Investigation on Vortex-Induced Vibration Experiment of a Standing Variable-Tension Deepsea Riser Based on BFBG Sensor Technology

Abstract
:1. Introduction
2. Bare Fiber Grating Sensing Technology and Data Analysis Method
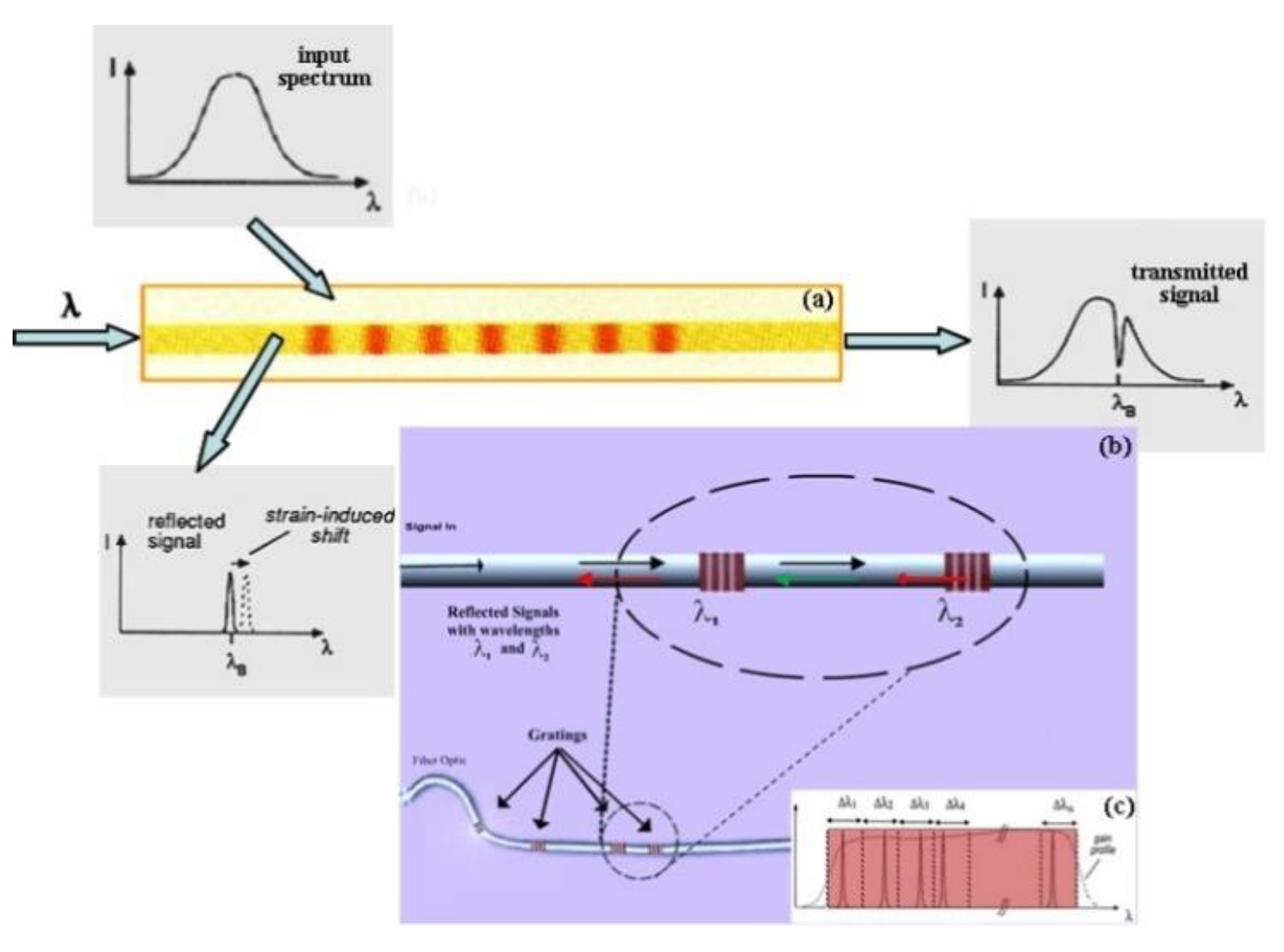
2.1. Working Principle of BFBG Sensor Technology
2.2. Data Analysis Methods
2.2.1. Analysis of Strain Data
2.2.2. Time Frequency Analysis Method
2.2.3. Strain Signal Based Modal Analysis Theory
3. Experimental Set-up
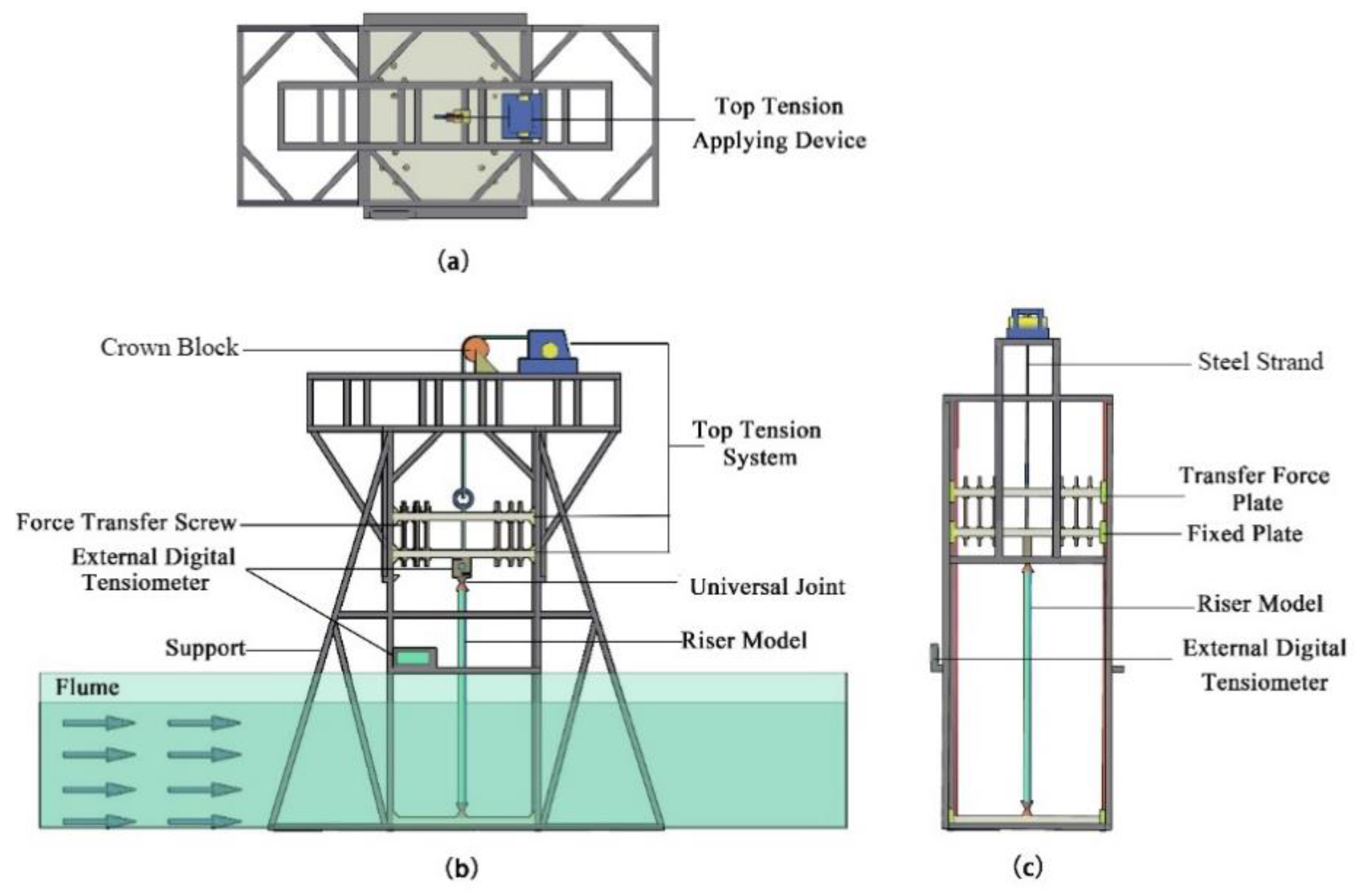
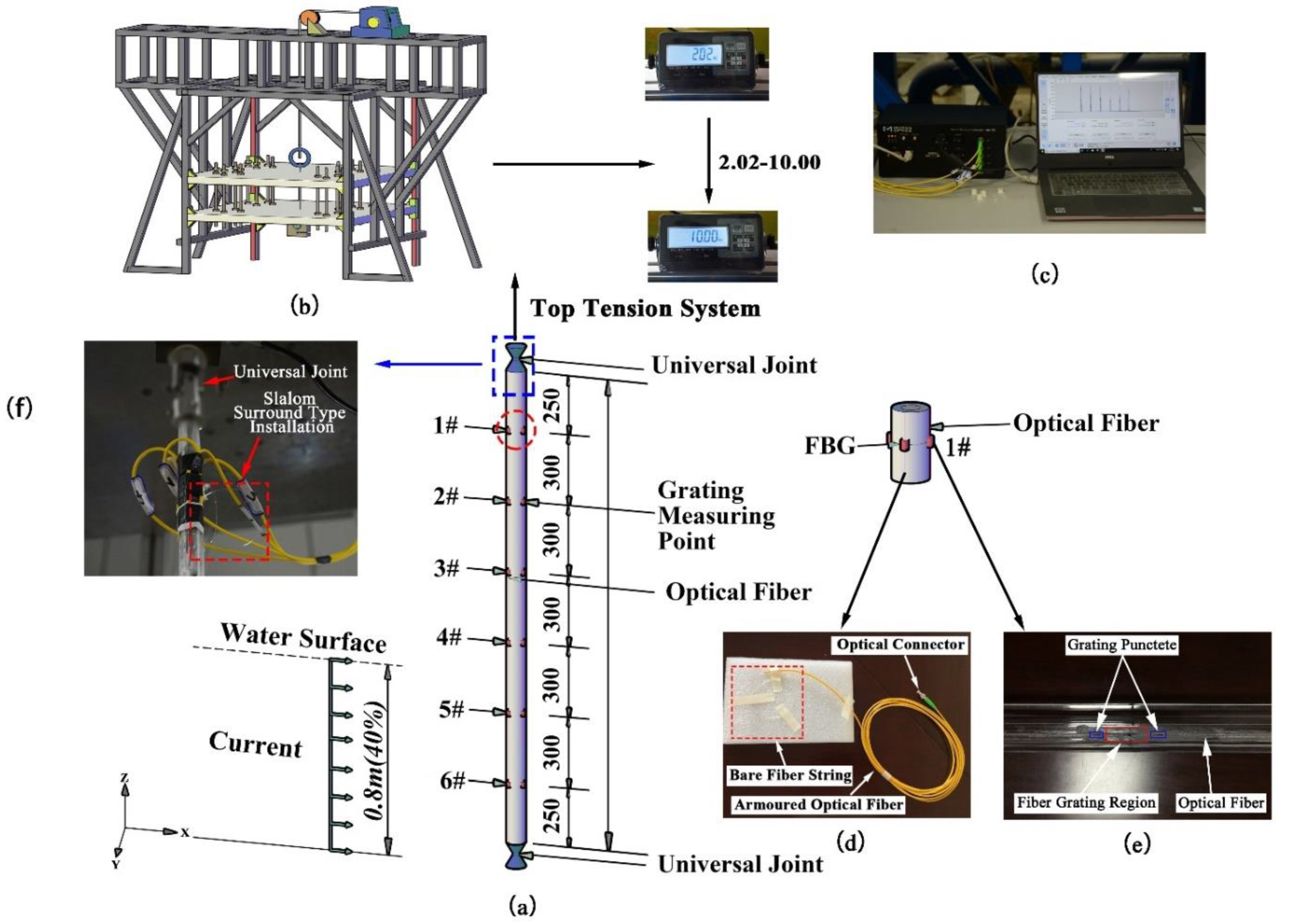
3.1. Experimental Apparatus
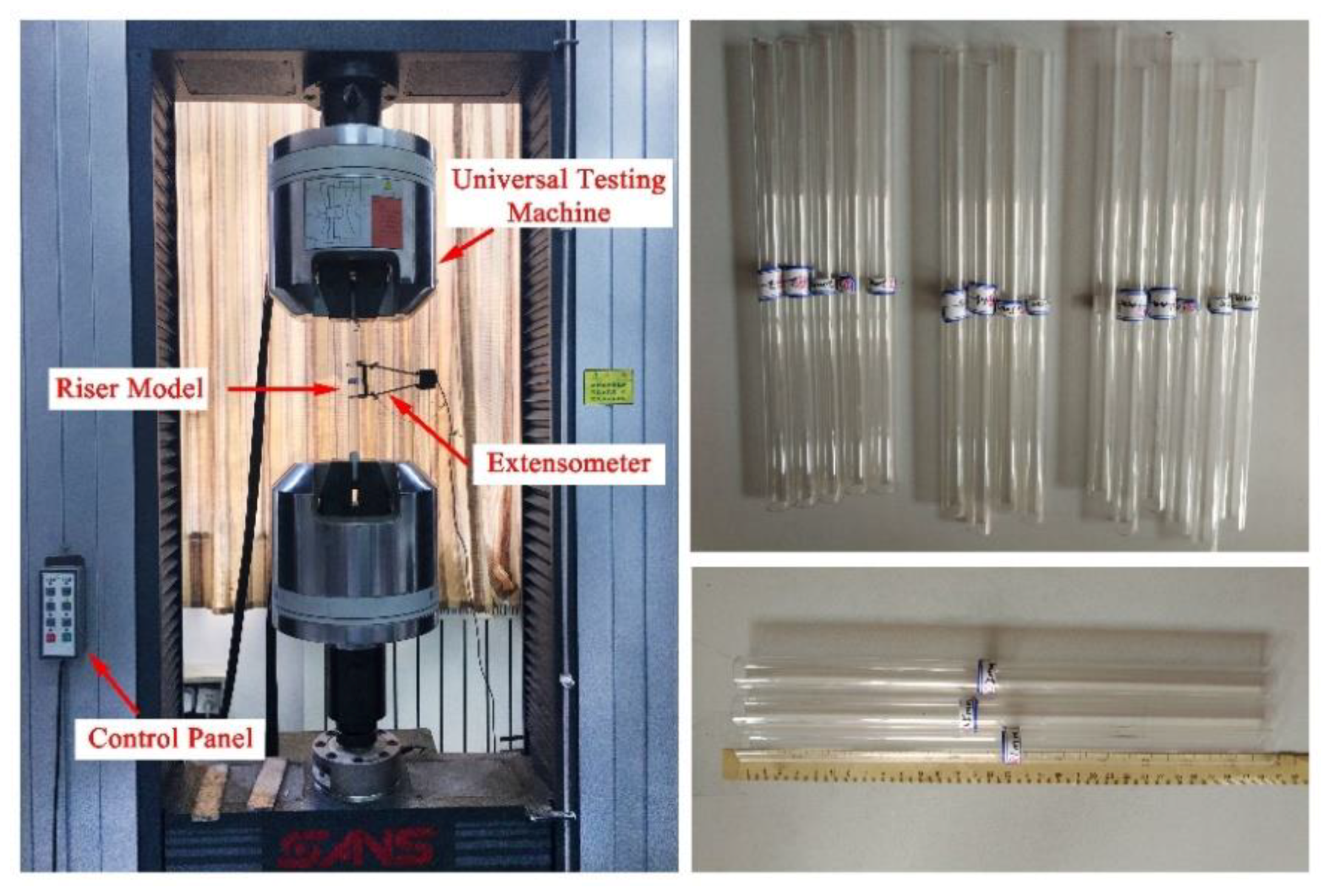
3.2. Riser Model
3.3. BFBG Sensors
3.4. Riser VIV Test Cases under Different Top Tensions
4. Results and Discussion
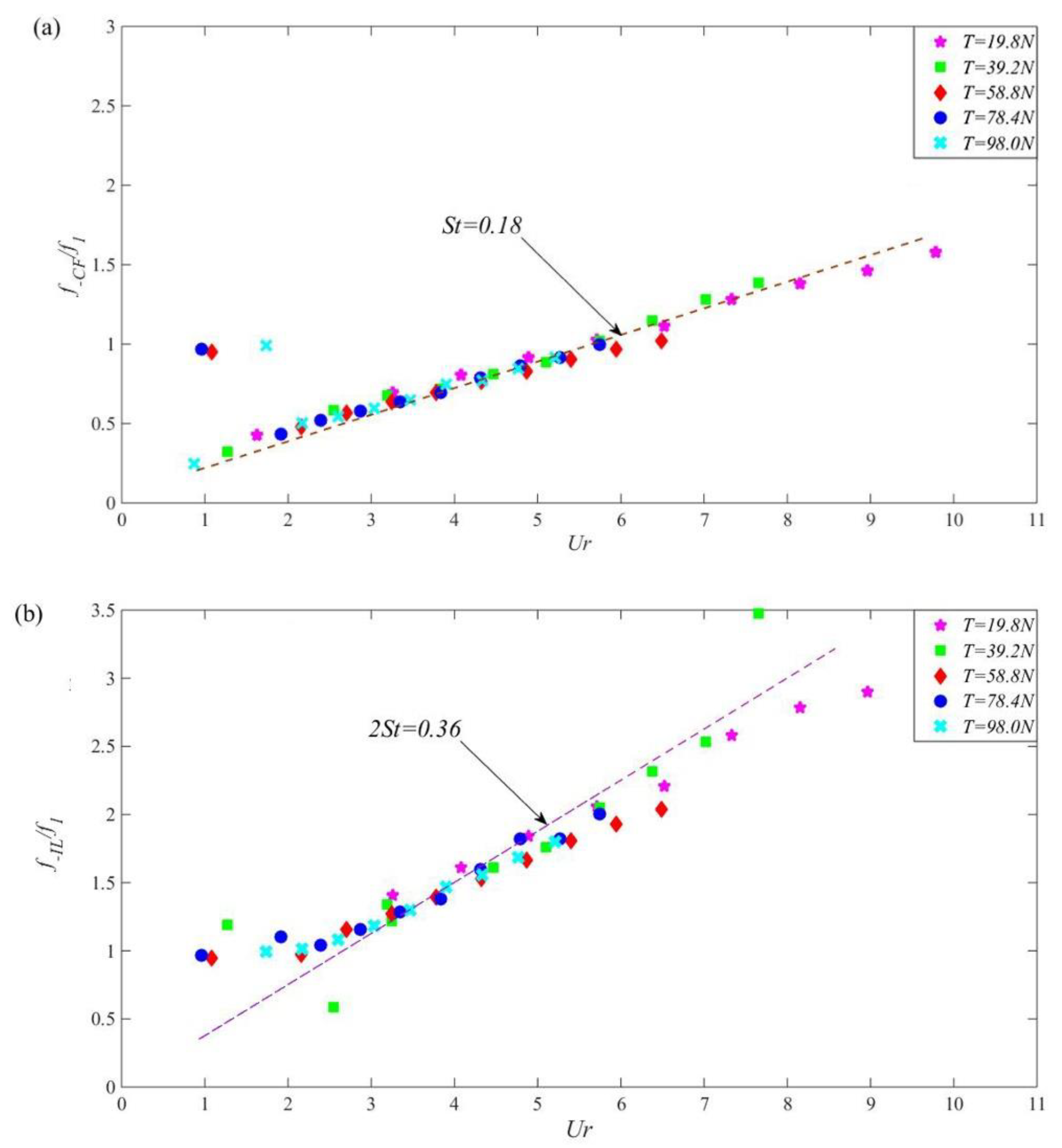
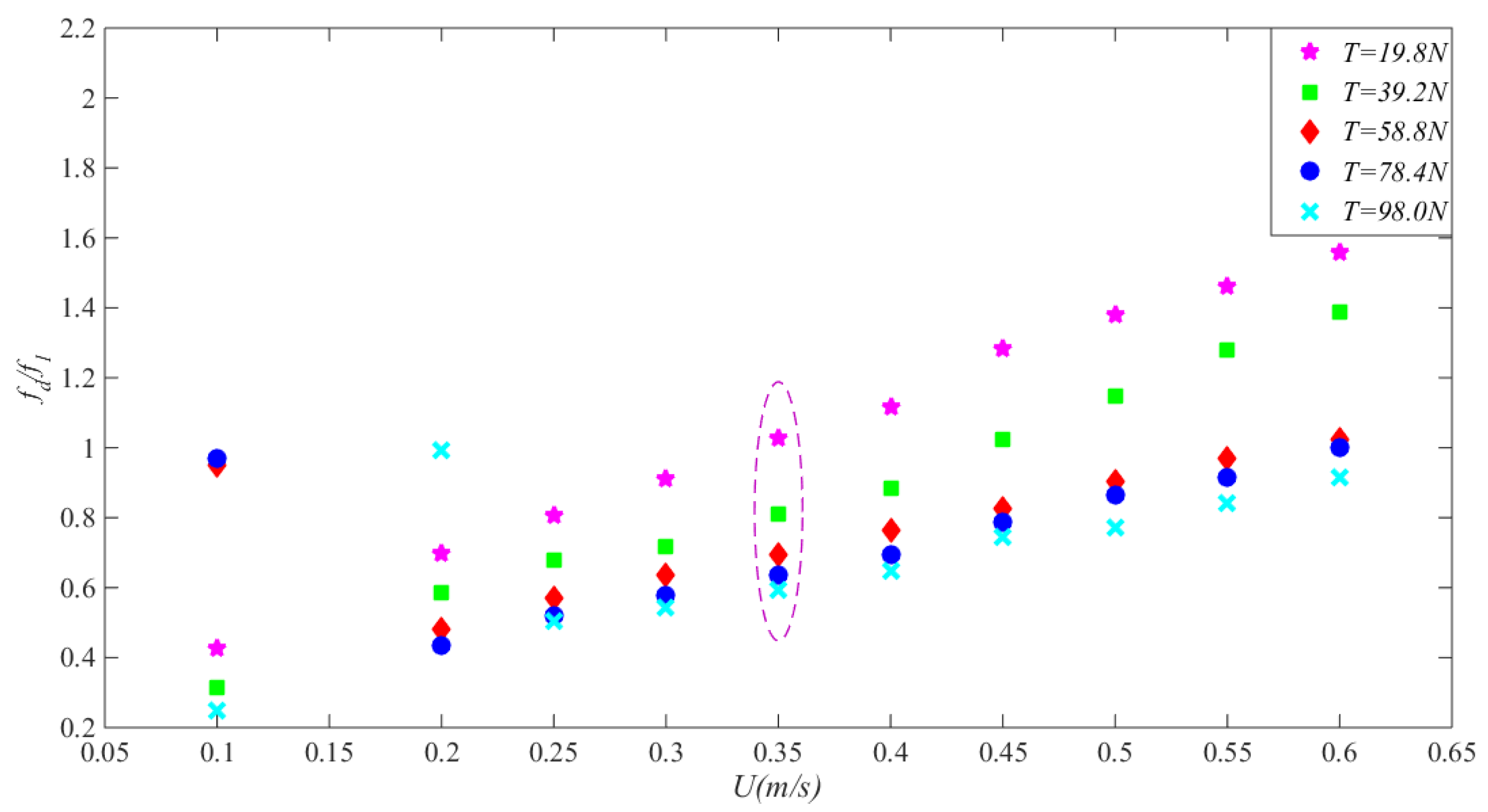
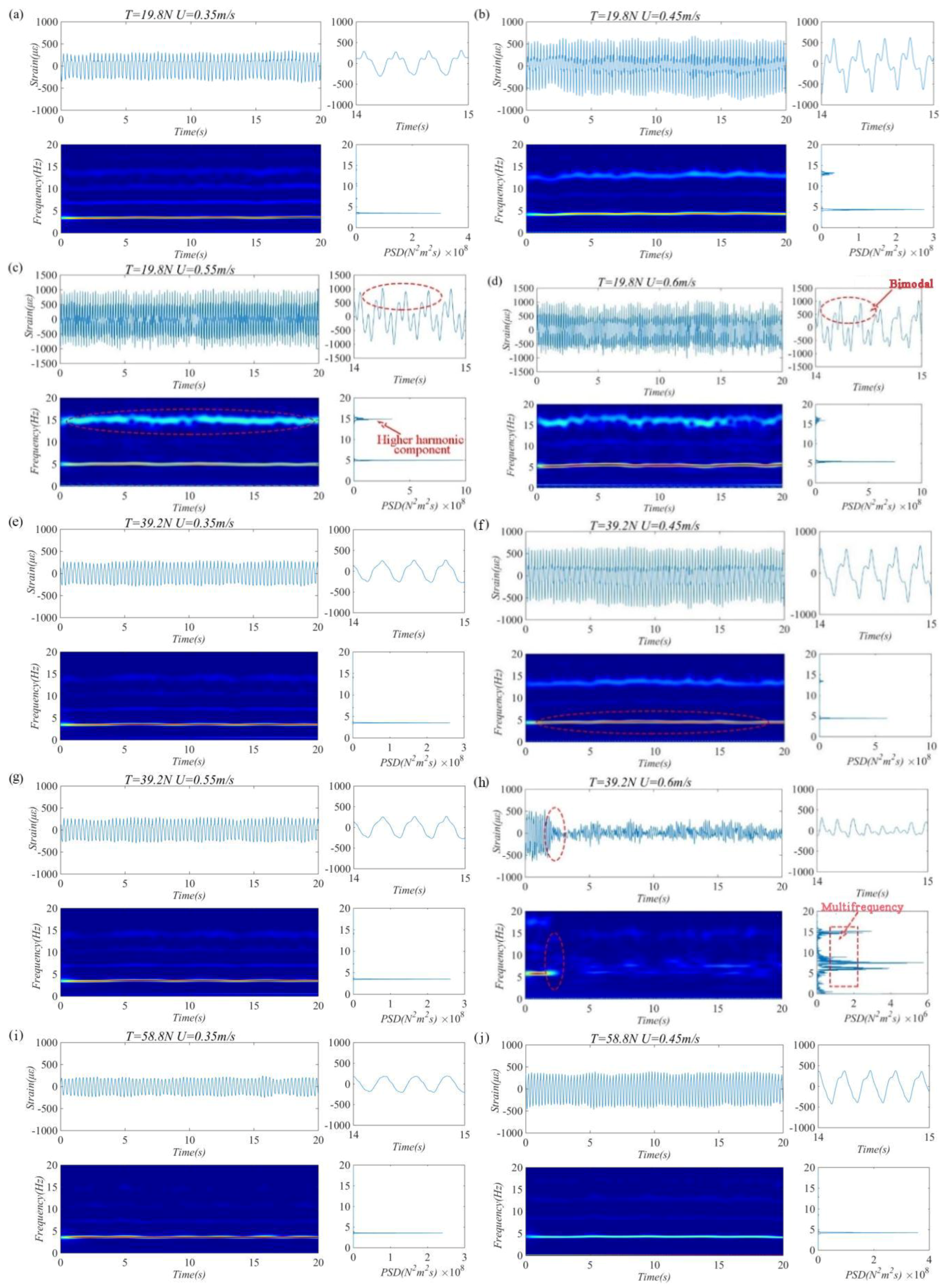
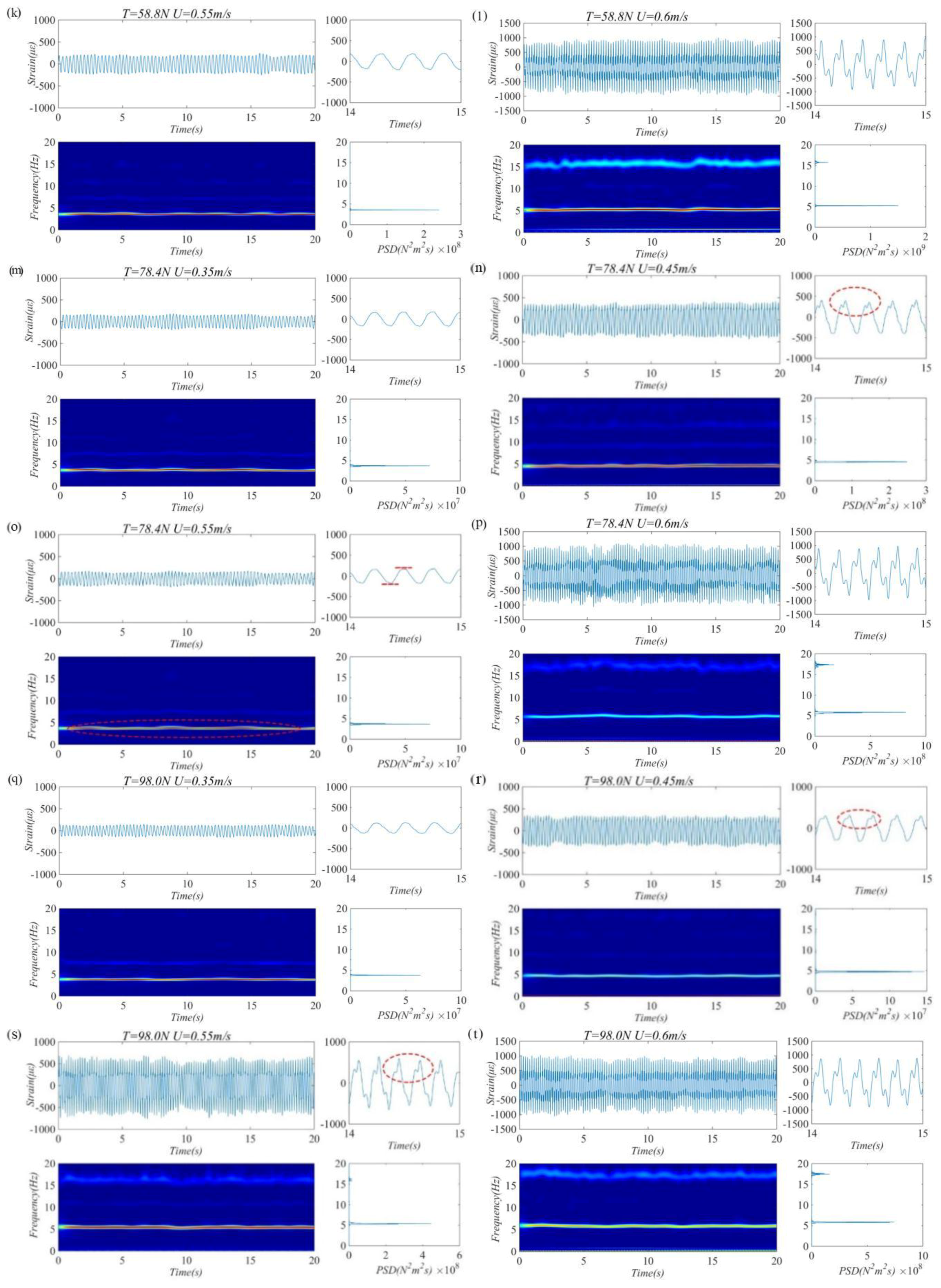
4.1. Response Frequency
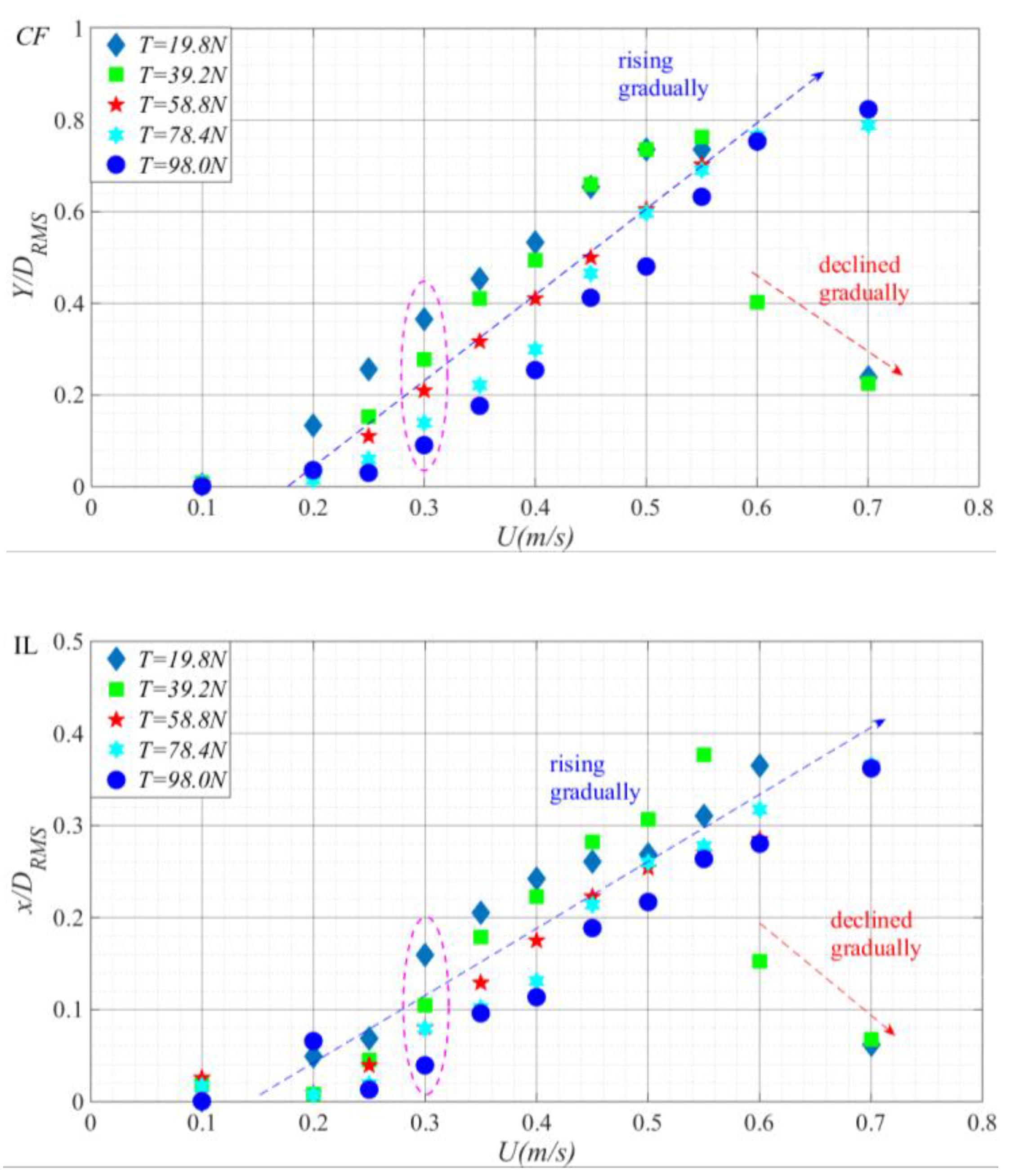
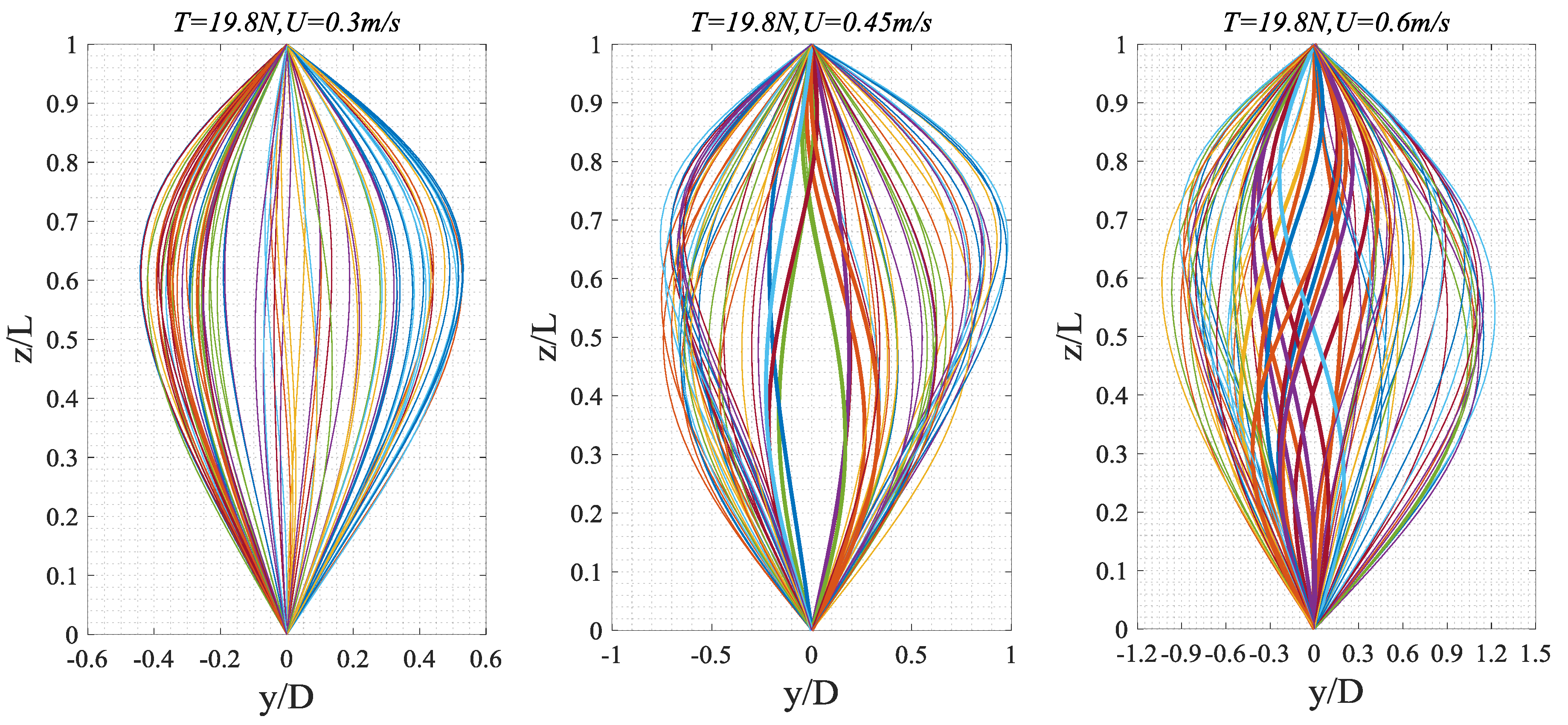
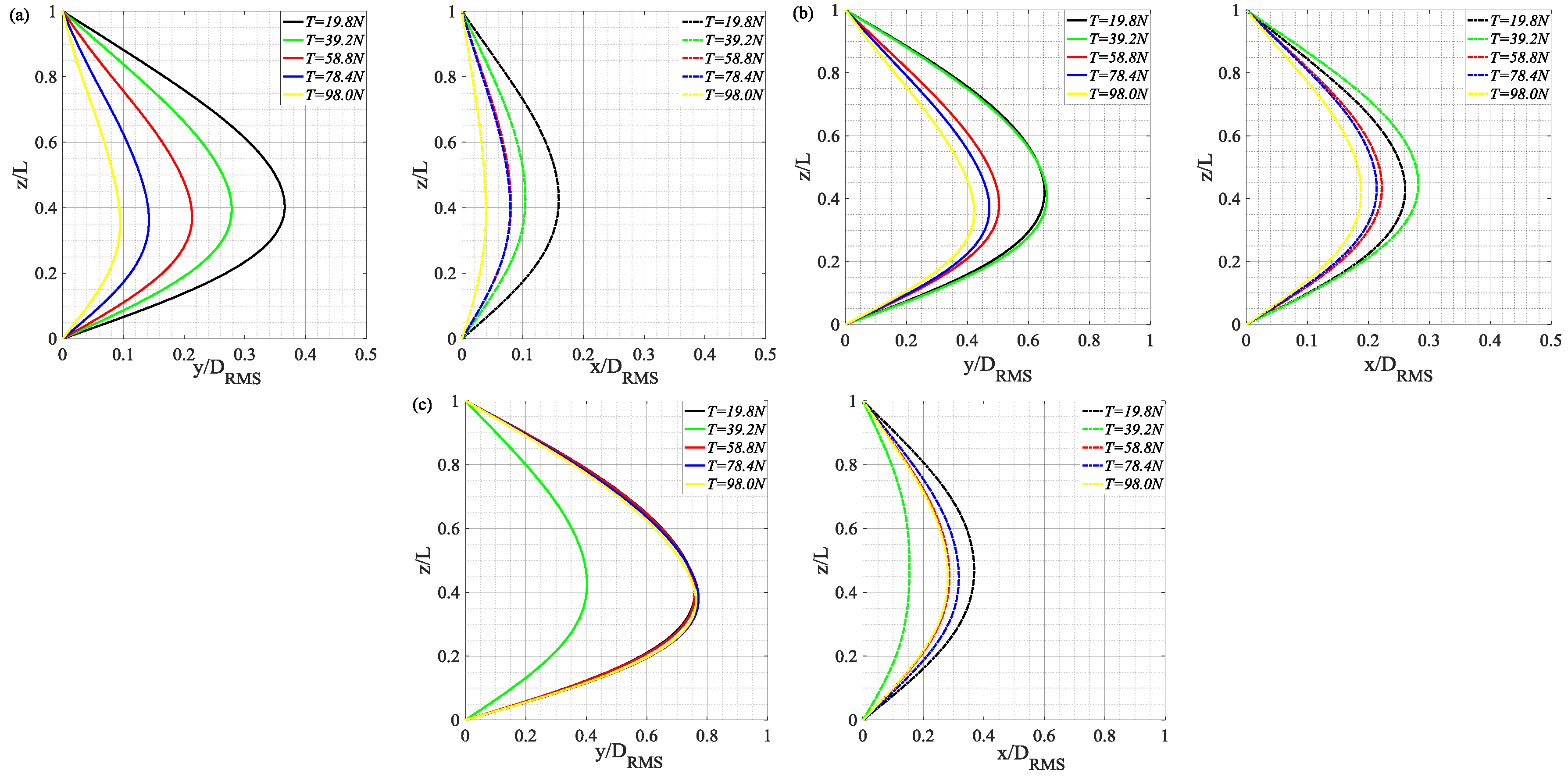
