A Novel Ship Detection Method Based on Gradient and Integral Feature for Single-Polarization Synthetic Aperture Radar Imagery

 , ,
, ,
Abstract
:1. Introduction
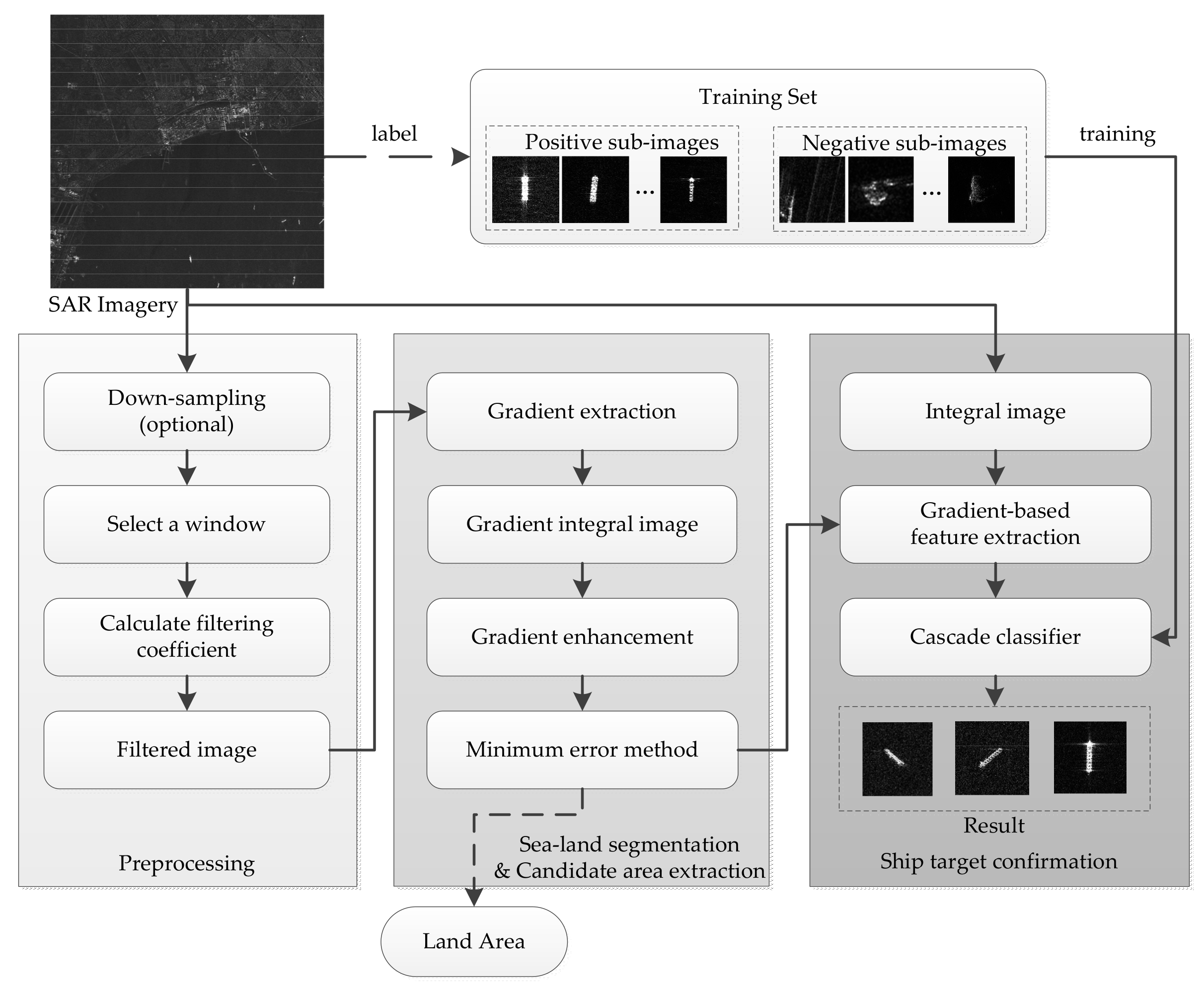
2. Preprocessing of SAR Imagery
3. Ship Target Detection and Identification
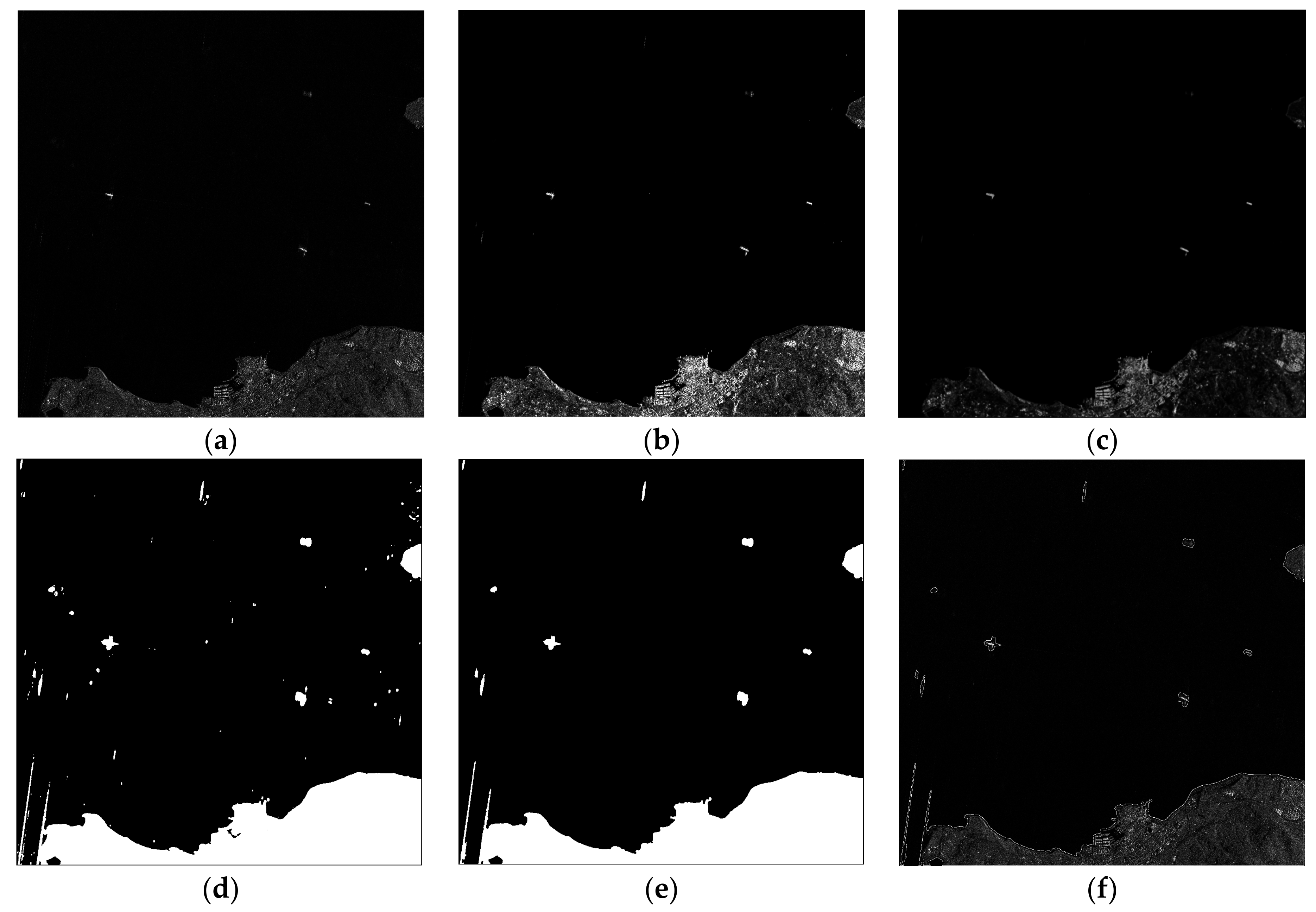
3.1. Sea-Land Segmentation and Candidate Areas Extraction
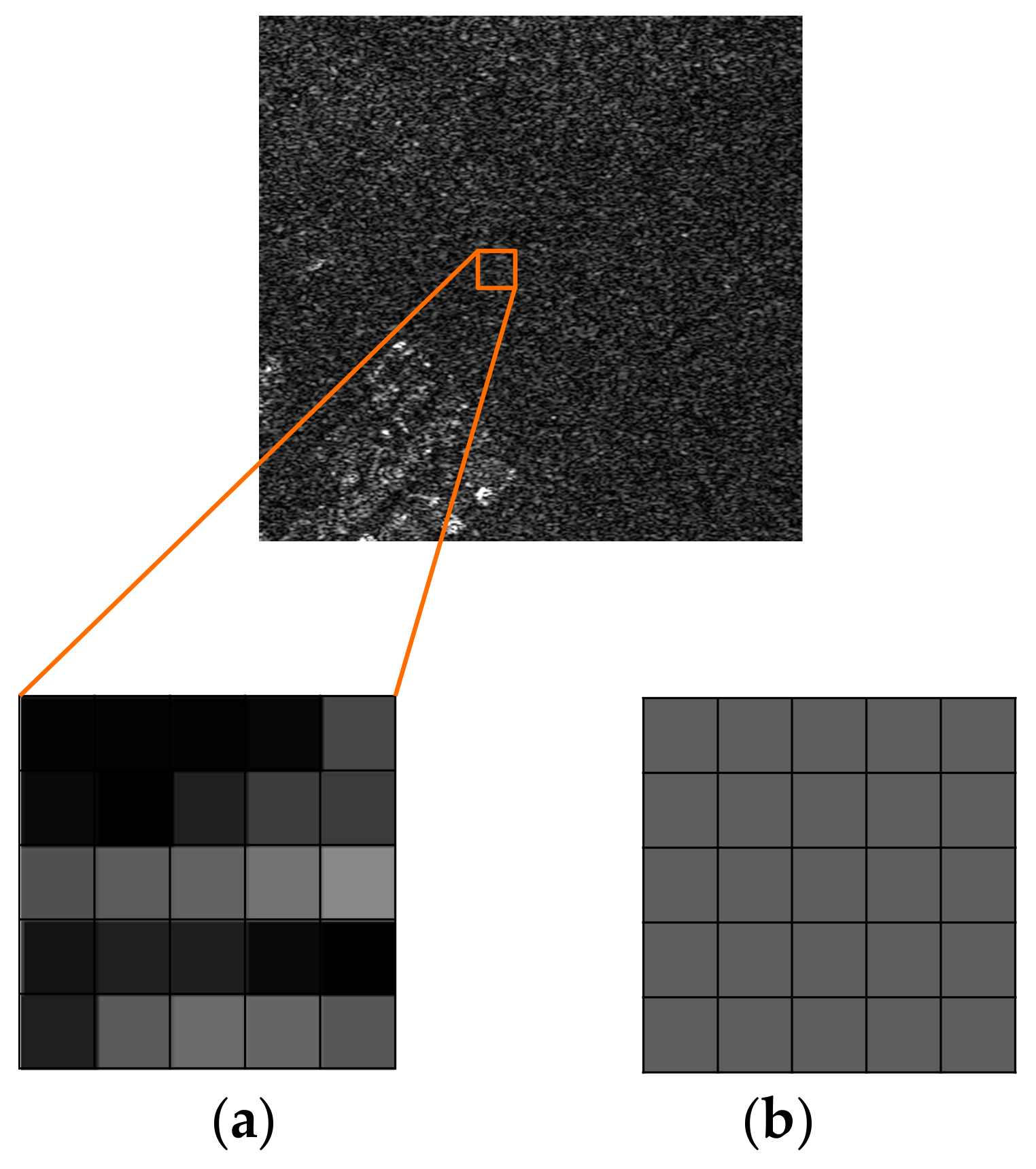
3.1.1. Gradient Extraction
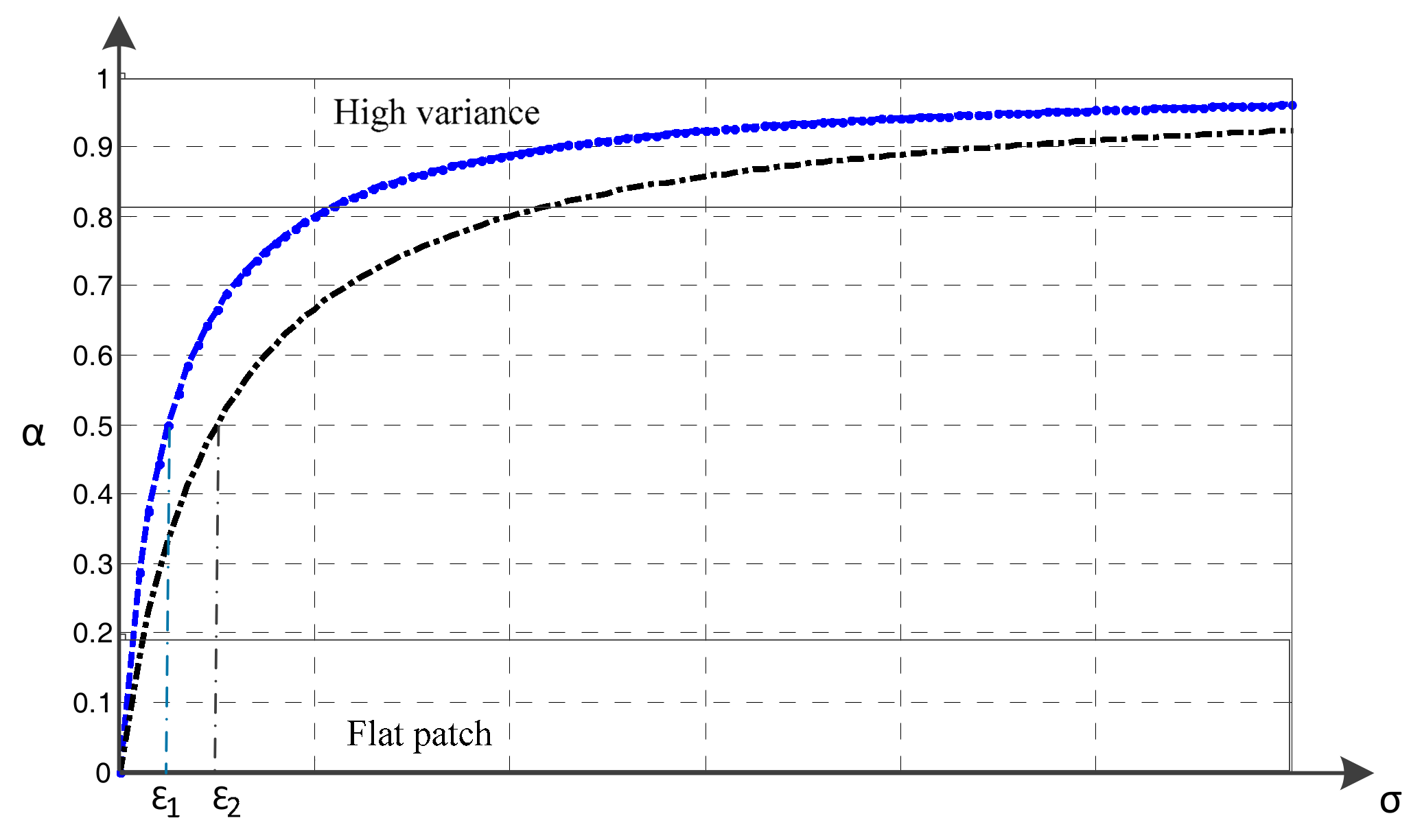
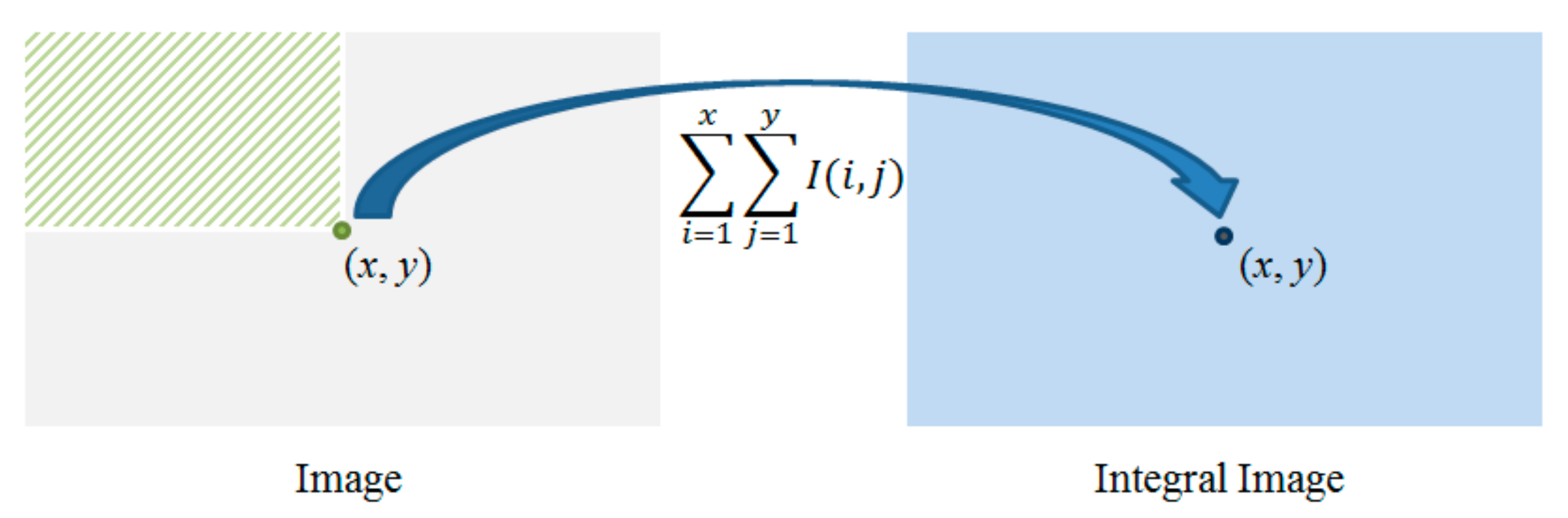
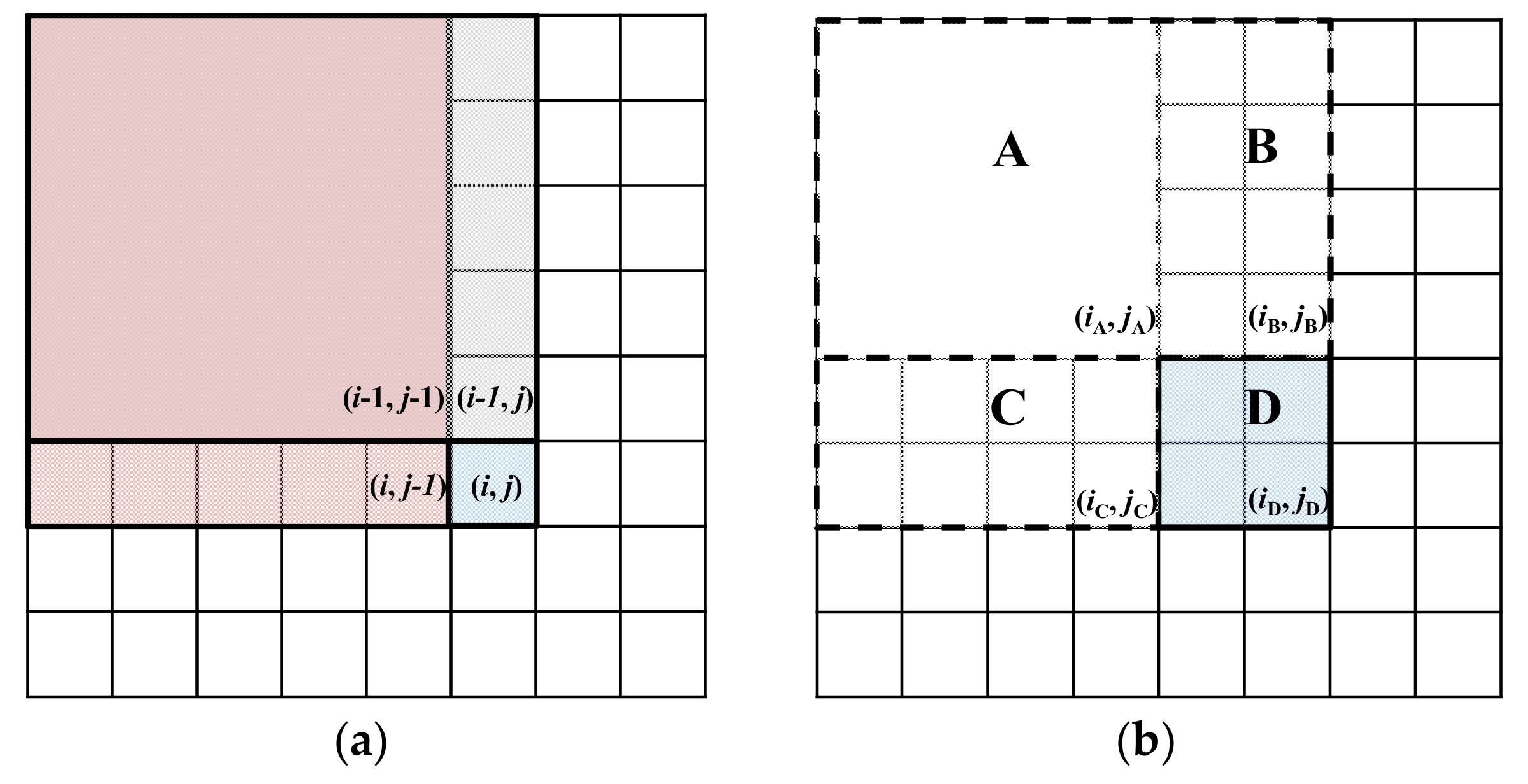
3.1.2. Gradient Enhancement and Integral Graph
3.1.3. Candidate Areas Extraction
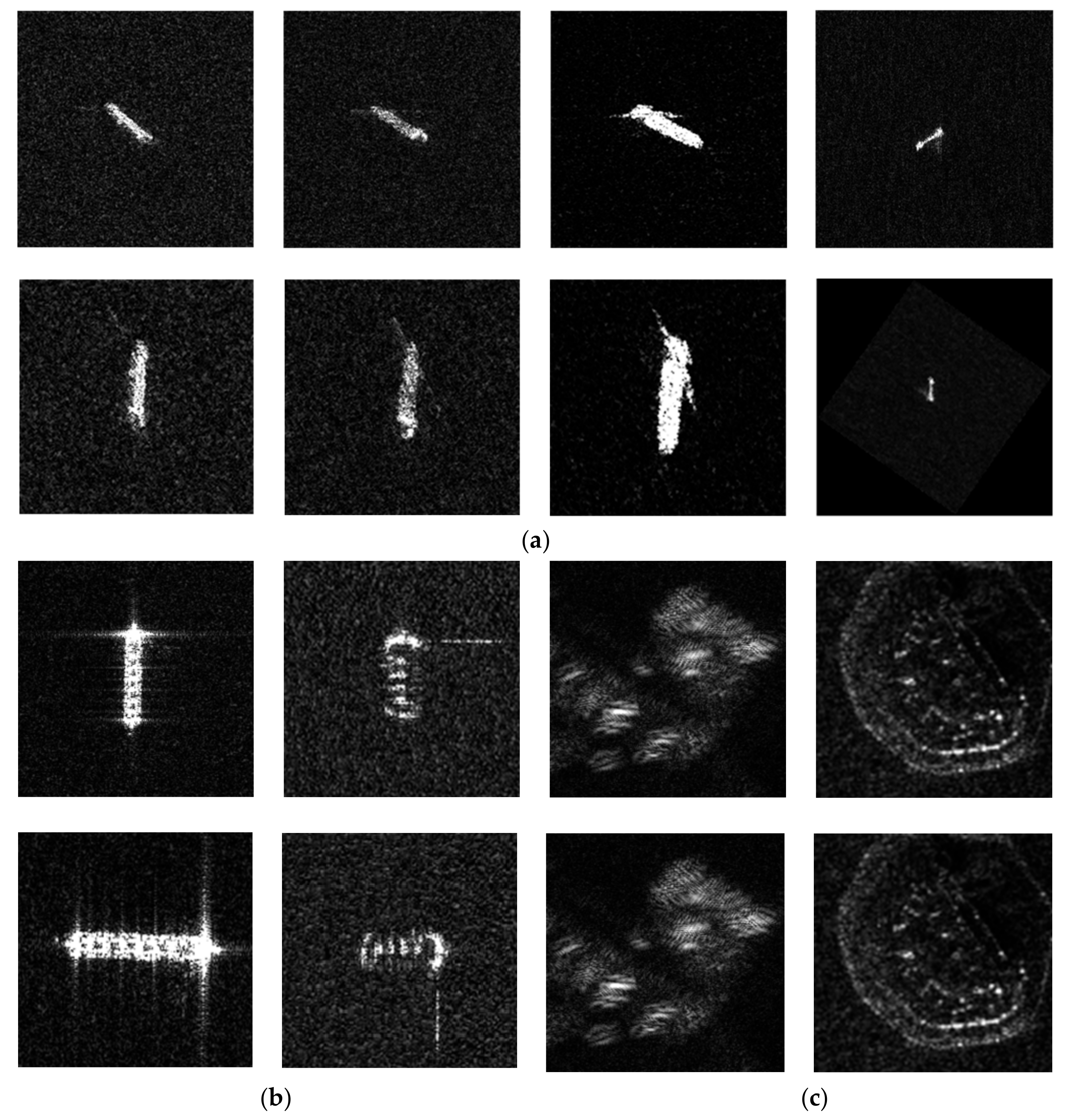
3.2. Ship Target Identification
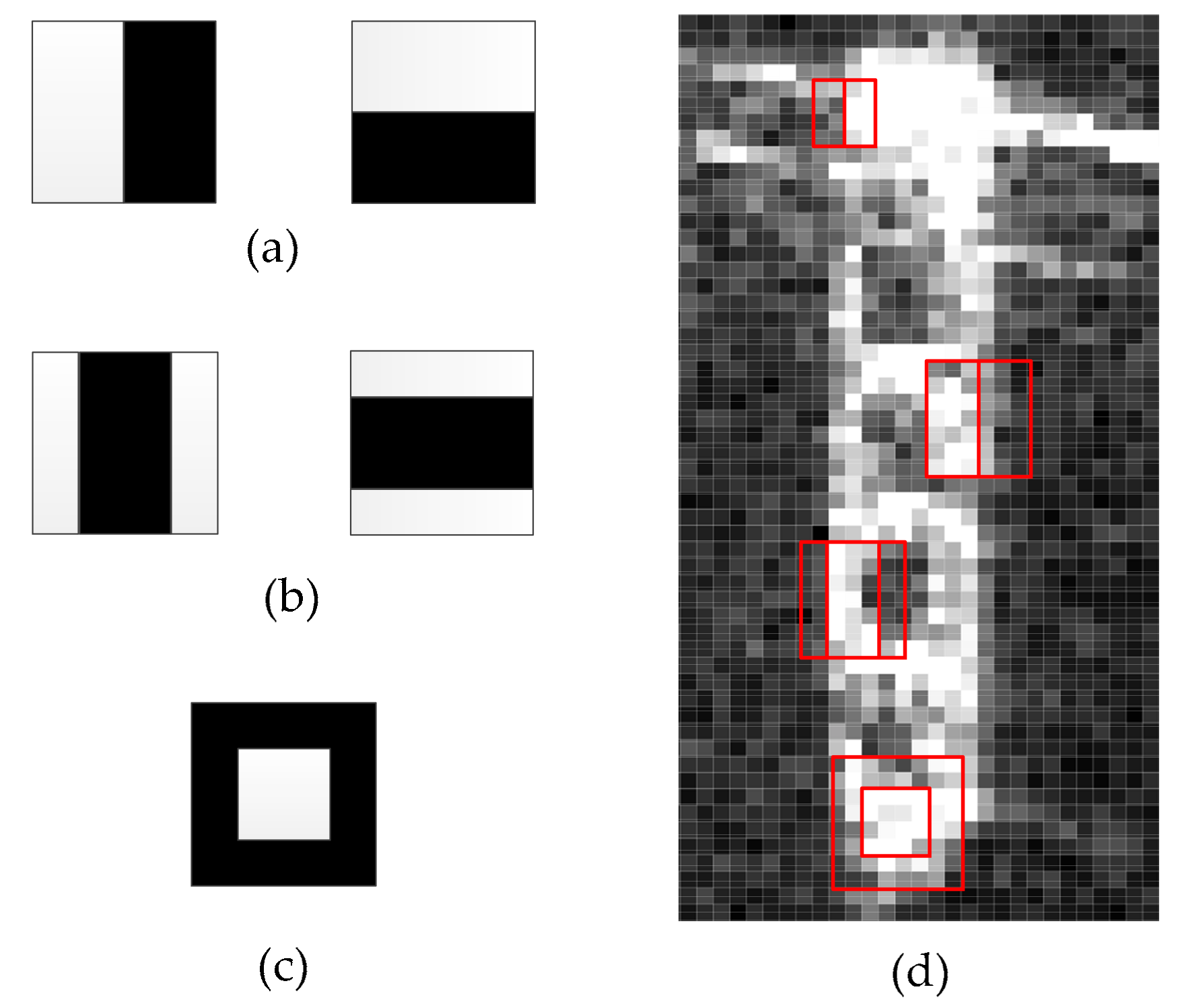
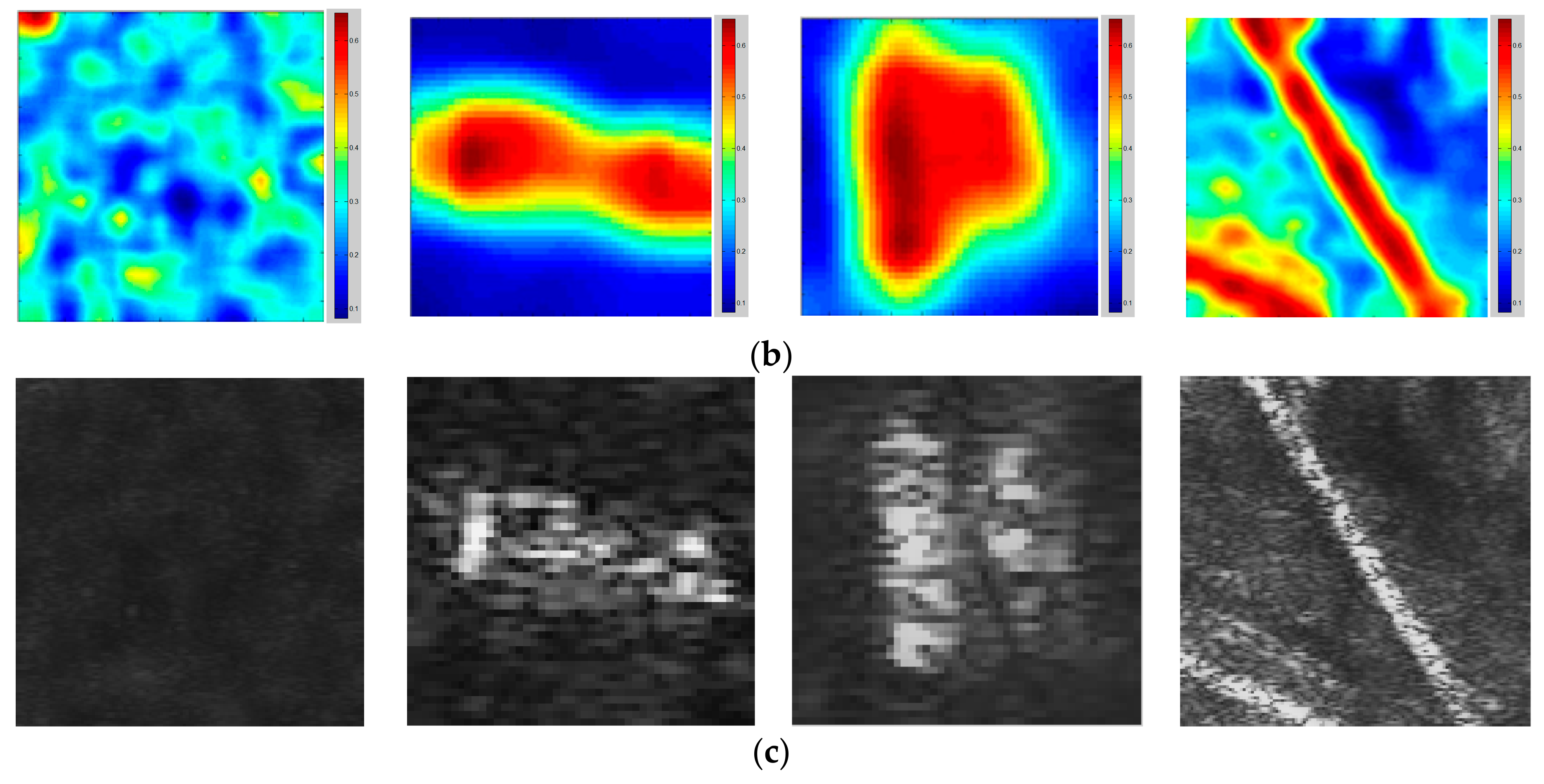
3.2.1. Haar-Like Feature Optimized
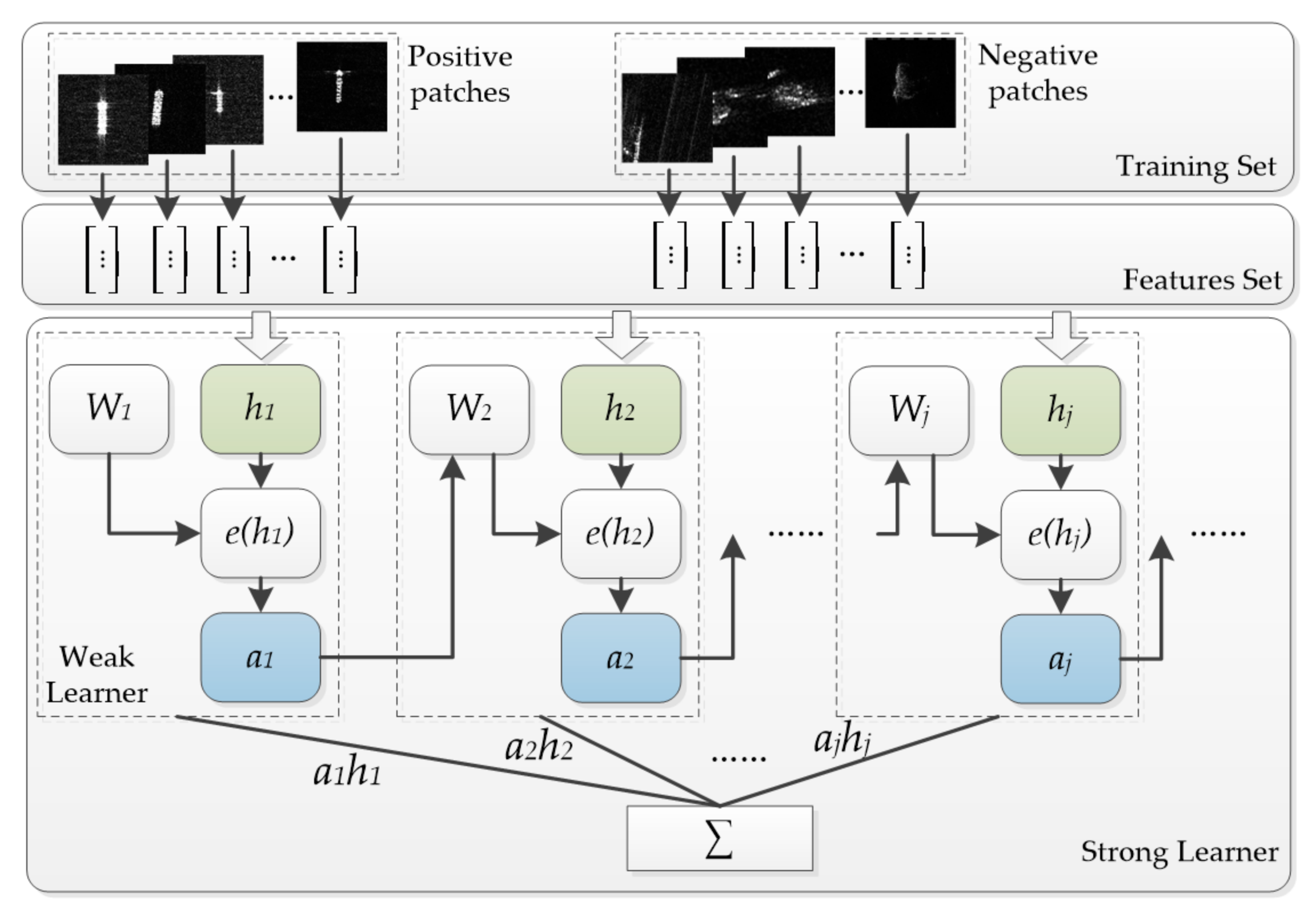
3.2.2. Target Identification Based on Cascade Classifier
4. Experiments and Results
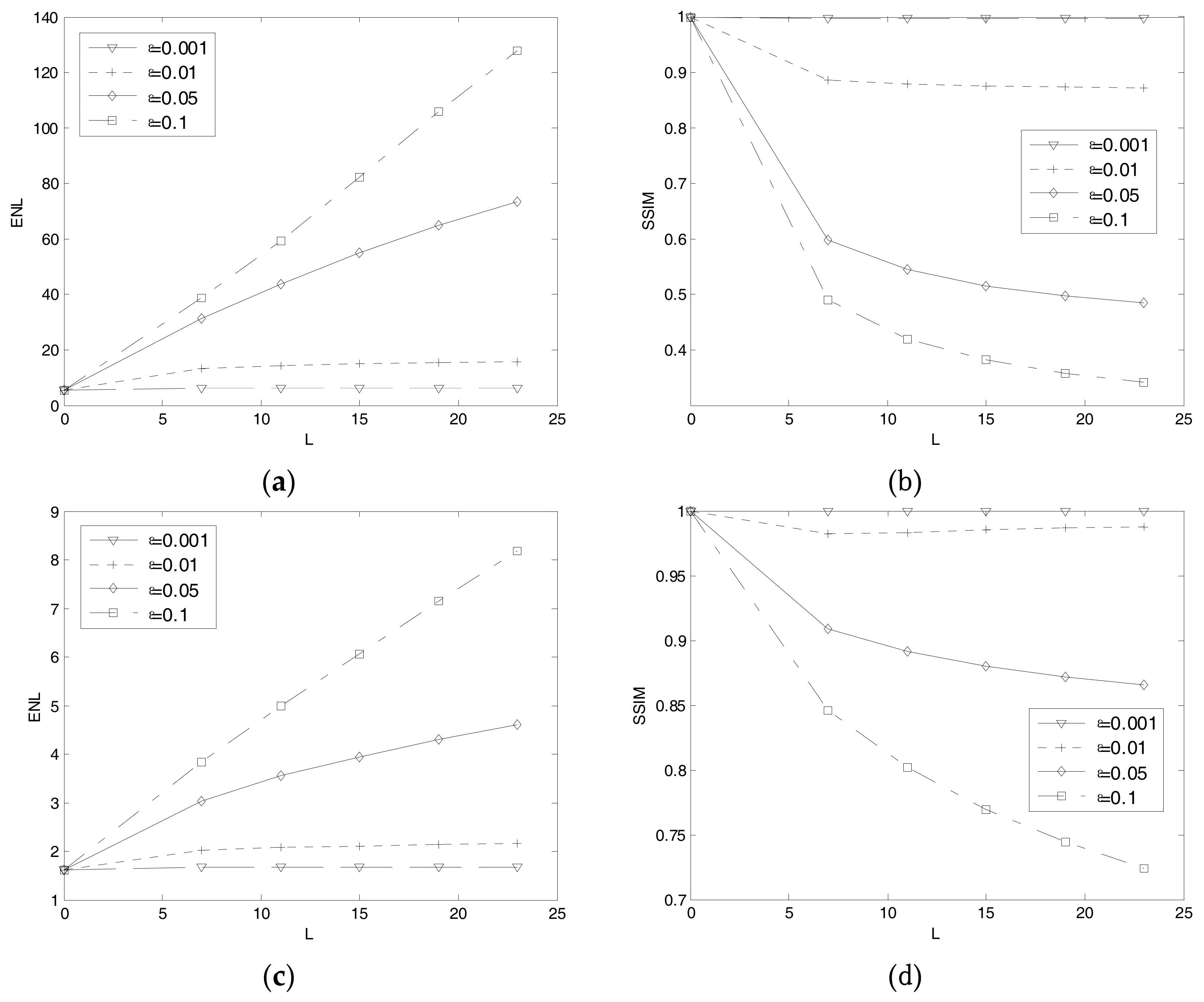
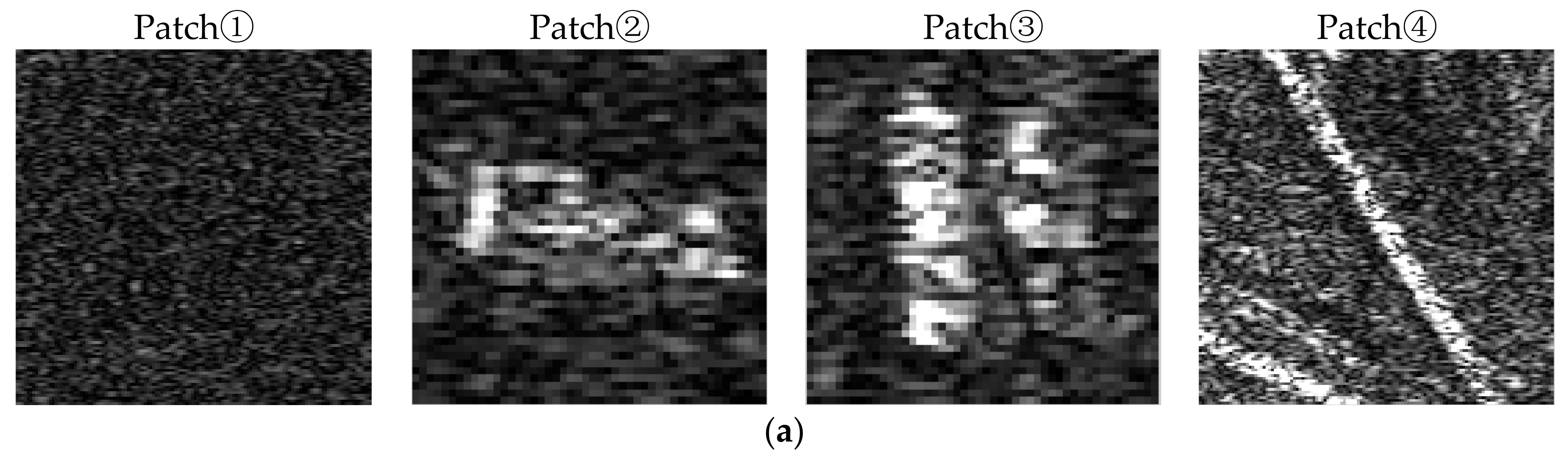
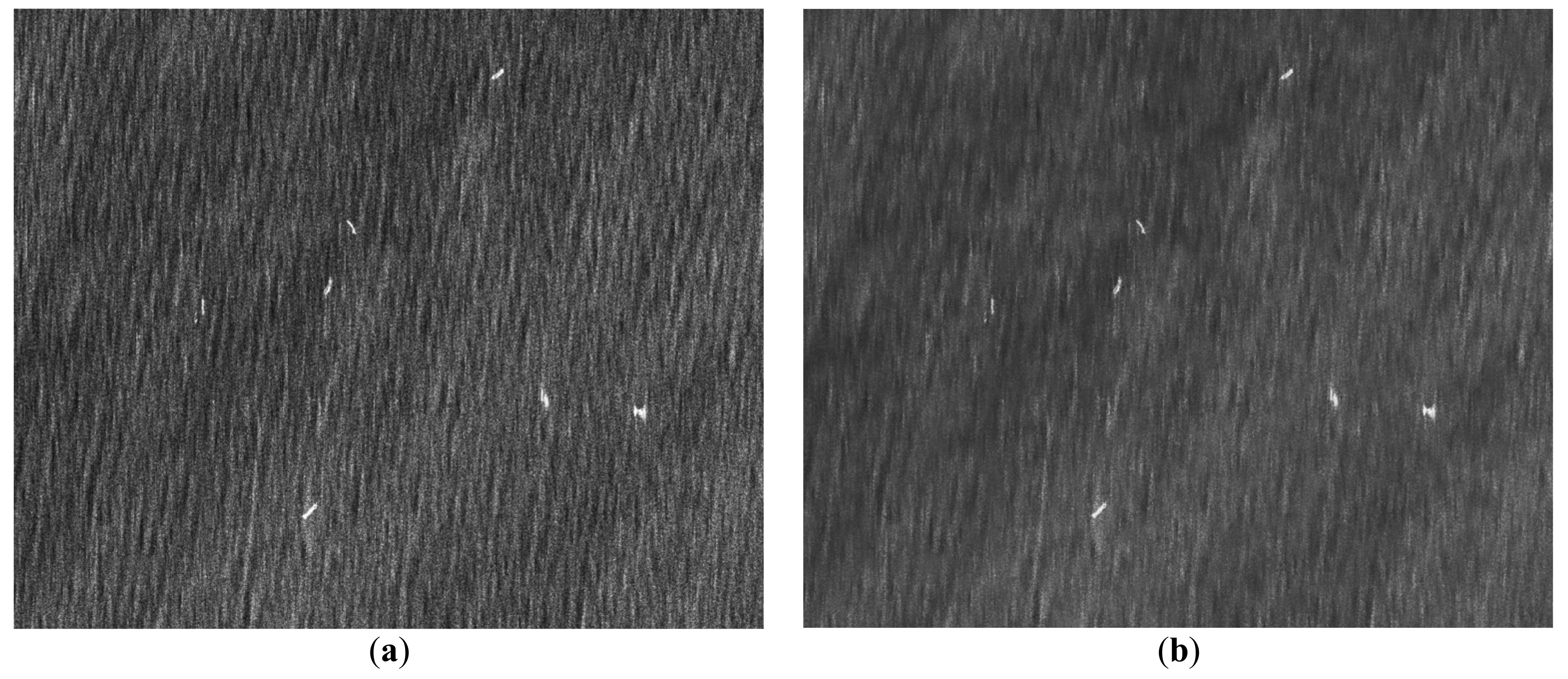
4.1. Experiment of Noise Reduction
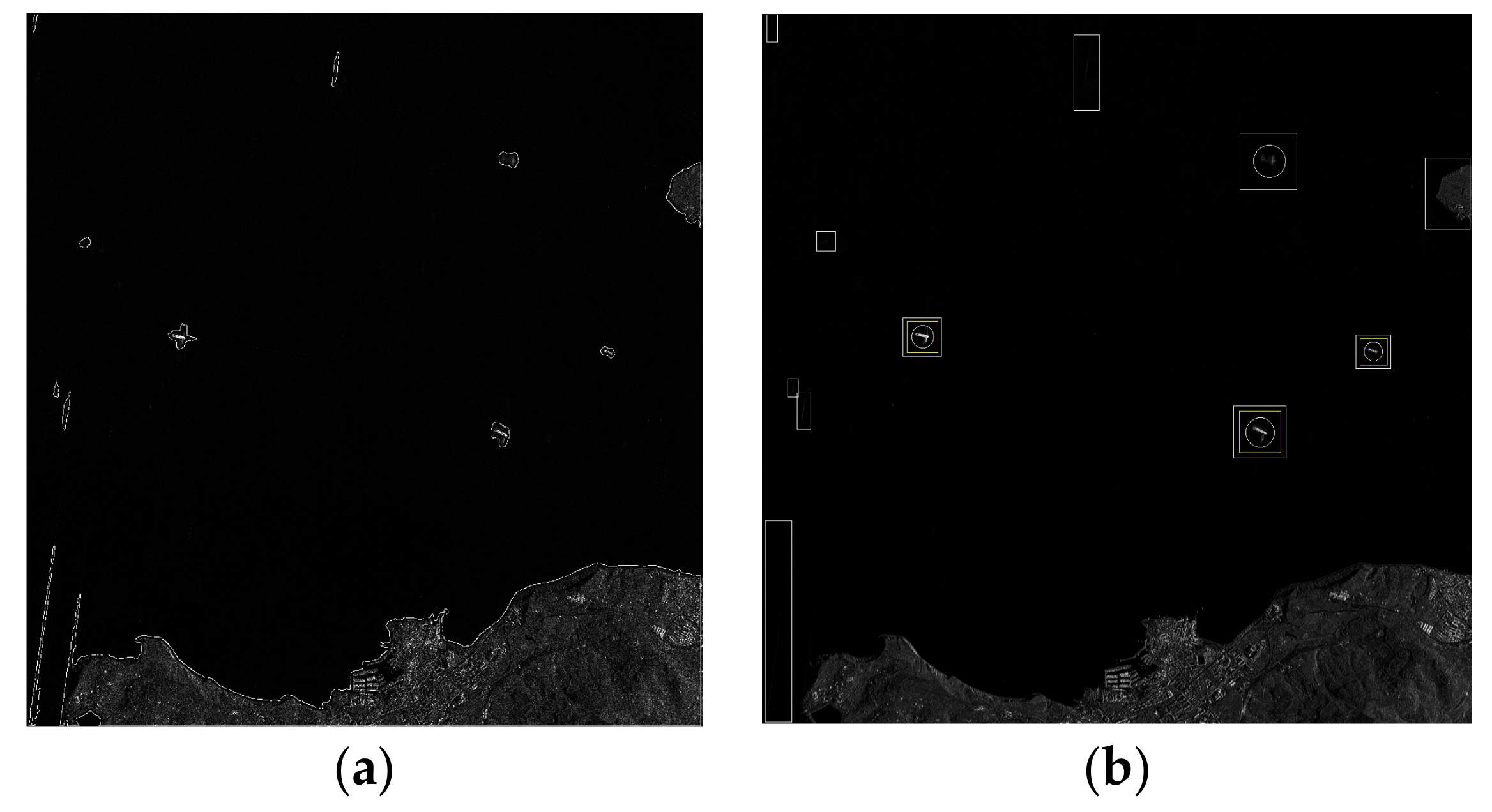
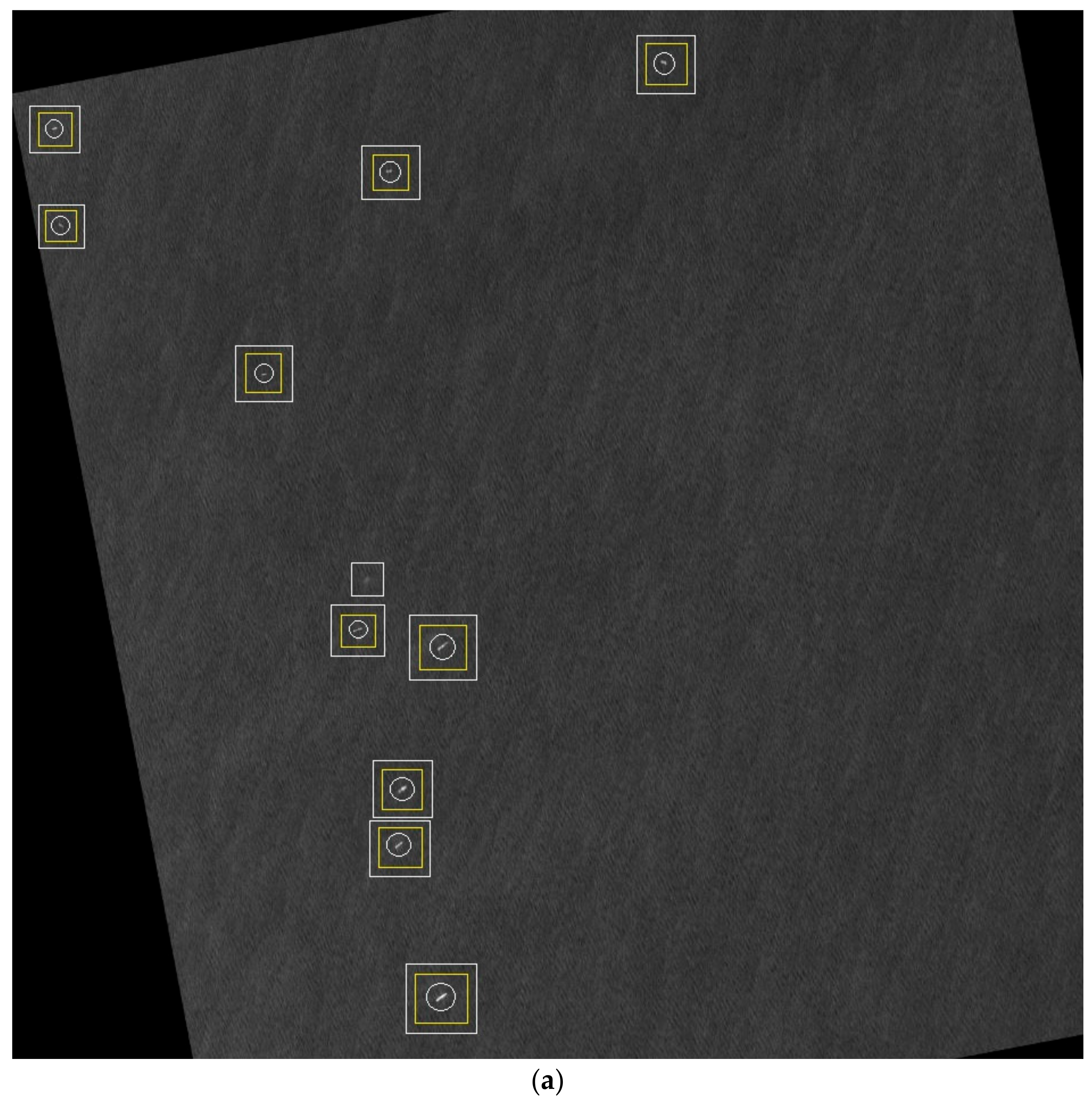
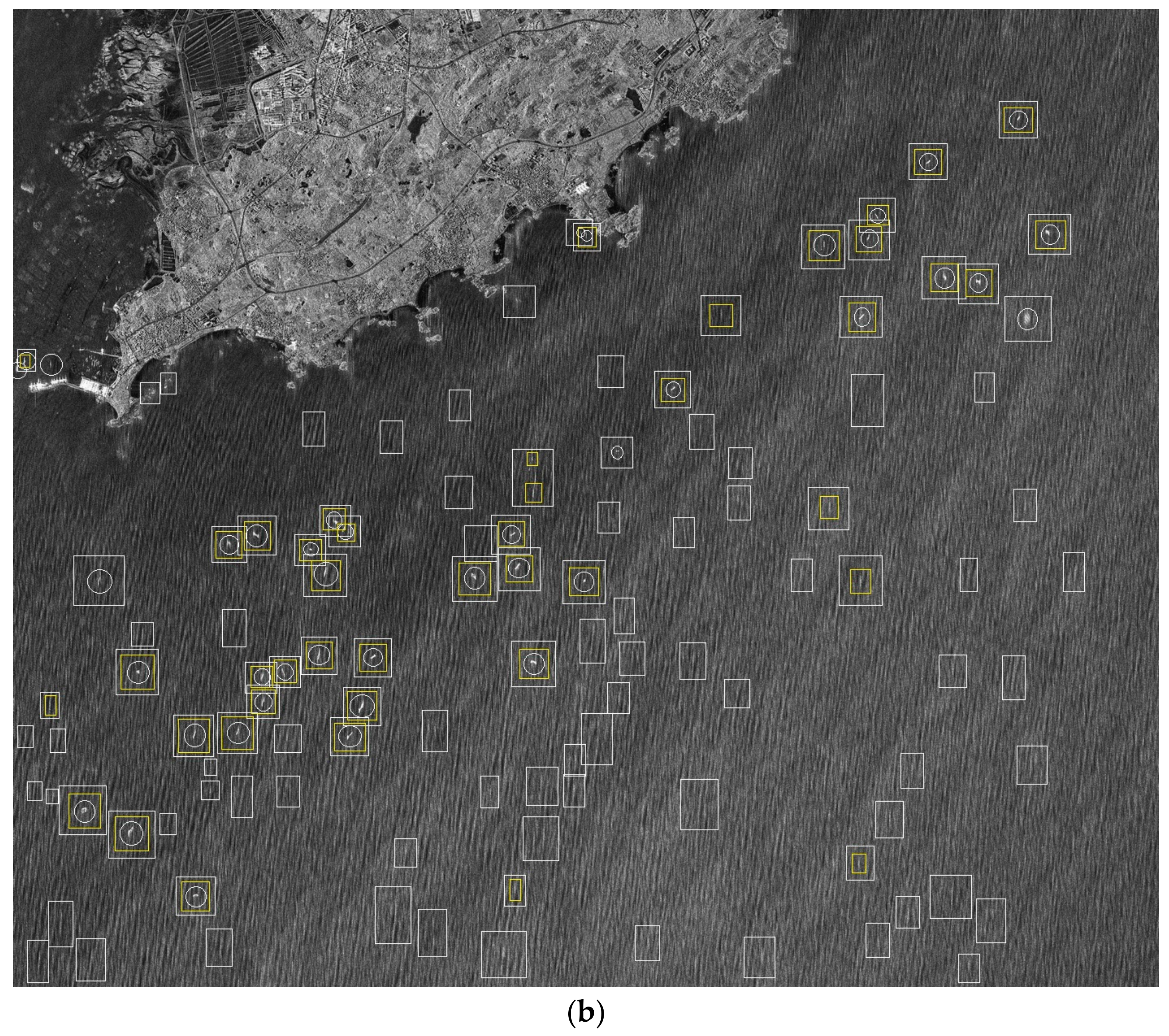
4.2. Experiment of Detection Method
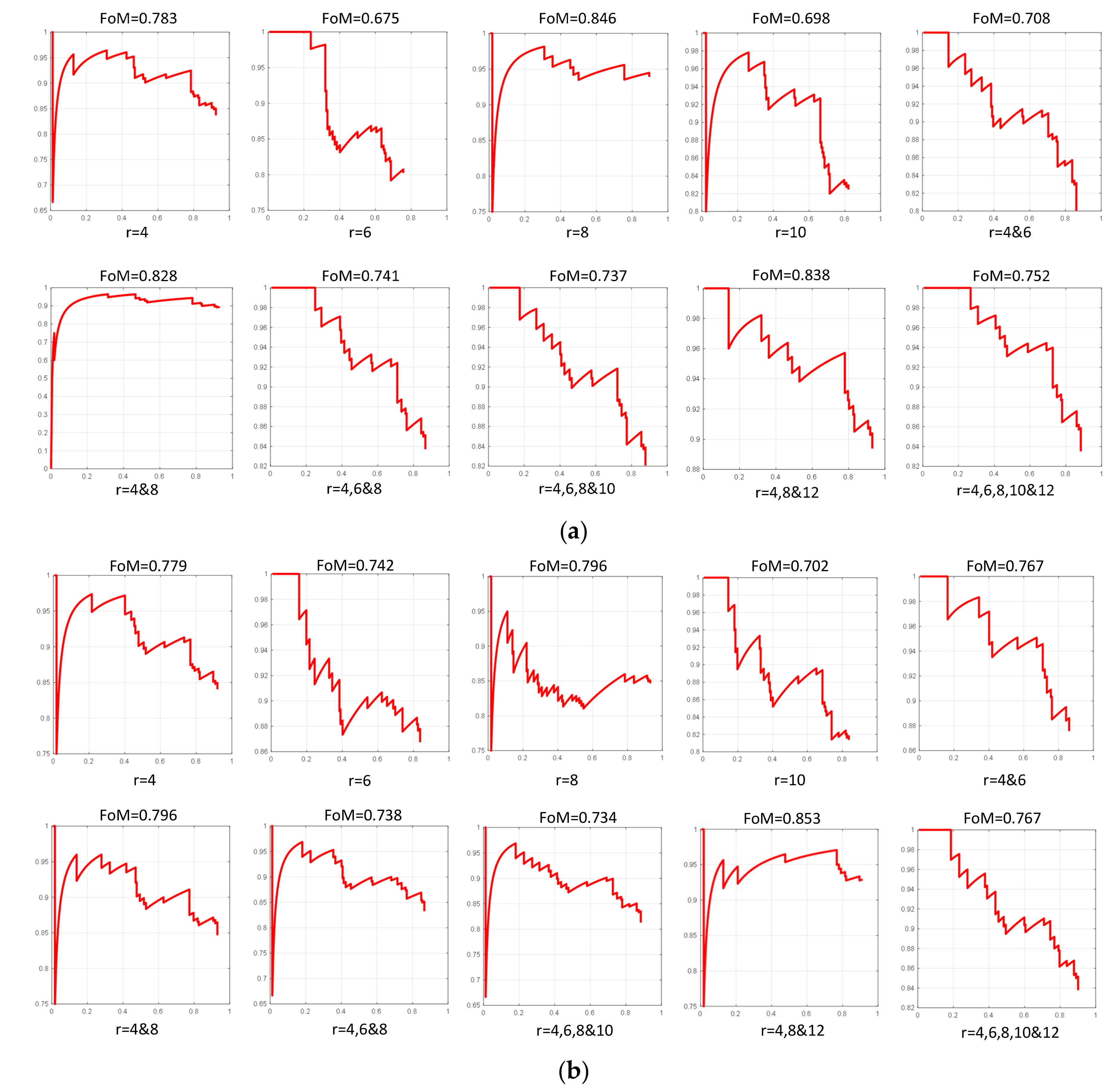
4.2.1. Key Parameters Analysis of Haar-Like Feature Extraction
