Neural Information Processing Systems; Neural Information Processing Systems Foundation Inc.: San Diego, CA, USA, 2015; pp. 91–99. [Google Scholar]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft COCO: Common objects in context. In Computer Vision–ECCV 2014. ECCV 2014. Lecture Notes in Computer Science; Springer: Cham, Swizerland, 2014; pp. 740–755. [Google Scholar]
- Stückler, J.; Behnke, S. Multi-resolution surfel maps for efficient dense 3D modeling and tracking. J. Vis. Commun. Image Represent. 2014, 25, 137–147. [Google Scholar] [CrossRef]
- Endres, F.; Hess, J.; Sturm, J.; Cremers, D.; Burgard, W. 3-D Mapping With an RGB-D Camera. IEEE Trans. Robot. 2014, 30, 177–187. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Tardos, J.D. ORB-SLAM2: An Open-Source SLAM System for Monocular, Stereo, and RGB-D Cameras. IEEE Trans. Robot. 2017, 33, 1255–1262. [Google Scholar] [CrossRef] [Green Version]
- Debeunne, C.; Vivet, D. A Review of Visual-LiDAR Fusion based Simultaneous Localization and Mapping. Sensors 2020, 20, 2068. [Google Scholar] [CrossRef] [Green Version]
Figure 1.
(a) Same place with different appearance and (b) similar looking different places.

Figure 2.
Change in appearance of places due to variation in (a) seasons [125], (b) light [124], and (c) viewpoint [126].

Figure 3.
Occlusion in features of same place due to moving objects such as person [128] and vehicles [126].


{kind=link}
{kind=link}
{kind=link}
Table 1.
Summary of the benefits and limitations of camera and Lidar-based loop closure detection methods.
Table 1.
Summary of the benefits and limitations of camera and Lidar-based loop closure detection methods.
| Method | Benefits | Limitations | ||
|---|---|---|---|---|
| Vision-based | Image-to-Image | Offline Vocabulary |
|
|
| Online Vocabulary |
|
| ||
| Map-to-Map |
|
| ||
| Image-to-Map |
|
| ||
| Lidar-based | Histograms |
|
| |
| Segmentation |
|
| ||
Table 2.
State-of-the-art deep learning-based loop closure detection methods for visual and Lidar SLAM.
Table 2.
State-of-the-art deep learning-based loop closure detection methods for visual and Lidar SLAM.
| Ref. | Year | Sensor | Components | Deep Learning Algorithm | Env | Challenges | Seman-tics | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Weather | Seasons | Light | Viewpoint | Effi-ciency | Dynamic Env | |||||||
| [89] | 2019 | C | CNN feature | AlexNet |   | - | - | + | - | - | - | - |
| [95] | 2019 | C | SIFT, SURF, ORB | Faster R-CNN | | - | - | - | + | - | + | + |
| [96] | 2018 | C | ORB | Yolo [111] | | - | - | + | + | + | + | + |
| [98] | 2018 | C | HoG | Autoencoder | | + | + | + | + | - | + | - |
| [102] | 2019 | L | Semantic-NDT | PointNet++ [103] | | - | - | + | + | + | + | + |
| [108] | 2018 | L | Semi-handcrafted | Siamese | | - | - | + | + | + | + | - |
| [109] | 2018 | L | SegMap | CNN | | - | - | - | + | - | - | - |
| [110] | 2020 | L | SegMap | CNN | | - | - | - | + | + | - | |
| [112] | 2016 | C | SIFT, SURF, ORB | PCANet [113] | | - | - | + | + | - | - | - |
| [114] | 2020 | L | Semantic class | RangeNet++ [115] | | - | - | - | + | - | + | + |
| [116] | 2020 | C | CNN feature | ResNet18 [117] | | + | + | + | + | + | + | - |
| [118] | 2020 | C/L | CNN feature | VGG16 [119] | | + | - | + | - | - | + | - |
| [120] | 2018 | C | CNN feature | VGG16 | | + | + | + | + | - | - | - |
| [121] | 2019 | C | CNN Multiview descriptor | ResNet-50 [117] | | + | + | + | + | - | + | - |
| [122] | 2019 | C | Semantic feature | Hybrid [123] | | + | + | + | + | - | - | + |
L: LiDAR; C: Camera; ![Sensors 21 01243 i001]() : Indoor;
: Indoor; ![Sensors 21 01243 i002]() : Outdoor; +: Present; -: Absent.
: Outdoor; +: Present; -: Absent.
: Indoor; : Outdoor; +: Present; -: Absent.Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Arshad, S.; Kim, G.-W. Role of Deep Learning in Loop Closure Detection for Visual and Lidar SLAM: A Survey. Sensors 2021, 21, 1243. https://doi.org/10.3390/s21041243
AMA Style
Arshad S, Kim G-W. Role of Deep Learning in Loop Closure Detection for Visual and Lidar SLAM: A Survey. Sensors. 2021; 21(4):1243. https://doi.org/10.3390/s21041243
Chicago/Turabian StyleArshad, Saba, and Gon-Woo Kim. 2021. "Role of Deep Learning in Loop Closure Detection for Visual and Lidar SLAM: A Survey" Sensors 21, no. 4: 1243. https://doi.org/10.3390/s21041243
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.