Convolutional Neural Network and Motor Current Signature Analysis during the Transient State for Detection of Broken Rotor Bars in Induction Motors

 ,
,  , and
, and
Abstract
:1. Introduction
2. Theoretical Background
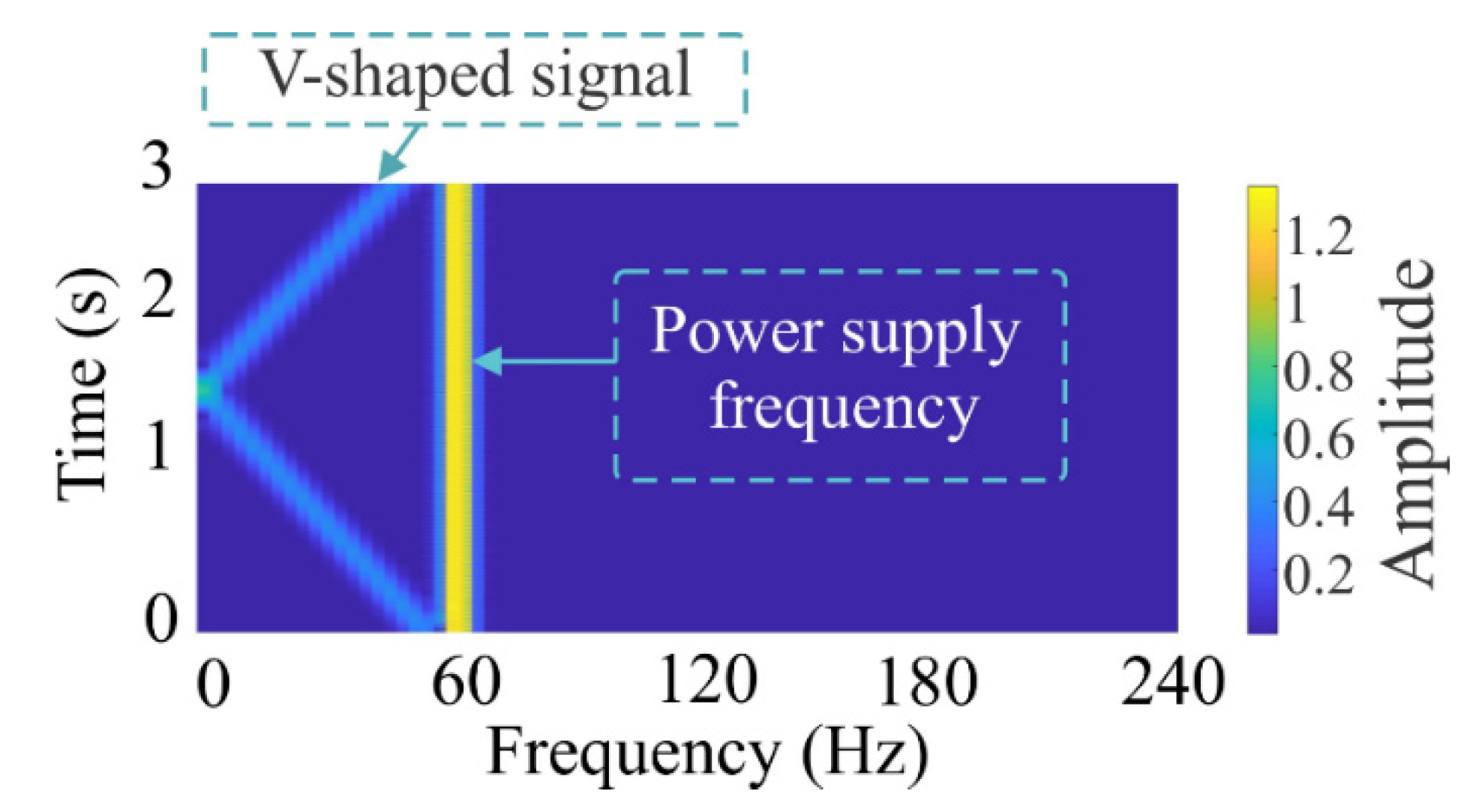
2.1. Motor Current Signature Analysis
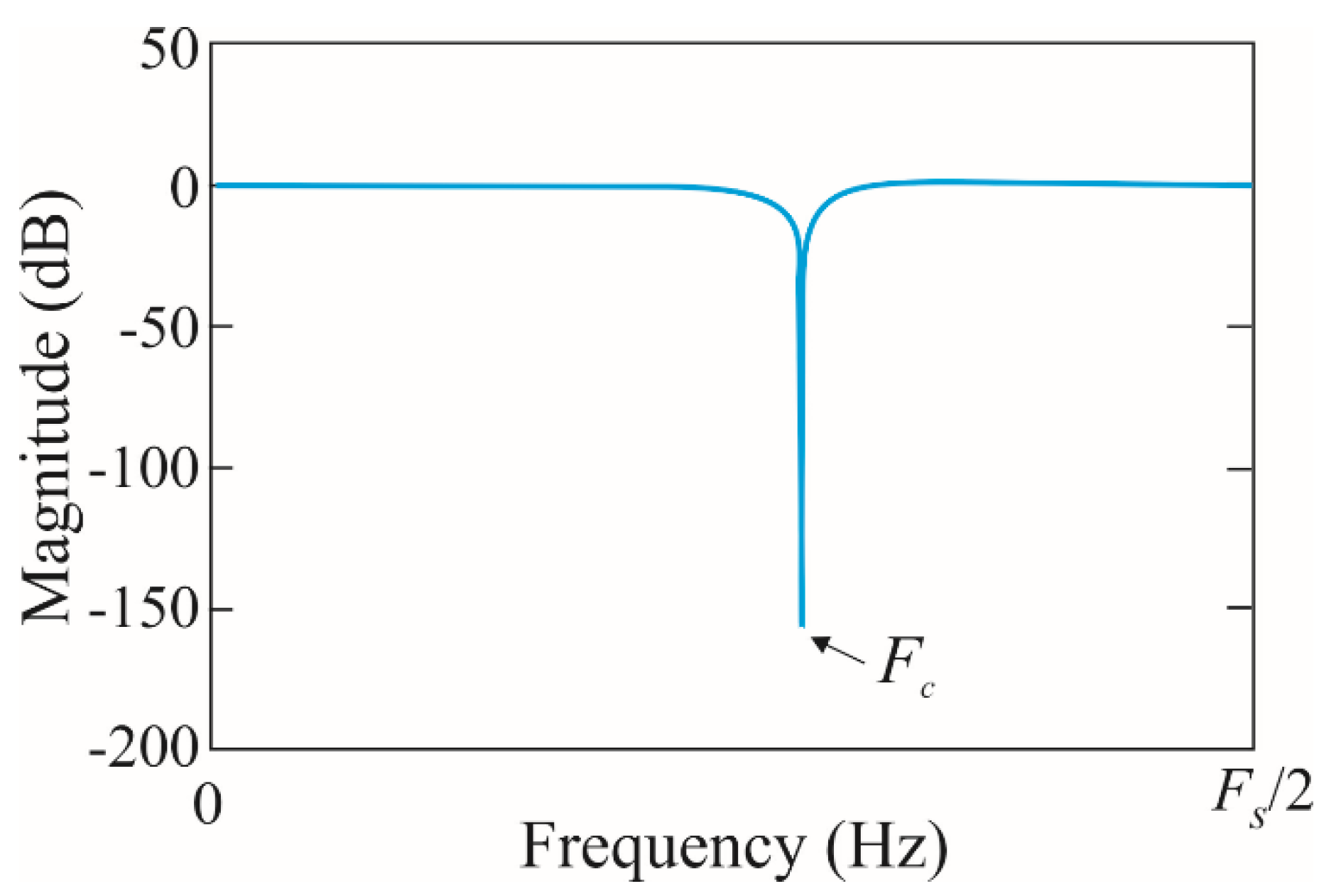
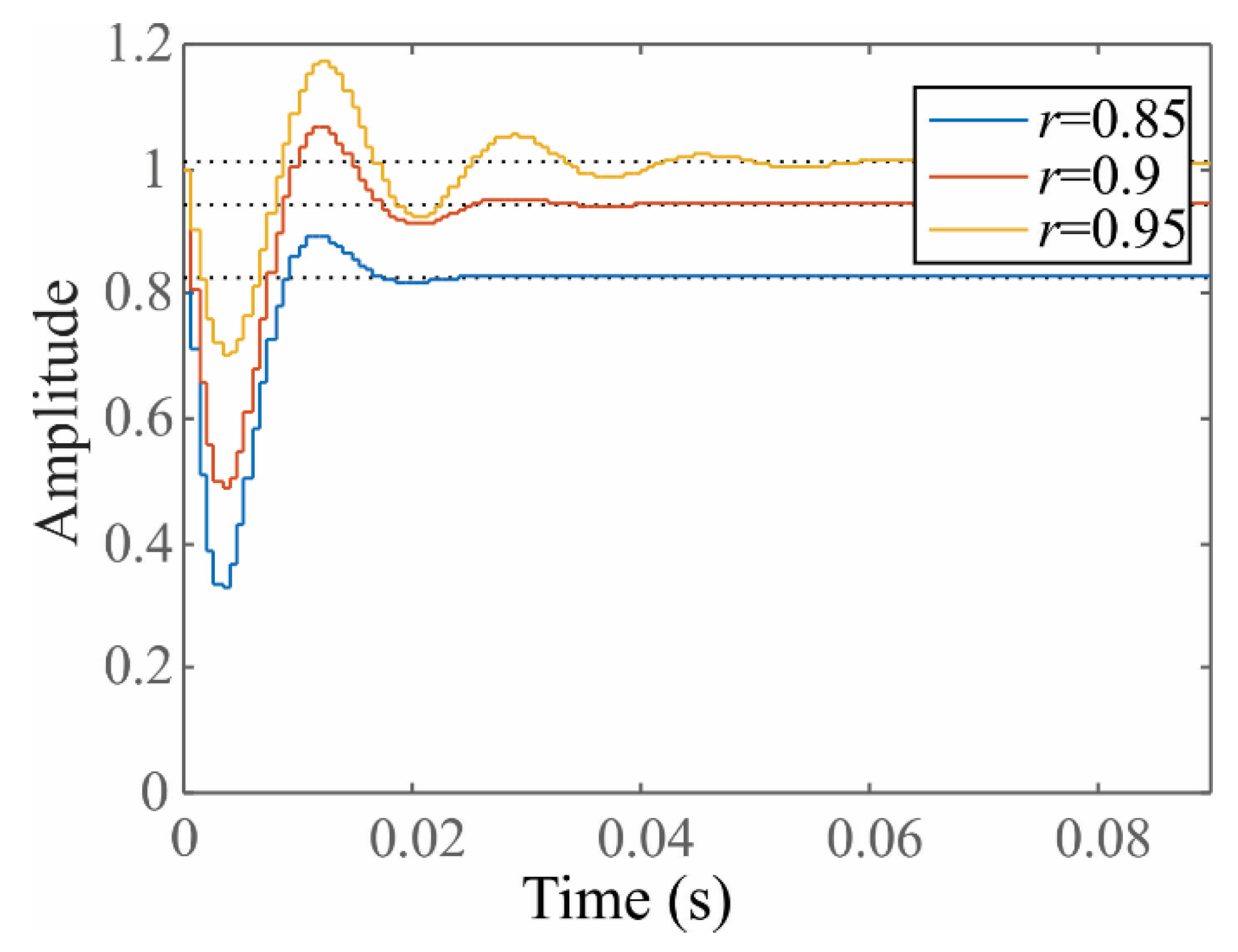
2.2. Infinite Impulse Response (IIR) Notch Filter
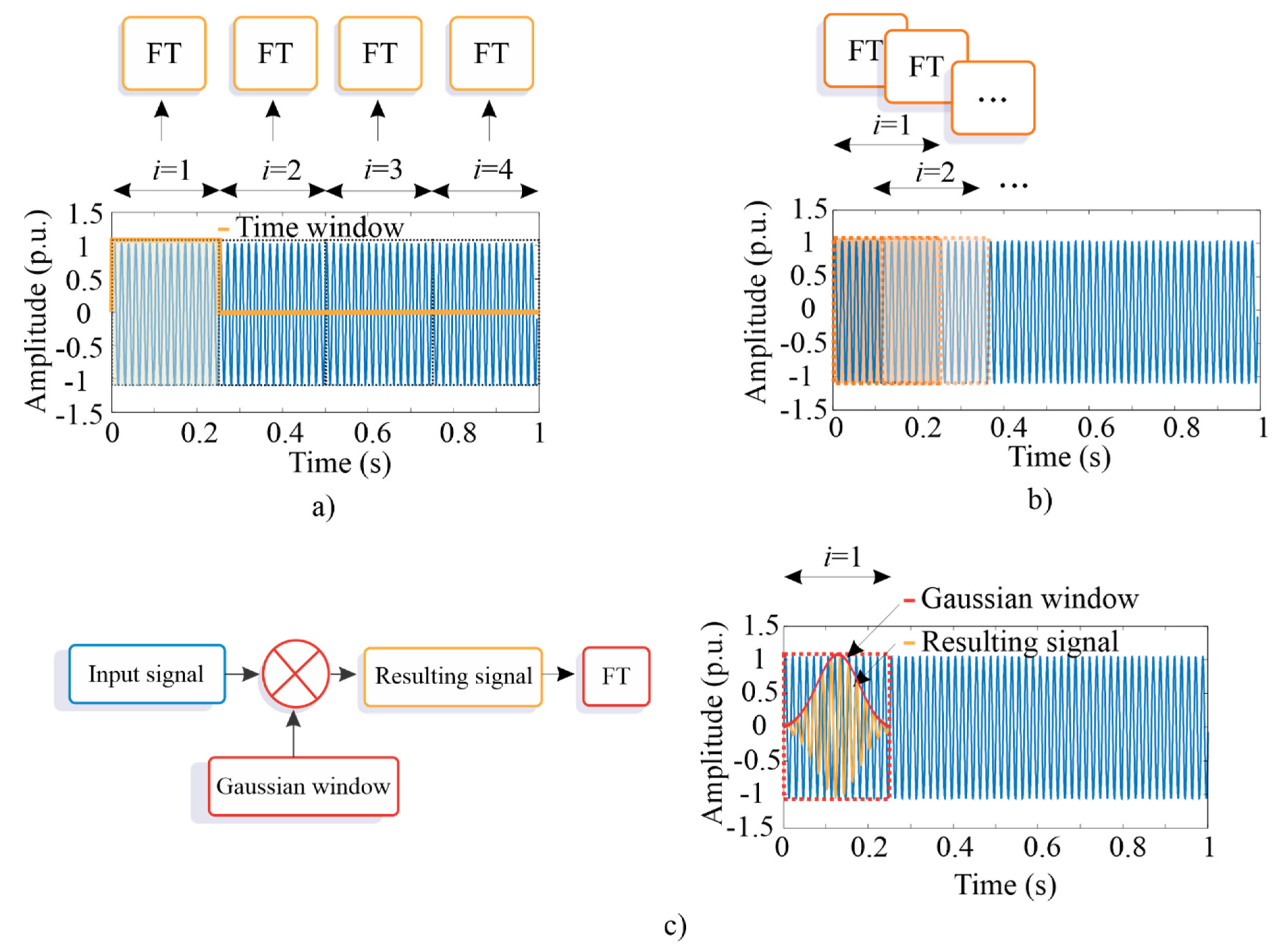
2.3. Fourier Transform
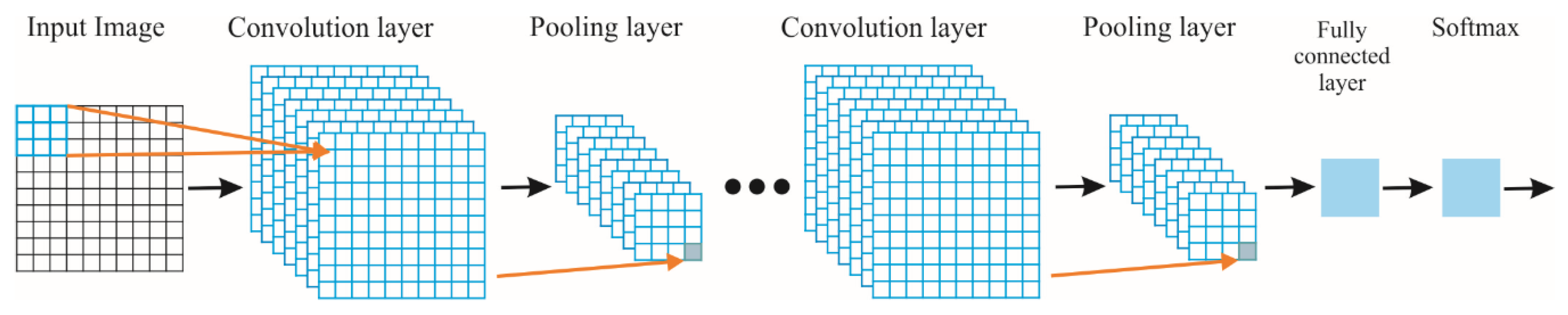
2.4. Convolutional Neural Network
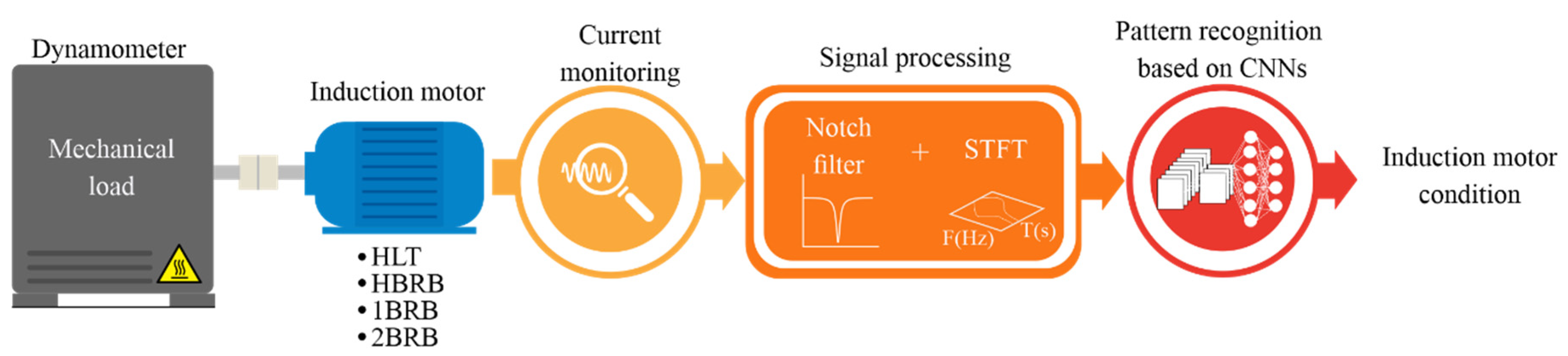
3. Proposed Methodology
4. Experimentation and Results
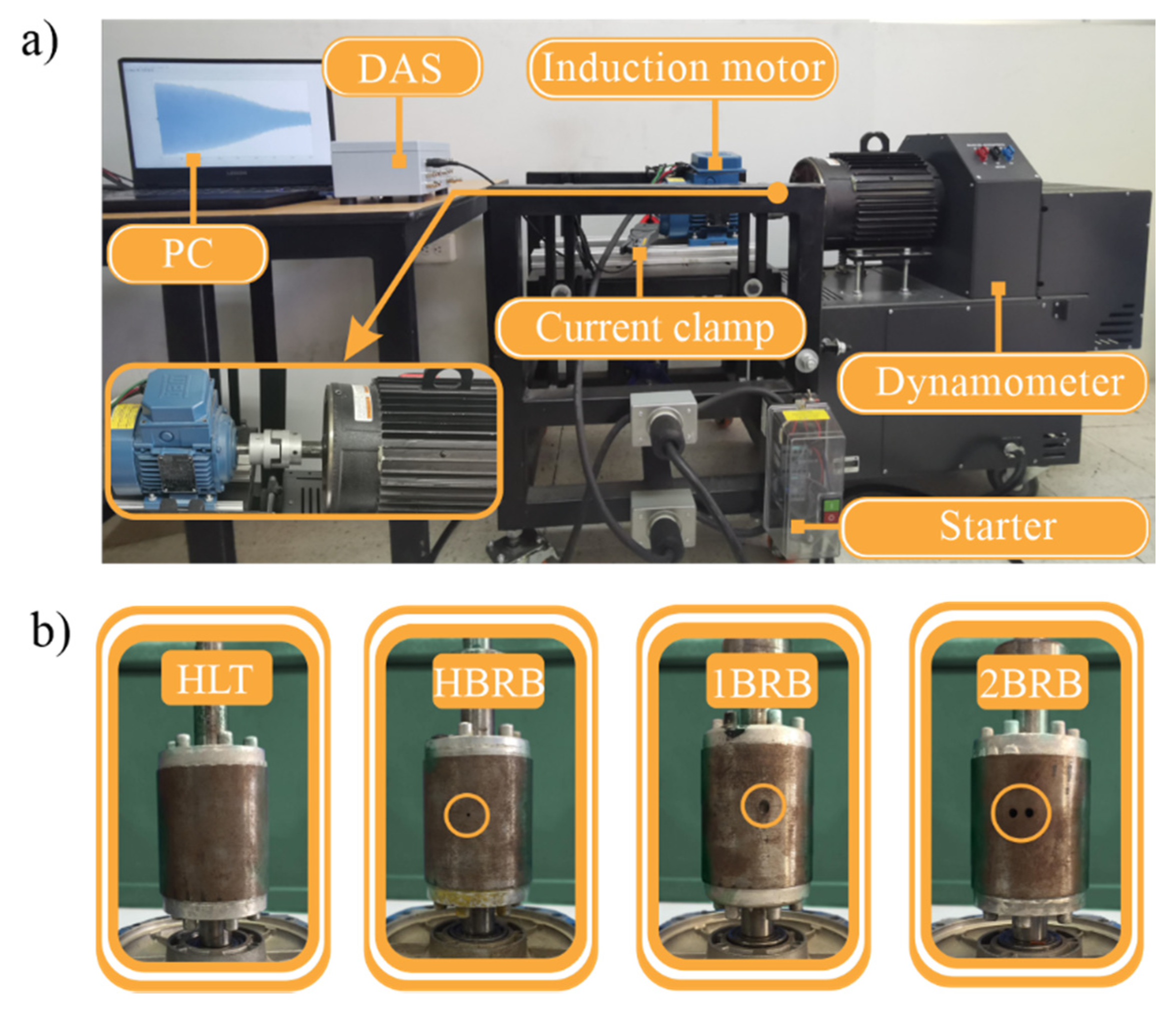
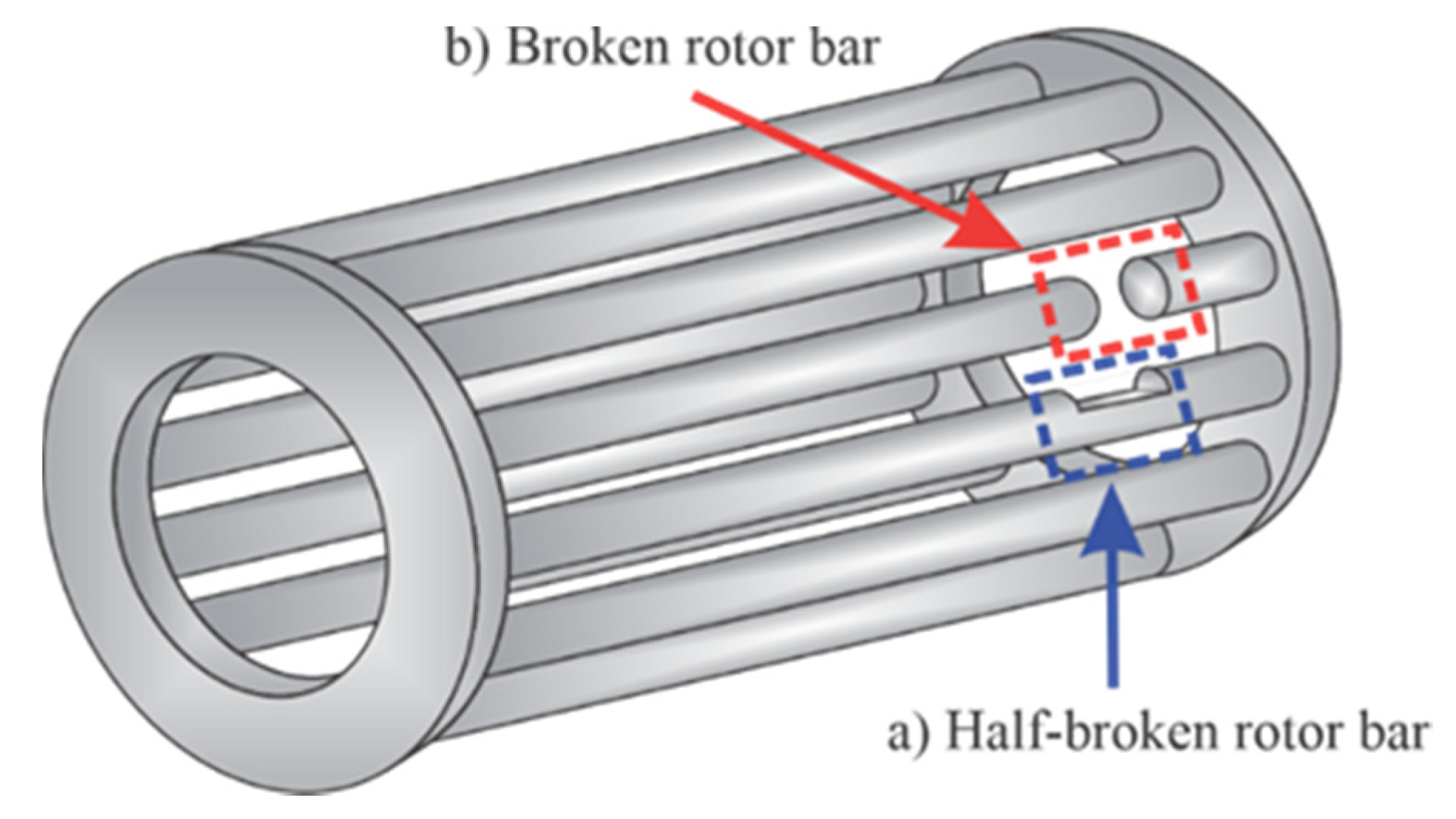
4.1. Experimental Setup
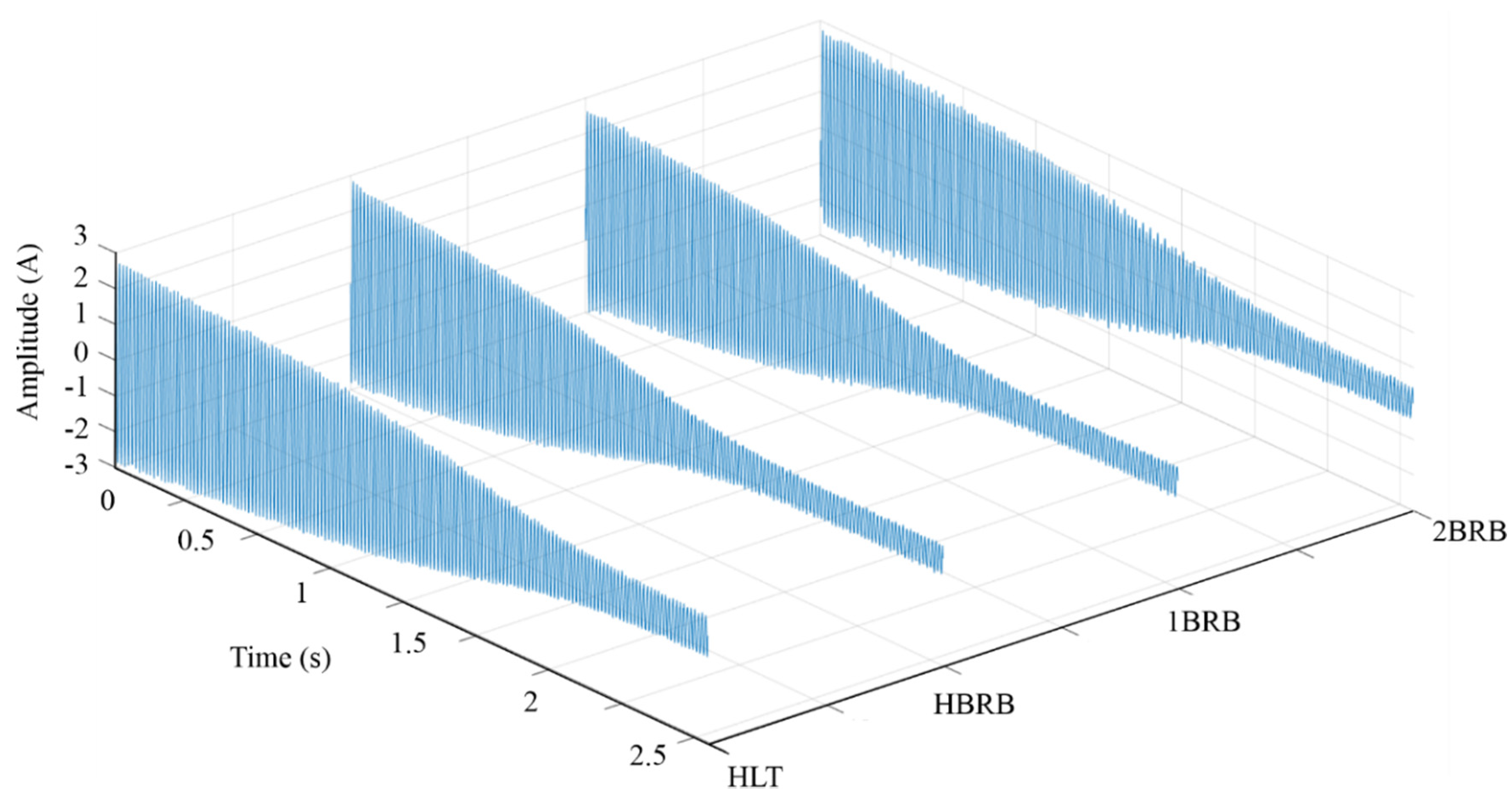
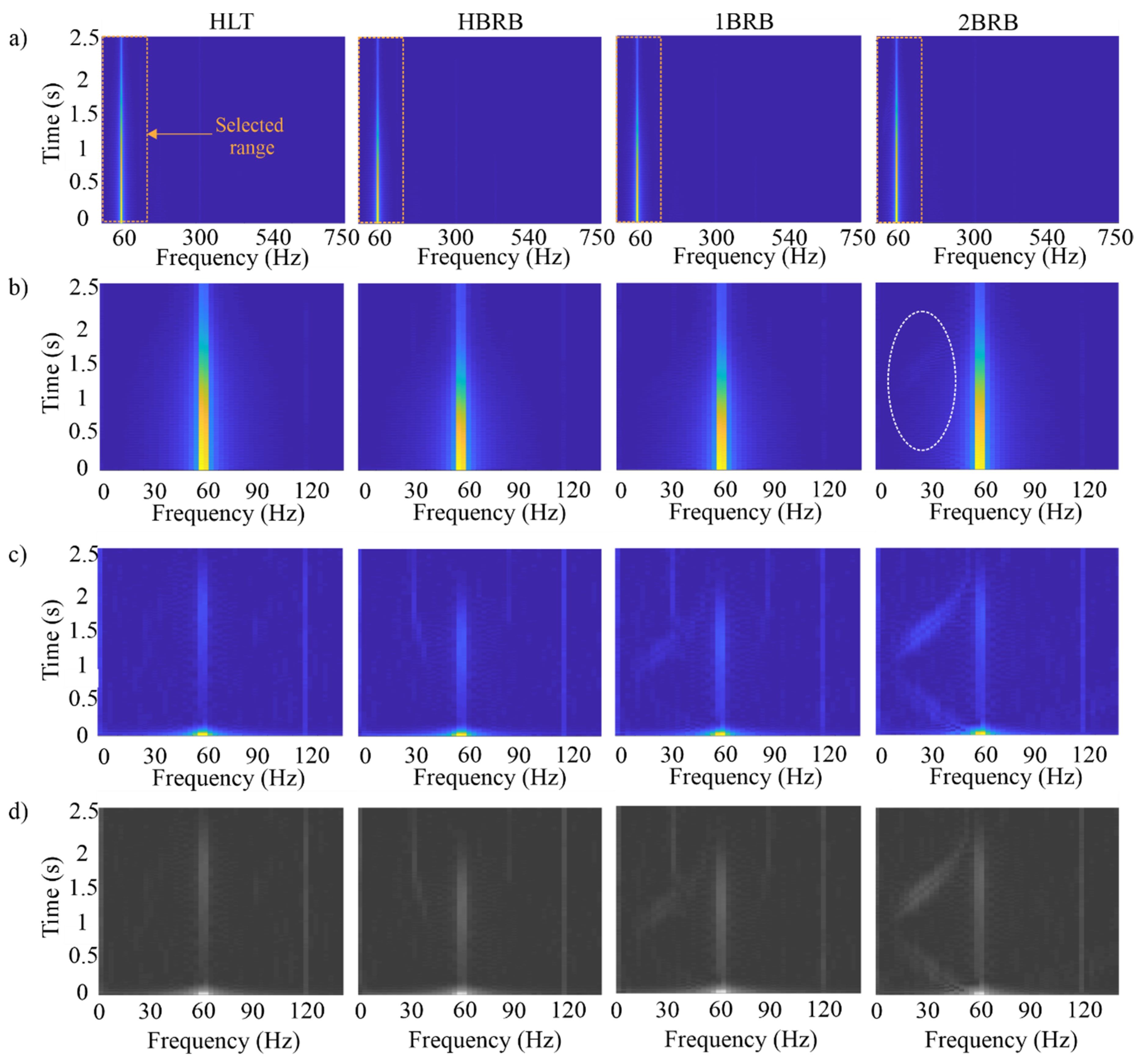
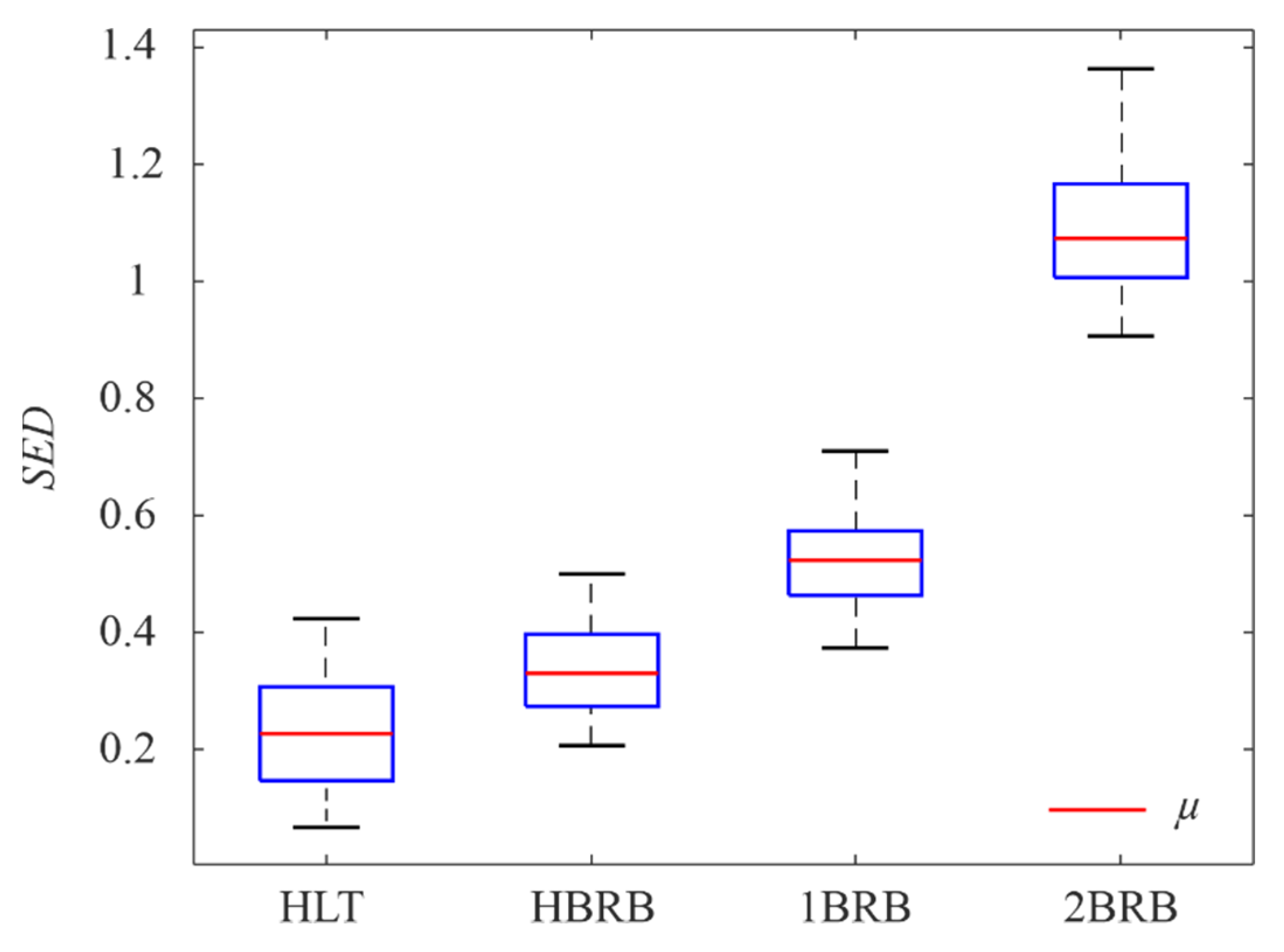
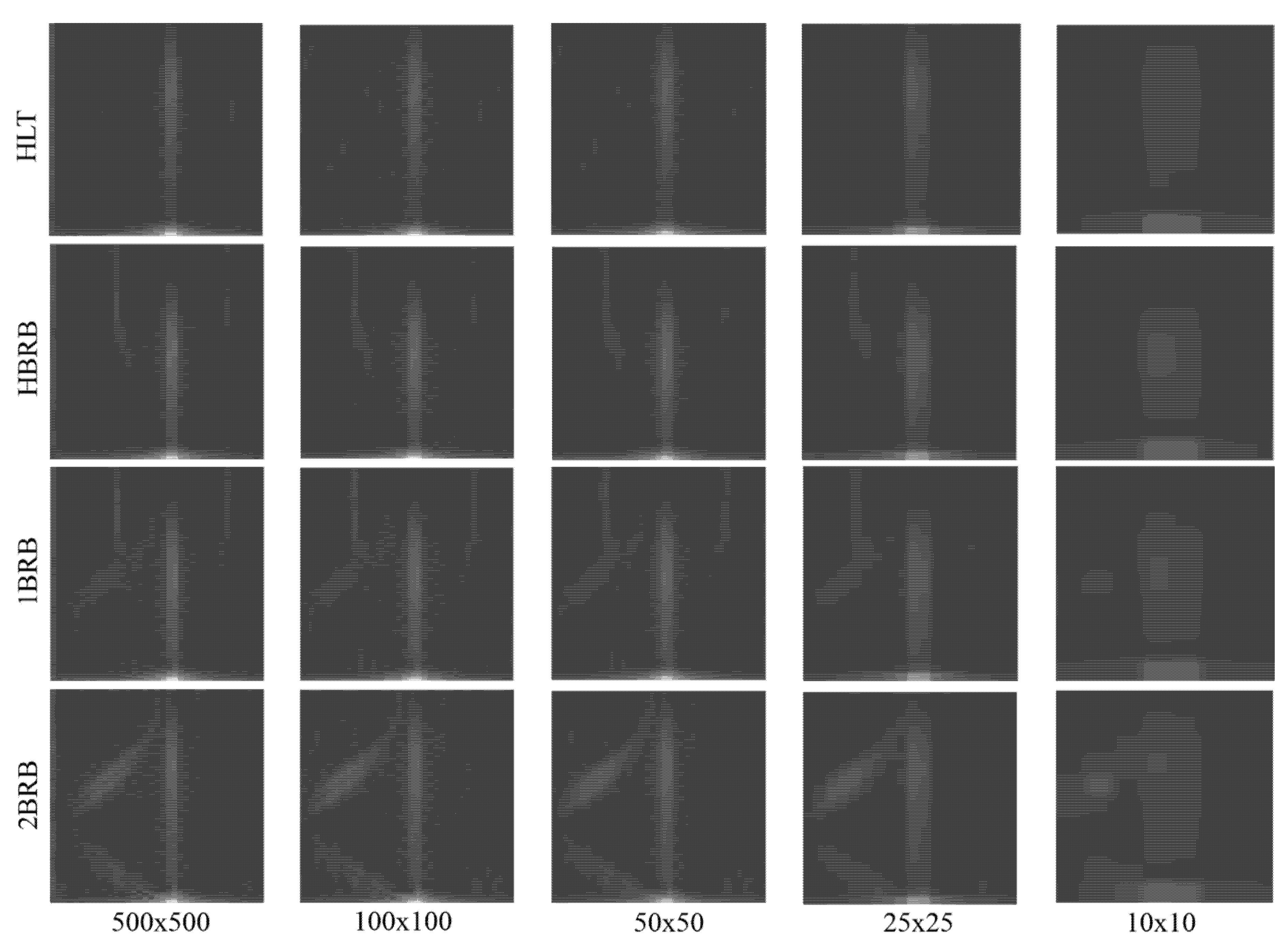
4.2. Signal Processing Results
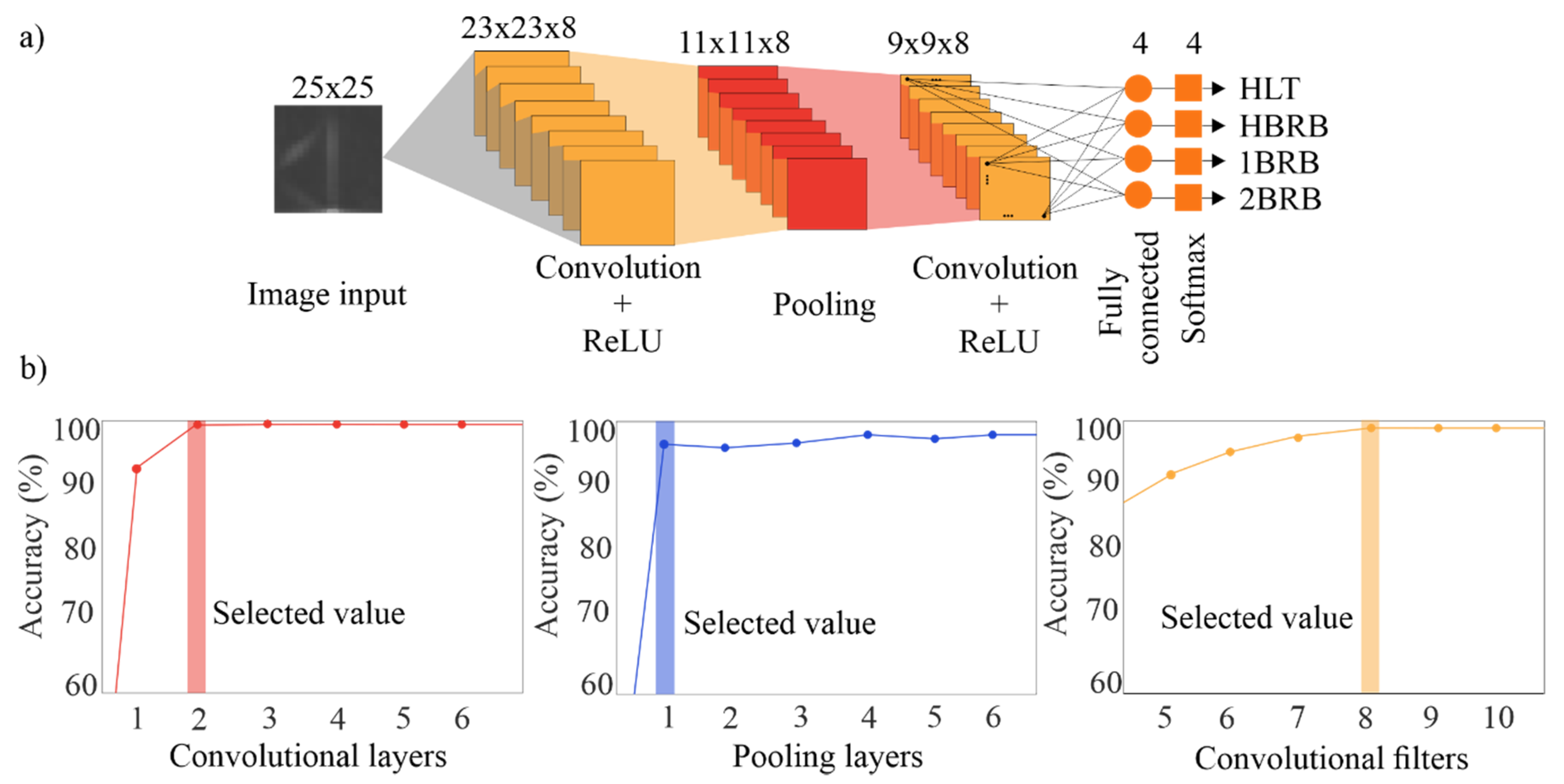
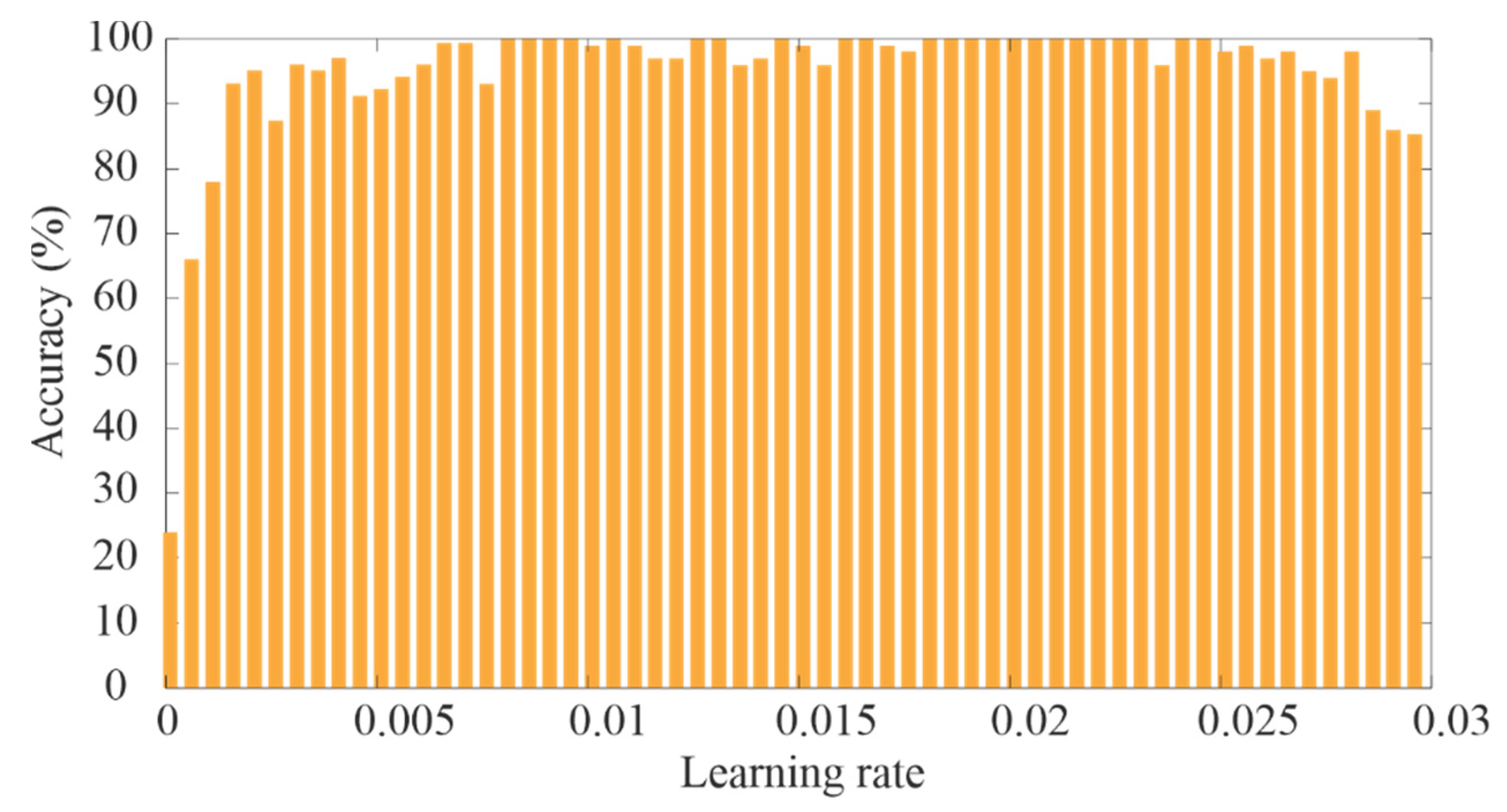
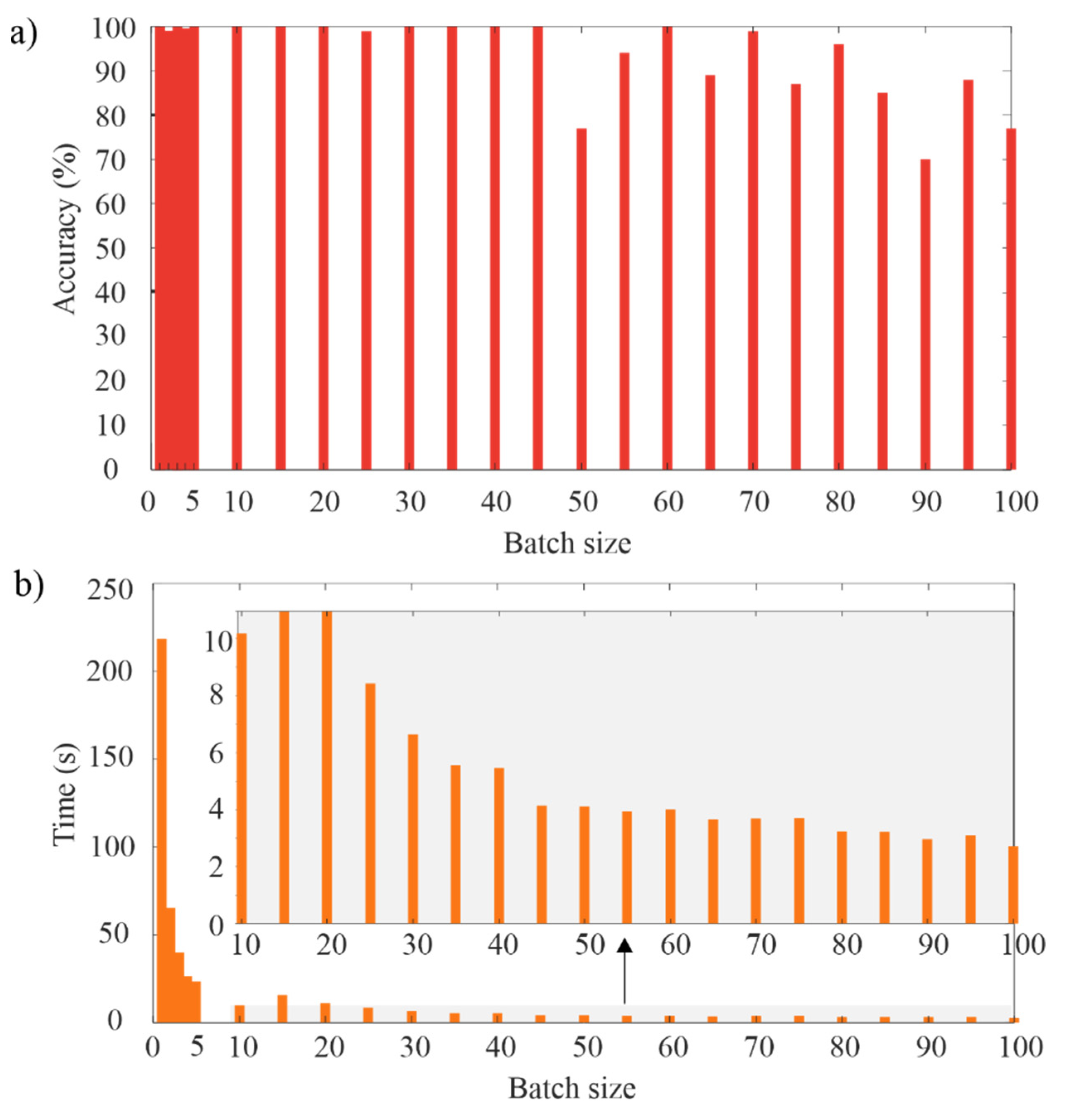
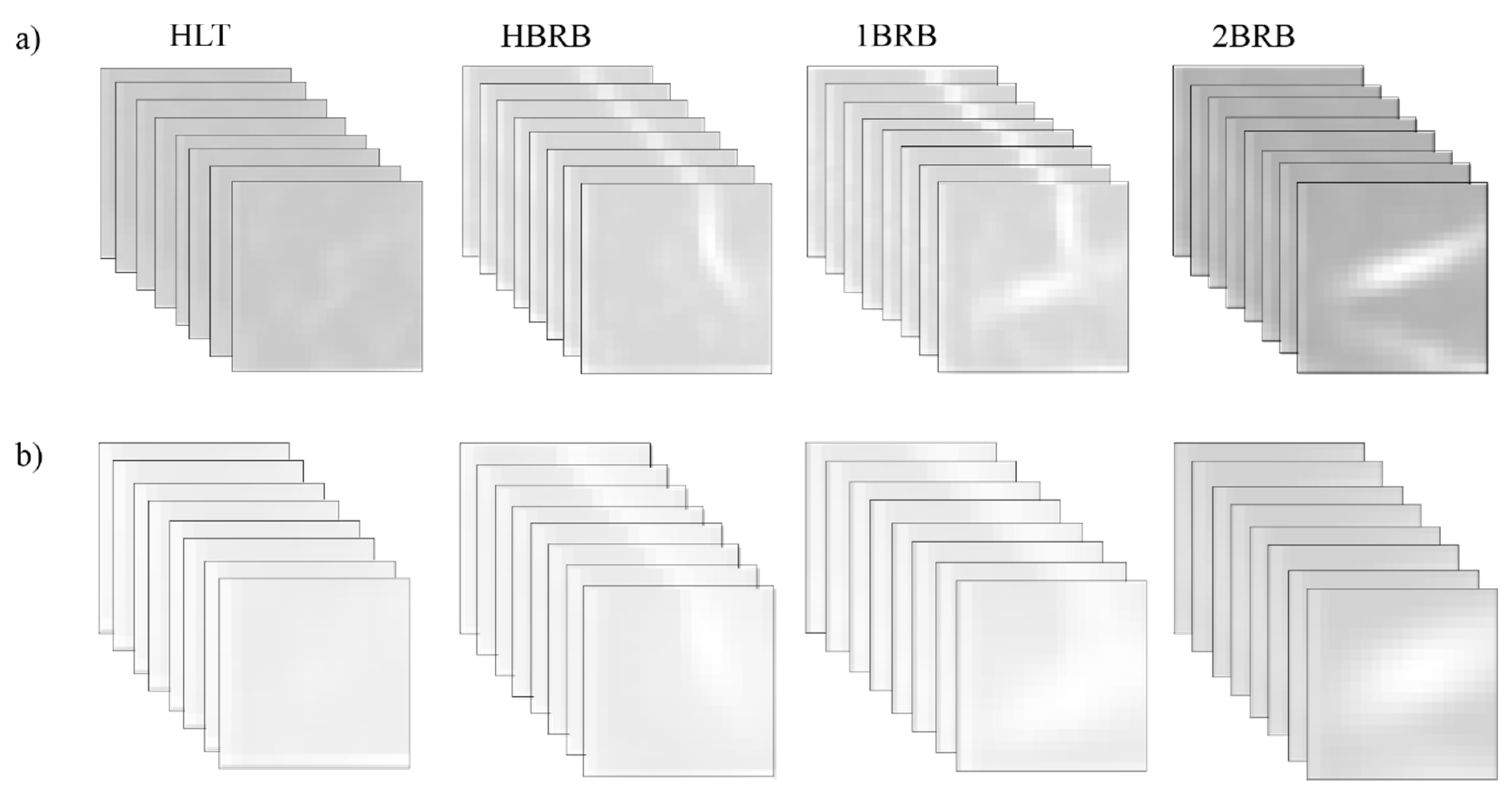
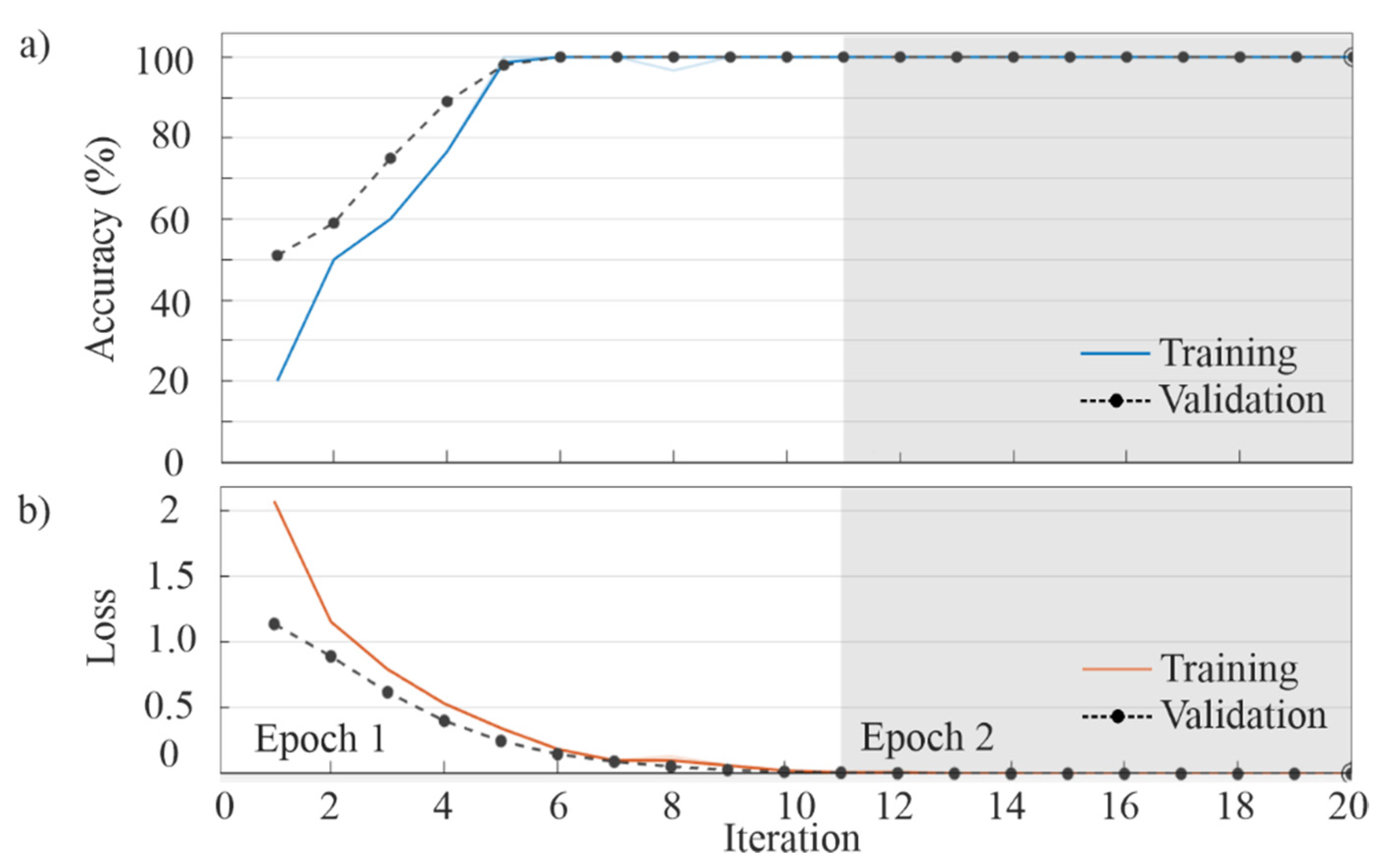
4.3. Convolutional Neural Network Results
4.4. Comparison with Previous Works
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Benbouzid, M.E.H. A review of induction motors signature analysis as a medium for faults detection. IEEE Trans. Ind. Electron. 2000, 47, 984–993. [Google Scholar] [CrossRef] [Green Version]
- Nandi, S.; Toliyat, H.A.; Li, X. Condition monitoring and fault diagnosis of electrical motors—A review. IEEE Trans. Energy Conver. 2005, 20, 719–729. [Google Scholar] [CrossRef]
- Kliman, G.B.; Koegl, R.A.; Stein, J.; Endicott, R.D.; Madden, M.W. Noninvasive detection of broken rotor bars in operating induction motors. IEEE Trans. Energy Conver. 1998, 3, 873–879. [Google Scholar] [CrossRef]
- Zamudio-Ramírez, I.; Osornio-Ríos, R.A.; Antonino-Daviu, J.A.; Quijano-Lopez, A. Smart-Sensor for the Automatic Detection of Electromechanical Faults in Induction Motors Based on the Transient Stray Flux Analysis. Sensors 2020, 20, 1477. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rodríguez, P.V.J.; Negrea, M.; Arkkio, A. A simplified scheme for induction motor condition monitoring. Mech. Syst. Signal Pr. 2008, 22, 1216–1236. [Google Scholar] [CrossRef]
- Pires, V.F.; Kadivonga, M.; Martins, J.F.; Pires, A.J. Motor square current signature analysis for induction motor rotor diagnosis. Measurement 2013, 46, 942–948. [Google Scholar] [CrossRef]