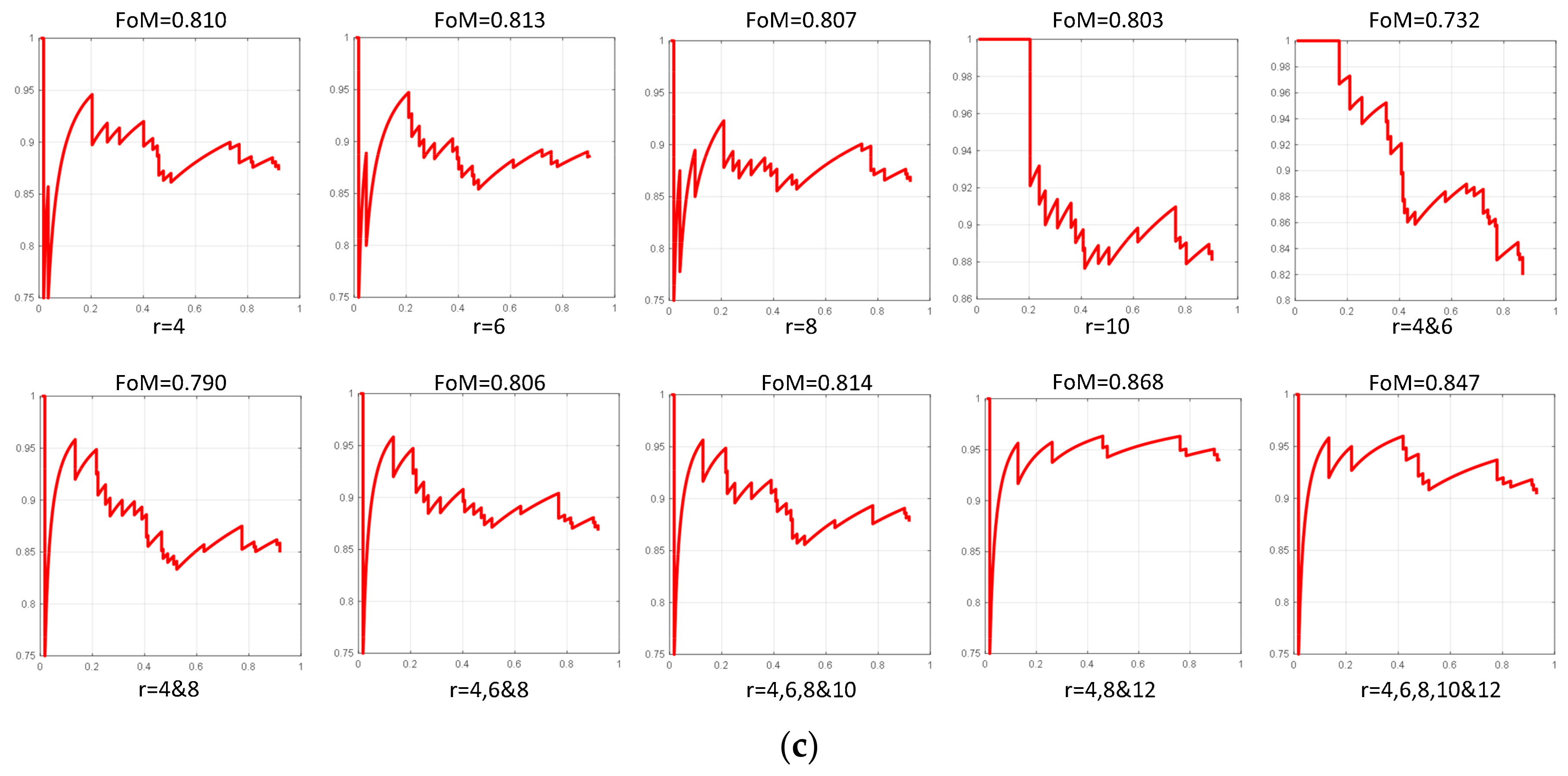
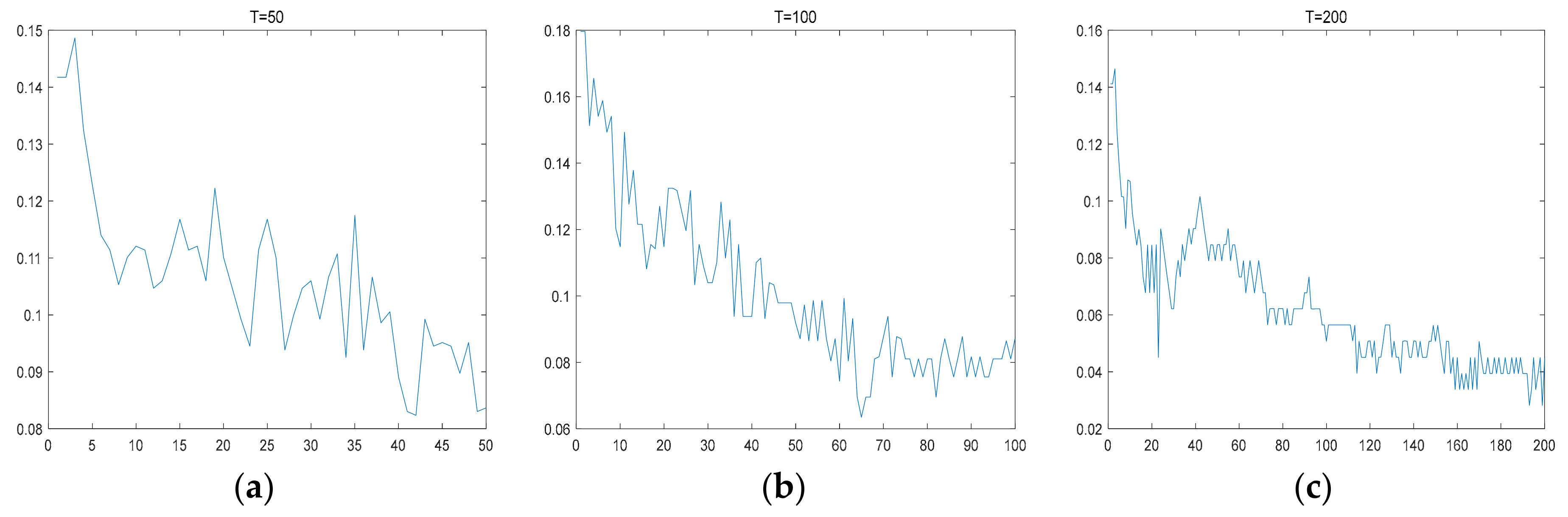
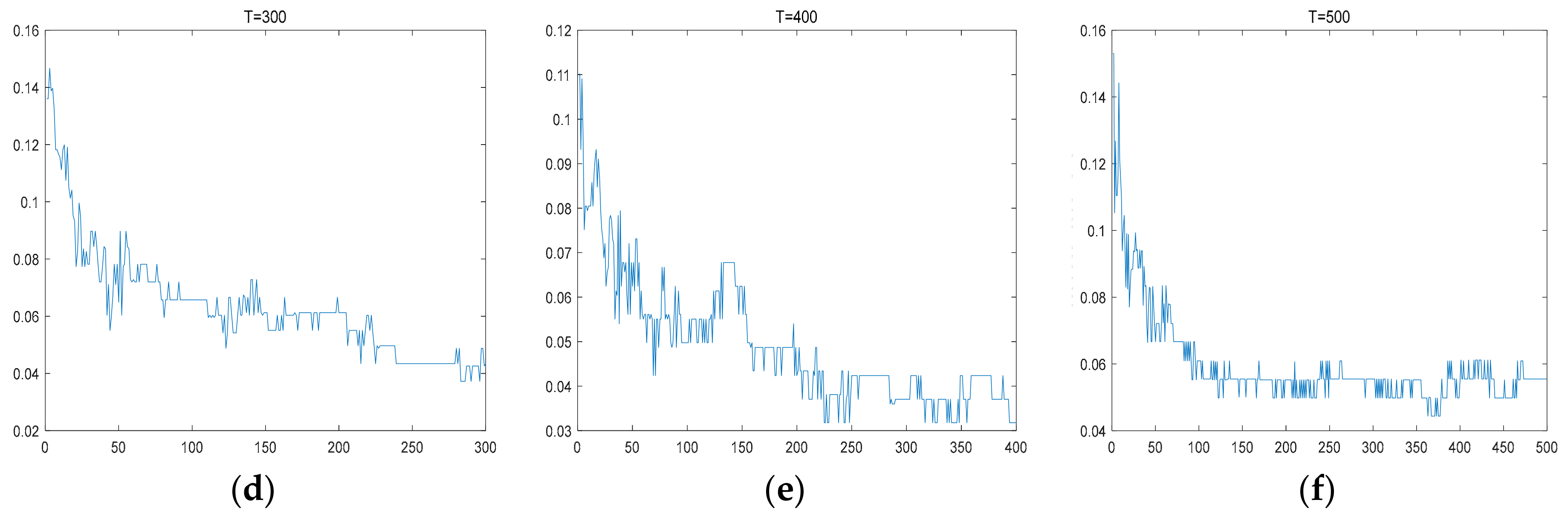
4.2.2. Key Parameters Analysis of Adaboost Classifier
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- El-Darymli, K.; Gill, E.W.; McGuire, P.; Power, D.; Moloney, C. Automatic target recognition in synthetic aperture radar imagery: A state-of-the-art review. IEEE Access 2016, 4, 6014–6058. [Google Scholar] [CrossRef]
- Liu, S.; Cao, Z.; Wu, H.; Pi, Y.; Yang, H. Target detection in complex scene of SAR image based on existence probability. EURASIP J. Adv. Signal Process. 2016, 1, 114. [Google Scholar] [CrossRef]
- Song, S.; Xu, B.; Li, Z.; Yang, J. Ship Detection in SAR Imagery via Variational Bayesian Inference. IEEE Geosci. Remote Sens. Lett. 2016, 13, 319–323. [Google Scholar] [CrossRef]
- Tao, D.; Doulgeris, A.P.; Brekke, C. A segmentation-based CFAR detection algorithm using truncated statistics. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2887–2898. [Google Scholar] [CrossRef]
- Yang, M.; Zhang, G. A novel ship detection method for SAR images based on nonlinear diffusion filtering and Gaussian curvature. Remote Sens. Lett. 2016, 7, 210–218. [Google Scholar] [CrossRef]
- Novak, L.M.; Owirka, G.J.; Netishen, C.M. Performance of a high-resolution polarimetric SAR automatic target recognition system. Linc. Lab. J. 1993, 6, 11–24. [Google Scholar]
