1. Introduction
Induction motors play an important role in many industrial and on-board applications because of their low cost, simple construction, and high reliability. It is well known that faulty bearings contribute to most of the failures in rotating machinery [
1,
2]. Depending on the type and size of the machine, bearing failure distributions vary from about 40% to about 90% from large to small machines [
3]. In fact, bearings, even when properly designed, are sensitive components and failure is often due to inadequate operating conditions or failures in maintenance, which are more serious on marine ships than on land, such as excessive loading, shaft misalignment, wrong mounting, improper lubrication, etc. [
4].
Fatigue in rolling element bearings, resulting in spalling of the races and rolling elements, is the most common cause of bearing failures. There are three types of fatigue in bearings: surface distress, fatigue pitting and fatigue spalling [
5]. Surface distress appears as a smooth surface resulting from plastic deformation in the asperity region (typically less than 10 μm). Pitting appears as shallow craters in contact surfaces with a depth of, at most, the thickness of the work-hardened layer (approximately 10 μm). Spalling leaves deeper cavities at contact surfaces with a depth of 20–100 μm [
6].
Bearing faults are generally slowly progressive [
7]. The appearance of the first spall does not cause immediate breakdown [
8], and also does not mean the end of the bearing’s useful life [
9]. A premature removal of the bearing from service may be very expensive [
6]. The size of the spalling area has a significant influence on the operation performance and the remaining useful life of rolling element bearings. Therefore, spall size estimation is of great importance to bearing performance degradation assessment and life prediction [
9]. If the spall size can be promptly tracked, it is greatly helpful for ensuring correct maintenance decisions and preventing unexpected downtime [
10].
For the moment, the spall size estimation approach is generally based on acoustic emission signal [
2,
9,
11], or vibration signal [
6,
10,
12,
13,
14]. Kang et al. [
2] introduced a 2-D visualization tool that represents the percentage of the Gaussian-mixture-model-based residual component-to-defect component ratios via time-varying and multi-resolution envelope analysis, then distinguished the different crack sizes based on the k-NN classifier, but the specific fault size was not estimated. Ming et al. [
9] used an averaged dual-impulse interval determining method to evaluate the spall size by calculating the autocorrelation function of the squared envelope. Al-Ghamd et al. [
11] used the burst duration in acoustic emission signals to estimate the spall size. Sawalhi et al. [
6] used cepstrum analysis to give an average estimate of the spacing between the entry and impact events. Zhao et al. [
10] used the approximate entropy method and empirical mode decomposition to extract the times of the entry and exit events. Cui et al. [
12] used the vertical–horizontal synchronized root mean square to distinguish different fault sizes. Ahmadi et al. [
13,
14] estimated the defect size by measuring the distance between the entry and impact events. Most of the above approaches implement fault size estimation by determining the interval between two events caused by the same spall.
A common drawback of the above approaches is that they are not suitable for applications in some special and harsh environments which have external vibration or noise interference. In these cases, current signals are preferable as they are immune to external environmental interference. However, the two events caused by the spall are modulated in the alternating current, and are scarcely possible to distinguished in the time domain using the above approaches. Therefore, spall size estimation based on current has not been mentioned until now.
A novel idea which tracks the two events in the frequency domain is proposed in the present work. To address this issue, the feature transmission route from spall, to Hertzian forces, to friction torque, and then to current, is investigated detailedly. Then, the relation between the spall size and the sidebands modulated in current is revealed. However, identifying those sidebands modulated in current is consistently very tricky.
The complex signal transmission route from bearing defect to stator current poses higher impedance and hence results in lower signal-to-noise ratio (SNR) [
15]. The amplitude of the torque ripple is very small for real defects; the coefficient between the torque ripple and the current modulation is a damping coefficient [
3]. The modulation index is largely less than one [
16]. Owing to the poor SNR, the detection and diagnosis of bearings faults by using current signal is still challenging [
7].
Furthermore, the current of a typical induction motor involves dominant components such as the supply fundamental and its multiple harmonics, the eccentricity, slot, and saturation harmonics, etc. [
17]. For the defect signatures, the dominant components in current are not related to bearing defects, which are usually considered as noise. The suppression of strong noise is then another problem to be solved.
Therefore, highlighting fault features (enhancing SNR) or noise suppression are always a research focus, whether in current or in other signals. Noise suppression in current-based bearing fault diagnosis is focused on elimination of the fundamental supply frequency and its harmonics. To address this problem, some effective approaches are proposed based on notch filters [
18], the noise cancellation method using time shifting [
17], and the Teager-Kaiser energy operator [
16], etc. However, as the power supply frequency is the carrier of defect signatures, excessive noise suppression is not always the most reasonable option. Instead, a simple and effective approach of noise suppression is the squared envelope of signal based on Hilbert transform. The squared envelope of signal retains all the necessary diagnostic information [
16], and partly suppresses the power supply frequency and its harmonics. Till now, the squared envelope of signal has been applied successfully in preprocessing of current and other signals [
3,
17,
19,
20,
21].
Focusing on the poor SNR, some effective approaches to highlighting fault features in current have been proposed based on space vector [
3], Park’s vector [
22], etc. Unlike the above conventional strategies, this paper attempts to highlight fault features based on motor operation under reduced voltage frequency ratio.
Finally, a simple and feasible spall size estimation approach by tracking multiple vibration frequencies in current is introduced. The proposed approach only needs to calculate the squared envelope spectrum, an algorithm which is very simple, mature and widely used in various fields. Therefore, the proposed approach is easy to implement for existing inverter-driven induction motors without complicated calculation and additional sensors, immune to external disturbances, and suitable for harsh conditions.
Two major contributions have been made in this work. First, the relation between the spall size and the sidebands modulated in the current is revealed based on the simulation results for a spall model and a dynamic model of bearings; then, a novel idea which estimates the spall size by tracking the current sidebands is introduced. Second, this work introduces a fault-feature-highlighting approach based on reduced voltage frequency ratio, which is more effective than the traditional approaches.
This work is organized as follows. In
Section 2, the fluctuation of friction torque caused by spall, the relation between spall size and multiple characteristic vibration frequencies, and the multiple characteristic vibration frequencies modulated in current, are investigated. In
Section 3, the fluctuation of friction torque is verified based on a customized measuring instrument, and the spall size estimation approach by tracking multiple vibration frequencies is verified based on experimental platform. Finally, the conclusions and remarks are given in
Section 4.
2. Theoretical Analysis
2.1. Elastic Deformation
For ball bearings, widely employed in induction motors, elastic deformation between raceways and balls produces a non-linear phenomenon between force and deformation, which is obtained by the Hertzian theory [
23]. The non-linear relation of load-deformation is given by
where
F is Hertzian contact force,
K is the load-deflection factor or constant for Hertzian contact elastic deformation,
δ is the radial deflection or contact deformation.
The load–deflection factor
K depends on the contact geometry. Total deflection between two raceways is the sum of the approaches between the rolling elements and each raceway.
K is given by [
24].
where
Ki is inner-raceway-to-ball contact stiffness, and
Ko is outer-raceway-to-ball contact stiffness.
The detailed formulas and parameters for
Ki and
Ko are introduced in the literature [
23,
24,
25]. The value of
K for an SKF 6206 bearing is 4.9582 × 107 N/m, according with to the value range proposed in [
25,
26,
27].
