Automotive 3.0 µm Pixel High Dynamic Range Sensor with LED Flicker Mitigation

Abstract
:1. Introduction
2. High Dynamic Range Sensor with LED Flicker Mitigation
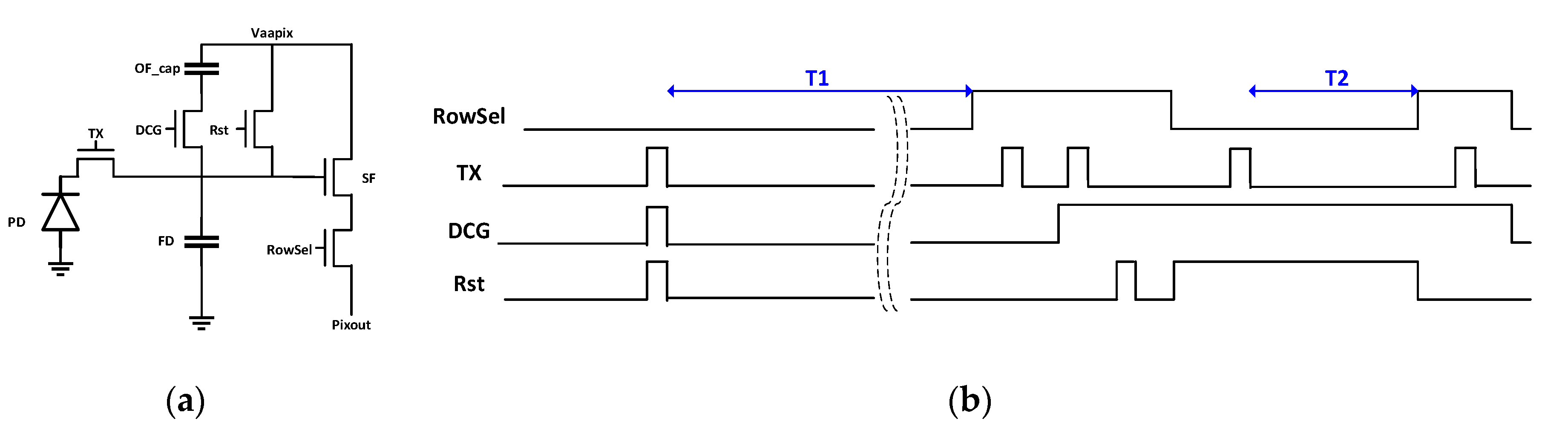
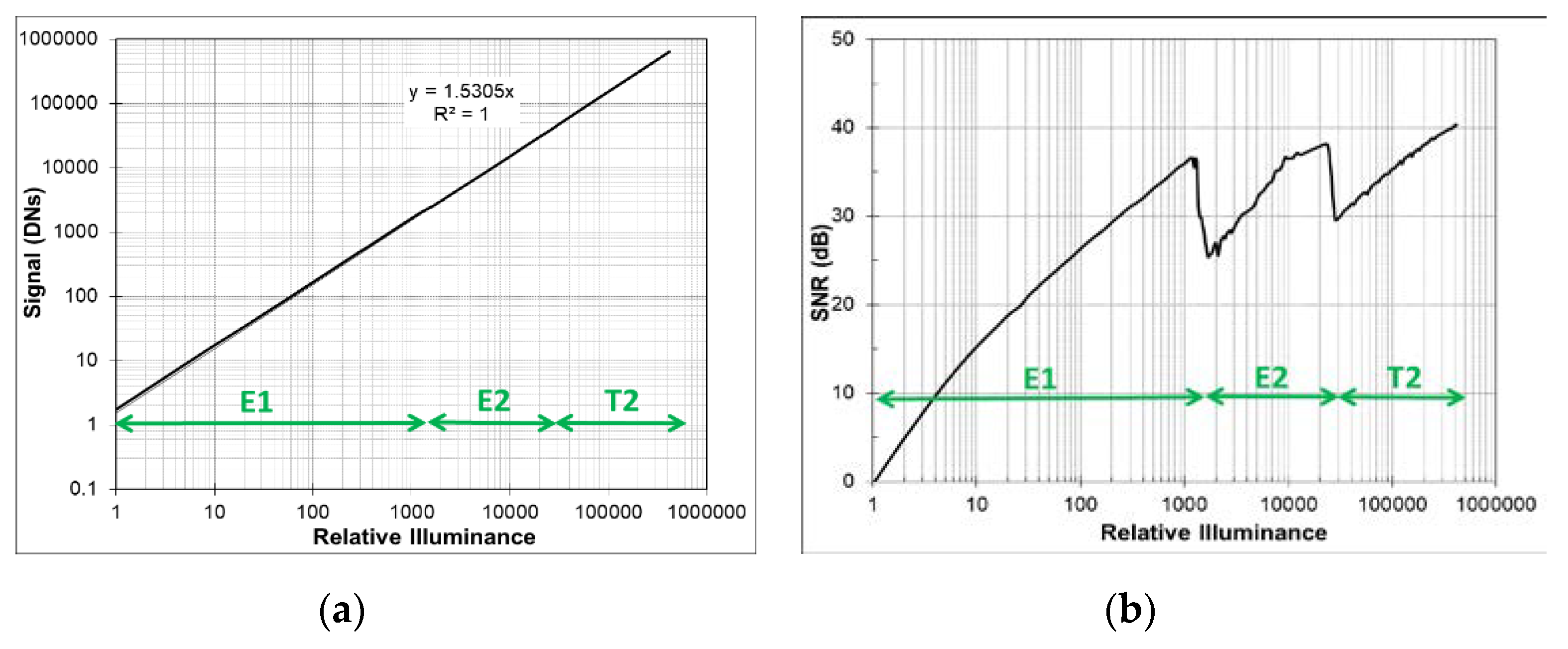
2.1. Pixel Description and SNR Results
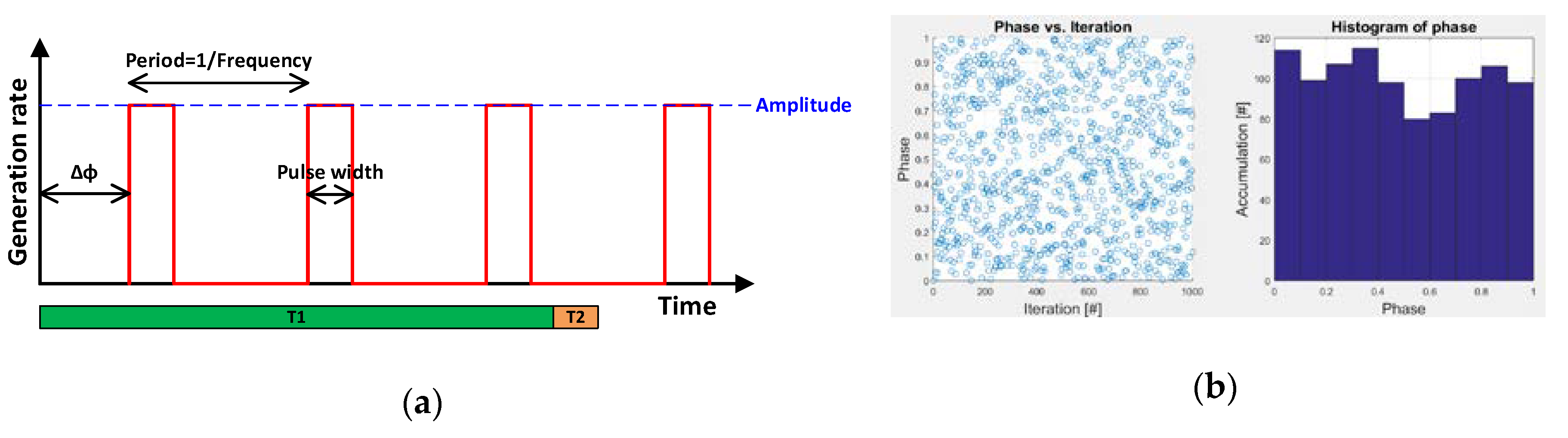
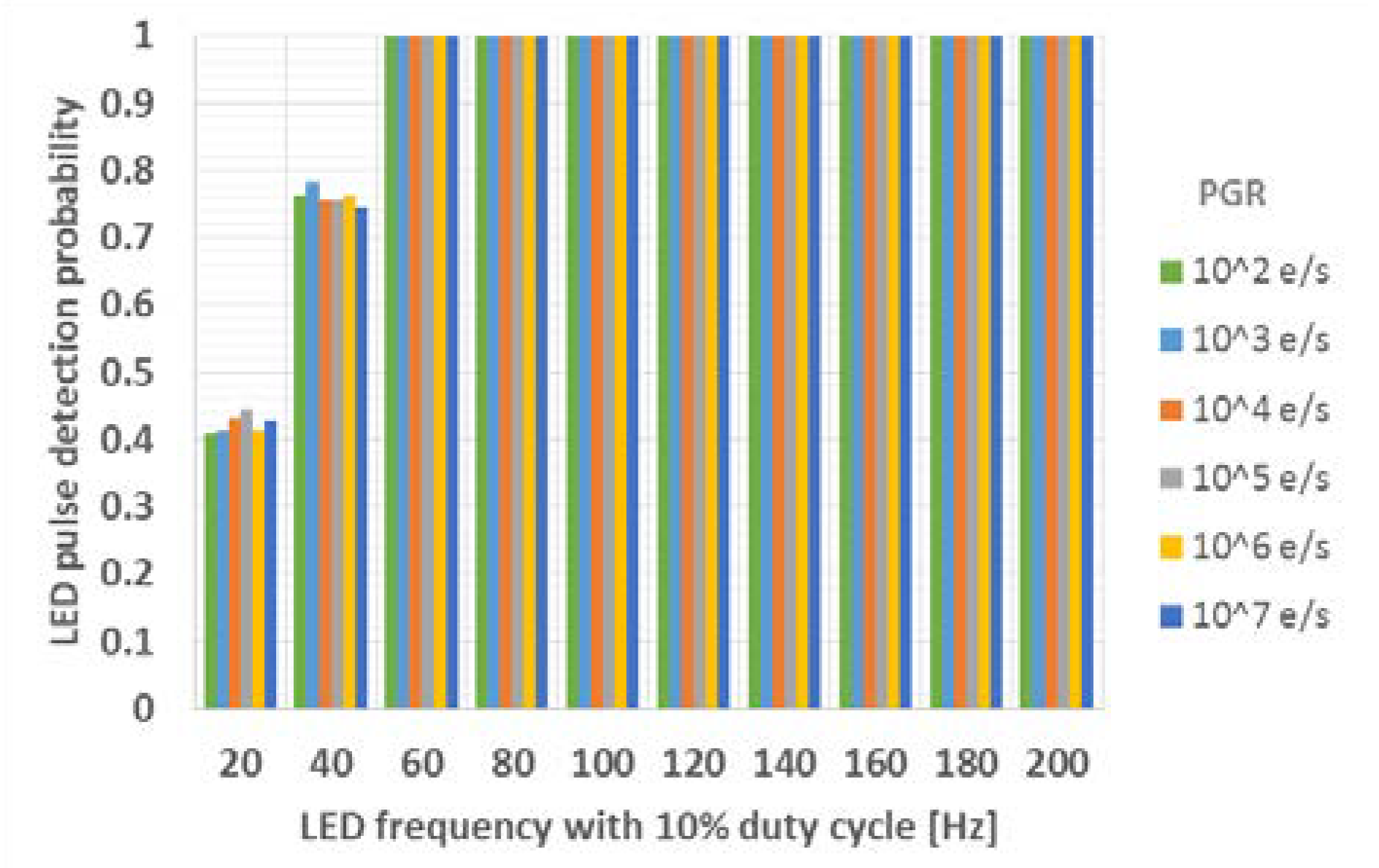
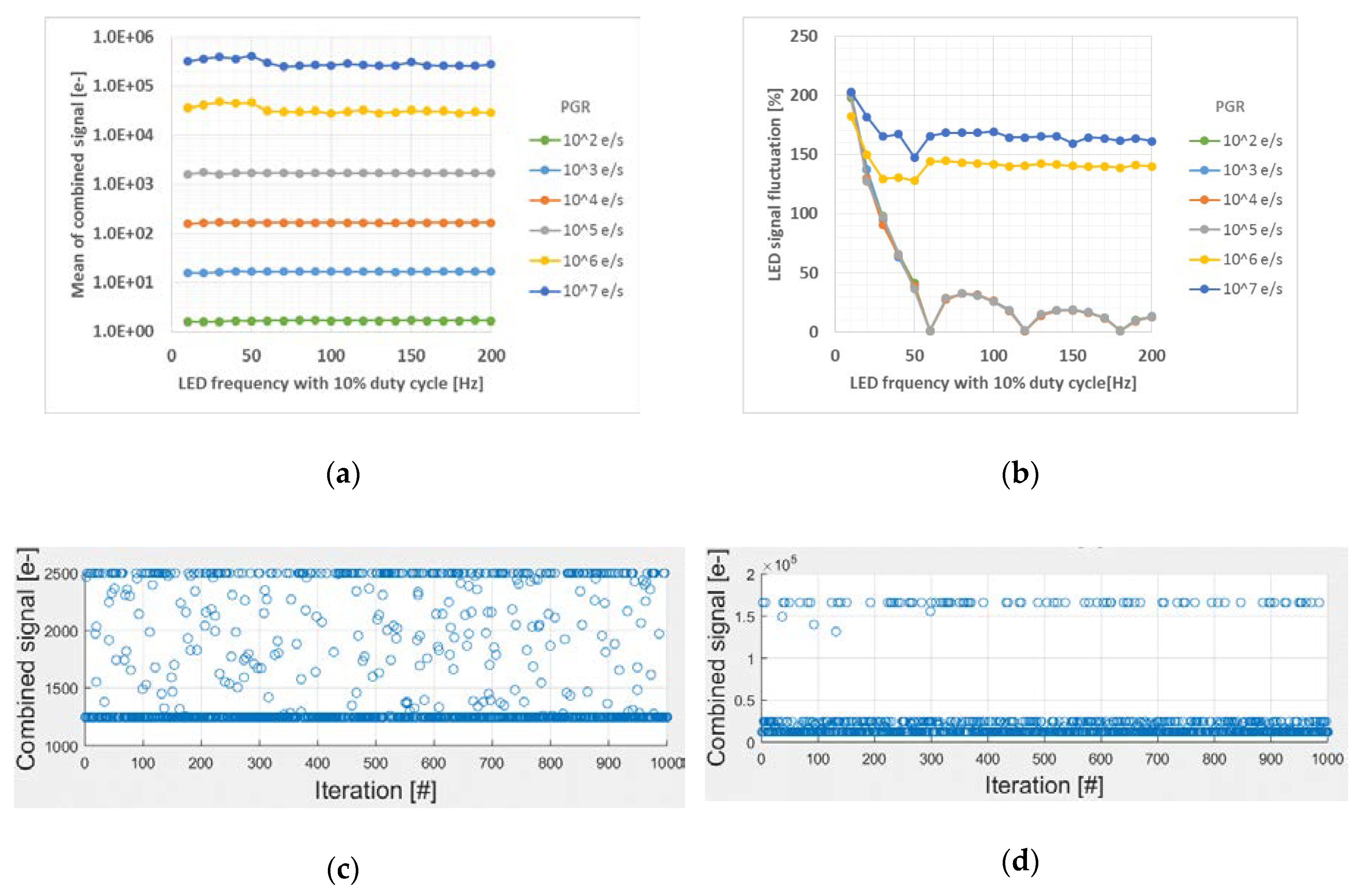
2.2. Monte Carlo Simulation for LED Detection Probability and Signal Modulation
2.3. Measured Sensor Parameters
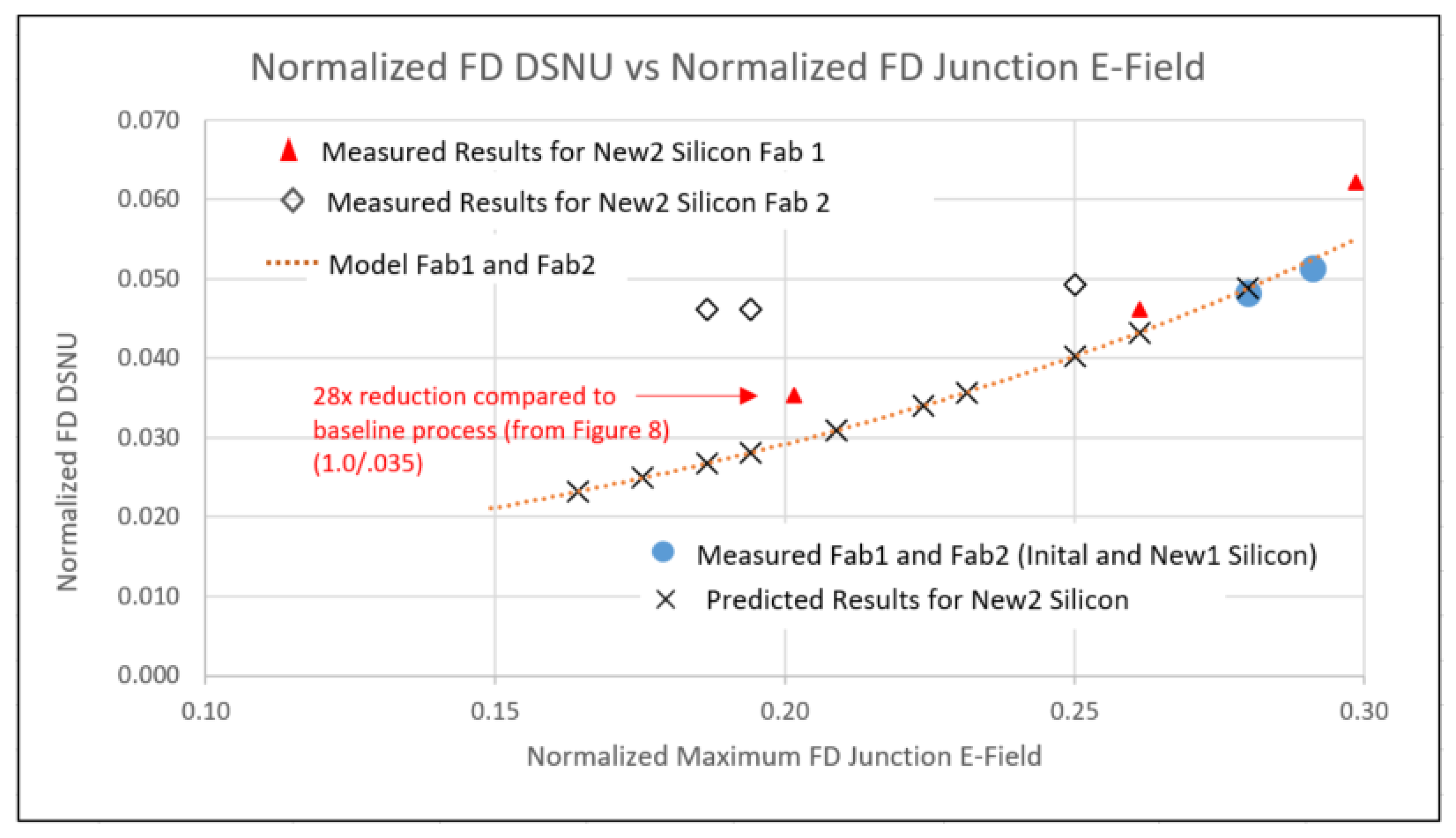
3. FD Dark Current (DC) and Dark Signal Non-Uniformity (DSNU) Reduction for Improved SNR
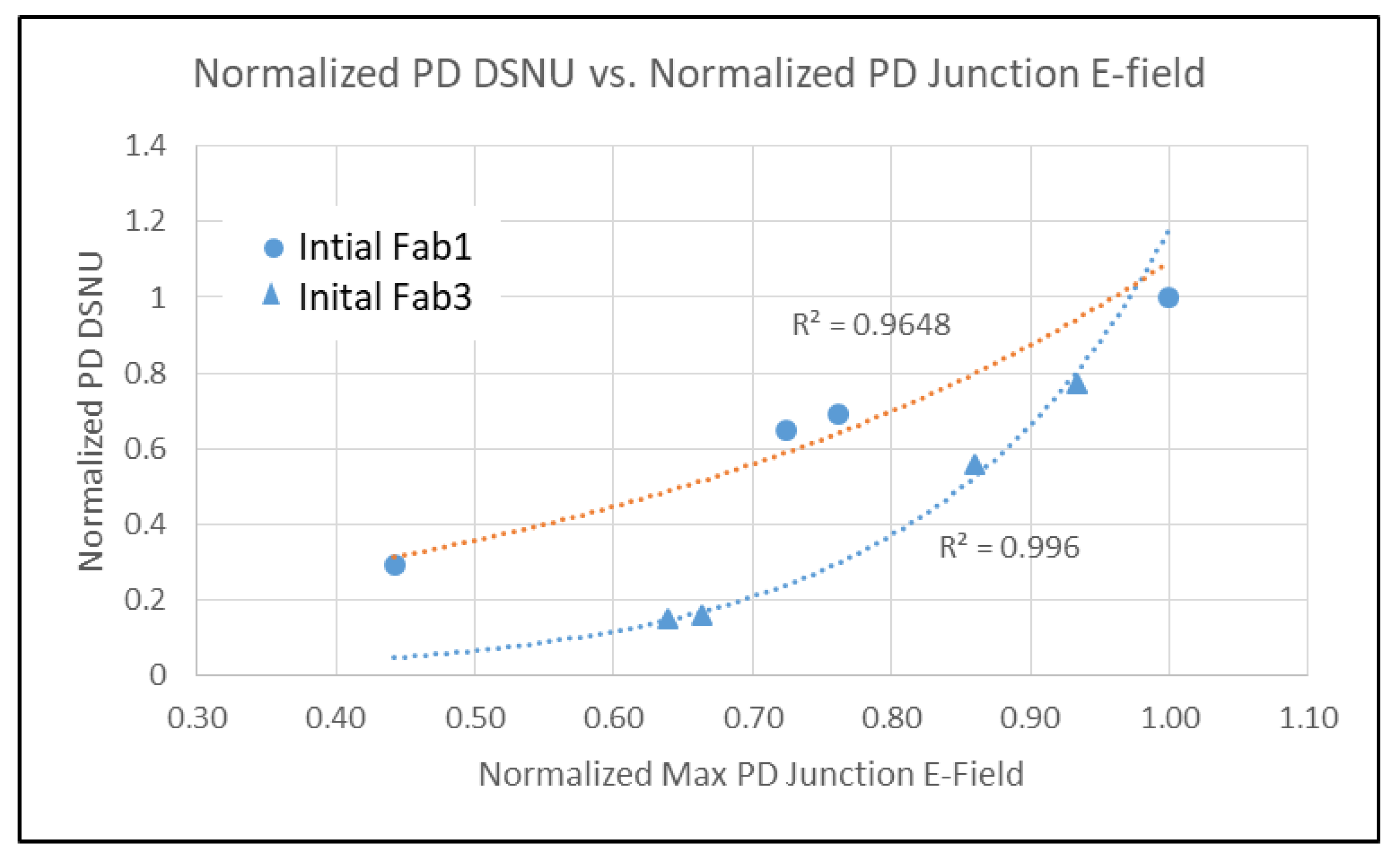
