Integrated Ground-Based SAR Interferometry, Terrestrial Laser Scanner, and Corner Reflector Deformation Experiments

Abstract
:1. Introduction
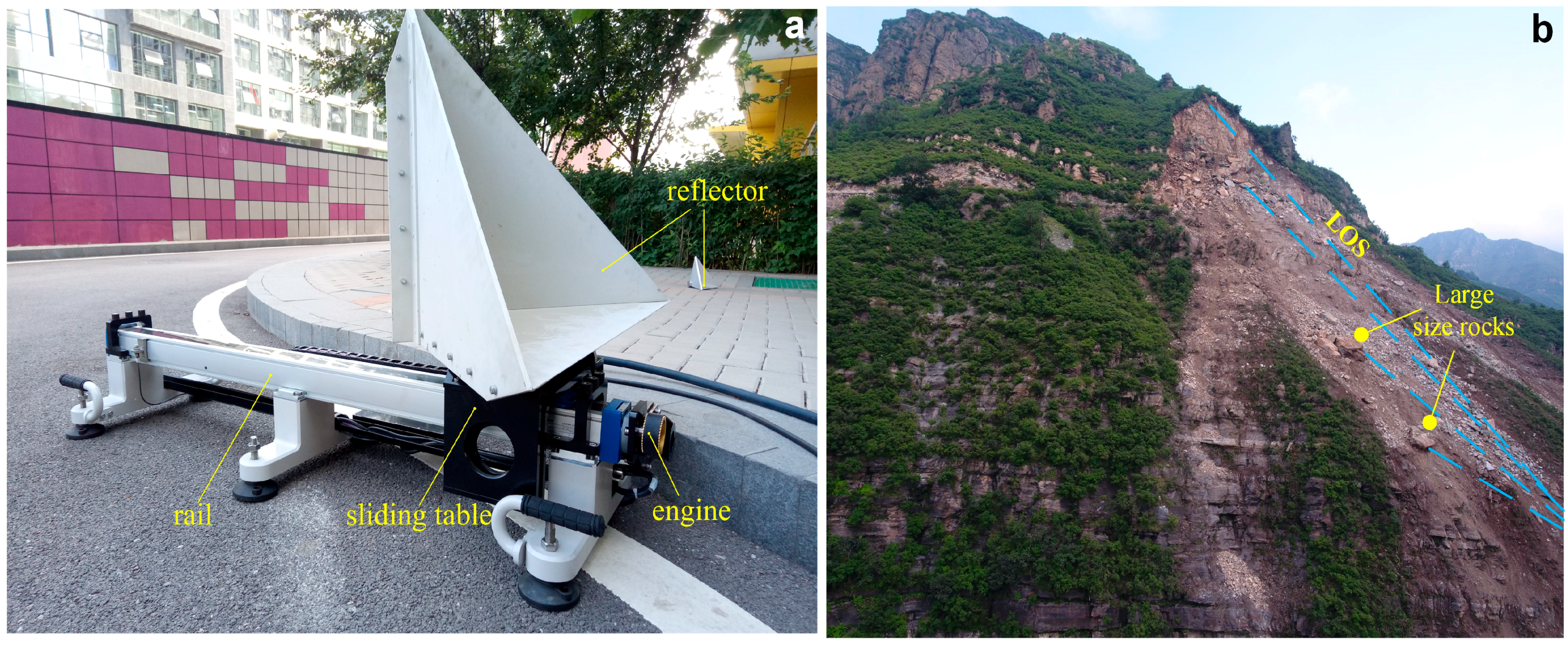