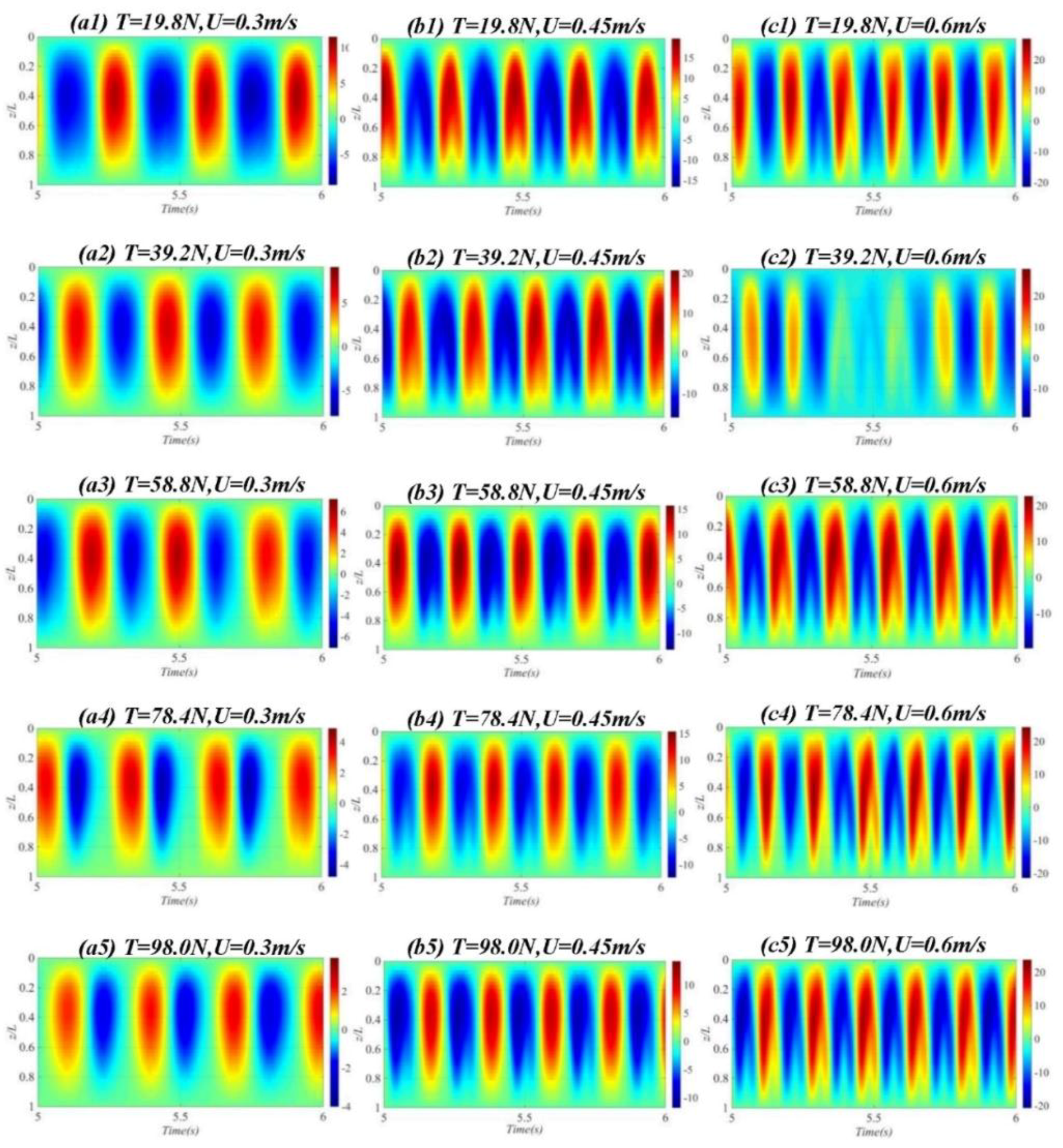
4.2. VIV Displacement Response Analysis
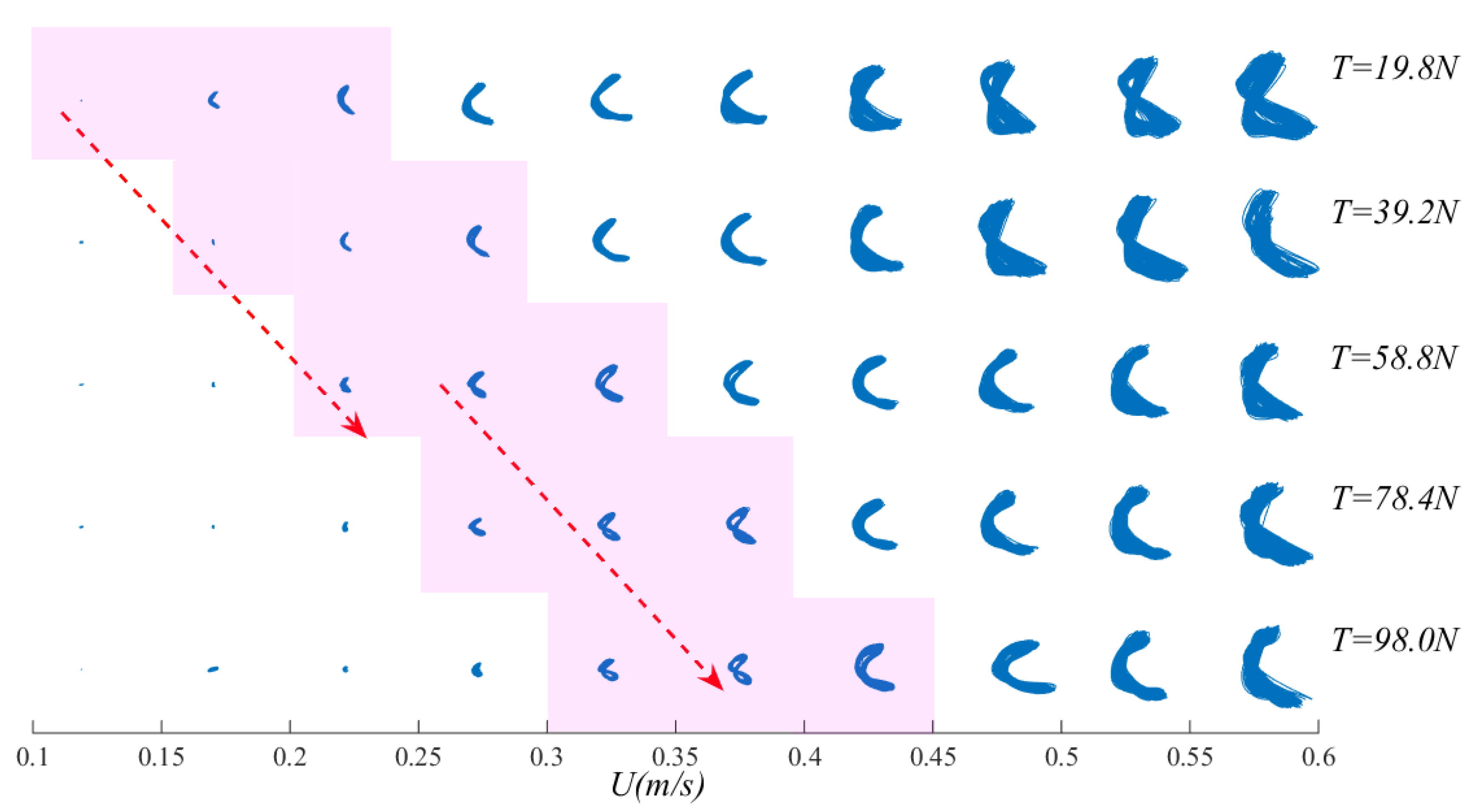
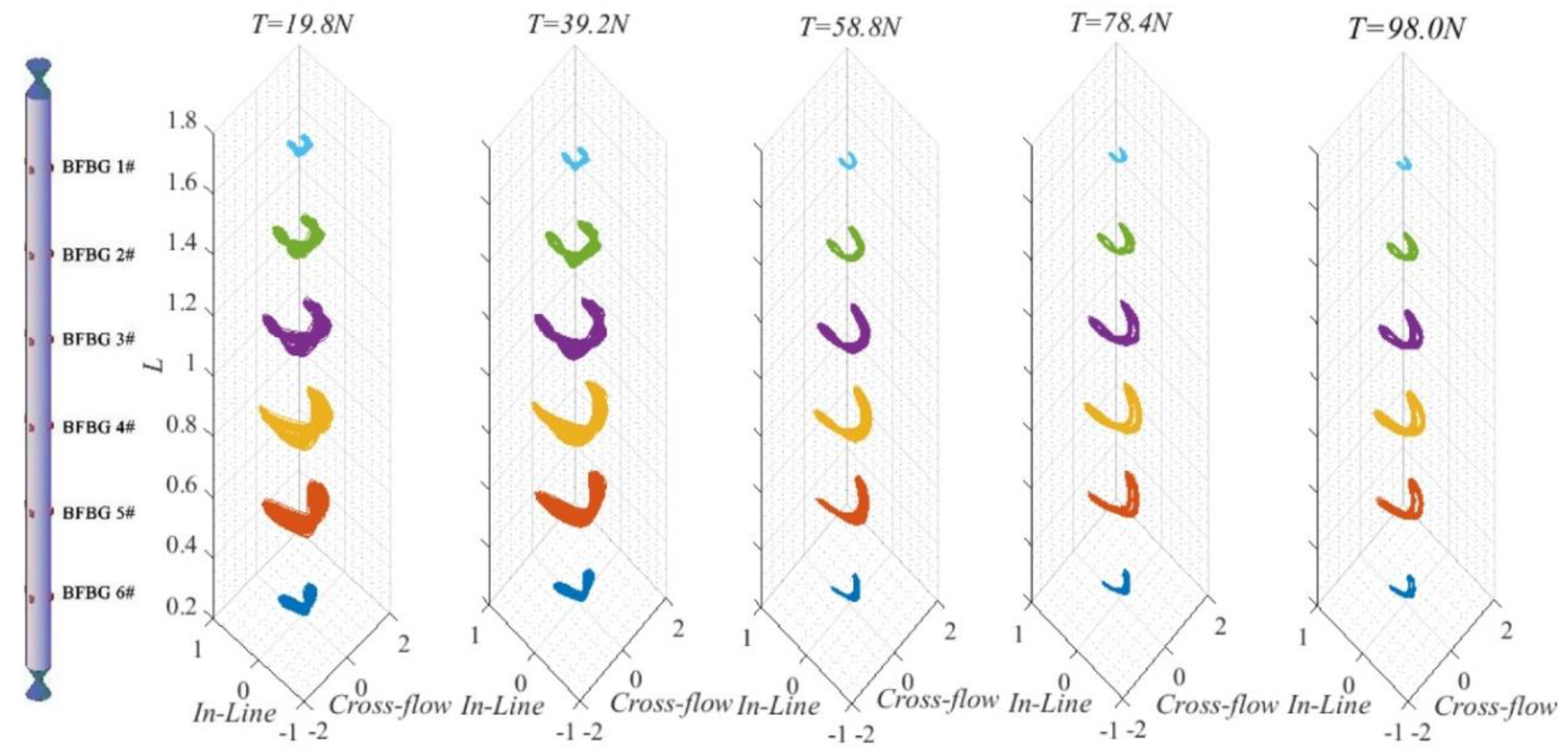
4.3. Cross-Flow and in-Line Coupling
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gedikli, E.D.; Dahl, J.M. Mode excitation hysteresis of a flexible cylinder undergoing vortex-induced vibrations. J. Fluids Struct. 2017, 69, 308–322. [Google Scholar] [CrossRef]
- Leclercq, T.; Delangre, E. Vortex-induced vibrations of cylinders bent by the flow. J. Fluids Struct. 2018, 80, 77–93. [Google Scholar] [CrossRef]
- Chaplin, J.R.; Bearman, P.W.; Huera-Huarte, F.J.; Pattenden, R.J. Laboratory measurements of vortex-induced vibrations of a vertical tension riser in a stepped current. J. Fluids Struct. 2005, 21, 3–24. [Google Scholar] [CrossRef]
- Lie, H.; Kaasen, K.E. Modal analysis of measurements from a large-scale VIV model test of a riser in linearly sheared flow. J. Fluids Struct. 2006, 22, 557–575. [Google Scholar] [CrossRef]