2.2. Spall Model of Bearings
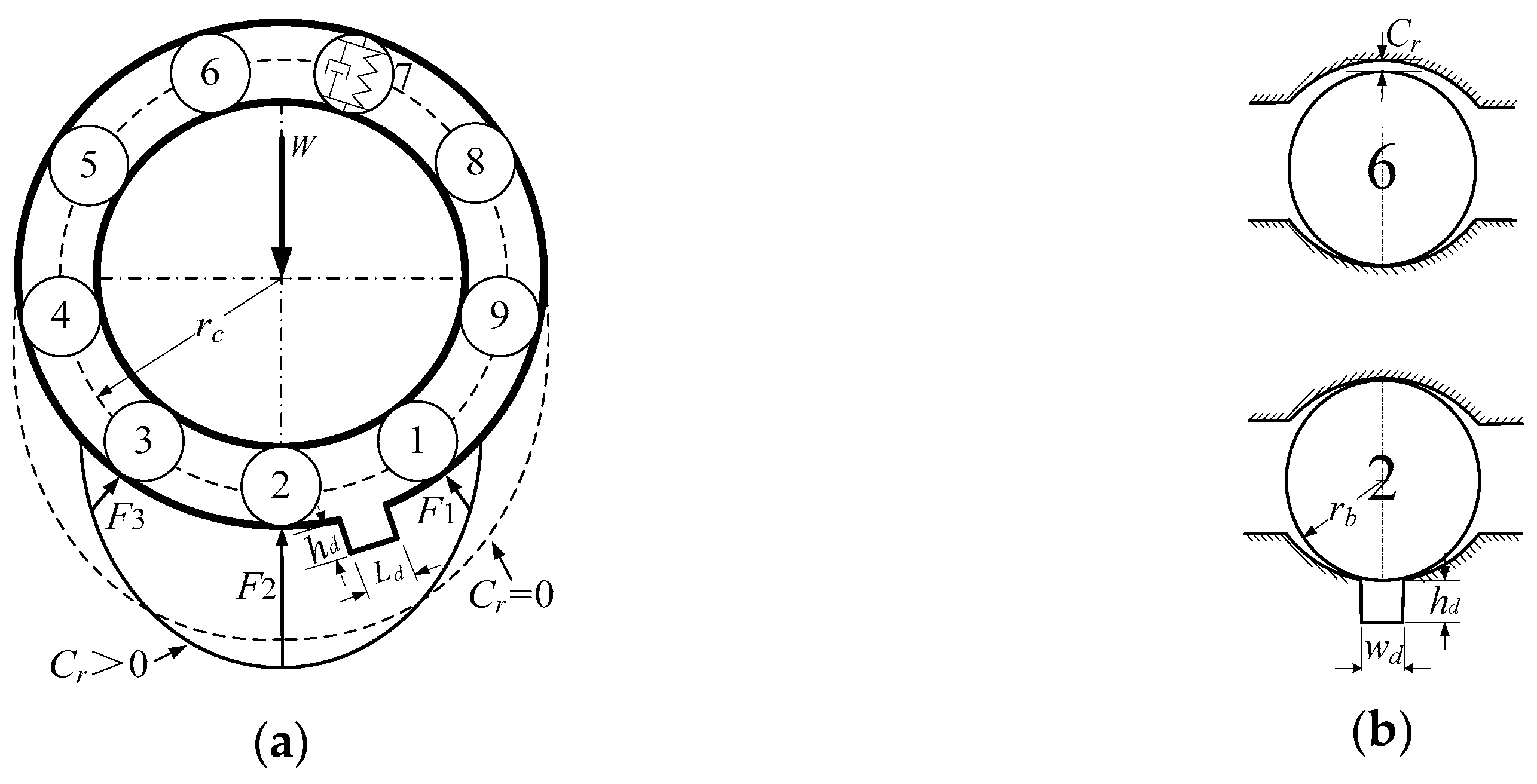
We considered the spall in the outer raceway as a rectangular notch of depth
hd with a width of
wd and a length of
Ld shown in
Figure 1. Take into account that the spall depth is generally larger than the radial deflection of outer raceways, and the spall width is also larger than the diameter of the contact deformation area between raceways and balls. Therefore, the spall size estimation in the present research focused on different spall lengths,
Ld.
The rolling element–raceway contact can be considered as a spring mass system, in which the outer race is fixed in a rigid support and the inner race is fixed rigidly with the motor shaft. In
Figure 1a, the 7th ball is shown as the symbol of spring mass, the other balls are only shown as a number for convenience.
Generally, ball bearings are designed with clearance
Cr for flexible and unblocked operation [
23]. On account of the effect of clearance
Cr, the number of balls providing rotor support varies. If
Cr = 0, there are five balls (4, 3, 2, 1, 9) providing rotor support as shown in
Figure 1a. If
Cr > 0, there are three balls (3, 2, 1) providing rotor support. For an SKF 6206 bearing, the clearance
Cr is generally about 5–20 μm. Therefore, the balls in the area between 5 o’clock and 7 o’clock principally provide rotor support; it is clear that the effect on the motor is most severe for the spall located in this support area.
Because the load–deflection factor K is very large, the contact deformation δ is correspondingly very small, and generally micrometer-scale. The contact deformation area between the ball and the race is very small; the rise and fall of contact force will be obvious even for a very small spall. When the 2nd ball rolls into the spall, the contact force F2 of the 2nd ball disappears, the centre of the inner race connected with the motor shaft falls, the contact force F1 and F3 subsequently rises, and the vibration is also produced at this moment.
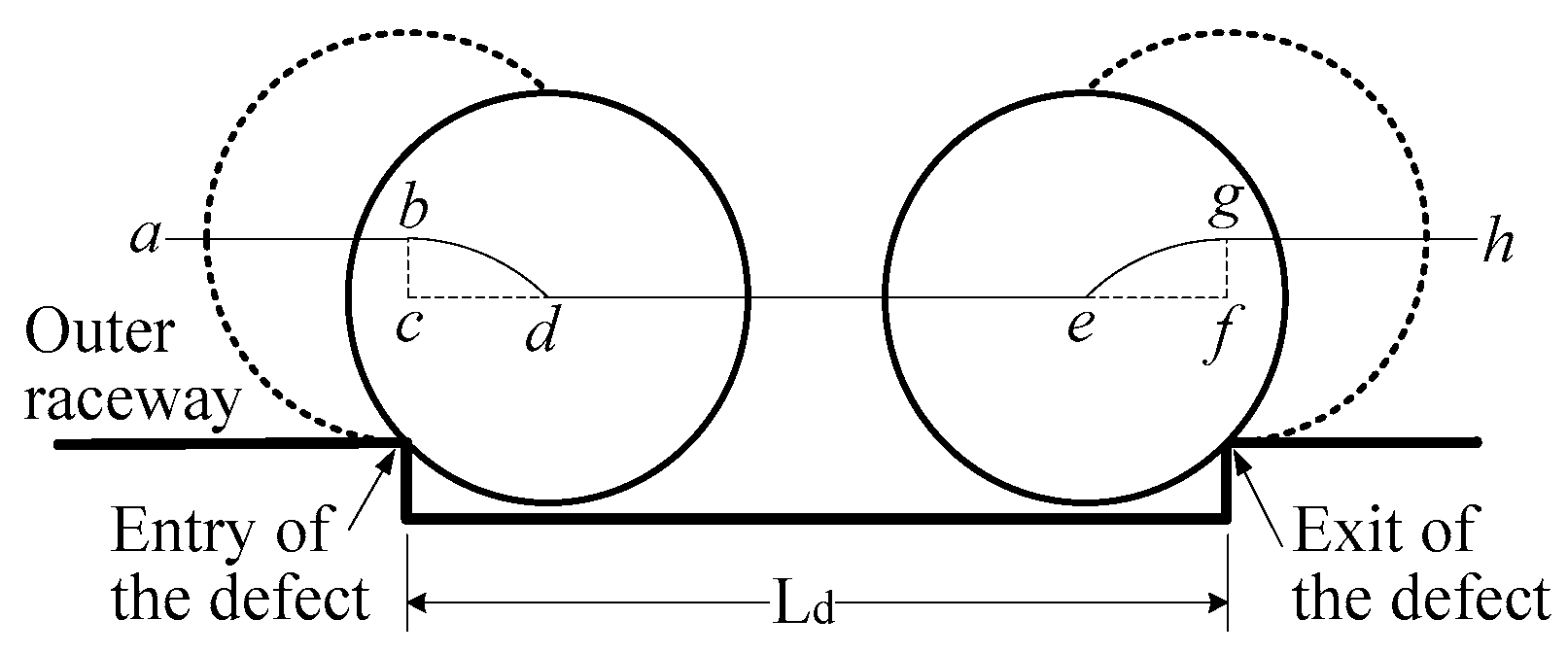
For further exploration of the effect of spall, a detailed rolling path is shown in
Figure 2.
