Deterministic Lateral Displacement-Based Separation of Magnetic Beads and Its Applications of Antibody Recognition


Abstract
:1. Introduction
2. Materials and Methods
2.1. Reagents
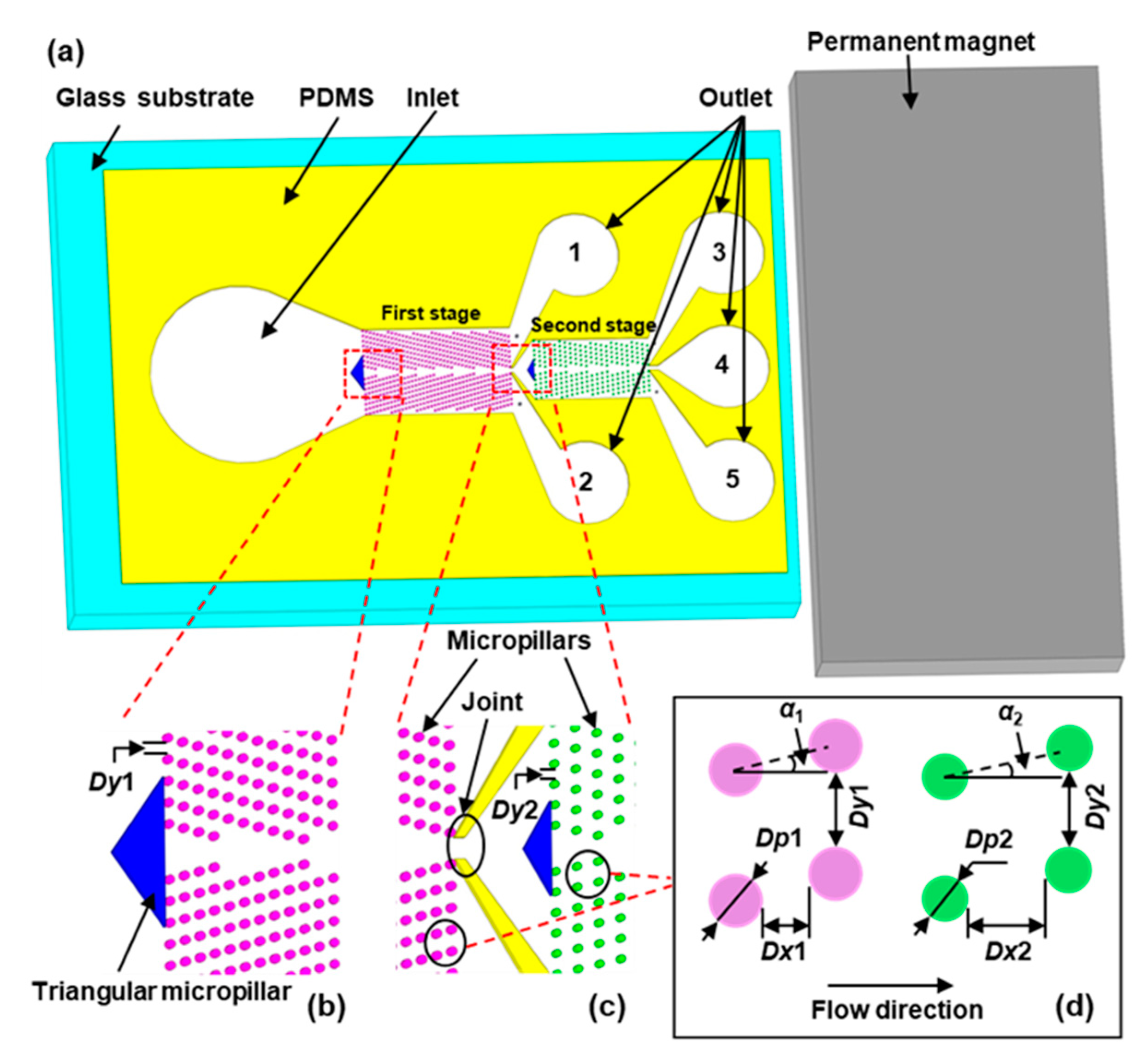
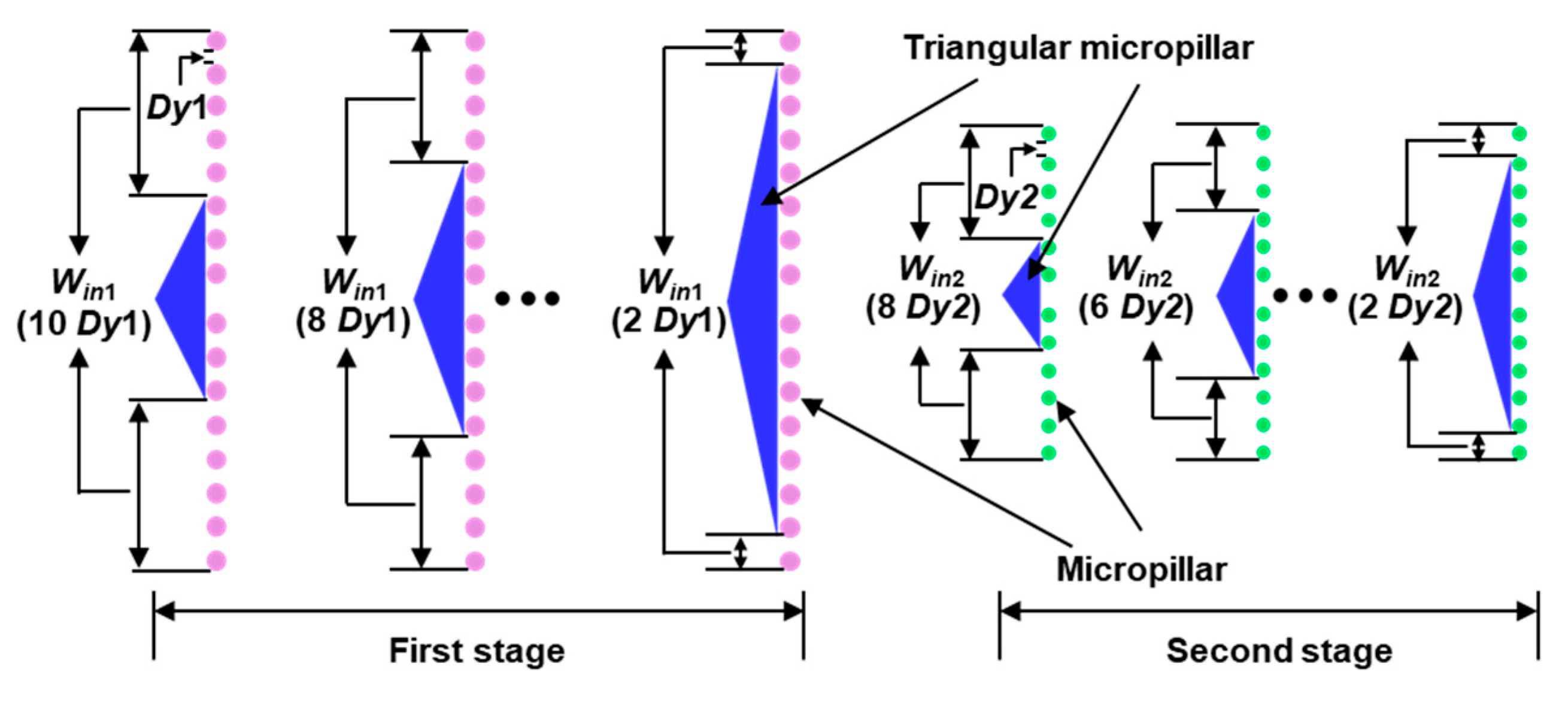
2.2. Microfluidic Chip Design and Fabrication
2.3. Experimental Setup and Method
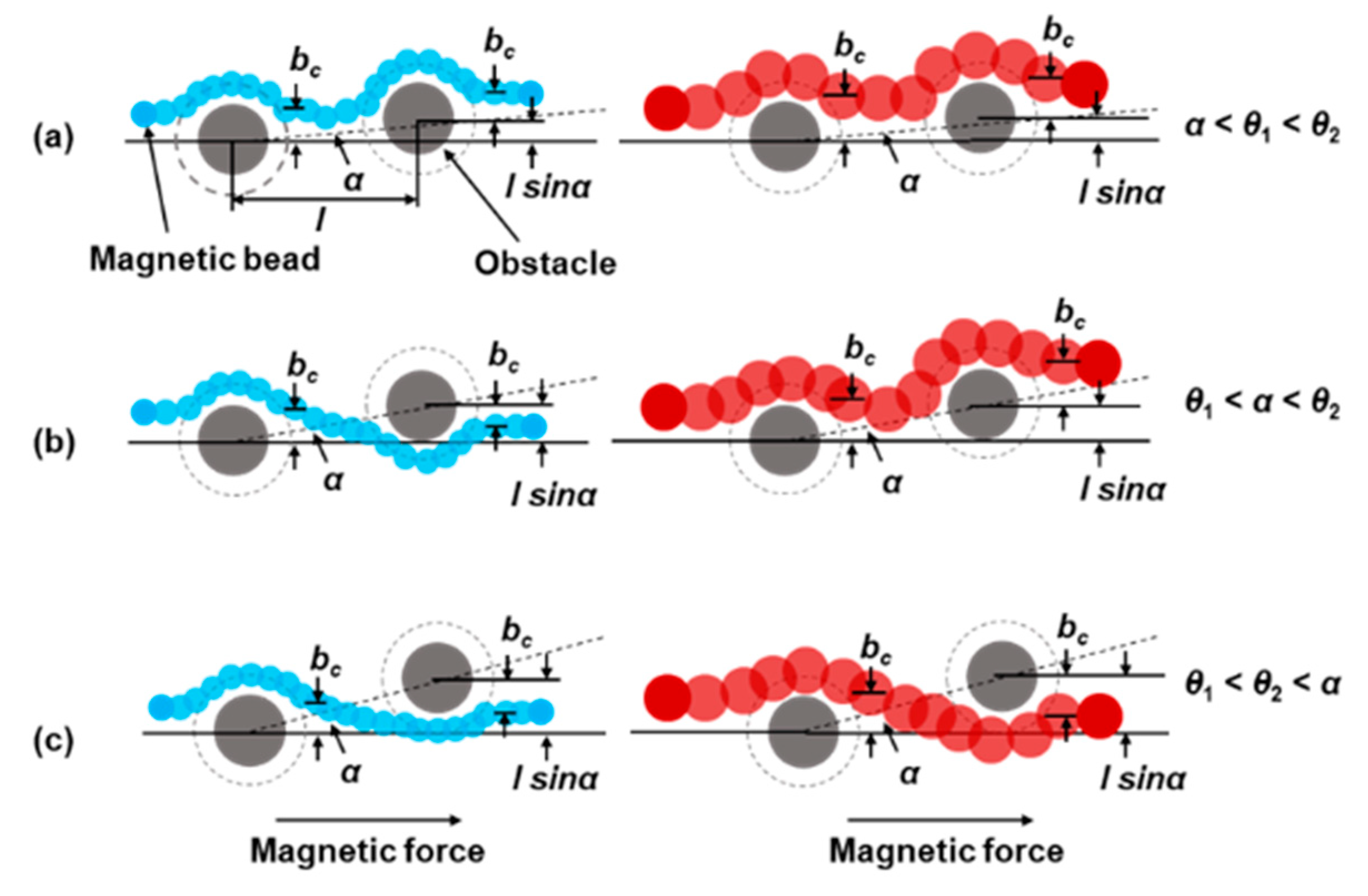
3. Deterministic Model
4. Results and Discussion
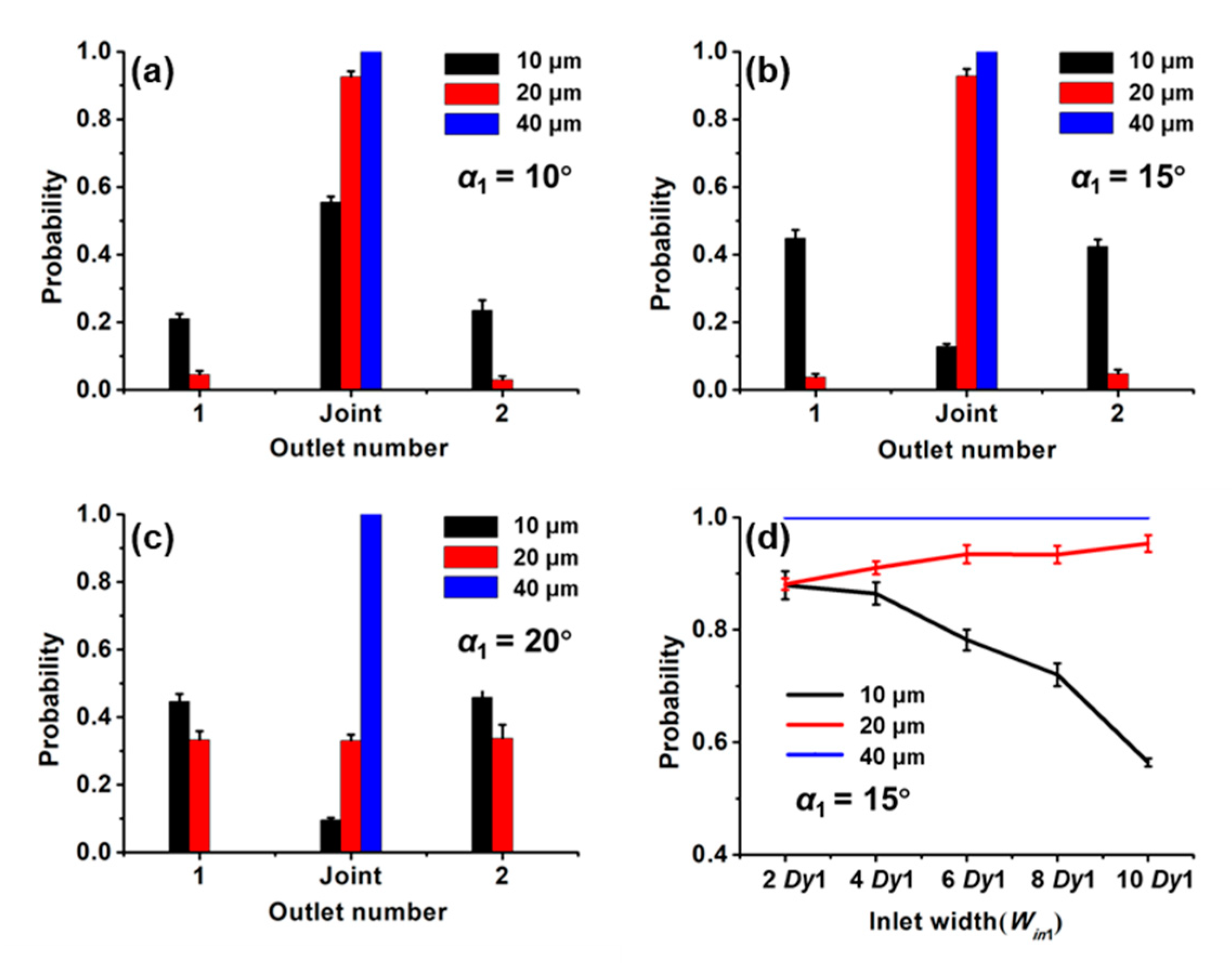
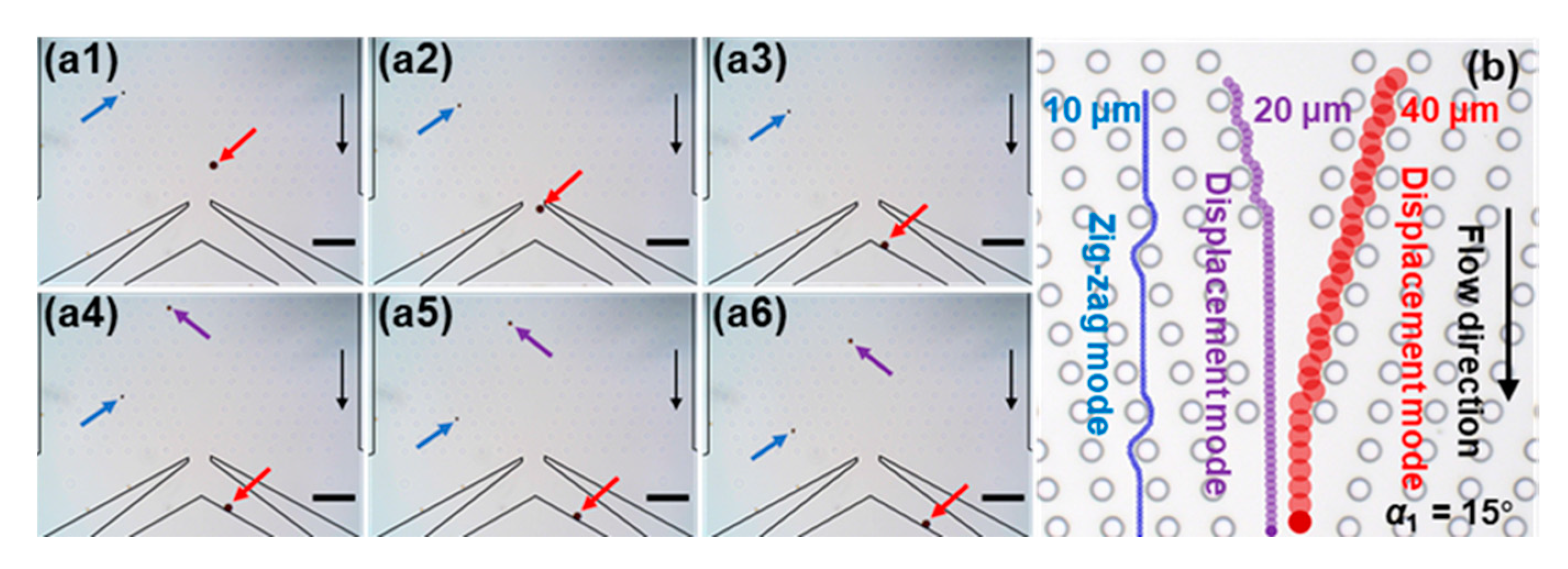
4.1. The Influence of the First Stage on the Separating Efficiency
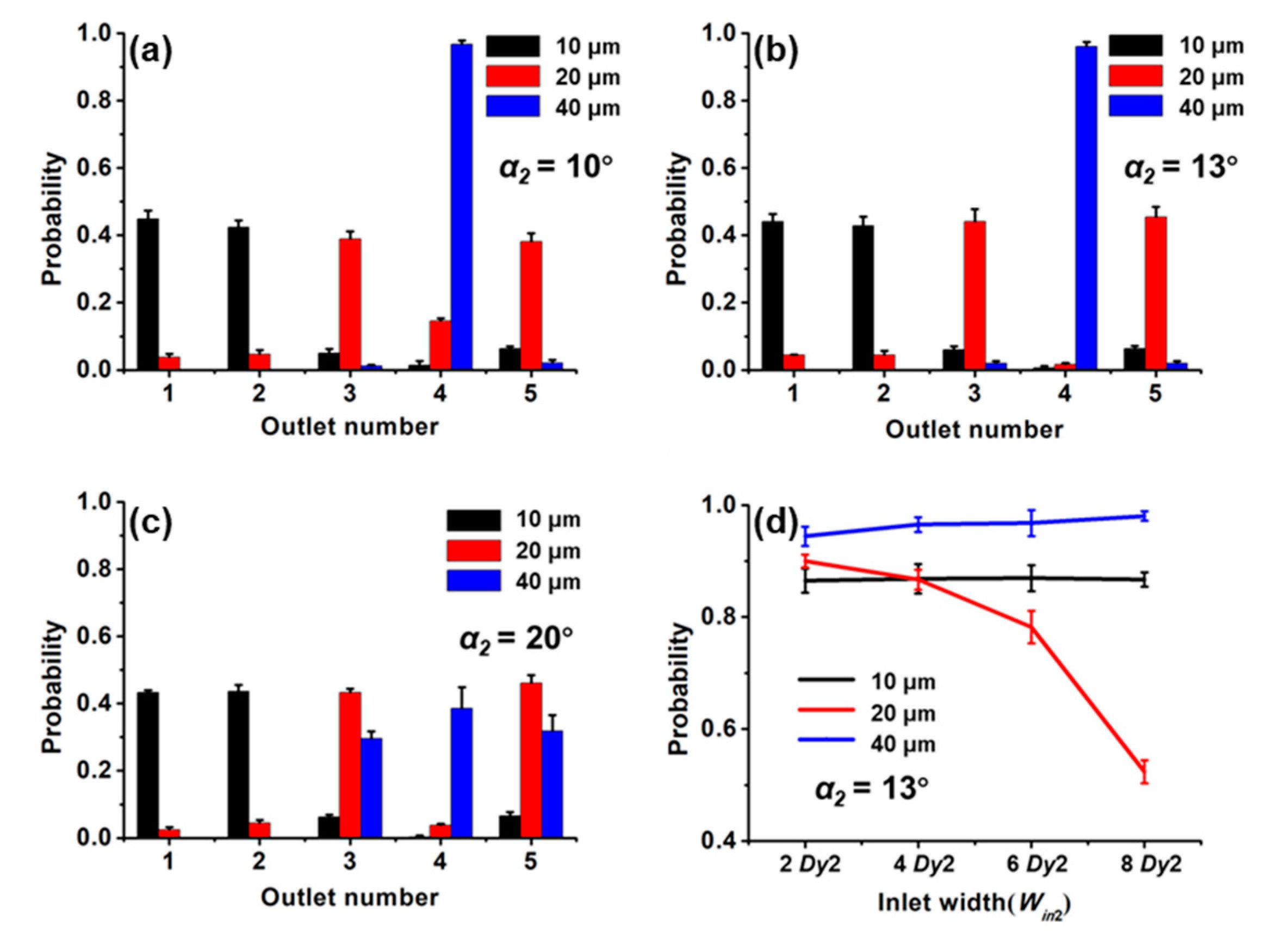
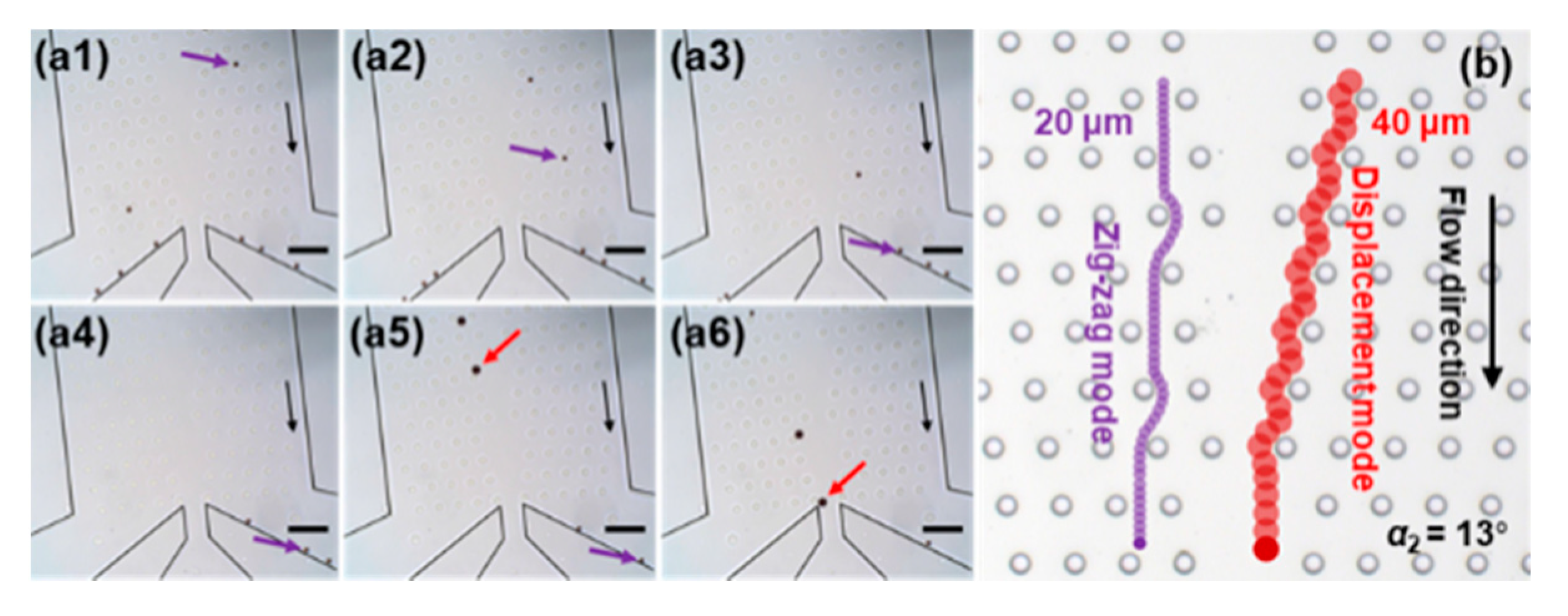
4.2. The Influence of the Second Stage on the Separating Efficiency
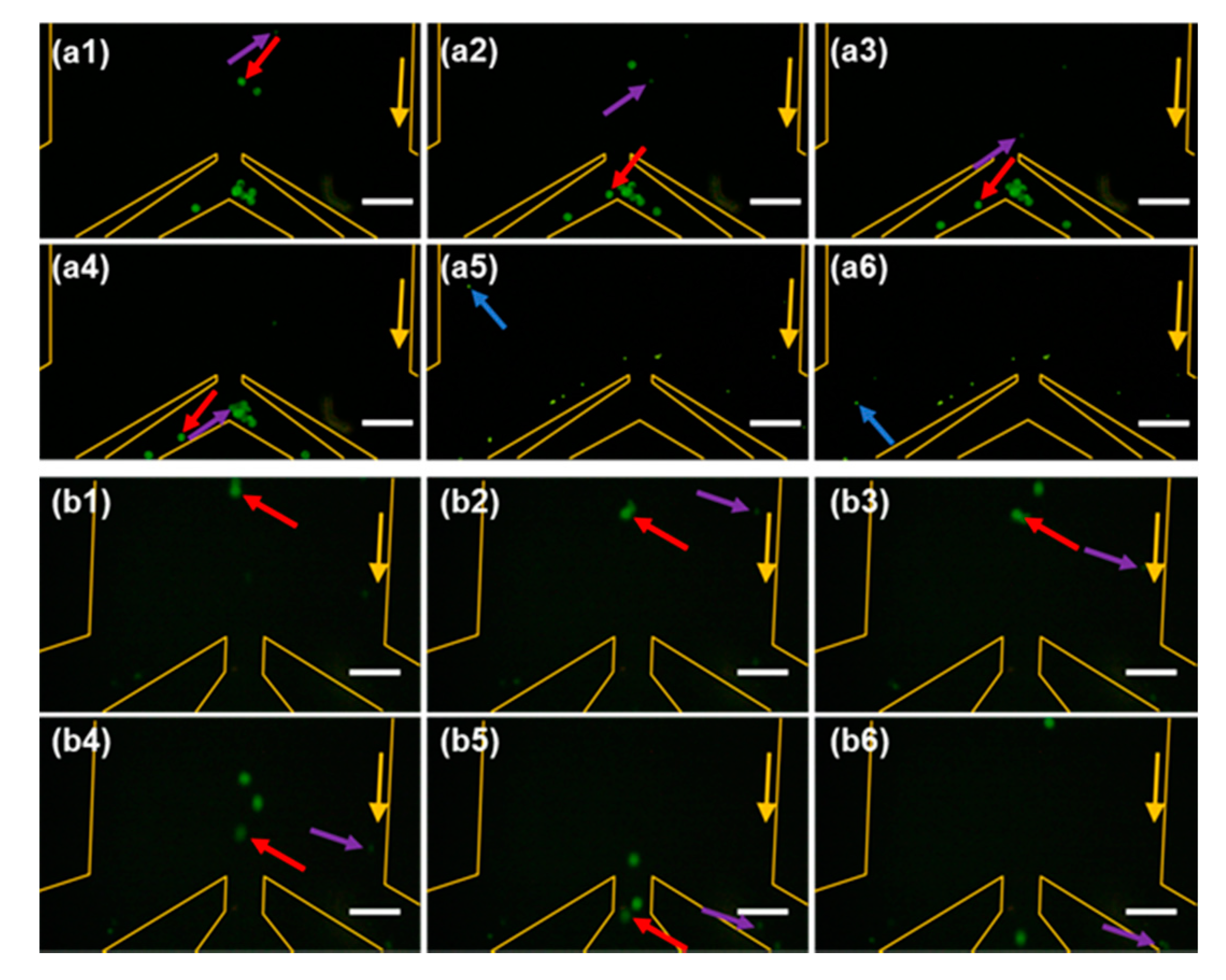
4.3. Antibody Recognition and Separation
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Xavier, M.; Holm, S.H.; Beech, J.P.; Spencer, D.; Tegenfeldt, J.O.; Oreffo, R.O.C. Label-free enrichment of primary human skeletal progenitor cells using deterministic lateral displacement. Lab Chip 2019, 19, 513–523. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hattori, Y.; Shimada, T.; Yasui, T.; Kaji, N.; Baba, Y. Micro- and Nanopillar Chips for Continuous Separation of Extracellular Vesicles. Anal. Chem. 2019, 91, 6514–6521. [Google Scholar] [CrossRef] [PubMed]
- Smith, J.T.; Wunsch, B.H.; Dogra, N.; Ahsen, M.E.; Lee, K.; Yadav, K.K. Integrated nanoscale deterministic lateral displacement arrays for separation of extracellular vesicles from clinically-relevant volumes of biological samples. Lab Chip 2018, 18, 3913–3925. [Google Scholar] [CrossRef] [PubMed]
- Xiang, N.; Wang, J.; Li, Q.; Han, Y.; Huang, D.; Ni, Z. Precise size-based cell separation via the coupling of inertial microfluidics and deterministic lateral displacement. Anal. Chem. 2019, 91, 10328–10334. [Google Scholar] [CrossRef] [PubMed]
- Tottori, N.; Hatsuzawa, T.; Nisisako, T. Separation of main and satellite droplets in a deterministic lateral displacement microfluidic device. RSC Adv. 2017, 7, 35516–35524. [Google Scholar] [CrossRef] [Green Version]
- Loutherback, K.; Chou, K.S.; Newman, J.; Puchalla, J.; Austin, R.H.; Sturm, J.C. Improved performance of deterministic lateral displacement arrays with triangular posts. Microfluid. Nanofluidics 2010, 9, 1143–1149. [Google Scholar] [CrossRef]