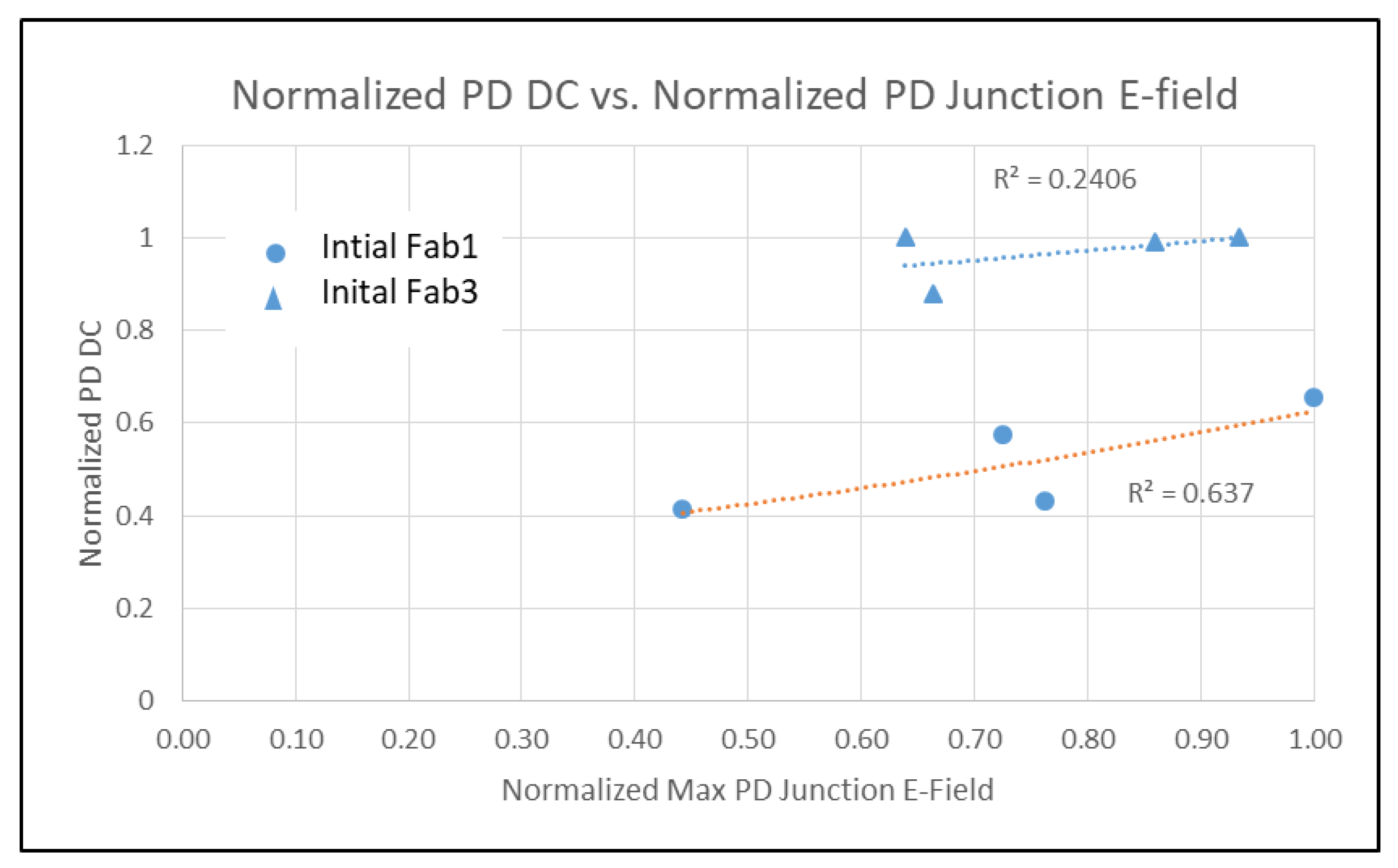
3.1. DC and DSNU Initial Data and Analysis
3.2. New Process Modification Experiments for FD DC and DSNU Reduction
4. Automotive Temperature Range Sensor Response Modeling and Measured Results
4.1. Temperature Modeling of the Pixel Behavior
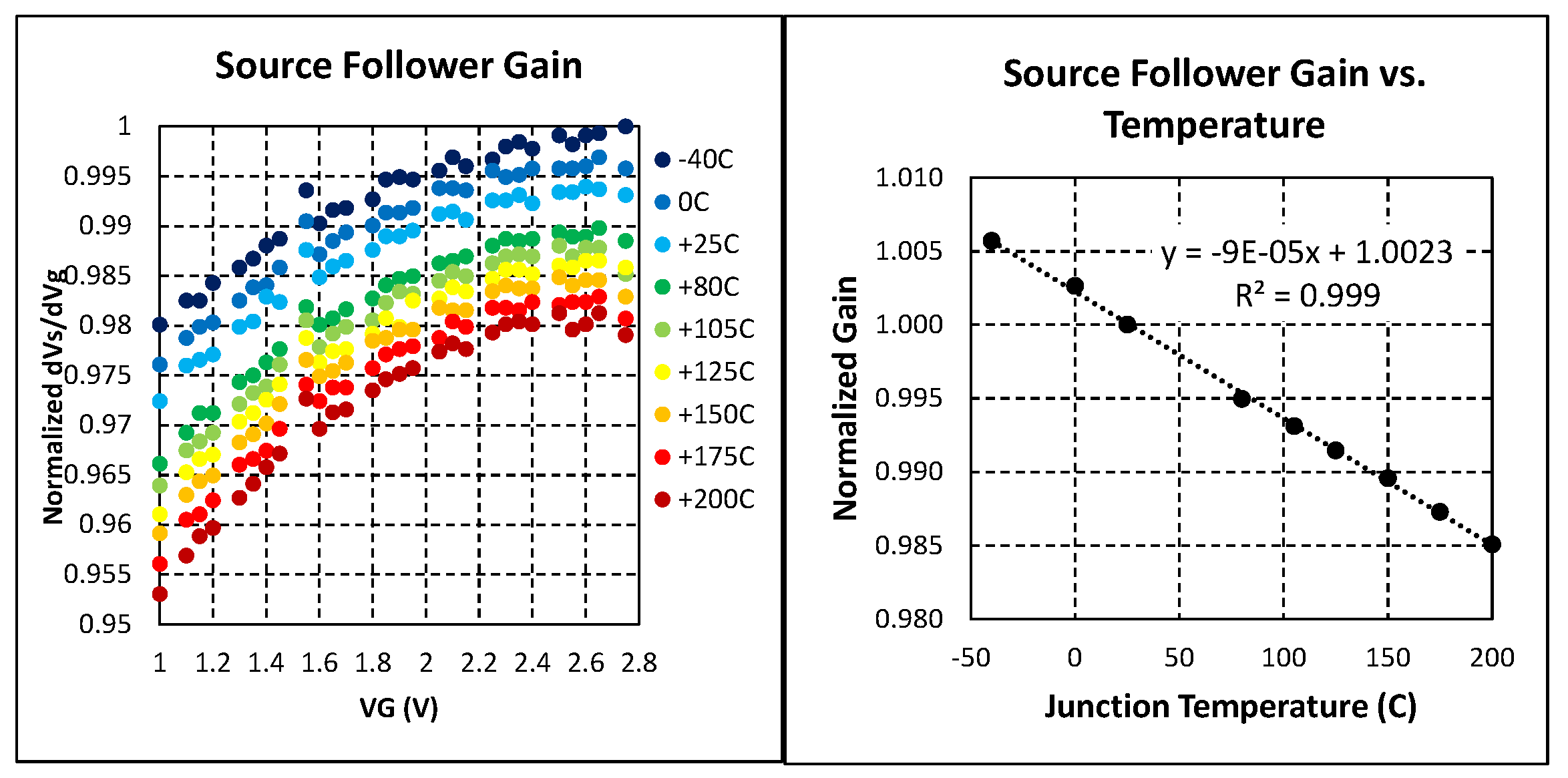
4.2. Source Follower and Pixel Transaction Factor Gain vs. Temperature
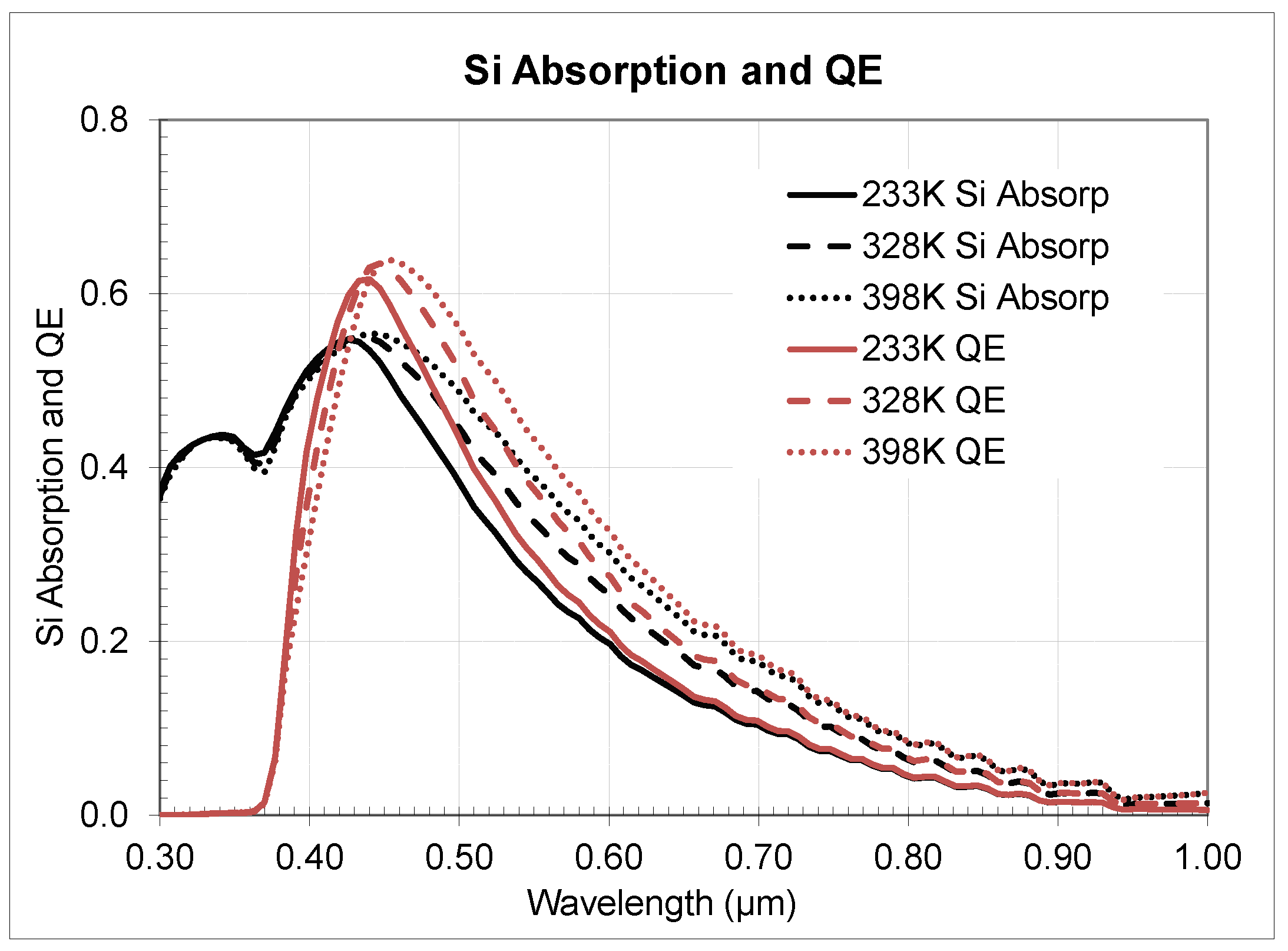
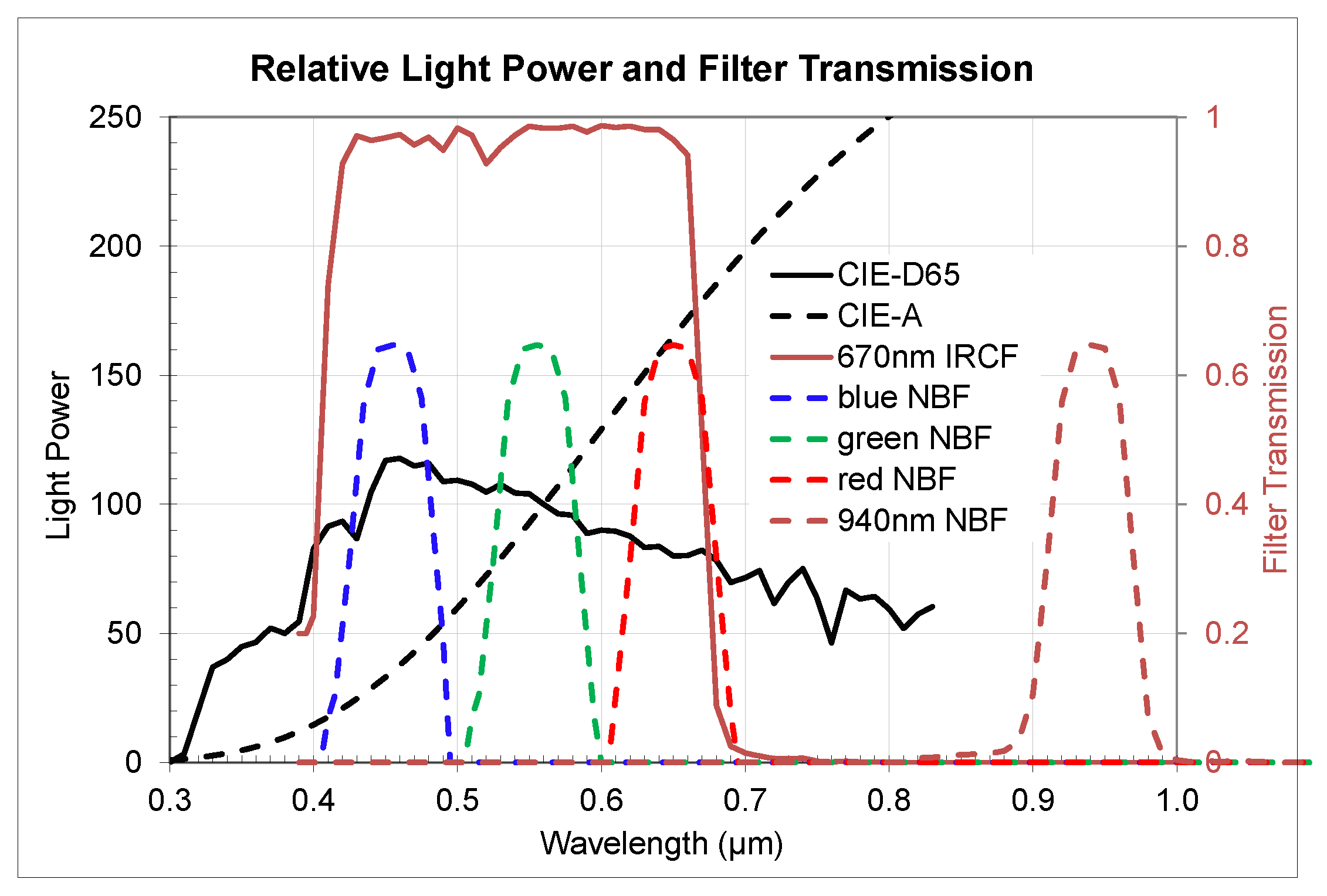
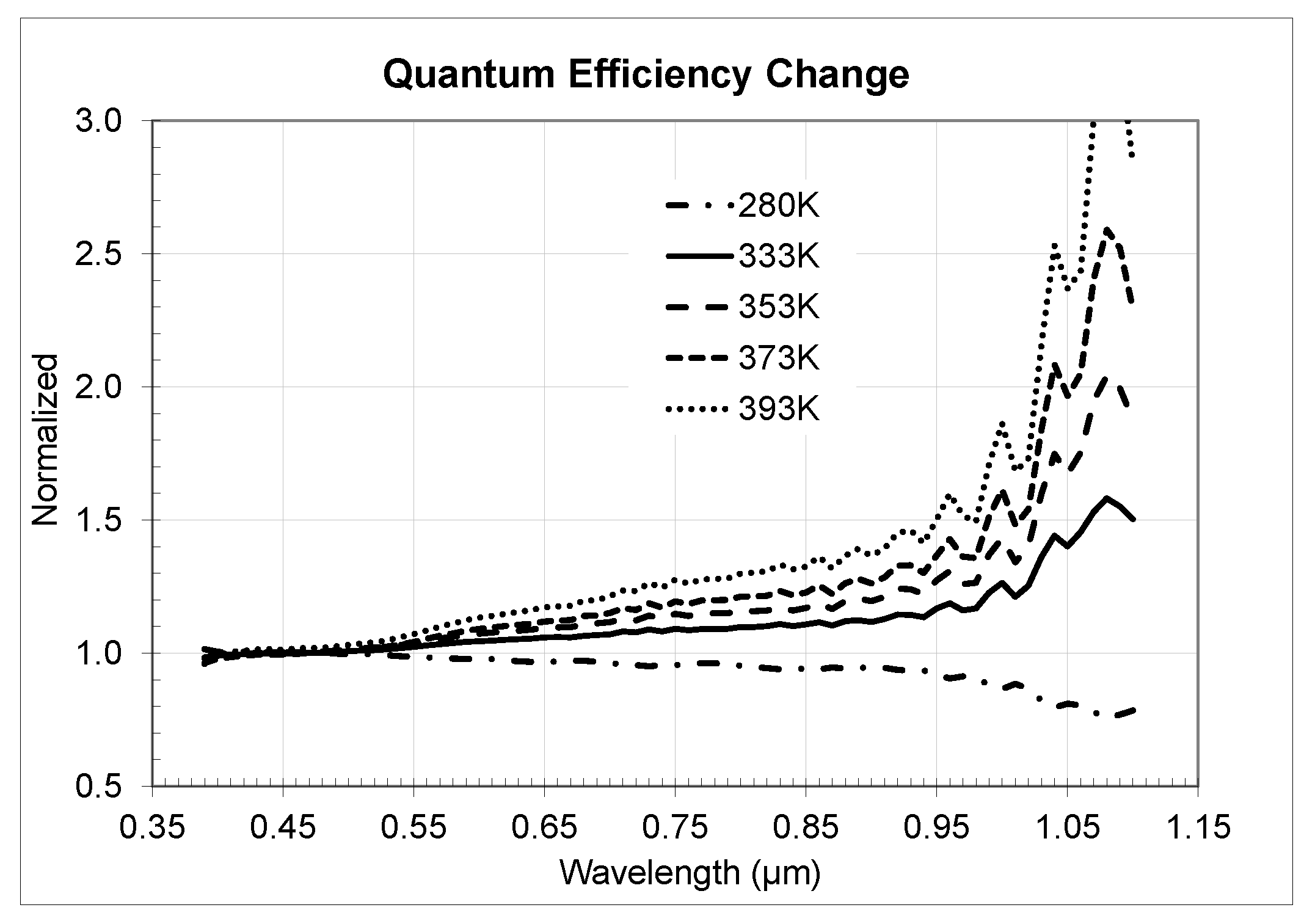
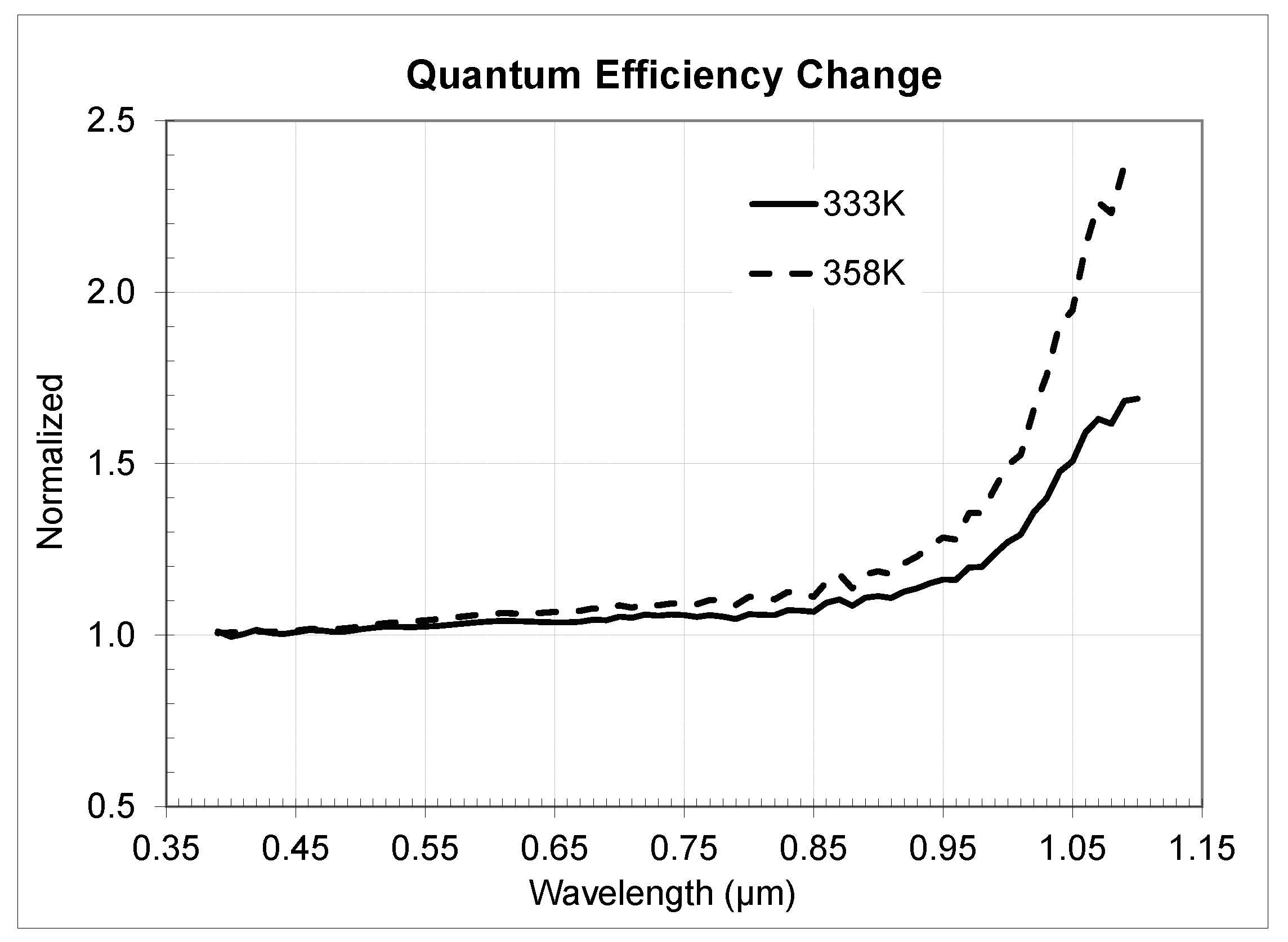
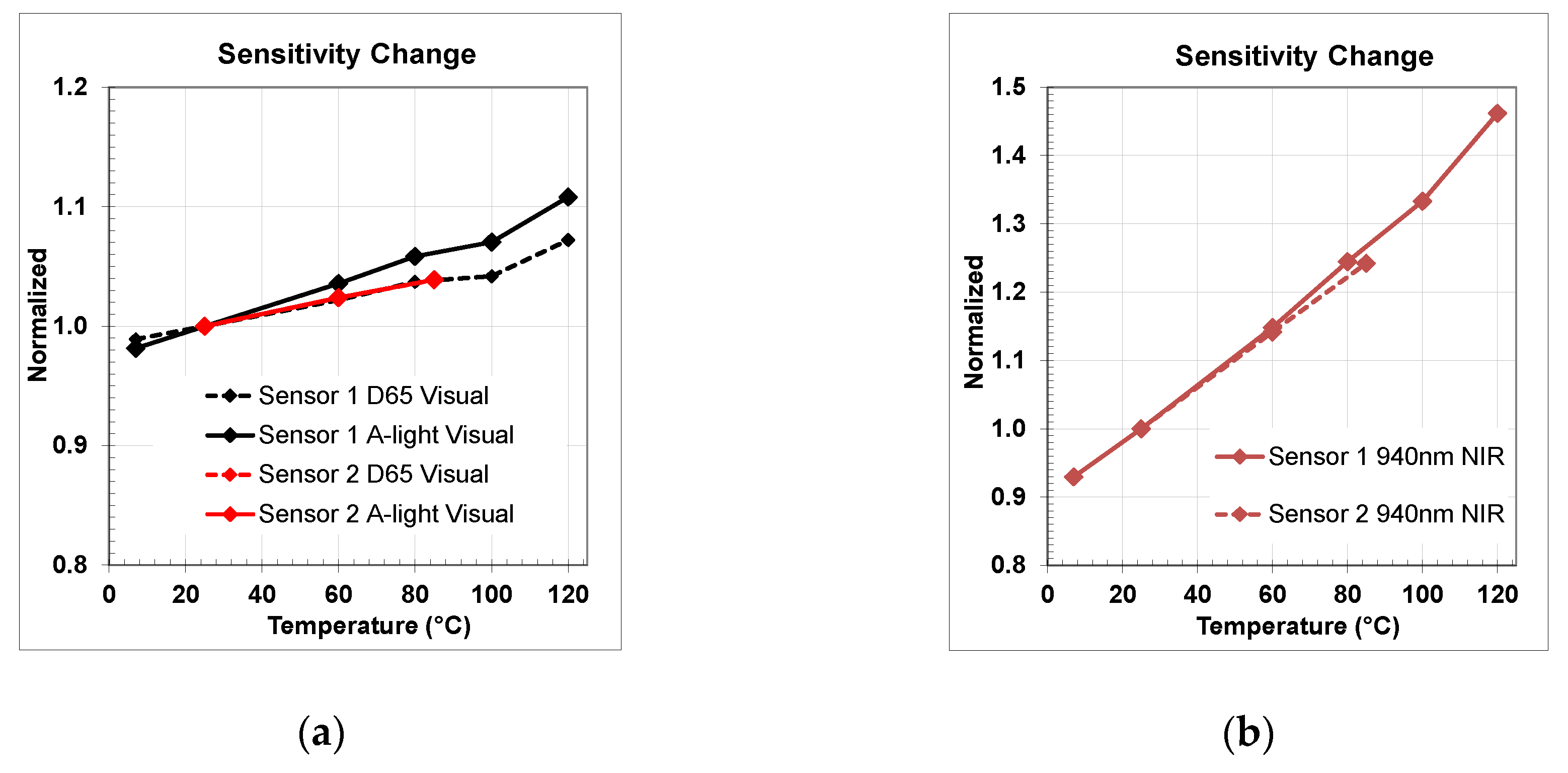
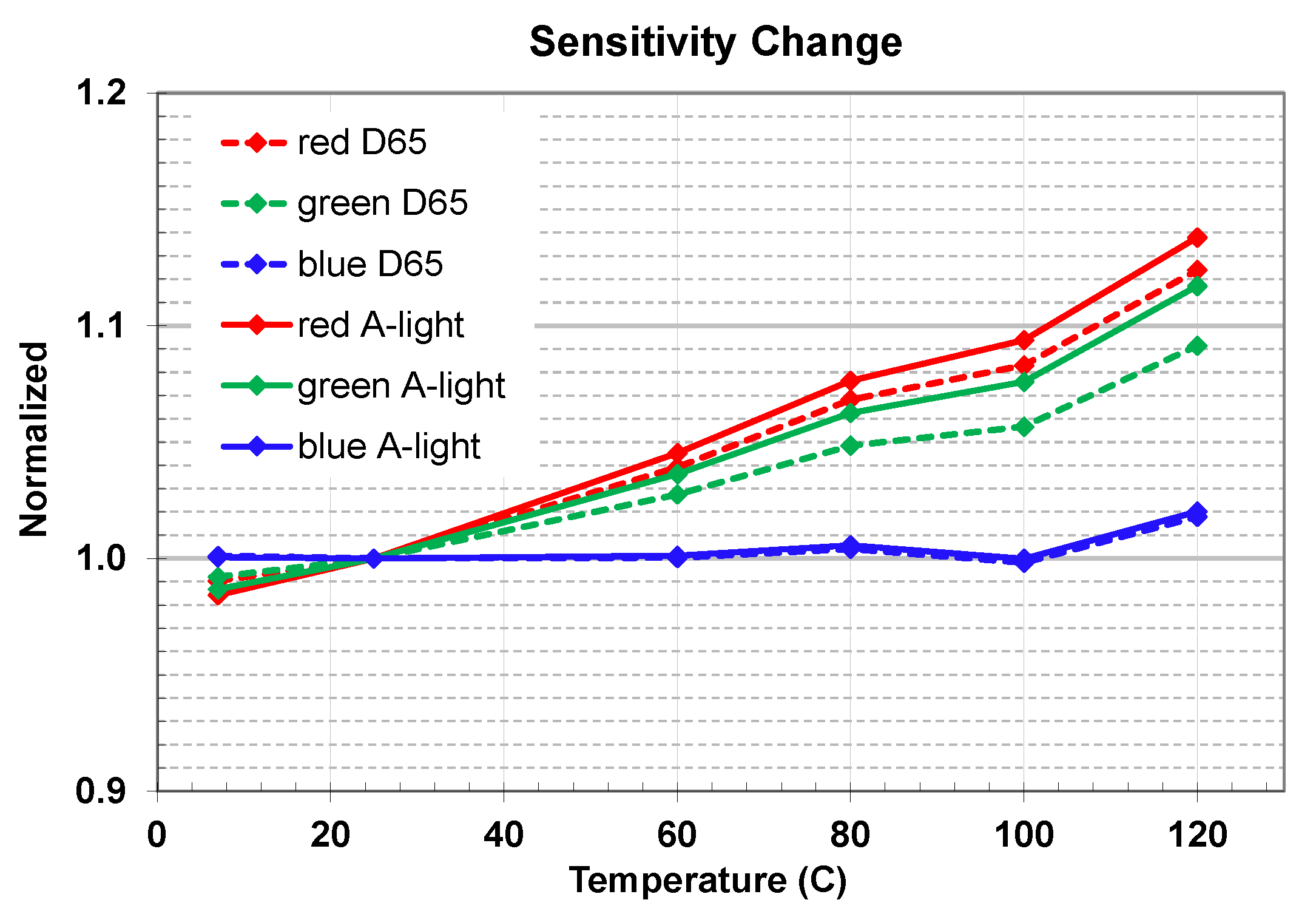
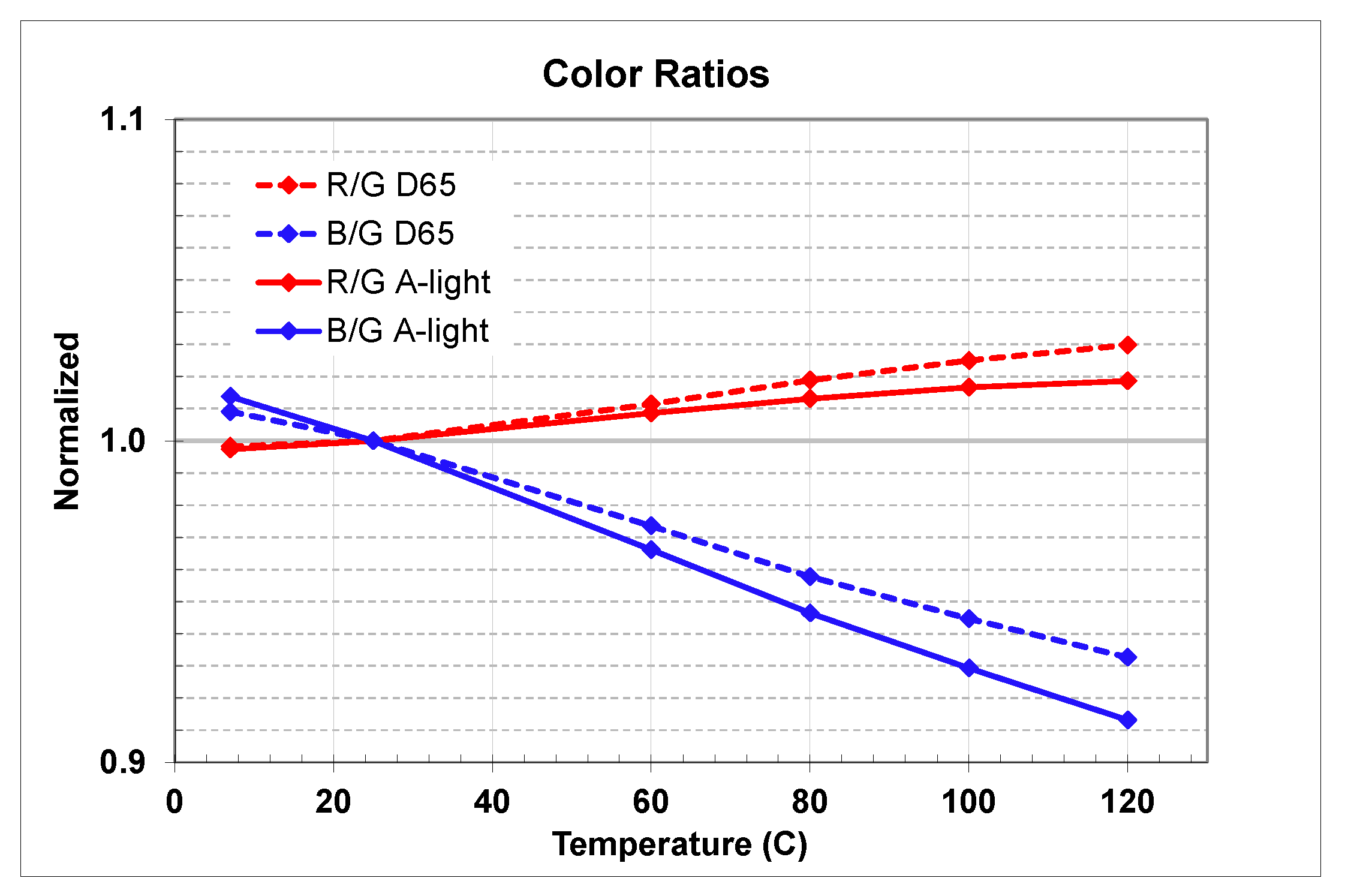
4.3. Quantum Efficiency, Sensitivity, and Color Ratios vs. Temperature