- Chen, S.; Živanović, R. Estimation of frequency components in stator current for the detection of broken rotor bars in induction machines. Measurement 2010, 43, 887–900. [Google Scholar] [CrossRef]
- Riera-Guasp, M.; Antonino-Daviu, J.A.; Capolino, G.A. Advances in electrical machine, power electronic, and drive condition monitoring and fault detection: State of the art. IEEE Trans. Ind. Electron. 2014, 62, 1746–1759. [Google Scholar] [CrossRef]
- Lizarraga-Morales, R.A.; Rodriguez-Donate, C.; Cabal-Yepez, E.; Lopez-Ramirez, M.; Ledesma-Carrillo, L.M.; Ferrucho-Alvarez, E.R. Novel FPGA-based methodology for early broken rotor bar detection and classification through homogeneity estimation. IEEE Trans. Instrum. Meas. 2017, 66, 1760–1769. [Google Scholar] [CrossRef]
- Glowacz, A. Diagnostics of DC and induction motors based on the analysis of acoustic signals. Meas. Sci. Rev. 2014, 14, 257–262. [Google Scholar] [CrossRef] [Green Version]
- Germen, E.; Başaran, M.; Fidan, M. Sound based induction motor fault diagnosis using Kohonen self-organizing map. Mech. Syst. Signal Process. 2014, 46, 45–58. [Google Scholar] [CrossRef]
- Bessam, B.; Menacer, A.; Boumehraz, M.; Cherif, H. DWT and Hilbert transform for broken rotor bar fault diagnosis in induction machine at low load. Energy Proc. 2015, 74, 1248–1257. [Google Scholar] [CrossRef] [Green Version]
- Rangel-Magdaleno, J.; Peregrina-Barreto, H.; Ramirez-Cortes, J.; Cruz-Vega, I. Hilbert spectrum analysis of induction motors for the detection of incipient broken rotor bars. Measurement 2017, 109, 247–255. [Google Scholar] [CrossRef]
- Valles-Novo, R.; de Jesus Rangel-Magdaleno, J.; Ramirez-Cortes, J.M.; Peregrina-Barreto, H.; Morales-Caporal, R. Empirical mode decomposition analysis for broken-bar detection on squirrel cage induction motors. IEEE Trans. Instrum. Meas. 2015, 64, 1118–1128. [Google Scholar] [CrossRef]
- Abdeljaber, O.; Avci, O.; Kiranyaz, M.S.; Boashash, B.; Sodano, H.; Inman, D.J. 1-D CNNs for structural damage detection: Verification on a structural health monitoring benchmark data. Neurocomputing 2018, 275, 1308–1317. [Google Scholar] [CrossRef]
- Huang, D.S. Systematic Theory of Neural Networks for Pattern Recognition; Publishing House of Electronic Industry of China: Beijing, China, 1996; p. 201. [Google Scholar]
- Morales-Perez, C.; Rangel-Magdaleno, J.; Peregrina-Barreto, H.; Amezquita-Sanchez, J.P.; Valtierra-Rodriguez, M. Incipient broken rotor bar detection in induction motors using vibration signals and the orthogonal matching pursuit algorithm. IEEE Trans. Instrum. Meas. 2018, 67, 2058–2068. [Google Scholar] [CrossRef]