- Huera-Huarte, F.J.; Bearman, P.W. Wake structures and vortex-induced vibrations of a long flexible cylinder—Part 1: Dynamic response. J. Fluids Struct. 2009, 25, 969–990. [Google Scholar] [CrossRef]
- Huera-Huarte, F.J.; Bearman, P.W. Wake structures and vortex-induced vibrations of a long flexible cylinder—Part 2: Drag coefficients and vortex modes. J. Fluids Struct. 2009, 25, 991–1006. [Google Scholar] [CrossRef]
- Lee, L.; Allen, D. Vibration frequency and lock-in bandwidth of tensioned, flexible cylinders experiencing vortex shedding. J. Fluids Struct. 2010, 26, 602–610. [Google Scholar] [CrossRef]
- Srinil, N. Analysis and prediction of vortex-induced vibrations of variable- tension vertical risers in linearly sheared currents. J. Appl. Ocean Res. 2011, 33, 41–53. [Google Scholar] [CrossRef]
- Gao, G.H.; Cui, Y.J.; Qiu, X.Q.; Shu, Q. Analysis of natural vibration characteristics of deep-sea full-size tension riser. Pet. Mach. 2018, 46, 35–41. [Google Scholar]
- Li, X.M.; Zhang, L.; Niu, J.J.; Han, Y.Q.; Guo, H.Y. Dynamic response analysis of deep-sea tension riser based on vector finite element method. Vib. Shock 2016, 35, 218–223. [Google Scholar]