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Silsby, C.; Velichko, S.; Johnson, S.; Lim, Y.P.; Mentzer, R.; Beck, J. A 1.2MP 1/3 CMOS Image Sensor with Light Flicker Mitigation. In Proceedings of the IISW 2015, Vaals, The Netherlands, 8–11 June 2015. [Google Scholar]
- Velichko, S.; Johnson, S.; Pates, D.; Silsby, C.; Hoekstra, C.; Mentzer, R.; Beck, J. 140dB Dynamic Range Sub-electron Noise Floor Image Sensor. In Proceedings of the IISW 2017, Hiroshima, Japan, 30 May–2 June 2015. [Google Scholar]
- Iida, S.; Sakano, Y.; Asatsuma, T.; Takami, M.; Yoshiba, I.; Ohba, N.; Mizuno, H.; Oka, T.; Yamaguchi, K.; Suzuki, A.; et al. A 0.68e-rms random-noise 121dB dynamic-range sub-pixel architecture CMOS image sensor with LED flicker mitigation. In Proceedings of the 2018 IEEE International Electron Devices Meeting (IEDM), San Francisco, CA, USA, 1–5 December 2018; pp. 221–224. [Google Scholar]
- Yu, J.; Collins, D.J.; Yasan, A.; Bae, S.; Ramaswami, S. Hot Pixel reduction in CMOS image Sensor Pixels. In Proceedings of the IS&T/SPIE Electronic Imaging, San Jose, CA, USA, 17–21 January 2010; Volume 7537. [Google Scholar]
- Takahashi, S.; Huang, Y.-M.; Sze, J.-J.; Wu, T.-T.; Guo, F.-S.; Hsu, W.-C.; Tseng, T.-H.; Liao, K.; Kuo, C.-C.; Chen, T.-H.; et al. A 45nm Stacked CMOS Image Sensor Process Technology for Submicron Pixel. Sensors 2017, 17, 2816. [Google Scholar] [CrossRef] [Green Version]