- Pineda-Sanchez, M.; Riera-Guasp, M.; Antonino-Daviu, J.A.; Roger-Folch, J.; Perez-Cruz, J.; Puche-Panadero, R. Diagnosis of induction motor faults in the fractional Fourier domain. IEEE Trans. Instrum. Meas. 2010, 59, 2065–2075. [Google Scholar] [CrossRef]
- Saucedo-Dorantes, J.J.; Delgado-Prieto, M.; Osornio-Rios, R.A.; de Jesus Romero-Troncoso, R. Multifault diagnosis method applied to an electric machine based on high high dimensional feature reduction. IEEE Trans. Ind. Appl. 2017, 53, 3086–3097. [Google Scholar] [CrossRef] [Green Version]
- Saucedo-Dorantes, J.J.; Delgado-Prieto, M.; Romero-Troncoso, R.D.J.; Osornio-Rios, R.A. Multiple-fault detection and identification scheme based on hierarchical self-organizing maps applied to an electric machine. Appl. Soft. Comput. 2019, 81, 105497. [Google Scholar] [CrossRef]
- Pereira, L.A.; Fernandes, D.; Gazzana, D.S.; Libano, F.B.; Haffner, S. Application of the welch, burg and MUSIC methods to the detection of rotor cage faults of induction motors. In Proceedings of the IEEE/PES Transmission & Distribution Conference and Exposition: Latin America, Caracas, Venezuela, 15–18 August 2006; pp. 1–6. [Google Scholar]
- Ayhan, B.; Trussell, H.J.; Chow, M.Y.; Song, M.H. On the use of a lower sampling rate for broken rotor bar detection with DTFT and AR-based spectrum methods. IEEE Trans. Ind. Electron. 2008, 55, 1421–1434. [Google Scholar] [CrossRef] [Green Version]
- Amezquita-Sanchez, J.P.; Valtierra-Rodriguez, M.; Perez-Ramirez, C.A.; Camarena-Martinez, D.; Garcia-Perez, A.; Romero-Troncoso, R.J. Fractal dimension and fuzzy logic systems for broken rotor bar detection in induction motors at start-up and steady-state regimes. Meas. Sci. Technol. 2017, 28, 075001. [Google Scholar] [CrossRef]
- Rezazadeh Mehrjou, M.; Mariun, N.; Misron, N.; Radzi, M.A.M.; Musa, S. Broken rotor bar detection in LS-PMSM based on startup current analysis using wavelet entropy features. Appl. Sci. 2017, 7, 845. [Google Scholar] [CrossRef] [Green Version]
- Verma, A.; Sarangi, S. Fault diagnosis of broken rotor bars in induction motor using multiscale entropy and backpropagation neural network. In Intelligent Computing and Applications; Springer: New Delhi, India, 2015; pp. 393–404. [Google Scholar]
- Naha, A.; Samanta, A.K.; Routray, A.; Deb, A.K. A method for detecting half-broken rotor bar in lightly loaded induction motors using current. IEEE Trans. Instrum. Meas. 2016, 65, 1614–1625. [Google Scholar] [CrossRef]
- Bouzida, A.; Touhami, O.; Ibtiouen, R.; Belouchrani, A.; Fadel, M.; Rezzoug, A. Fault diagnosis in industrial induction machines through discrete wavelet transform. IEEE Trans. Ind. Electron. 2011, 58, 4385–4395. [Google Scholar] [CrossRef]