- Zhang, J.; Tang, Y.G. Study on Mathieu instability of deepsea top tension riser. Ship Mech. 2014, 18, 1142–1150. [Google Scholar]
- Zhang, W.; Chen, M.Z. An experimental study on the characteristic pattern of internal solitary waves in optical remote-sensing images. Int. J. Remote Sens. 2019, 40, 7017–7032. [Google Scholar] [CrossRef]
- Hong, l.; Liu, Z.W.; Zhu, Y.; Zheng, B.; Liu, F.X. Experimental study on an FBG strain sensor. Opt. Fiber Technol. 2018, 40, 144–151. [Google Scholar]
- Campanella, C.E.; Cuccovillo, A.C.; Clarissa, Y.A.; Passaro, V.M.N. Fibre Bragg Grating Based Strain Sensors: Review of Technology and Applications. Sensors 2018, 18, 3115. [Google Scholar] [CrossRef]
- Leal-Junior, A.G.; Frizera, A.; Daz, C.R.; Ribeiro, M.R.; Pontes, M.J. FBG-embedded oblong diaphragms with extended dynamic range. IEEE Sens. Lett. 2018, 2, 1–4. [Google Scholar] [CrossRef]
- Yuan, Q.; Wang, Z.Y.; Song, L.P.; Lu, Z.Y.; Hu, D.N.; Qin, J.Q.; Yang, T.X. A Fast Linearly Wavelength Step-Swept Light Source Based on Recirculating Frequency Shifter and Its Application to FBG Sensor Interrogation. Sensors 2019, 19, 593. [Google Scholar] [CrossRef]
- Morey, W.W.; Meltz, G.; Glenn, W.H. Fiber optic Bragg grating sensors. Proc. SPIE 1990, 1169, 98–107. [Google Scholar]
- Othonos, A. Fiber bragg gratings. Rev. Sci. Instrum. 1997, 68, 4309–4341. [Google Scholar] [CrossRef]
- Huang, J.; Zhou, Z.; Zhang, L.; Chen, J.; Ji, C.; Pham, D.T. Strain modal analysis of small and light pipes using distributed fibre bragg grating sensors. Sensors 2016, 16, 1583. [Google Scholar] [CrossRef]
- Peng, J.; Jia, S.; Jin, Y.; Xu, S.; Xu, Z. Design and investigation of a sensitivity-enhanced fiber Bragg grating sensor for micro-strain measurement. Sens. Actuators A Phys. 2019, 285, 437–447. [Google Scholar] [CrossRef]
- Song, J.; Lu, L.; Teng, B.; Park, H.; Tang, G.; Wu, H. Laboratory tests of vortex-induced vibrations of a long flexible riser pipe subjected to uniform flow. Ocean Eng. 2011, 38, 1308–1322. [Google Scholar] [CrossRef]