- Goldstein, G.B. False-alarm regulation in log-normal and Weibull clutter. IEEE Trans. Aerosp. Electron. Syst. 1973, 1, 84–92. [Google Scholar] [CrossRef]
- Li, H.C.; Hong, W.; Wu, Y.R.; Fan, P.Z. On the empirical-statistical modeling of SAR images with generalized gamma distribution. IEEE J. Sel. Top. Sign. Proces. 2011, 5, 386–397. [Google Scholar]
- Di Bisceglie, M.; Galdi, C. CFAR detection of extended objects in high-resolution SAR images. IEEE Trans. Geosci. Remote Sens. 2005, 43, 833–843. [Google Scholar] [CrossRef]
- Kuttikkad, S.; Chellappa, R. Non-Gaussian CFAR techniques for target detection in high resolution SAR images. In Proceedings of the IEEE International Conference on Image Processing (ICIP 1994), Austin, TX, USA, 13–16 November 1994; pp. 910–914. [Google Scholar]
- Leng, X.; Ji, K.; Zhou, S.; Xing, X.; Zou, H. An adaptive ship detection scheme for spaceborne SAR imagery. Sensors 2016, 16, 1345. [Google Scholar] [CrossRef] [PubMed]
- Rey, M.T.; Drosopoulos, A.; Petrovic, D. A Search Procedure for Ships in RADARSAT Imagery; Report No. 1305; Defence Research Establishment Ottawa: Ottawa, ON, Canada, December 1996. [Google Scholar]
- Crisp, D.J. The State-of-the-Art in Ship Detection in Synthetic Aperture Radar Imagery; No. DSTO-RR-0272; Defence Science and Technology Organisation Salisbury (Australia) Info Sciences Lab: Salisbury, Australia, 2004. [Google Scholar]