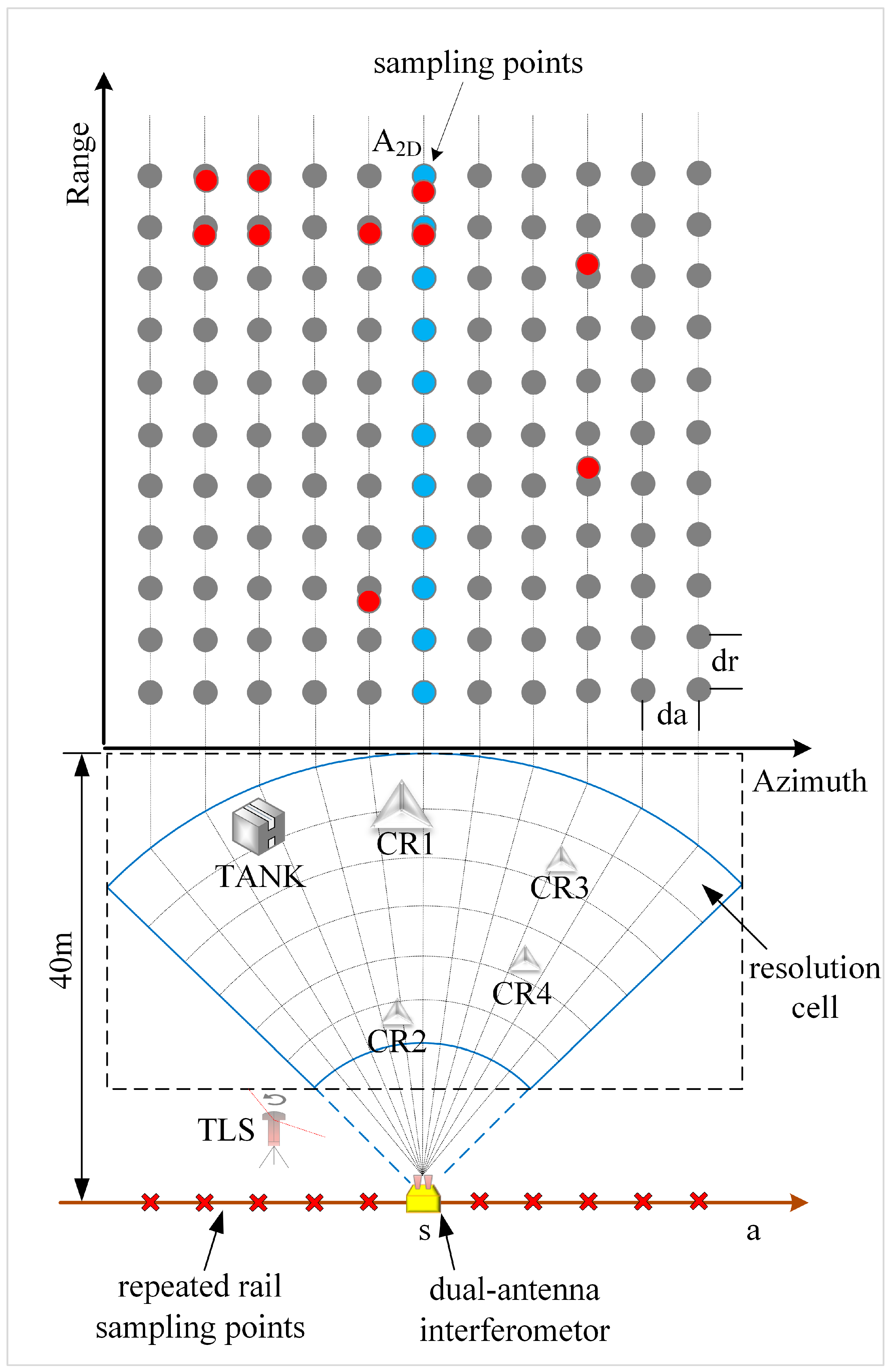
2. Experimental Scheme and Test Site
3. GB-SAR Working Mode and Interferometry
3.1. GB-SAR Zero-Baseline Interferometric Working Mode