- Huera-Huarte, F.J.; Bangash, Z.A.; González, L.M. Towing tank experiments on the vortex-induced vibrations of low mass ratio long flexible cylinders. Fluids Struct. 2014, 48, 81–92. [Google Scholar] [CrossRef]
- Xu, W.; Cheng, A.; Ma, Y.; Gao, X. Multi-mode flow-induced vibrations of two side-by-side slender flexible cylinders in a uniform flow. Mar. Struct. 2018, 57, 219–236. [Google Scholar] [CrossRef] [Green Version]
- Blevins, R.D. Flow Induced Vibration; Van Nostrand Reinhold Co.: New York, NA, USA, 1977; p. 377. [Google Scholar]
- Xu, P.; Hao, W.S. Vibration Signal Processing and Data Analysis, 3rd ed.; Science Press: Beijing, China, 2016; pp. 205–207. [Google Scholar]
- Zhu, H.J.; Lin, P.Z.; Gao, Y. Vortex-induced vibration and mode transition of a curved flexible free-hanging cylinder in exponential shear flows. J. Fluids Struct. 2019, 84, 56–76. [Google Scholar] [CrossRef]
- Bai, X.; Le, Z.B. Study on the traveling wave effect of vortex-induced vibration of a long flexible tube under the action of stepped flow. Ship Mech. 2018, 22, 1421–1430. [Google Scholar]