- Qin, X.; Zhou, S.; Zou, H.; Gao, G. A CFAR detection algorithm for generalized gamma distributed background in high-resolution SAR images. IEEE Geosci. Remote Sens. Lett. 2013, 10, 806–810. [Google Scholar]
- Gao, G.; Ouyang, K.; Luo, Y.; Liang, S.; Zhou, S. Scheme of Parameter Estimation for Generalized Gamma Distribution and Its Application to Ship Detection in SAR Images. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1812–1832. [Google Scholar] [CrossRef]
- El-Darymli, K.; McGuire, P.; Power, D.; Moloney, C. Target detection in synthetic aperture radar imagery: A state-of-the-art survey. J. Appl. Remote Sens. 2013, 7, 071598. [Google Scholar] [CrossRef]
- Gao, G. A parzen-window-kernel-based CFAR algorithm for ship detection in SAR images. IEEE Geosci. Remote Sens. Lett. 2011, 8, 557–561. [Google Scholar] [CrossRef]
- Lang, H.; Zhang, J.; Wang, Y.; Zhang, X.; Meng, J. A synthetic aperture radar sea background distribution estimation by n-order Bézier curve and its application in ship detection. Acta Oceanol. Sin. 2016, 35, 117–125. [Google Scholar] [CrossRef]
- Tian, S.R.; Wang, C.; Zhang, H. An improved nonparametric CFAR method for ship detection in single polarization synthetic aperetuer radar imagery. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS 2016), Beijing, China, 10–15 July 2016; pp. 6637–6640. [Google Scholar]