- Ameid, T.; Menacer, A.; Talhaoui, H.; Azzoug, Y. Discrete wavelet transform and energy eigen value for rotor bars fault detection in variable speed field-oriented control of induction motor drive. ISA Trans. 2018, 79, 217–231. [Google Scholar] [CrossRef]
- Lamim Filho, P.C.M.; Baccarini, L.M.R.; Batista, F.B.; Alves, D.A. Broken rotor bar detection using empirical demodulation and wavelet transform: Suitable for industrial application. Elect. Eng. 2018, 100, 2253–2260. [Google Scholar] [CrossRef]
- Antonino-Daviu, J.; Aviyente, S.; Strangas, E.G.; Riera-Guasp, M.; Roger-Folch, J.; Pérez, R.B. An EMD-based invariant feature extraction algorithm for rotor bar condition monitoring. In Proceedings of the IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics & Drives, Bologna, Italy, 5–8 September 2011; pp. 669–675. [Google Scholar]
- Fernandez-Cavero, V.; Morinigo-Sotelo, D.; Duque-Perez, O.; Pons-Llinares, J. A comparison of techniques for fault detection in inverter-fed induction motors in transient regime. IEEE Access. 2017, 5, 8048–8063. [Google Scholar] [CrossRef]
- Talib, M.F.; Othman, M.F.; Azli, N.H.N. Classification of machine fault using principle component analysis, general regression neural network and probabilistic neural network. J. Telecommun. Electron. Comput. Eng. 2016, 8, 93–98. [Google Scholar]
- Camarena-Martinez, D.; Valtierra-Rodriguez, M.; Amezquita-Sanchez, J.P.; Granados-Lieberman, D.; Romero-Troncoso, R.J.; Garcia-Perez, A. Shannon Entropy and-K-Means method for automatic diagnosis of broken rotor bars in induction motors using vibration signals. Shock. Vib. 2016, 2016, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Matić, D.; Kulić, F.; Pineda-Sánchez, M.; Kamenko, I. Support vector machine classifier for diagnosis in electrical machines: Application to broken bar. Expert. Syst. Appl. 2012, 39, 8681–8689. [Google Scholar] [CrossRef]
- Yang, B.S.; Oh, M.S.; Tan, A.C.C. Fault diagnosis of induction motor based on decision trees and adaptive neuro-fuzzy inference. Expert. Syst. Appl. 2009, 36, 1840–1849. [Google Scholar]
- Ahuja, N.; Lertrattanapanich, S.; Bose, N.K. Properties determining choice of mother wavelet. IEEE Proc. Vis. Image Signal Process. 2005, 152, 659–664. [Google Scholar] [CrossRef]
- Boashash, B.; Khan, N.A.; Ben-Jabeur, T. Time–frequency features for pattern recognition using high-resolution TFDs: A tutorial review. Digit. Signal Process. 2015, 40, 1–30. [Google Scholar] [CrossRef]
- Cai, T.; Duan, S.X.; Liu, B.Y.; Liu, F.R.; Chen, C.S. Real-valued MUSIC algorithm for power harmonics and interharmonics estimation. Int. J. Circuit Theory Appl. 2011, 39, 1023–1035. [Google Scholar] [CrossRef]