- Gedikli, E.D.; Chelidze, D.; Dahl, J.M. Observed mode shape effects on the vortex-induced vibration of bending dominated flexible cylinders simply supported at both ends. J. Fluids Struct. 2018, 81, 399–417. [Google Scholar] [CrossRef] [Green Version]
- Li, P. Study on Vortex-Induced Vibration and Interference Experiment of Deep-Water Marine Conveyance Riser. Ph.D. Thesis, Ocean University of China, Qingdao, China, 2012. [Google Scholar]
- Vandiver, J.K.; Yong, J.Y. The relationship between in-line and cross-flow vortex-induced vibration of cylinders. J. Fluids Struct. 1987, 1, 381–399. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Value |
|---|---|---|
| Total length L | m | 2.0 |
| Outer diameter D | mm | 18.0 |
| Wall thickness δ | mm | 1.0 |
| Mass per unit length m | Kg | 0.065 |
| Sectional area S | mm2 | 53.41 |
| Submerged length Ls | m | 0.8 (40%) |
| Slenderness ratio (λ =L/D) | - | 111.11 |
| Elasticity modulus E | GPa | 2.391 |
| Bending rigidity EI | N·m2 | 4.63 |
| Material M | - | PMMA |
| Top Tension (N) | Serial Number (m/s) | Inherent Frequency (Hz) |
|---|---|---|
| 19.8 | 0.1–0.6 | 3.408 |
| 39.2 | 0.1–0.6 | 4.354 |
| 58.8 | 0.1–0.6 | 5.139 |
| 78.4 | 0.1–0.6 | 5.801 |
| 98.0 | 0.1–0.6 | 6.403 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, P.; Cong, A.; Dong, Z.; Wang, Y.; Liu, Y.; Guo, H.; Li, X.; Fu, Q. Investigation on Vortex-Induced Vibration Experiment of a Standing Variable-Tension Deepsea Riser Based on BFBG Sensor Technology. Sensors 2019, 19, 3419. https://doi.org/10.3390/s19153419
Li P, Cong A, Dong Z, Wang Y, Liu Y, Guo H, Li X, Fu Q. Investigation on Vortex-Induced Vibration Experiment of a Standing Variable-Tension Deepsea Riser Based on BFBG Sensor Technology. Sensors. 2019; 19(15):3419. https://doi.org/10.3390/s19153419
Chicago/Turabian StyleLi, Peng, Aijun Cong, Zhengkai Dong, Yu Wang, Yu Liu, Haiyan Guo, Xiaomin Li, and Qiang Fu. 2019. "Investigation on Vortex-Induced Vibration Experiment of a Standing Variable-Tension Deepsea Riser Based on BFBG Sensor Technology" Sensors 19, no. 15: 3419. https://doi.org/10.3390/s19153419