- Wang, C.; Bi, F.; Zhang, W.; Chen, L. An Intensity-Space Domain CFAR Method for Ship Detection in HR SAR Images. IEEE Geosci. Remote Sens. Lett. 2017, 14, 529–533. [Google Scholar] [CrossRef]
- Dai, H.; Du, L.; Wang, Y.; Wang, Z. A modified CFAR algorithm based on object proposals for ship target detection in SAR images. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1925–1929. [Google Scholar] [CrossRef]
- Zhai, L.; Li, Y.; Su, Y. Inshore Ship Detection via Saliency and Context Information in High-Resolution SAR Images. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1870–1874. [Google Scholar] [CrossRef]
- Wang, S.; Wang, M.; Yang, S.; Jiao, L. New hierarchical saliency filtering for fast ship detection in high-resolution SAR images. IEEE Trans. Geosci. Remote Sens. 2017, 55, 351–362. [Google Scholar] [CrossRef]
- Wang, X.; Chen, C. Adaptive ship detection in SAR images using variance WIE-based method. Signal Image Video Process. 2016, 10, 1219–1224. [Google Scholar] [CrossRef]
- Wang, X.; Chen, C. Ship detection for complex background SAR images based on a multiscale variance weighted image entropy method. IEEE Geosci. Remote Sens. Lett. 2017, 14, 184–187. [Google Scholar] [CrossRef]
- Bentes, C.; Frost, A.; Velotto, D.; Tings, B. Ship-iceberg discrimination with convolutional neural networks in high resolution SAR images. In Proceedings of the 11th European Conference on Synthetic Aperture Radar (EUSAR 2016), Hamburg, Germany, 6–9 June 2016; pp. 1–4. [Google Scholar]