- Yao, G.; Lei, T.; Zhong, J. A review of Convolutional-Neural-Network-based action recognition. Pattern Recognit. Lett. 2019, 118, 14–22. [Google Scholar] [CrossRef]
- Kiranyaz, S.; Ince, T.; Gabbouj, M. Personalized monitoring and advance warning system for cardiac arrhythmias. Sci. Rep. 2017, 7, 1–8. [Google Scholar] [CrossRef]
- Deng, J.; Lu, Y.; Lee, V.C.S. Concrete crack detection with handwriting script interferences using faster region-based convolutional neural network. Comput. Aided. Civ. Inf. 2020, 35, 373–388. [Google Scholar] [CrossRef]
- Zhi, S.; Liu, Y.; Li, X.; Guo, Y. Toward real-time 3D object recognition: A lightweight volumetric CNN framework using multitask learning. Comput Graph. 2018, 71, 199–207. [Google Scholar] [CrossRef]
- Shao, S.; McAleer, S.; Yan, R.; Baldi, P. Highly accurate machine fault diagnosis using deep transfer learning. IEEE Trans. Ind. Inform. 2018, 15, 2446–2455. [Google Scholar] [CrossRef]
- Hoang, D.T.; Kang, H.J. Rolling element bearing fault diagnosis using convolutional neural network and vibration image. Cogn. Syst. Res. 2019, 53, 42–50. [Google Scholar] [CrossRef]
- Wen, L.; Li, X.; Gao, L.; Zhang, Y. A new convolutional neural network-based data-driven fault diagnosis method. IEEE Trans. Ind. Electron. 2017, 65, 5990–5998. [Google Scholar] [CrossRef]
- Wang, H.; Li, S.; Song, L.; Cui, L. A novel convolutional neural network based fault recognition method via image fusion of multi-vibration-signals. Comput. Ind. 2019, 105, 182–190. [Google Scholar] [CrossRef]
- Wang, L.H.; Zhao, X.P.; Wu, J.X.; Xie, Y.Y.; Zhang, Y.H. Motor fault diagnosis based on short-time Fourier transform and convolutional neural network. Chin. J. Mech. Eng. En. 2017, 30, 1357–1368. [Google Scholar] [CrossRef]
- Karpathy, A.; Toderici, G.; Shetty, S.; Leung, T.; Sukthankar, R.; Li, F.F. Large-scale video classification with convolutional neural networks. In Proceedings of the IEEE conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 1725–1732. [Google Scholar]
- Duque-Perez, O.; Garcia-Escudero, L.A.; Morinigo-Sotelo, D.; Gardel, P.E.; Perez-Alonso, M. Analysis of fault signatures for the diagnosis of induction motors fed by voltage source inverters using ANOVA and additive models. Electr. Power Syst. Res. 2015, 121, 1–13. [Google Scholar] [CrossRef]
- Romero-Troncoso, R. Multirate signal processing to improve FFT-based analysis for detecting faults in induction motors. IEEE Trans. Ind. Electron. 2016, 13, 1291–1300. [Google Scholar] [CrossRef]