Considering the balls as point masses is a common approach employed in numerous literatures [
24,
28,
29,
30], in which the contact force of the ball entirely disappears as soon as the centre of the ball enters into the entry of the spall. When the ball passes through the spall from the entry to the exit of the spall, the common rolling path of the centre of the ball is considered to be in a sequence of “
a-
b-
c-
d-
e-
f-
g-
h” as shown in
Figure 2. In reality, considering the size of the ball [
25,
31,
32,
33,
34], the rolling path of the centre of the ball is in a sequence of “
a-
b-
d-
e-
g-
h”. Till the “
d” point, the contact force of the ball just entirely disappears; beginning at the “
e” point, the contact force of the ball already arises.
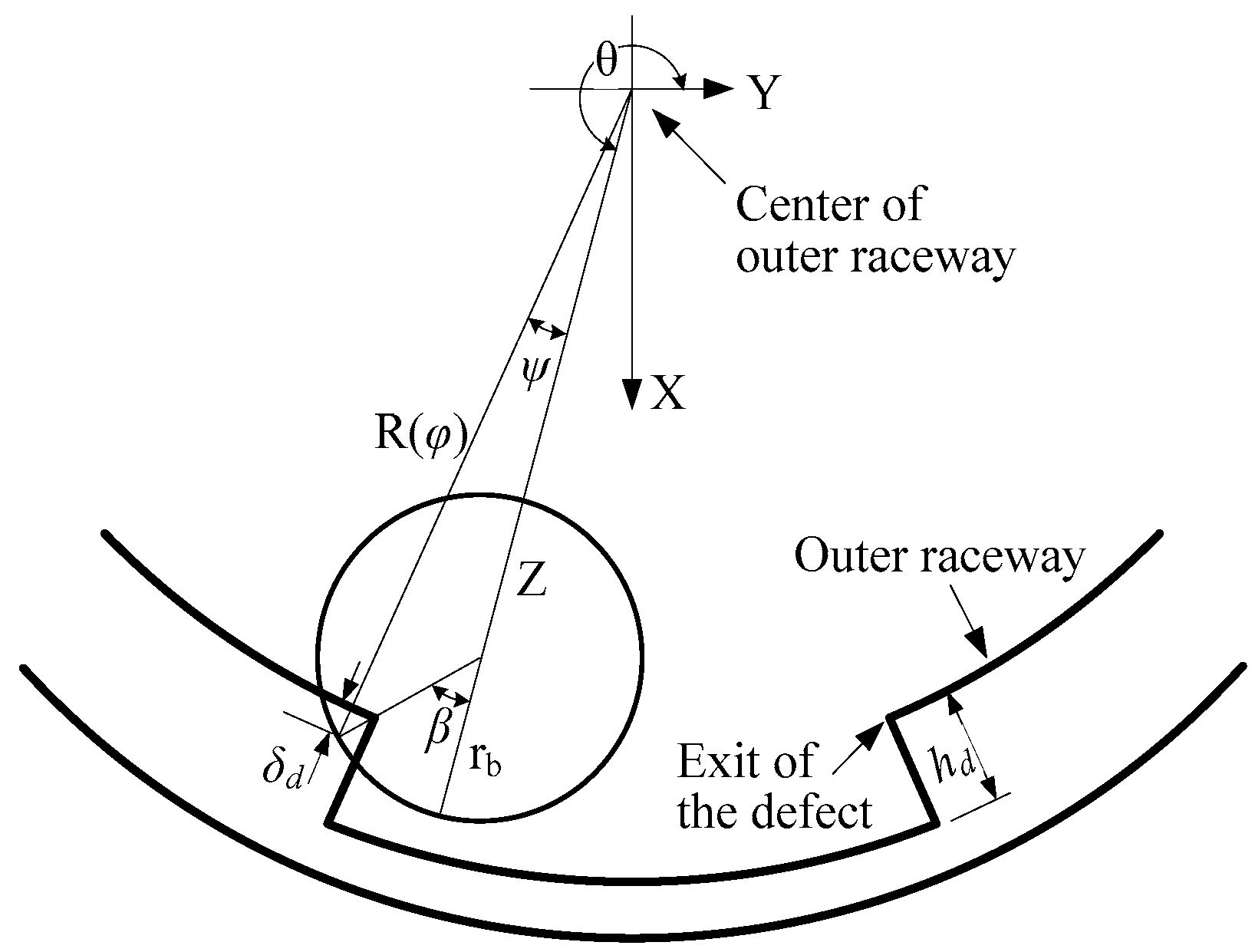
In order to estimate accurately the effect of spall, the present research adopted the spall model introduced by Alireza Moazen Ahmadi [
35], which reasonably considers the size of the ball. The schematic diagram of the ball passing the spall in the outer raceway is as shown in
Figure 3.
The spall in the outer raceway can be modeled as
where
θ is the angular position of the ball,
θen and
θex are the angular positions of the spall entry and exit, and
hd is the spall depth. The geometry function of the outer raceway is given by
where
rc is bearing pitch radius,
rb is the radius of the ball, and
Cr is the radial clearance of the bearing.