- Schwegmann, C.P.; Kleynhans, W.; Salmon, B.P.; Mdakane, L.W.; Meyer, R.G. Very deep learning for ship discrimination in synthetic aperture radar imagery. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS 2016), Beijing, China, 10–15 July 2016; pp. 104–107. [Google Scholar]
- Kang, M.; Leng, X.; Lin, Z.; Ji, K. A modified faster R-CNN based on CFAR algorithm for SAR ship detection. In Proceedings of the IEEE 2017 International Workshop on Remote Sensing with Intelligent Processing (RSIP 2017), Shanghai, China, 18–21 May 2017; pp. 1–4. [Google Scholar]
- Massonnet, D.; Souyris, J.C. Imaging with Synthetic Aperture Radar; CRC Press: Lausanne, Switzerland, 2008. [Google Scholar]
- Hao, S.; Liang, C.; Yin, Z.; Jian, Y.; Zhu, Y. A Novel Method of Speckle Reduction and Enhancement for SAR Image. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS 2017), Fort Worth, TX, USA, 23–28 July 2017. [Google Scholar]
- Viola, P.; Jones, M. Rapid object detection using a boosted cascade of simple features. In Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2001), Kauai, HI, USA, 8–14 December 2001; pp. 511–518. [Google Scholar]
- Kittler, J.; Illingworth, J. Minimum error thresholding. Pattern Recognit. 1986, 19, 41–47. [Google Scholar] [CrossRef]