- Antonino-Daviu, J.; Aviyente, S.; Strangas, E.G.; Riera-Guasp, M. Scale invariant feature extraction algorithm for the automatic diagnosis of rotor asymmetries in induction motors. IEEE Trans. Ind. Inform. 2013, 9, 100–108. [Google Scholar] [CrossRef]
- Rivera-Guillen, J.R.; De Santiago-Perez, J.J.; Amezquita-Sanchez, J.P.; Valtierra-Rodriguez, M.; Romero-Troncoso, R.J. Enhanced FFT-based method for incipient broken rotor bar detection in induction motors during the startup transient. Measurement 2018, 124, 277–285. [Google Scholar] [CrossRef]
- Proakis, J.; Manolakis, D. Digital Signal Processing: Principle, Algorithm, and Applications, 3rd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Tan, L.; Jiang, J. Infinite Impulse Response Filter Design. In Digital Signal Processing, 2nd ed.; Academic Press: Waltham, MA, USA, 2013; pp. 301–403. [Google Scholar]
- Nussbaumer, H.J. Fast Fourier Transform and Convolution Algorithms; Springer Science & Business Media: New York, NY, USA, 2000; Volume 2. [Google Scholar]
- Valtierra-Rodriguez, M.; Osornio-Rios, R.A.; Garcia-Perez, A.; Romero-Troncoso, R. FPGA-based neural network harmonic estimation for continuous monitoring of the power line in industrial applications. Electr. Power Syst. Res. 2013, 98, 51–57. [Google Scholar] [CrossRef]
- Kwok, H.K.; Jones, D.L. Improved instantaneous frequency estimation using an adaptive short-time Fourier transform. IEEE Trans. Signal Proces. 2000, 48, 2964–2972. [Google Scholar] [CrossRef]
- Gabor, D. Theory of communication. IEEE J. Inst. Electr. Eng. 1946, 93, 429–441. [Google Scholar] [CrossRef]
- Liu, T.; Xu, H.; Ragulskis, M.; Cao, M.; Ostachowicz, W. A Data-Driven Damage Identification Framework Based on Transmissibility Function Datasets and One-Dimensional Convolutional Neural Networks: Verification on a Structural Health Monitoring Benchmark Structure. Sensors 2020, 20, 1059. [Google Scholar] [CrossRef] [Green Version]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 1097–1105. [Google Scholar] [CrossRef]
- Ieracitano, C.; Mammone, N.; Bramanti, A.; Hussain, A.; Morabito, F.C. A Convolutional Neural Network approach for classification of dementia stages based on 2D-spectral representation of EEG recordings. Neurocomputing 2019, 323, 96–107. [Google Scholar] [CrossRef]
- Mammone, N.; Ieracitano, C.; Morabito, F.C. A deep CNN approach to decode motor preparation of upper limbs from time–frequency maps of EEG signals at source level. Neural Netw. 2020, 124, 357–372. [Google Scholar] [CrossRef] [PubMed]
- Scherer, D.; Müller, A.; Behnke, S. Evaluation of pooling operations in convolutional architectures for object recognition. In Proceedings of the International Conference on Artificial Neural Networks, Thessaloniki, Greece, 15–18 September 2010. [Google Scholar]