- Ranjan, S.; Zeming, K.K.; Jureen, R.; Fisher, D.; Zhang, Y. DLD pillar shape design for efficient separation of spherical and non-spherical bioparticles. Lab Chip 2014, 14, 4250–4262. [Google Scholar] [CrossRef]
- Hyun, J.C.; Hyun, J.; Wang, S.; Yang, S. Improved pillar shape for deterministic lateral displacement separation method to maintain separation efficiency over a long period of time. Sep. Purif. Technol. 2017, 172, 258–267. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, H.; Li, Y.; Li, X.; Wu, J.; Qian, S. Dynamic control of particle separation in deterministic lateral displacement separator with viscoelastic fluids. Sci. Rep. 2018, 8, 1–9. [Google Scholar] [CrossRef]
- Beech, J.P.; Jonsson, P.; Tegenfeldt, J.O. Tipping the balance of deterministic lateral displacement devices using dielectrophoresis. Lab Chip 2009, 9, 2698–2706. [Google Scholar] [CrossRef]
- Jiang, M.L.; Mazzeo, A.D.; Drazer, G. Centrifuge-based deterministic lateral displacement separation. Microfluid. Nanofluidics 2016, 20, 17. [Google Scholar] [CrossRef] [Green Version]
- Chang, S.; Cho, Y.H. A continuous size-dependent particle separator using a negative dielectrophoretic virtual pillar array. Lab Chip 2008, 8, 1930–1936. [Google Scholar] [CrossRef] [PubMed]
- Calero, V.; Garcia-Sanchez, P.; Honrado, C.; Ramos, A.; Morgan, H. AC electrokinetic biased deterministic lateral displacement for tunable particle separation. Lab Chip 2019, 19, 1386–1396. [Google Scholar] [CrossRef] [PubMed]
- Yao, J.; Chen, J.X.; Cao, X.D.; Dong, H. Combining 3D sidewall electrodes and contraction/expansion microstructures in microchip promotes isolation of cancer cells from red blood cells. Talanta 2019, 196, 546–555. [Google Scholar] [CrossRef]
- Devendra, R.; Drazer, G. Gravity Driven Deterministic Lateral Displacement for Particle Separation in Microfluidic Devices. Anal. Chem. 2012, 84, 10621–10627. [Google Scholar] [CrossRef]
- Du, S.Q.; Drazer, G. Gravity driven deterministic lateral displacement for suspended particles in a 3D obstacle array. Sci. Rep. 2016, 6, 31428. [Google Scholar] [CrossRef]
- Wang, X.B.; Sun, L.Y.; Zhang, H.M.; Wei, L.; Qu, W.; Zeng, Z.G. Microfluidic chip combined with magnetic-activated cell sorting technology for tumor antigen-independent sorting of circulating hepatocellular carcinoma cells. PeerJ 2019, 7, 1–17. [Google Scholar] [CrossRef]