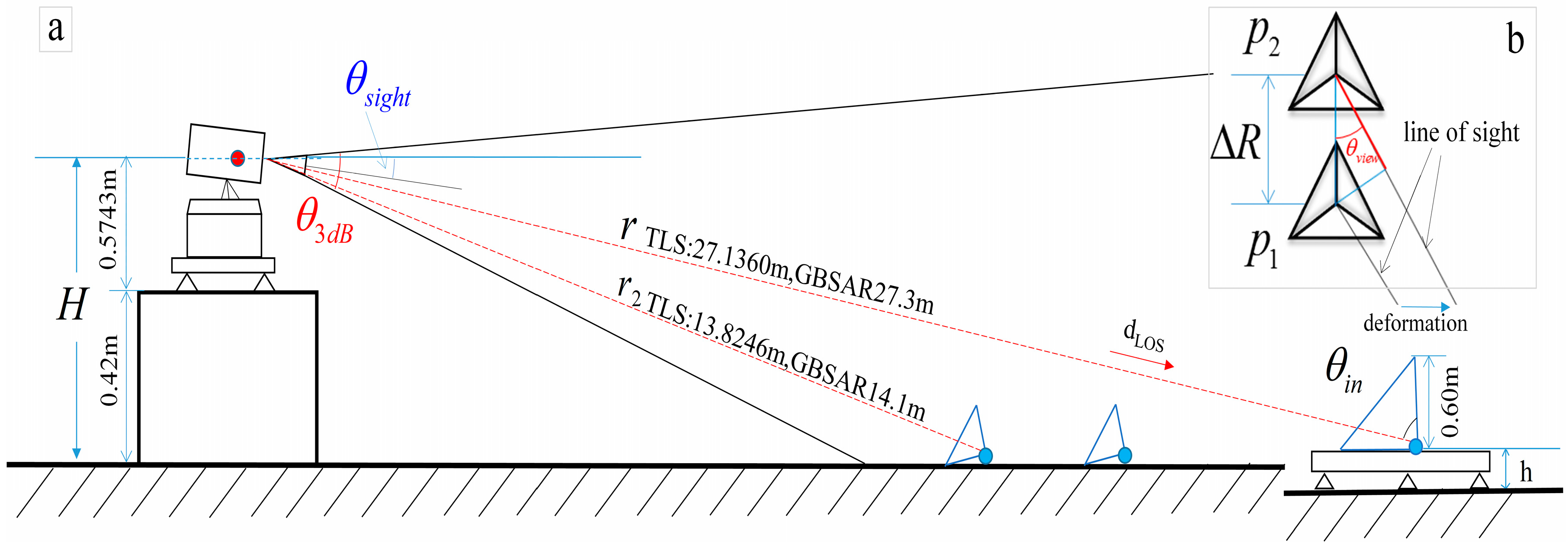
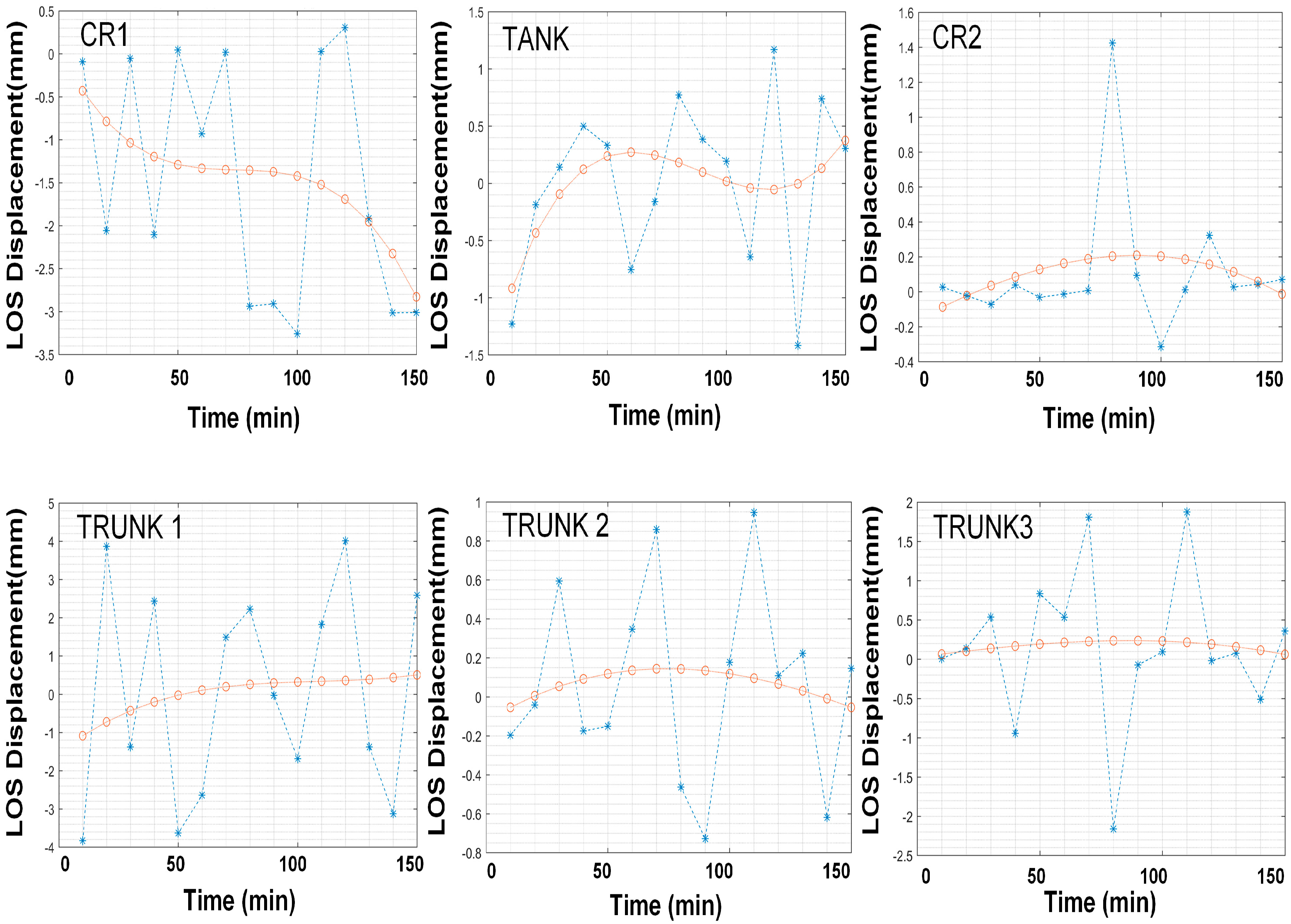
3.2. Experimental Displacement Extraction
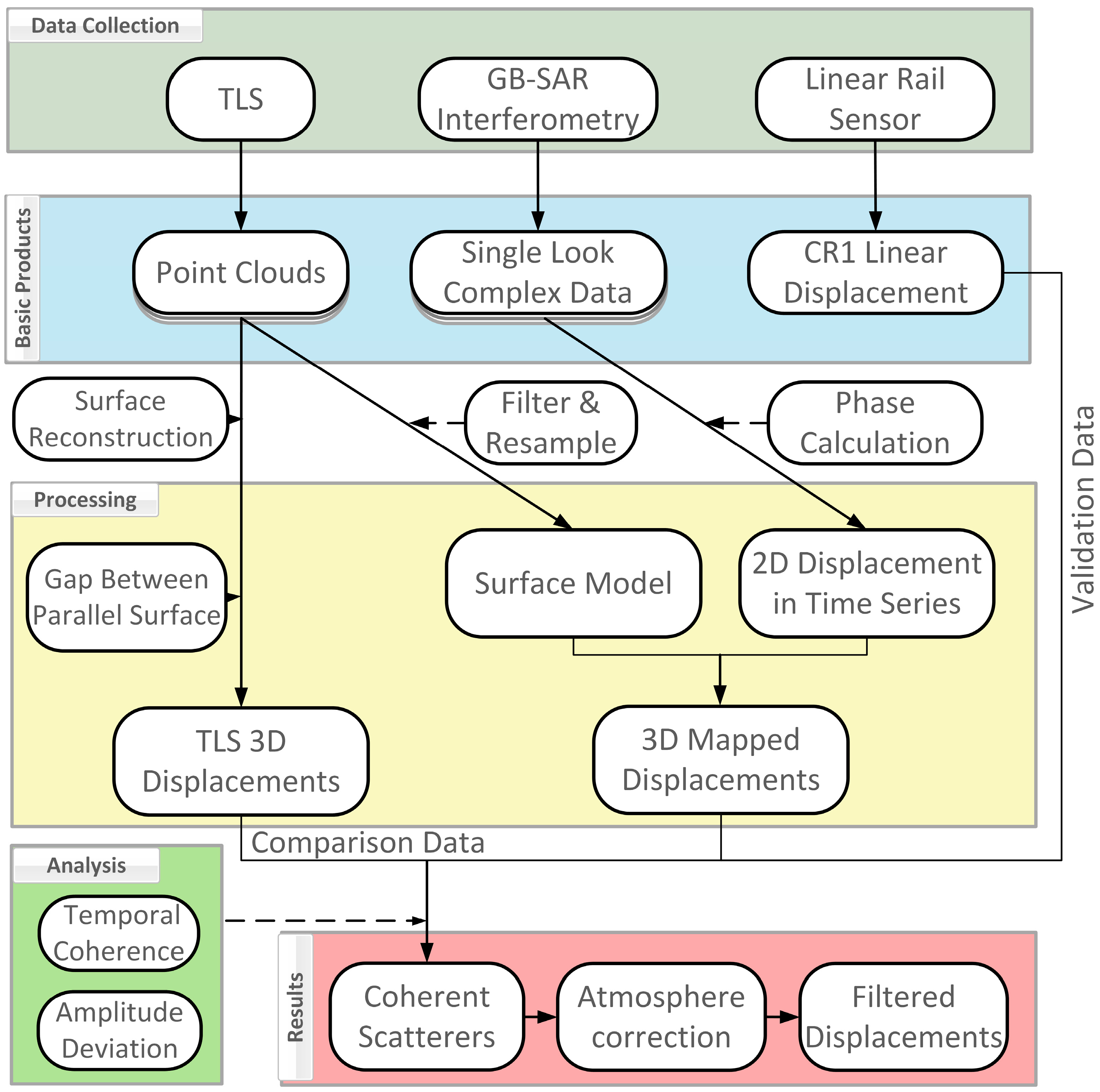