- Boudiaf, A.; Moussaoui, A.; Dahane, A.; Atoui, I. A comparative study of various methods of bearing faults diagnosis using the case Western Reserve University data. J. Fail. Anal. Prev. 2016, 16, 271–284. [Google Scholar] [CrossRef]
- Li, Y.; Wang, X.; Si, S.; Huang, S. Entropy based fault classification using the Case Western Reserve University data: A benchmark study. IEEE Trans. Reliab. 2020, 69, 754–767. [Google Scholar] [CrossRef]
- Zhang, R.; Tao, H.; Wu, L.; Guan, Y. Transfer learning with neural networks for bearing fault diagnosis in changing working conditions. IEEE Access. 2017, 5, 14347–14357. [Google Scholar] [CrossRef]
- Kannan, V.; Li, H.; Dao, D.V. Demodulation band optimization in envelope analysis for fault diagnosis of rolling element bearings using a real-coded genetic algorithm. IEEE Access. 2019, 7, 168828–168838. [Google Scholar] [CrossRef]
- Zhang, S.; Ye, F.; Wang, B.; Habetler, T.G. Semi-Supervised Learning of Bearing Anomaly Detection via Deep Variational Autoencoders. arXiv 2019, arXiv:1912.01096. [Google Scholar]
- Murphy, K.P. Machine Learning: A Probabilistic Perspective; The MIT Press: Cambridge, MA, USA, 2012. [Google Scholar]
- Camarena-Martinez, D.; Perez-Ramirez, C.A.; Valtierra-Rodriguez, M.; Amezquita-Sanchez, J.P.; Romero-Troncoso, R. Synchrosqueezing transform-based methodology for broken rotor bars detection in induction motors. Measurement 2016, 90, 519–525. [Google Scholar] [CrossRef]
- Abd-el-Malek, M.; Abdelsalam, A.K.; Hassan, O.E. Induction motor broken rotor bar fault location detection through envelope analysis of start-up current using Hilbert transform. Mech. Syst. Signal Process. 2017, 93, 332–350. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Type | Activations | Learnables |
|---|---|---|---|
| Input | Image input | 25 × 25 × 1 | - |
| Conv_1 | Convolution | 23 × 23 × 8 | Weights 3 × 3 × 1 × 8 and Bias 1 × 1 × 8 |
| Relu1 | Rectified linear unit | 23 × 23 × 8 | - |
| 2 × 2-MP | Max pooling | 11 × 11 × 8 | - |
| Conv_2 | Convolution | 9 × 9 × 8 | Weights 3 × 3 × 8 × 8 and Bias 1 × 1 × 8 |
| Relu2 | Rectified linear unit | 9 × 9 × 8 | - |
| FC | Fully connected | 1 × 1 × 4 | Weights 4 × 648 and Bias 4 × 1 |
| SM | Softmax | 1 × 1 × 4 | - |
| Class | Classification output | - | - |
| Target Class | |||||
|---|---|---|---|---|---|
| Predicted class | HLT | HBRB | 1BRB | 2BRB | |
| HLT | 25 | 0 | 0 | 0 | |
| HBRB | 0 | 25 | 0 | 0 | |
| 1BRB | 0 | 0 | 25 | 0 | |
| 2BRB | 0 | 0 | 0 | 25 | |
| Total accuracy (%) | 100 | ||||