The contact deformation
δ is given by
where
Z is the distance of the ball from the centre of the outer raceway,
β is the angle between the maximum deformation point on the ball and Z based on the centre of the ball, and
ψ is the angle between the maximum deformation point on the ball and Z based on the centre of the outer raceway. The
ψ is given by
The contact deformation
δd between the entry and the exit of the spall is finally determined by
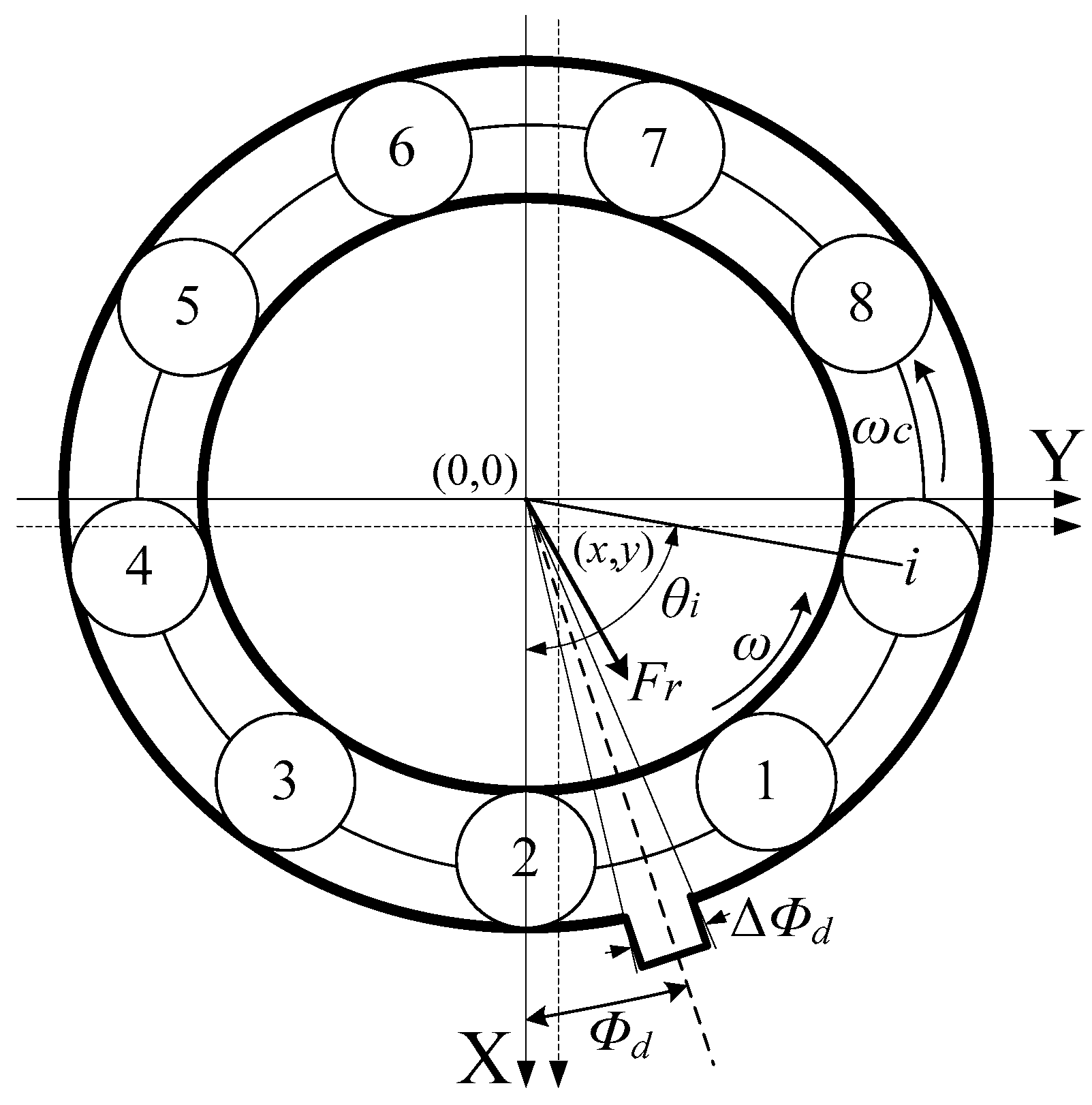
2.3. Dynamic Model of Bearings
Because the ball bearing primarily supports the radial forces, the dynamic model based on a two-degrees-of-freedom system is enough for analysing the defect feature transmission route from spall, to Hertzian forces, and then to friction torque. The two-degrees-of-freedom system is also employed widely in the majority of literature up to now [
24,
25,
28,
29,
30,
31,
32]. The dynamic model of bearings is shown in
Figure 4.
Φd is the angle from the X-axis to the centre of the spall, and Δ
Φd is the angle corresponding to the spall length
Ld. For convenience, Δ
Φd is directly regarded as the spall length in the following part.
If
x and
y are the deflections along the X-axis and the Y-axis, the radial deflection
δi of the
ith ball at any angle
θi is given by
The
Z in Equation (5) is given by
Based on Equation (1), resolving the total Hertzian forces along the X-axis and Y-axis:
where
N is the number of balls. Since the Hertzian contact force arises only when there is contact between the ball and the raceway, the respective contact force is set to zero when the contact deformation is equal or smaller than zero. This is indicated by subscript “+”.
θi is given by
where
ωc is the speed of the cage.
where
ω is the shaft speed.
Based on the structural dynamics theory, the equations of motion for a two-degrees-of-freedom system can be written as follows:
where
m is the mass of the rotor and of the inner race,
c is the damping factor, and
W is the static load. The damping factor
c is commonly chosen to be 200 Ns/m [
24,
25,
27,
28,
29].
2.4. Load Dependent Friction Torque
A reasonable estimate of the friction torque of a given rolling bearing under moderate load and speed conditions is the sum of load friction torque
M1 and viscous friction torque
Mv.
Mv is primarily dependent on speed and the method of lubrication [
23] and is independent of bearing load. Hence,
Mv isn’t going to be discussed because of its insensitivity to bearing defects in this paper.
The load dependent friction torque is given by
where
f1 is a factor dependent on the bearing design, and
Fβ depends on the magnitude and direction of the applied load. The detailed formulas and parameters for
f1 are introduced by literature [
23].
For ball bearings having a nominal contact angle 0°, there is not applied axial load, so Fβ equals the applied radial load Fr. For static equilibrium, the applied radial load must equal the sum of the Hertzian forces from each of the balls.
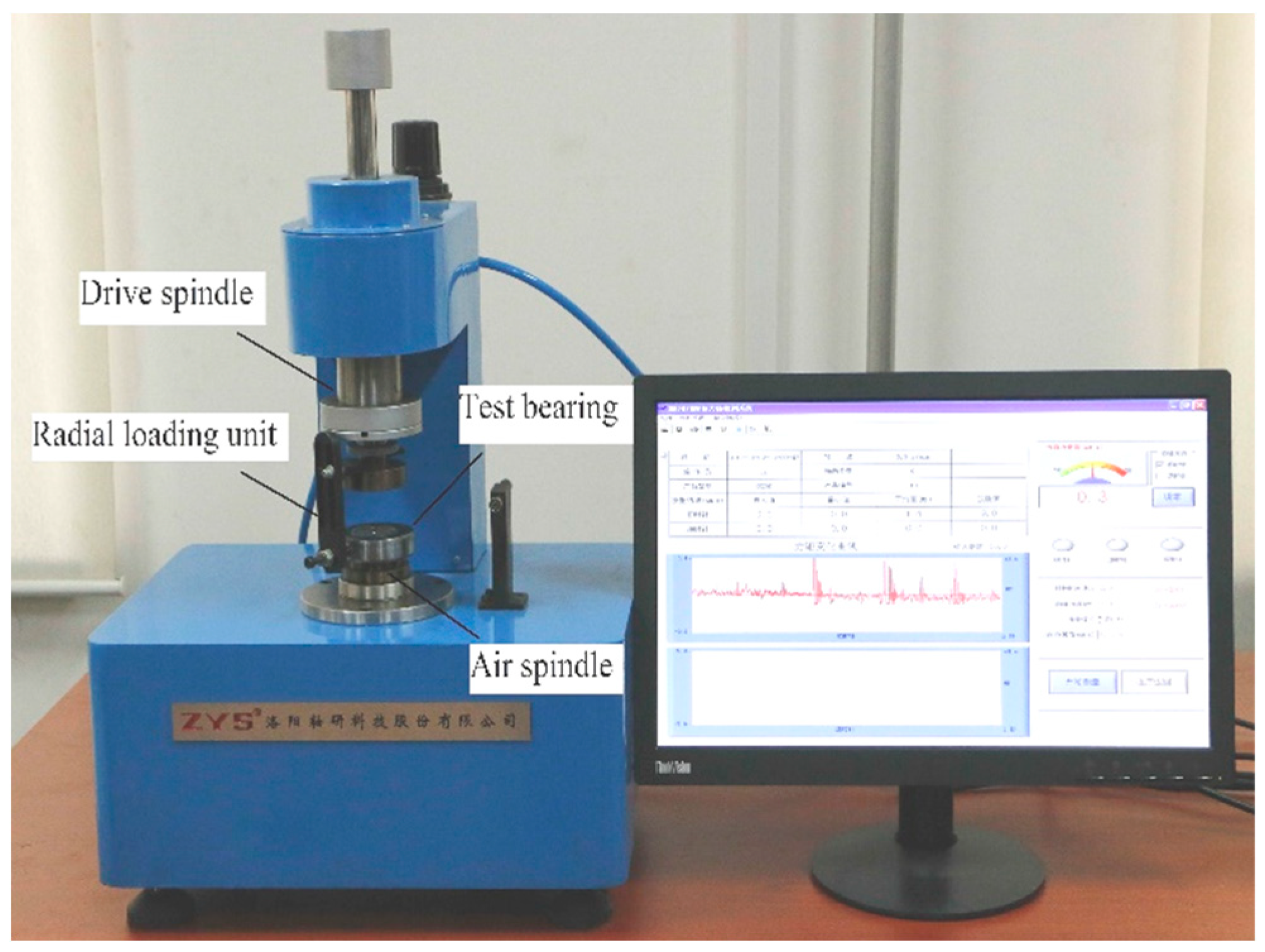
2.5. Simulated Hertzian Forces and Friction Torque
The spall model and dynamic model of the bearing were solved in MATLAB using the ordinary differential equation solver (ode45). For the defective SKF 6206 bearing in a 2.2 kW induction motor, the parameters of the spall model and dynamic model of the bearing are given in
Table 1.