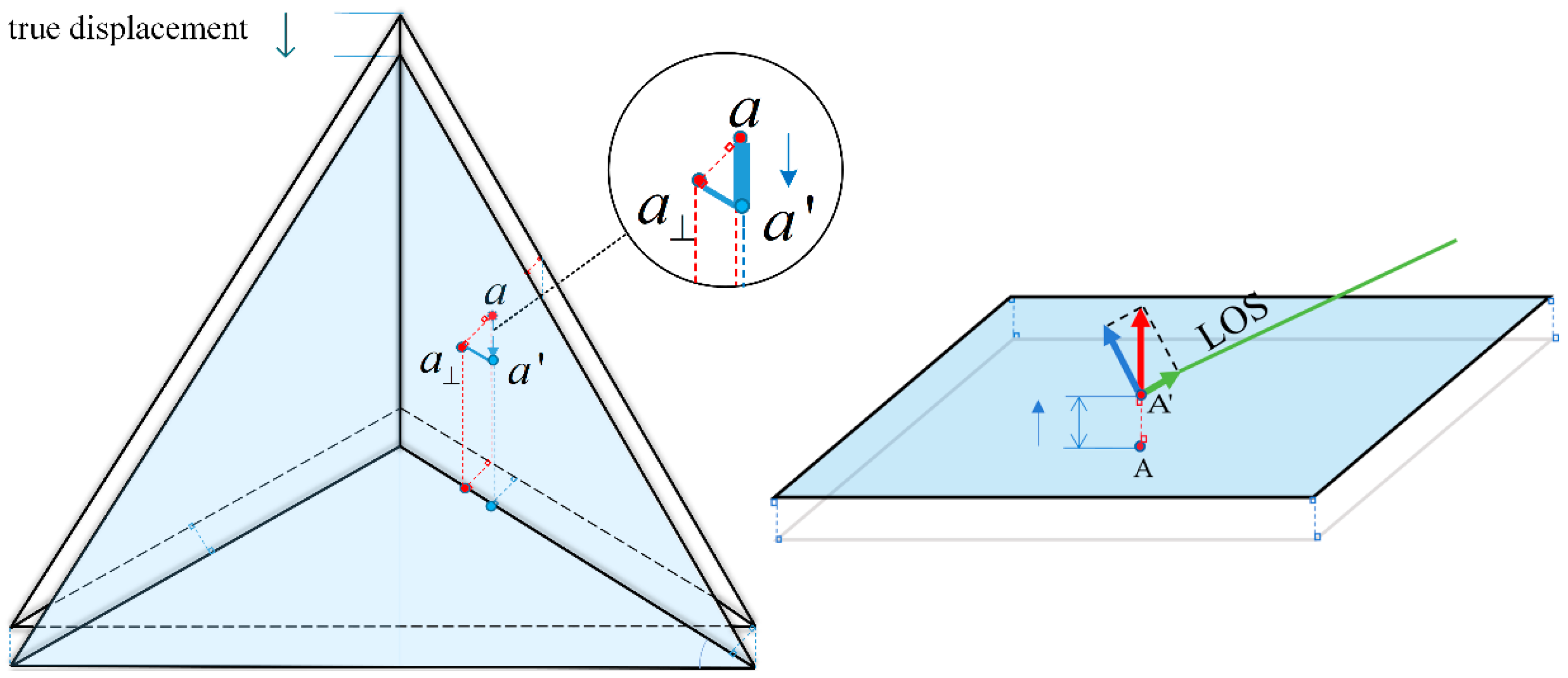
4. Geometric Mapping and GB-SAR Displacement Optimization
Geometric Mapping
- The fitted plane should go through the mean of the points set .