| Work | Proposed Methods | Damage Level | Accuracy (%) |
|---|---|---|---|
| [9] | 1. Feature extraction is performed by using Homogeneity analysis 2. Gaussian probability density function is employed as classifier. | HBRB, 1- and 2BRB | 99 |
| [10] | 1. Features extraction is performed by using MUSIC technique 2. Bayes method is employed as classifier. | 1- and 2BRB | 100 |
| [12] | 1. Features extraction is performed by using Wavelet and Hilbert transforms. 2. Linear discriminant technique is employed as classifier. | 1- and 2BRB | 100 |
| [23] | 1. Feature extraction is performed by using Fractal dimension 2. Fuzzy logic is employed as classifier. | HBRB, 1- and 2BRB | 95 |
| [26] | 1. Features extraction is performed by using extended Kalman filter 2. MUSIC technique is employed as classifier. | HBRB and 1BRB | 100 |
| [43] | 1. Wavelet transform is used to transform the measured signals to images. 2. A CNN is employed as features estimator and classifier. | 3BRB | 99 |
| [70] | 1. Features extraction is performed by using Wavelet transform. 2. Correlation Pearson is employed as classifier. | HBRB, 1- and 2BRB | 95 |
| [71] | 1. Feature extraction is performed by using Hilbert transform. 2. Gaussian probability density function is employed as classifier. | HBRB, 1- and 1½BRB | 99 |
| Proposed work | 1. Short time Fourier transform is used to transform the measured signals to images. 2. A CNN is employed as features estimator and classifier. | HBRB, 1- and 2BRB | 100 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Valtierra-Rodriguez, M.; Rivera-Guillen, J.R.; Basurto-Hurtado, J.A.; De-Santiago-Perez, J.J.; Granados-Lieberman, D.; Amezquita-Sanchez, J.P. Convolutional Neural Network and Motor Current Signature Analysis during the Transient State for Detection of Broken Rotor Bars in Induction Motors. Sensors 2020, 20, 3721. https://doi.org/10.3390/s20133721
Valtierra-Rodriguez M, Rivera-Guillen JR, Basurto-Hurtado JA, De-Santiago-Perez JJ, Granados-Lieberman D, Amezquita-Sanchez JP. Convolutional Neural Network and Motor Current Signature Analysis during the Transient State for Detection of Broken Rotor Bars in Induction Motors. Sensors. 2020; 20(13):3721. https://doi.org/10.3390/s20133721
Chicago/Turabian StyleValtierra-Rodriguez, Martin, Jesus R. Rivera-Guillen, Jesus A. Basurto-Hurtado, J. Jesus De-Santiago-Perez, David Granados-Lieberman, and Juan P. Amezquita-Sanchez. 2020. "Convolutional Neural Network and Motor Current Signature Analysis during the Transient State for Detection of Broken Rotor Bars in Induction Motors" Sensors 20, no. 13: 3721. https://doi.org/10.3390/s20133721