In
Table 1, the number of balls
N, ball radius
rb, pitch radius
rc, radial clearance
Cr and load-deflection factor
K are parameters related to the SKF 6206 bearing. The defect depth
hd, angle of the defect centre
Φd and angle of the defect length Δ
Φd are parameters related to the assumed spall in bearing outer raceway. The mass of the rotor
m and static load
W are parameters related to the 2.2 kW induction motor, and the
W is equal to
m times gravity acceleration. For the bearing SKF 6206 mounted in the motor, the damping factor
c is commonly chosen to be 200 Ns/m. The motor speed
n and shaft speed
ω are parameters related to the motor operation, and
ω = 2πn/60.
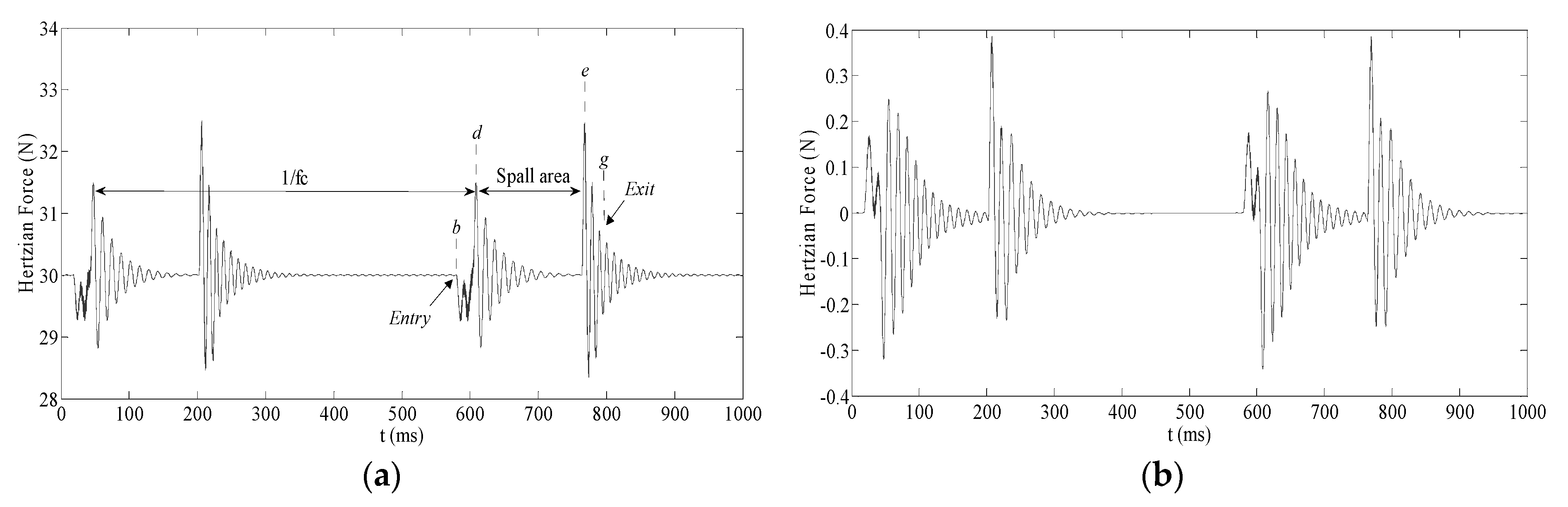
The total Hertzian forces along the X-axis and Y-axis are as shown in
Figure 5.
In
Figure 5, because
Φd is 0°, which means that the spall is just located in the 6 o’clock region, the X-axis total Hertzian forces
FX is much larger than the
FY, which will be ignored in following discussion.
Whether in
FX or in
FY, the cycle of the Hertzian forces caused by the spall exactly corresponds to the characteristic vibration frequencies
fc, which are given by:
where
fr is the mechanical rotor frequency,
N is the number of balls,
Db is the diameter of the ball,
Dc is bearing pitch diameter, and
α is the contact angle between the ball and the raceway.
Except for
fc, the information about spall size is also revealed distinctly in
Figure 5. There are two impulse responses, respectively located at the entry and exit of the spall. The spall size corresponds to the primary interval between “d” and “e”, the additional interval between “b” and “d”, and the additional interval between “e” and “g”. The primary interval is easy to determine based on