- Akahane, N.; Adachi, S.; Mizobuchi, K.; Sugawa, S. Optimum Design of Conversion Gain and Full Well Capacity in CMOS Image Sensors with Lateral Overflow Integration Capacitor. IEEE Trans. Electron Devices 2009, 26, 2429–2435. [Google Scholar] [CrossRef]
- Schenk, A. A Model for the Field and Temperature Dependence of Shockley-Read-Hall Lifetimes in Silicon. Solid-State Electron. 1992, 35, 1585–1596. [Google Scholar] [CrossRef]
- Synopsys Sentaurus, Synopsys, Inc. Available online: https://www.synopsys.com/silicon/tcad/device-simulation/sentaurus-device.html (accessed on 3 March 2020).
- Green, M.; Keevers, M. Optical properties of intrinsic silicon at 300 K. Prog. Photovolt. Res. Appl. 1995, 3, 189–192. [Google Scholar] [CrossRef]
- Green, M. Self-consistent optical parameters of intrinsic silicon at 300 K including temperature coefficients. Sol. Energy Mater. Sol. Cells 2008, 92, 1305–1310. [Google Scholar] [CrossRef]
- Xie, S.; Theuwissen, A. Compensation for Process and Temperature Dependency in a CMOS Image Sensor. Sensors 2019, 19, 870. [Google Scholar] [CrossRef] [Green Version]
- CIE-D65 and CIE-A Data Sets. Available online: http://www.cie.co.at/ (accessed on 3 March 2020).


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Power supply | 2.8 V/1.8 V/1.2 V |
| Process technology | 65 nm 2P5M CMOS BSI |
| Optical format | 1/2.7 inch |