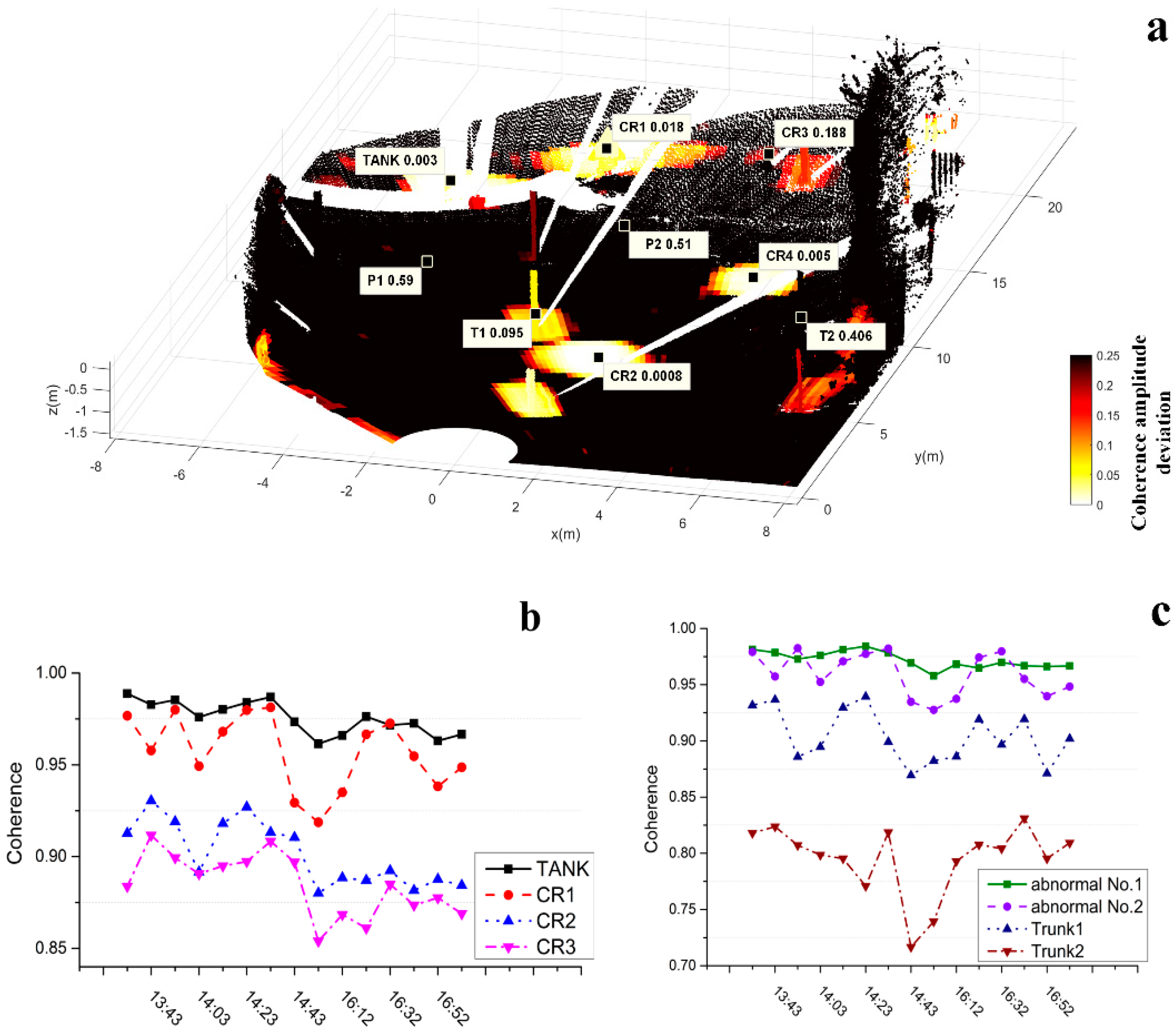
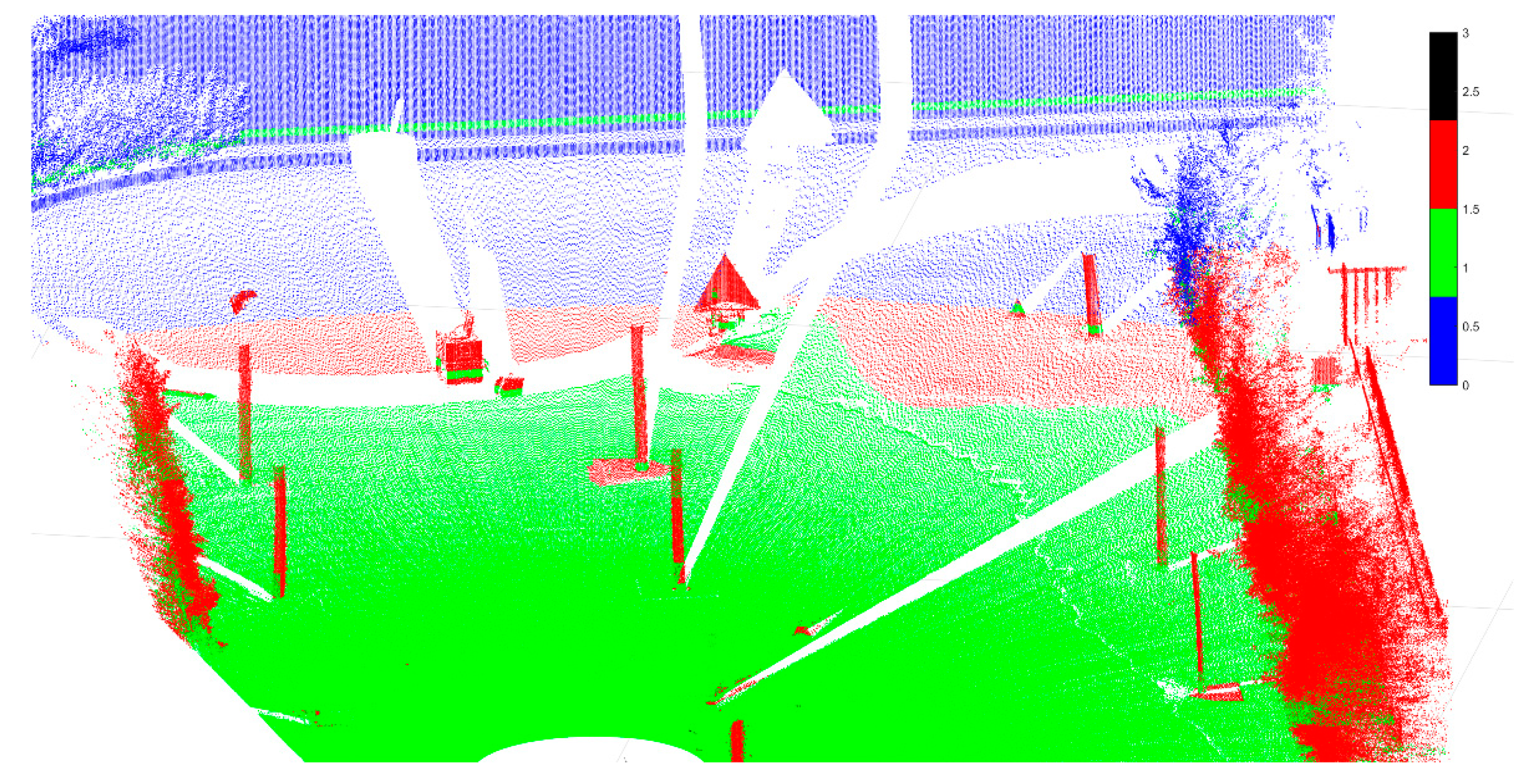
- The point set of CRs or floor tiles within abnormal areas is selected, denoted as Data.
- Subtract the point cloud data with the average point to form a centered plane.
- The centered plane is subjected to SVD to get U, Σ and VT. Um*m and V3*3 are unitary matrices, “T” represents transposition. Σ is a positive semi-definite diagonal matrix, the singular values are elements on the diagonal. MATLAB code is [U,Sigma,V] = svd(centeredplane).
- The smallest singular value corresponds to the direction of the most concentrated distribution of the point set, which is the normal vector direction of the plane.
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Qu, S.B. Methods on Regional Deformation Extraction Using Ground Based SAR; Institute of Electronics of Chinese Academy of Sciences: Beijing, China, 2010. [Google Scholar]
- Scaioni, M.; Roncoroni, F.; Alba, M.I.; Giussani, A.; Manieri, M. Ground-Based Real-Aperture Radar for Deformation Monitoring: Experimental Tests. In Proceedings of the Computational Science and Its Applications—ICCSA 2017 17th International Conference, Trieste, Italy, 3–6 July 2017. [Google Scholar] [CrossRef]
- Di Pasquale, A.; Nico, G.; Pitullo, A.; Prezioso, G. Monitoring Strategies of Earth Dams by Ground-Based Radar Interferometry: How to Extract Useful Information for Seismic Risk Assessment. Sensors 2018, 18, 244. [Google Scholar] [CrossRef] [PubMed]
- Yang, K.; Yan, L.; Huang, G.; Chen, C.; Wu, Z. Monitoring Building Deformation with Insar: Experiments and Validation. Sensors 2016, 16, 2182. [Google Scholar] [CrossRef] [PubMed]
- Intrieri, E.; Gigli, G.; Mugnai, F.; Fanti, R.; Casagli, N. Design and Implementation of a Landslide Early Warning System. Eng. Geol. 2012, 147, 124–136. [Google Scholar] [CrossRef]
- Qiu, Z.; Yue, J.; Wang, X. Application of Subsidence Monitoring over Yangtze River Marshland with Ground-Based Sar System IBIS. In Proceedings of the SPIE Optical Engineering + Applications 2014, San Diego, CA, USA, 23 September 2014. [Google Scholar]