- Saliba, A.E.; Saias, L.; Psychari, E.; Minc, N.; Simon, D.; Bidard, F.C. Microfluidic sorting and multimodal typing of cancer cells in self-assembled magnetic arrays. Proc. Natl. Acad. Sci. USA 2010, 107, 14524–14529. [Google Scholar] [CrossRef] [Green Version]
- Song, Z.Y.; Li, M.Q.; Li, B.; Yan, Y.M.; Song, Y.X. Automatic detecting and counting magnetic beads-labeled target cells from a suspension in a microfluidic chip. Electrophoresis 2019, 40, 897–905. [Google Scholar] [CrossRef]
- Wunsch, B.H.; Kim, S.C.; Gifford, S.M.; Astier, Y.; Wang, C.; Bruce, R.L. Gel-on-a-chip: Continuous, velocity-dependent DNA separation using nanoscale lateral displacement. Lab Chip 2019, 19, 1567–1578. [Google Scholar] [CrossRef]
- Li, B.; Pu, W.Y.; Xu, H.X.; Ge, L.L.; Kwok, H.F.; Hu, L.H. Magneto-controlled flow-injection device for electrochemical immunoassay of alpha-fetoprotein on magnetic beads using redox-active ferrocene derivative polymer nanospheres. Analyst 2019, 144, 1433–1441. [Google Scholar] [CrossRef]