Figure 5. The latter two additional intervals are not very distinct, but can be estimated by size of the ball.
Through different pathways, two impulse responses caused by the entry and exit of the spall can also be propagated to the vibration signal and the acoustic emission signal. Then, spall size estimation can be implemented by determining the average interval between two events [
2,
6,
9,
10,
11,
12,
13,
14].
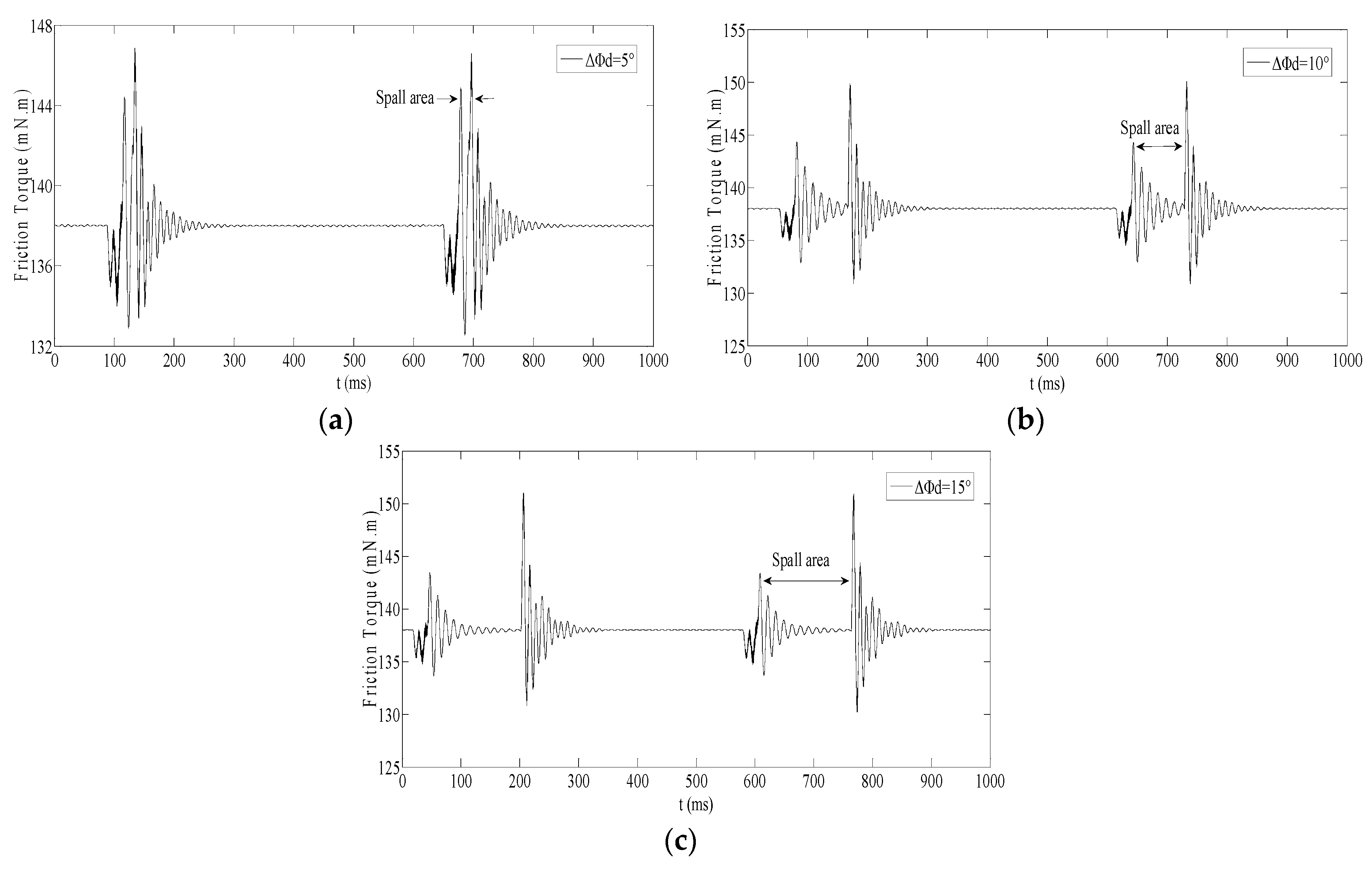
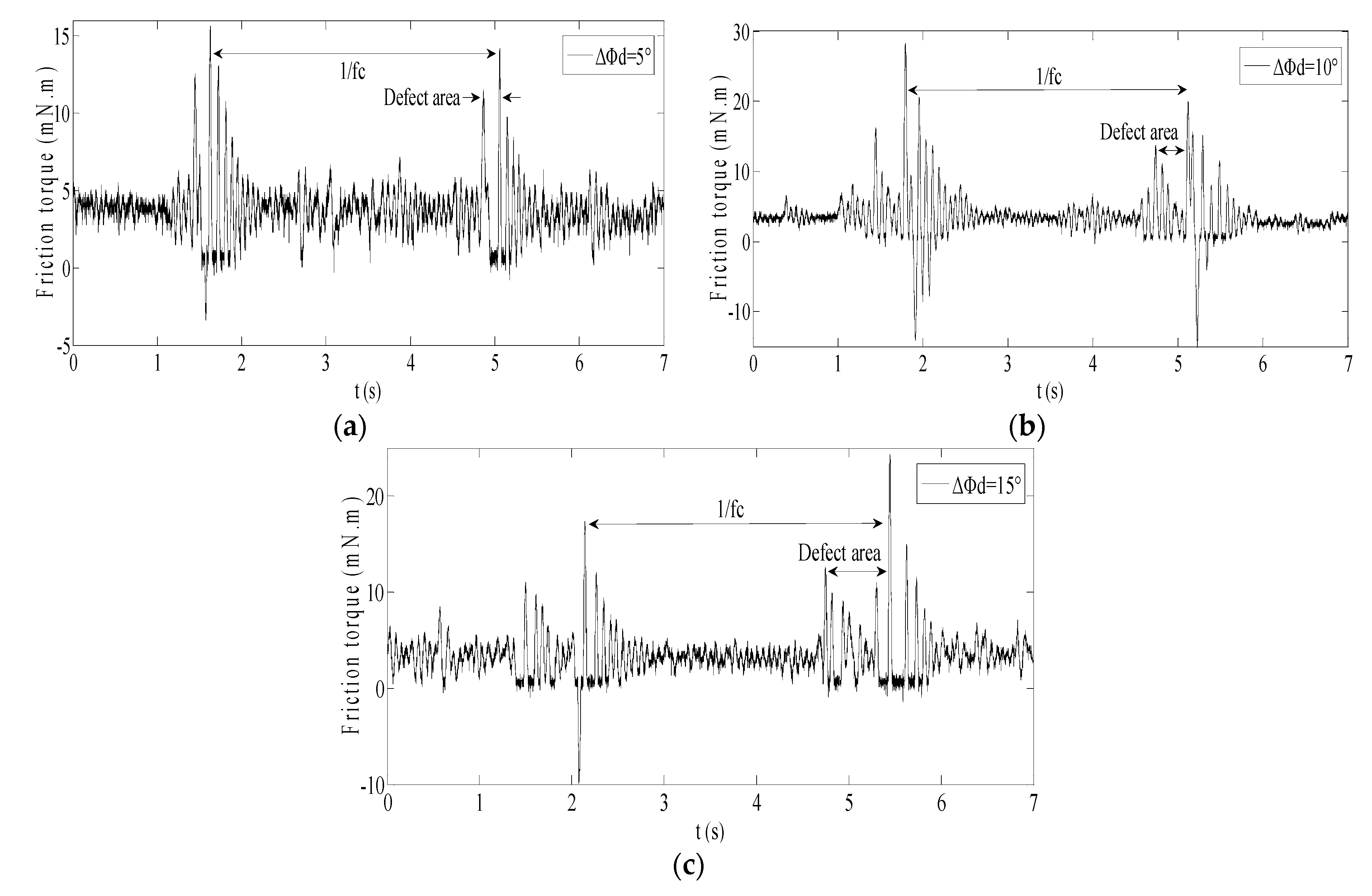
Whereafter, the Δ
Φd is set as 5°, 10° and 15° respectively in
Table 1; the friction torques are as shown in
Figure 6.
In
Figure 6, the two impulse responses caused by the two events exhibit consistent in friction torque for different spall lengths, but the amplitude of the friction torque is very small. For spall size estimation based on current, not only the friction torque will be buried, likely in load torque, but also the friction torque modulated in current will be faced with strong noise which will include the power supply frequency and its harmonic. All this means that spall size estimation based on current is scarcely possible by determining the average interval in the time series. As an alternative, in the frequency domain, tracking the frequency feature of the friction torque modulated in current will be a feasible solution.
Unlike a single-point defect, which only produces a single characteristic vibration frequency, the spall including two impulse responses will produce multiple characteristic vibration frequencies. Therefore, the relation between spall length and the multiple characteristic vibration frequencies in friction torque must be investigated first.