- Luzi, G.; Pieraccini, M.; Mecatti, D.; Noferini, L.; Macaluso, G.; Tamburini, A.; Atzeni, C. Tamburini, Carlo Atzeni. Monitoring of an Alpine Glacier by Means of Ground-Based Sar Interferometry. IEEE Geosci. Remote Sens. Lett. 2007, 4, 495–499. [Google Scholar] [CrossRef]
- Tapete, D.; Casagli, N.; Luzi, G.; Fanti, R.; Gigli, G.; Leva, D. Integrating Radar and Laser-Based Remote Sensing Techniques for Monitoring Structural Deformation of Archaeological Monuments. J. Arch. Sci. 2013, 40, 176–189. [Google Scholar] [CrossRef]
- Zhang, B.; Ding, X.; Werner, C.; Tan, K.; Zhang, B.; Jiang, M.; Zhao, J.; Xu, Y. Dynamic Displacement Monitoring of Long-Span Bridges with a Microwave Radar Interferometer. ISPRS J. Photogramm. Remote Sens. 2018, 138, 252–264. [Google Scholar] [CrossRef]
- Zhao, Q.; Lin, H.; Jiang, L.; Chen, F.; Cheng, S. A Study of Ground Deformation in the Guangzhou Urban Area with Persistent Scatterer Interferometry. Sensors 2009, 9, 503–518. [Google Scholar] [CrossRef] [Green Version]
- Massonnet, D.; Feigl, K.; Rossi, M.; Adragna, F. Radar Interferometric Mapping of Deformation in the Year after the Landers Earthquake. Nature 1994, 369, 227–230. [Google Scholar] [CrossRef]
- Martinez-Vazquez, A.; Fortuny-Guasch, J. A GB-SAR Processor for Snow Avalanche Identification. IEEE Trans. Geosci.Remote Sens. Lett. 2008, 46, 3948–3956. [Google Scholar] [CrossRef]
- Jiang, M.; Ding, X.; Li, Z.; Tian, X.; Wang, C.; Zhu, W. INSAR Coherence Estimation for Small Data Sets and Its Impact on Temporal Decorrelation Extraction. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6584–6596. [Google Scholar] [CrossRef]
- Qu, S.B. Deformation Detection Error Analysis and Experiment Using Ground Based Sar. J. Electron. Inf. Technol. 2011, 33, 1–7. [Google Scholar] [CrossRef]
- Tarchi, D.; Casagli, N.; Fanti, R.; Leva, D.D.; Luzi, G.; Pasuto, A.; Pieraccini, M.; Silvano, S. Landslide Monitoring by Using Ground-Based Sar Interferometry: An Example of Application to the Tessina Landslide in Italy. Eng. Geol. 2003, 68, 15–30. [Google Scholar] [CrossRef]
- Pieraccini, M.; Casagli, N.; Luzi, G.; Tarchi, D.; Mecatti, D.; Noferini, L.; Atzeni, C. Landslide Monitoring by Ground-Based Radar Interferometry: A Field Test in Valdarno (Italy). Int. J. Remote Sens. 2003, 24, 1385–1391. [Google Scholar] [CrossRef]