| Chip size | 8.8H mm × 8.0V mm |
| Pixel size | 3.0H µm × 3.0V µm |
| Number of active pixels | 2048 × 1280 = 2.6M |
| Responsivity (green, D65, 670 nm IRCF, 0.9 lens transmission) | 30.4 Ke–/lux·sec |
| Dark temporal noise (input referred noise) | 270 µVrms |
| Min. total SNR at E1/E2 transition (T1 = 16.6 ms) | 32 dB @25 °C, 31 dB @60 °C, 29 dB @80 °C, 25 dB @100 °C |
| Pixel linear full-well Dynamic range (includes TN and FPN) | 140 Ke– T1: 97 dB, T1+T2: 120 dB (T1/T2 = 126) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oh, M.; Velichko, S.; Johnson, S.; Guidash, M.; Chang, H.-C.; Tekleab, D.; Gravelle, B.; Nicholes, S.; Suryadevara, M.; Collins, D.; et al. Automotive 3.0 µm Pixel High Dynamic Range Sensor with LED Flicker Mitigation. Sensors 2020, 20, 1390. https://doi.org/10.3390/s20051390
Oh M, Velichko S, Johnson S, Guidash M, Chang H-C, Tekleab D, Gravelle B, Nicholes S, Suryadevara M, Collins D, et al. Automotive 3.0 µm Pixel High Dynamic Range Sensor with LED Flicker Mitigation. Sensors. 2020; 20(5):1390. https://doi.org/10.3390/s20051390
Chicago/Turabian StyleOh, Minseok, Sergey Velichko, Scott Johnson, Michael Guidash, Hung-Chih Chang, Daniel Tekleab, Bob Gravelle, Steve Nicholes, Maheedhar Suryadevara, Dave Collins, and et al. 2020. "Automotive 3.0 µm Pixel High Dynamic Range Sensor with LED Flicker Mitigation" Sensors 20, no. 5: 1390. https://doi.org/10.3390/s20051390