- Lienhart, R.; Maydt, J. An extended set of haar-like features for rapid object detection. In Proceedings of the 2002 IEEE International Conference on Image Processing (ICIP 2002), Rochester, NY, USA, 22–25 September 2002; pp. 1–4. [Google Scholar]
- Beylkin, G. Discrete radon transform. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 162–172. [Google Scholar] [CrossRef]
- Zhang, Q.J. System design and key technologies of the GF-3 satellite. Acta Geod. Cartogr. Sin. 2017, 46, 269–277. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]
- Leng, X.; Ji, K.; Yang, K.; Zou, H. A bilateral CFAR algorithm for ship detection in SAR images. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1536–1540. [Google Scholar] [CrossRef]
- Wang, C.; Jiang, S.; Zhang, H.; Wu, F.; Zhang, B. Ship detection for high-resolution SAR images based on feature analysis. IEEE Geosci. Remote Sens. Lett. 2014, 11, 119–123. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Imaging Mode | Spatial Resolution (m) | Nominal Width (km) | Polarization Mode | ||
|---|---|---|---|---|---|
| Nominal | Azimuth | Range | |||
| Spotlight | 1 | 1.0–1.5 | 0.9–2.5 | 10 × 10 | optional single-pol |
| Ultra-fine stripmap | 3 | 3 | 2.5–5 | 30 | optional single-pol |
| Fine stripmap 1 | 5 | 5 | 4–6 | 50 | optional dual-pol |
| Imaging | Original | Filtered | ||||
|---|---|---|---|---|---|---|