- Pieraccini, M.; Noferini, L.; Mecatti, D.; Atzeni, C.; Teza, G.; Galgaro, A.; Zaltron, N. Integration of Radar Interferometry and Laser Scanning for Remote Monitoring of an Urban Site Built on a Sliding Slope. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2335–2342. [Google Scholar] [CrossRef]
- Lombardi, L.; Nocentini, M.; Frodella, W.; Nolesini, T.; Bardi, F.; Intrieri, E.; Carlà, T.; Solari, L.; Dotta, G.; Ferrigno, F.; et al. The Calatabiano Landslide (Southern Italy): Preliminary Gb-InSAR Monitoring Data and Remote 3D Mapping. Landslides 2017, 14, 685–696. [Google Scholar] [CrossRef]
- Lingua, A.; Piatti, D.; Rinaudo, F. Remote Monitoring of a Landslide Using an Integration of GB-INSAR and Lidar Techniques. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Beijing, China, 3–11 July 2008. [Google Scholar]
- Qu, S.; Wang, Y.; Tan, W.; Hong, W. GB-SAR Experiment on Deformation Extraction and System Error Analysis. In Proceedings of the Symposium Dragon 2 Programme Mid-Term Results 2008–2010, Guilin, China, 17–21 May 2010. [Google Scholar]
- Yang, X.; Wang, Y.; Qi, Y.; Tan, W.; Hong, W. Experiment Study on Deformation Monitoring Using Ground-Based SAR. In Proceedings of the Synthetic Aperture Radar 2014, Tsukuba, Japan, 23–27 September 2013. [Google Scholar]
- Nico, G.; Cifarelli, G.; Miccoli, G.; Soccodato, F.; Feng, W.; Sato, M.; Miliziano, S.; Marini, M. Measurement of Pier Deformation Patterns by Ground-Based Sar Interferometry: Application to a Bollard Pull Trial. IEEE J. Ocean. Eng. 2018, 43, 822–829. [Google Scholar] [CrossRef]
- Luzi, G.; Pieraccini, M.; Mecatti, D.; Noferini, L.; Guidi, G.; Moia, F.; Atzeni, C. Ground-Based Radar Interferometry for Landslides Monitoring: Atmospheric and Instrumental Decorrelation Sources on Experimental Data. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2454–2466. [Google Scholar] [CrossRef]
- CCTV10. Approaching Science the Eyes Keep on the Slope. 2017. Available online: http://tv.cctv.com/2017/12/25/VIDEb2nBYFz3De4iY126TXwO171225.shtml (accessed on 25 December 2017).