2.6. The Relation Between Spall Size and Multiple Characteristic Vibration Frequencies
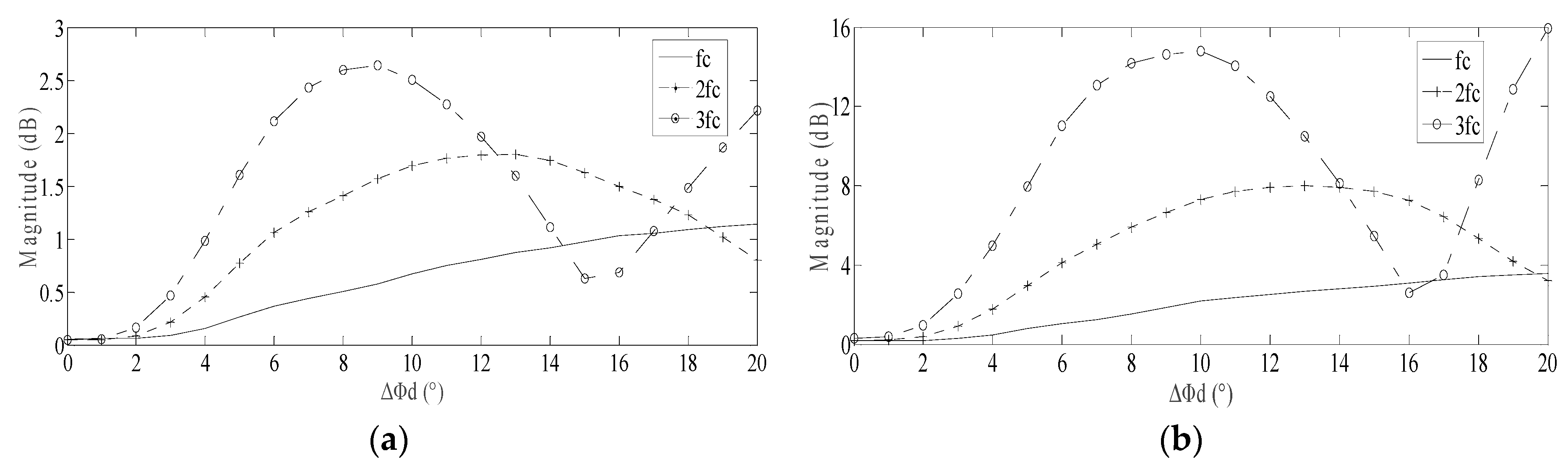
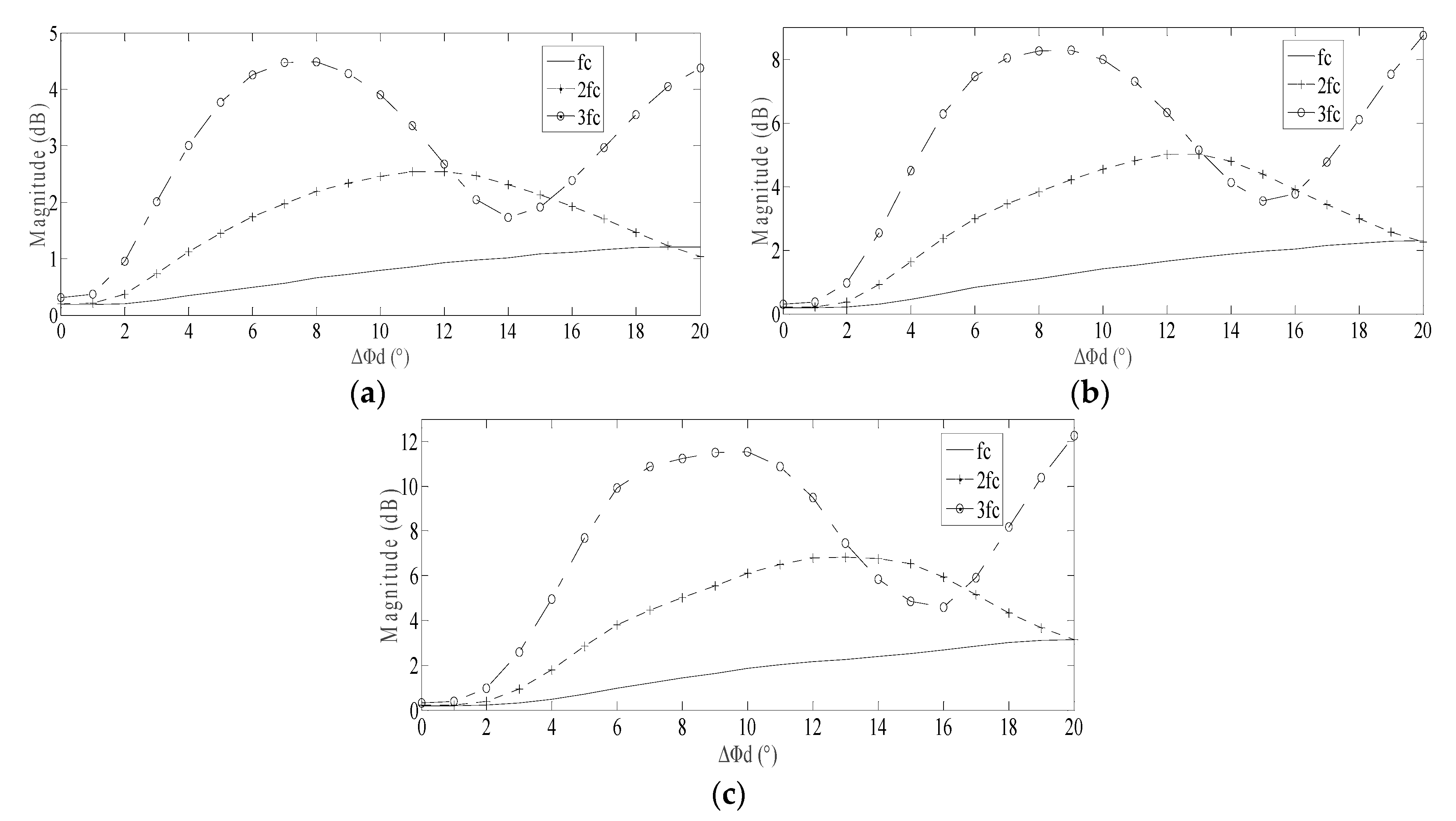
For constant spall depth hd = 100 μm, Changing the ΔΦd from 1° to 20° with a distance of 1°, the friction torque was respectively solved. For each friction torque, the amplitudes of 1st~3rd multiple characteristic vibration frequencies fc, 2fc and 3fc were achieved based on Fast Fourier Transform (FFT) in MATLAB. Only the fc, 2fc and 3fc frequencies are analyzed in this paper because of the sufficient spall length information carried by these three frequencies, even though other, higher, multiple-characteristic vibration frequencies are also present.
When the motor speed was set as 150, 300 and 450 r/min respectively, the amplitude trend of
fc, 2
fc and 3
fc in friction torque for various spall length were as shown in
Figure 7.
In
Figure 7, following the increase of the spall length, the fluctuation of amplitude of 2
fc and 3
fc are more obvious than
fc. When Δ
Φd reached a certain level (10° when motor speed is 300r/min shown in
Figure 7b), the amplitude of 3
fc reached its maximum. When the Δ
Φd further increased (15°–16°), the amplitude of 3
fc reduced to the minimum; in the meantime, the amplitude of 2
fc reached its maximum. The regular rise and fall of amplitude of 2
fc and 3
fc was consistent for different motor speeds. When the motor speed is slower, the amplitude trend collectively shifts left, as shown in
Figure 7a. When the motor speed is higher, the amplitude trend collectively shifts right, as shown in
Figure 7c.
Following an increase in the motor speed, the amplitudes of fc, 2fc and 3fc all increase. Theoretically, increased motor speed is possibly beneficial for identifying those spall-related characteristic frequencies in stator current.