| Mean | Var | ENL | Mean | Var | ENL | |
| Patch 1 | 0.153 | 0.074 | 4.228 | 0.155 | 0.012 | 163.375 |
| Patch 2 | 0.218 | 0.176 | 2.570 | 0.219 | 0.158 | 2.365 |
| Patch 3 | 0.645 | 0.280 | 5.302 | 0.584 | 0.182 | 10.271 |
| Patch 4 | 0.563 | 0.303 | 3.460 | 0.526 | 0.195 | 7.254 |
| No. | Patch 1 | Patch 2 | Correlation Coefficients | ||
|---|---|---|---|---|---|
| Edge | Line | Center | |||
| 1 |  |  | 0.9723 | 0.9554 | 0.9910 |
| 2 |  |  | 0.8326 | 0.7530 | 0.7694 |
| 3 |  |  | 0.4728 | 0.2898 | 0.9647 |
| 4 |  |  | 0.0446 | 0.0725 | 0.9158 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, H.; Zhang, Q.; Bian, M.; Wang, H.; Wang, Z.; Chen, L.; Yang, J. A Novel Ship Detection Method Based on Gradient and Integral Feature for Single-Polarization Synthetic Aperture Radar Imagery. Sensors 2018, 18, 563. https://doi.org/10.3390/s18020563
Shi H, Zhang Q, Bian M, Wang H, Wang Z, Chen L, Yang J. A Novel Ship Detection Method Based on Gradient and Integral Feature for Single-Polarization Synthetic Aperture Radar Imagery. Sensors. 2018; 18(2):563. https://doi.org/10.3390/s18020563
Chicago/Turabian StyleShi, Hao, Qingjun Zhang, Mingming Bian, Hangyu Wang, Zhiru Wang, Liang Chen, and Jian Yang. 2018. "A Novel Ship Detection Method Based on Gradient and Integral Feature for Single-Polarization Synthetic Aperture Radar Imagery" Sensors 18, no. 2: 563. https://doi.org/10.3390/s18020563