- Saias, L.; Saliba, A.E.; Viovy, J.L.; Pierga, J.Y.; Vielh, P.; Farace, F. Microfluidic magnetic cell sorting system for cancer diagnosis. Houille Blanche-Rev. Int. 2009, 105–111. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.C.; Wunsch, B.H.; Hu, H.; Smith, J.T.; Austin, R.H.; Stolovitzky, G. Broken flow symmetry explains the dynamics of small particles in deterministic lateral displacement arrays. Proc. Natl. Acad. Sci. USA 2017, 114, 5034–5041. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Herrmann, J.; Karweit, M.; Drazer, G. Separation of suspended particles in microfluidic systems by directional locking in periodic fields. Phys. Rev. E 2009, 79, 061404. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hanasoge, S.; Devendra, R.; Diez, F.J.; Drazer, G. Electrokinetically driven deterministic lateral displacement for particle separation in microfluidic devices. Microfluid. Nanofluidics 2015, 18, 1195–1200. [Google Scholar] [CrossRef] [Green Version]
- Du, S.Q.; Drazer, G. Deterministic separation of suspended particles in a reconfigurable obstacle array. J. Micromech. Microeng. 2015, 25, 114002. [Google Scholar] [CrossRef]
- Boulland, J.L.; Leung, D.S.Y.; Thuen, M.; Vik-Mo, E.; Joel, M.; Perreault, M.C. Evaluation of Intracellular Labeling with Micron-Sized Particles of Iron Oxide (MPIOs) as a General Tool for In Vitro and In Vivo Tracking of Human Stem and Progenitor Cells. Cell Transplant. 2012, 21, 1743–1759. [Google Scholar] [CrossRef]
- Chen, Y.P.; Xianyu, Y.L.; Wang, Y.; Zhang, X.Q.; Cha, R.T.; Sun, J.S. One-Step Detection of Pathogens and Viruses: Combining Magnetic Relaxation Switching and Magnetic Separation. ACS Nano 2015, 9, 3184–3191. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trajectories of Magnetic Beads in the First Stage | Trajectories of Magnetic Beads in the Second Stage | Types of Magnetic Beads | Types of Antibodies | Typical Percentage |
|---|---|---|---|---|
| Zigzag mode | —— | 10 μm | Mouse anti-human AFP | 87% |
| Displacement mode | Zigzag mode | 20 μm | Mouse anti-human PSA | 89% |
| Displacement mode | Displacement mode | 40 μm | Mouse anti-human HBsAg | 94% |
| Displacement mode | Zigzag mode, Displacement mode | 20 μm, 40 μm | Mouse anti-human PSA, Mouse anti-human HBsAg | 89%, 94% |
| Zigzag mode, Displacement mode | Zigzag mode | 10 μm, 20 μm | Mouse anti-human AFP, Mouse anti-human PSA | 87%, 89% |