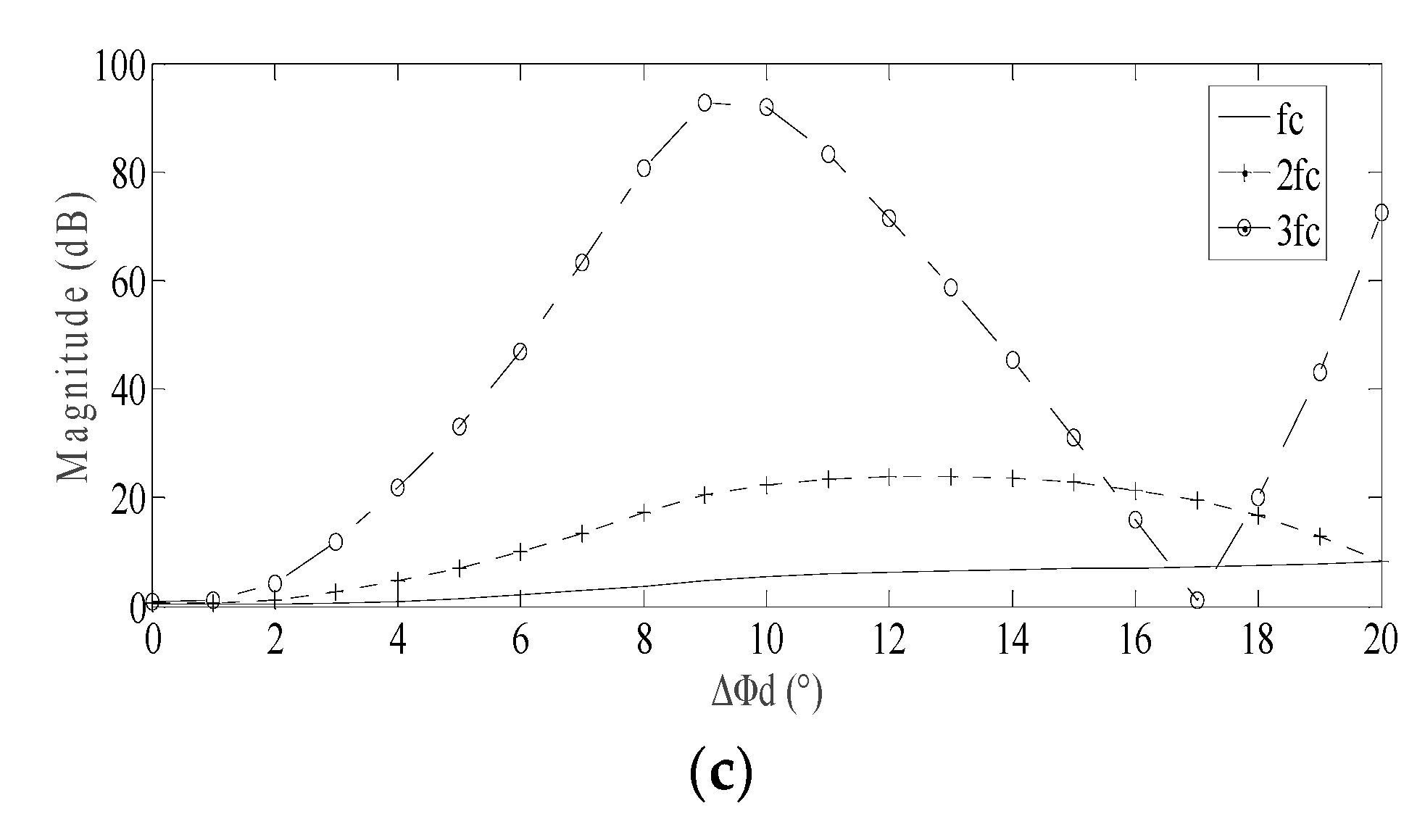
In order to verify that the regular rise and fall of amplitude of 2
fc and 3
fc is universal for other cases, the various spall depth is also discussed. When the motor speed was set as 300 r/min, for three spall depths
hd = 20, 40 and 60 μm respectively, the amplitude trends of
fc, 2
fc and 3
fc were as shown in
Figure 8.
In
Figure 8, for different spall depths, the regular rise and fall of amplitude of 2
fc and 3
fc is still subsistent. In addition, following an increase in the spall depth, the amplitudes of
fc, 2
fc and 3
fc just increase a little. That is to say, the amplitude of the multiple characteristic vibration frequencies is not very sensitive for spall depth.
Based on termly observation of current during the motor operation, the spall length may be estimated approximately by tracking the regular rise and fall of amplitude of 2fc and 3fc. The estimation of spall length will be sufficient evidence for the correct maintenance decision and a reasonable maintenance schedule for the induction motor.
2.7. The Multiple Characteristic Vibration Frequencies Modulated in Current
The friction torque is transmitted to the stator current by means of nonlinear phase modulation, which, even though a single frequency, can also be evolved into a chain of frequencies in current. If there are spectrum overlaps among the multiple characteristic vibration frequencies modulated in the current, spall size estimation based on the regular rise and fall of amplitude of 2fc and 3fc will be imprecise. Therefore, the multiple characteristic vibration frequencies modulated in current will be investigated.
Only taking account of the effect of
fc, 2
fc and 3
fc, which are the primary parts of fluctuant friction torque caused by spall, the total load torque
Τl can be described as follows:
where
Τ0 is the constant torque,
n is a positive integer,
ωc is the characteristic vibration angular frequency and
Τn is the amplitude of
nωc.
Based on the same method introduced in [
36], the stator current is given by
where
ωs is the electrical supply angular frequency,
βn is the modulation index of the
nth multiple characteristic vibration angular frequency
nωc, and
βn is given by
where
p is the pole pairs and
J is the total inertia of the rotating system. Following an increase of
n,
βn will decrease.
After modulating in current, the amplitude of 2
fc will be less than that shown in
Figure 7; the amplitude of 3
fc will also be lesser, but the regular rise and fall is unaltered. For this reason, those other higher order multiple characteristic vibration frequencies are not taken into account, because those modulated in current are scarcely possible to identify.
Equation (17) can be expanded on the basis of the first-kind Bessel function
where the symbol “Im” represents taking the imaginary part,
m is an integer, and
Jm(
βn) is the
mth Bessel function for
βn.
For
n=1, 2, and 3, Equation (19) can be simplified as
where
a,
b, and
c are integers, and similar to
m in (19).
Ja(
β1) is the
ath Bessel function for
β1,
Jb(
β2) is the
bth Bessel function for
β2, and
Jc(
β3) is the
cth Bessel function for
β3.
Letting
k =
a + 2
b + 3
c, then, the bearing fault-related frequency
fbf in stator current is given by
where
fs is the power supply frequency;
fs ±
kfc is commonly called the
kth sideband in phase modulation.
Equation (21) is same as the proposed result in the majority of literature, but the difference is that the amplitude of side frequencies in current can be revealed using Equation (20).
For the general formula of
Ja(
β1),
Jb(
β2), and
Jc(
β3),
Jm(
βn) can be expressed as
Considering that
equation (22) can be rewritten as
Considering that the magnitude of
βn is extremely small (less than 0.1) [
3,
16,
36], only
k = 0 deserves attention. This therefore leads to
Equation (25) can be directly rewritten as
In addition, the symmetry of the Bessel function is shown, as J-m(βn) = −Jm(βn) when m is odd, and J-m(βn) = Jm(βn) when m is even.
Focusing on the amplitude of the first sideband fs+fc, k=1, that is, a+2b+3c=1. There are innumerable solutions for a, b, and c.
Based on Equation (26) and the symmetry of the Bessel function, only 0, 1 or −1 is a significant value for a, b, and c. For a + 2b + 3c = 1, there are three significant solutions: a = 1, b = 0, c = 0; a = −1, b = 1, c = 0; or a = 0, b = −1, c = 1. These solutions are put into Equation (20), then, the amplitude of fs+fc is presented as I1J1(β1)J0(β2)J0(β3) −I1J1(β1)J1(β2)J0(β3) −I1J0(β1)J1(β2)J1(β3). Based on Equation (26), the amplitude of fs + fc can be further simplified as 0.5I1β1−0.25I1β1β2−0.25I1β2β3.
Considering that βn is extremely small, the magnitudes of 0.25I1β1β2 and 0.25I1β2β3 are much smaller than the magnitude of 0.5I1β1, and are ignorable. The amplitude of fs + fc is close to 0.5I1β1.
In the same way, the amplitude of other sidebands can be calculated. The final conclusion is that the amplitude of fs ± fc is 0.5I1β1; the amplitude of fs ± 2fc is 0.5I1β2; the amplitude of fs ± 3fc is 0.5I1β3.
This conclusion means that, after transmitting to current, the spall size information implied in the 1st~3rd multiple characteristic vibration frequencies presents perfectly in the current without spectrum overlap. In brief, the amplitude of fs ± 2fc is overwhelmingly contributed by the 2nd multiple characteristic vibration frequencies, 2fc, and is unaffected by the other multiple characteristic vibration frequencies. The condition of fs ± fc and fs ± 3fc is similar to that of fs ± 2fc.
In theory, spall size estimation based on current can be implemented by tracking the regular rise and fall of amplitude of multiple characteristic vibration frequencies modulated in current.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}