- RIEGL Laser Measurement Systems GMBH. Available online: http://www.riegl.com/ (accessed on 25 December 2017).
- Li, C.; Yin, J.; Zhao, J.; Zhang, G.; Shan, X. The Selection of Artificial Corner Reflectors Based on RCS Analysis. Acta Geophys. 2012, 60, 43–58. [Google Scholar] [CrossRef]
- Skolnik, M. Radar Handbook, 3rd ed.; The McGrawHill Companies, Inc.: New York, NY, USA, 2008. [Google Scholar]
- Qi, Y.; Yang, X.; Wang, Y.; Tan, W.; Hong, W. Calibration and Fusion of SAR and DEM in Deformation Monitoring Applications. In Proceedings of the Eusar 2014, European Conference on Synthetic Aperture Radar, Berlin, Germany, 3–5 June 2014. [Google Scholar]
- Noferini, L.; Pieraccini, M.; Mecatti, D.; Luzi, G.; Atzeni, C.; Tamburini, A.; Broccolato, M. Permanent Scatterers Analysis for Atmospheric Correction in Ground-Based SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1459–1471. [Google Scholar] [CrossRef]
- Hong, F.; Wang, R.; Zhang, Z.; Zhang, H.; Li, N.; Leng, Y. Interferogram Denoising Using an Iteratively Refined Nonlocal InSAR Filter. Remote Sens. Lett. 2017, 8, 897–906. [Google Scholar] [CrossRef]
- Yang, H.; Xu, X.; Neumann, I. The Benefit of 3D Laser Scanning Technology in the Generation and Calibration of Fem Models for Health Assessment of Concrete Structures. Sensors 2014, 14, 21889–21904. [Google Scholar] [CrossRef] [PubMed]
- Preweda, E. The Use of Decomposition SVD to Approximate a Surface. In Proceedings of the Environmental Engineering International Conference 2017, Jeju, Korea, 15–17 November 2017. [Google Scholar]
- Austin, D. We Recommend a Singular Value Decomposition. 2015. Available online: http://www.ams.org/publicoutreach/feature-column/fcarc-svd (accessed on 25 December 2017).
- Li, L.; Yang, F.; Zhu, H.; Li, D.; Li, Y.; Tang, L. An Improved Ransac for 3D Point Cloud Plane Segmentation Based on Normal Distribution Transformation Cells. Remote Sens. 2017, 9, 433. [Google Scholar] [CrossRef]
- Dick, G.J.; Eberhardt, E.; Cabrejo-Liévano, A.G.; Stead, D.; Rose, N.D. Development of an Early-Warning Time-of-Failure Analysis Methodology for Open-Pit Mine Slopes Utilizing Ground-Based Slope Stability Radar Monitoring Data. Can. Geotech. J. 2014, 52, 515–529. [Google Scholar] [CrossRef]
- Tarchi, D.; Antonello, G.; Casagli, N.; Farina, P.; Fortuny-Guasch, J.; Guerri, L.; Leva, D. On the Use of Ground-Based SAR Interferometry for Slope Failure Early Warning: The Cortenova Rock Slide (Italy). In Landslides: Risk Analysis and Sustainable Disaster Management; Sassa, K., Fukuoka, H., Wang, F., Wang, G., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 337–342. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Preference | Description |
|---|---|---|
| Positional accuracy | 0.1 mm | Positional deviation determined by sensor |
| Precision | 0.1 mm | Position deviation under constant conditions |
| Displacement accuracy | ≥1 mm | Minimum rail displacement |
| Sliding table load | ≤25 kg |
| Characters | Value |
|---|---|
| Radar center frequency fc | 17.25 GHz |
| Radar bandwidth B | 500 MHz |
| Synthetic aperture length Ls | 1 m |
| Linear scansion point number N | 126 |
| Antenna gain | 0 dB |
| Transmitted power | 33 dBm |
| Polarization | VV |
| Target distance | 0–40 m |
| Measuring time per image | 10 min |
| Number of transmitted frequencies K | 10,001 |
| Time | GB-SAR Displacement at p1/mm | TLS Displacement at p1/mm | GB-SAR Displacement at p2/mm | TLS Displacement at p2/mm |
|---|---|---|---|---|
| 16:52 | −3.0289 mm | 0.392 mm | 2.479 | 0.239 |
| 17:02 | 2.039 mm | 0.013 mm | 2.405 | 0.336 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, X.; Yang, X.; Ma, H.; Ren, G.; Zhang, K.; Yang, F.; Li, C. Integrated Ground-Based SAR Interferometry, Terrestrial Laser Scanner, and Corner Reflector Deformation Experiments. Sensors 2018, 18, 4401. https://doi.org/10.3390/s18124401
Zheng X, Yang X, Ma H, Ren G, Zhang K, Yang F, Li C. Integrated Ground-Based SAR Interferometry, Terrestrial Laser Scanner, and Corner Reflector Deformation Experiments. Sensors. 2018; 18(12):4401. https://doi.org/10.3390/s18124401
Chicago/Turabian StyleZheng, Xiangtian, Xiaolin Yang, Haitao Ma, Guiwen Ren, Keli Zhang, Feng Yang, and Ce Li. 2018. "Integrated Ground-Based SAR Interferometry, Terrestrial Laser Scanner, and Corner Reflector Deformation Experiments" Sensors 18, no. 12: 4401. https://doi.org/10.3390/s18124401