| Zigzag mode, Displacement mode | Displacement mode | 10 μm, 40 μm | Mouse anti-human AFP, Mouse anti-human HBsAg | 87%, 94% |
| Zigzag mode, Displacement mode | Zigzag mode, Displacement mode | 10 μm, 20 μm, 40 μm | Mouse anti-human AFP, Mouse anti-human PSA, Mouse anti-human HBsAg | 87%, 89%, 94% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Zeng, J.; Han, D.; Deng, J.; Hu, N.; Zheng, X.; Yang, J. Deterministic Lateral Displacement-Based Separation of Magnetic Beads and Its Applications of Antibody Recognition. Sensors 2020, 20, 2846. https://doi.org/10.3390/s20102846
Zhang H, Zeng J, Han D, Deng J, Hu N, Zheng X, Yang J. Deterministic Lateral Displacement-Based Separation of Magnetic Beads and Its Applications of Antibody Recognition. Sensors. 2020; 20(10):2846. https://doi.org/10.3390/s20102846
Chicago/Turabian StyleZhang, Haichao, Junyi Zeng, Dandan Han, Jinan Deng, Ning Hu, Xiaolin Zheng, and Jun Yang. 2020. "Deterministic Lateral Displacement-Based Separation of Magnetic Beads and Its Applications of Antibody Recognition" Sensors 20, no. 10: 2846. https://doi.org/10.3390/s20102846