4.1. Field Experiments
To verify the detection performance of TrafficMS and the effectiveness of the proposed vehicle detection algorithms, the TrafficMS nodes were deployed in field traffic environments. These traffic scenarios include different traffic states of free-flow, synchronized flow, and jam flow conditions. The video cameras were used to record the actual traffic flow state, and the actual traffic volume data were obtained by manual statistics based on the video data that will be employed for comparison and analysis.
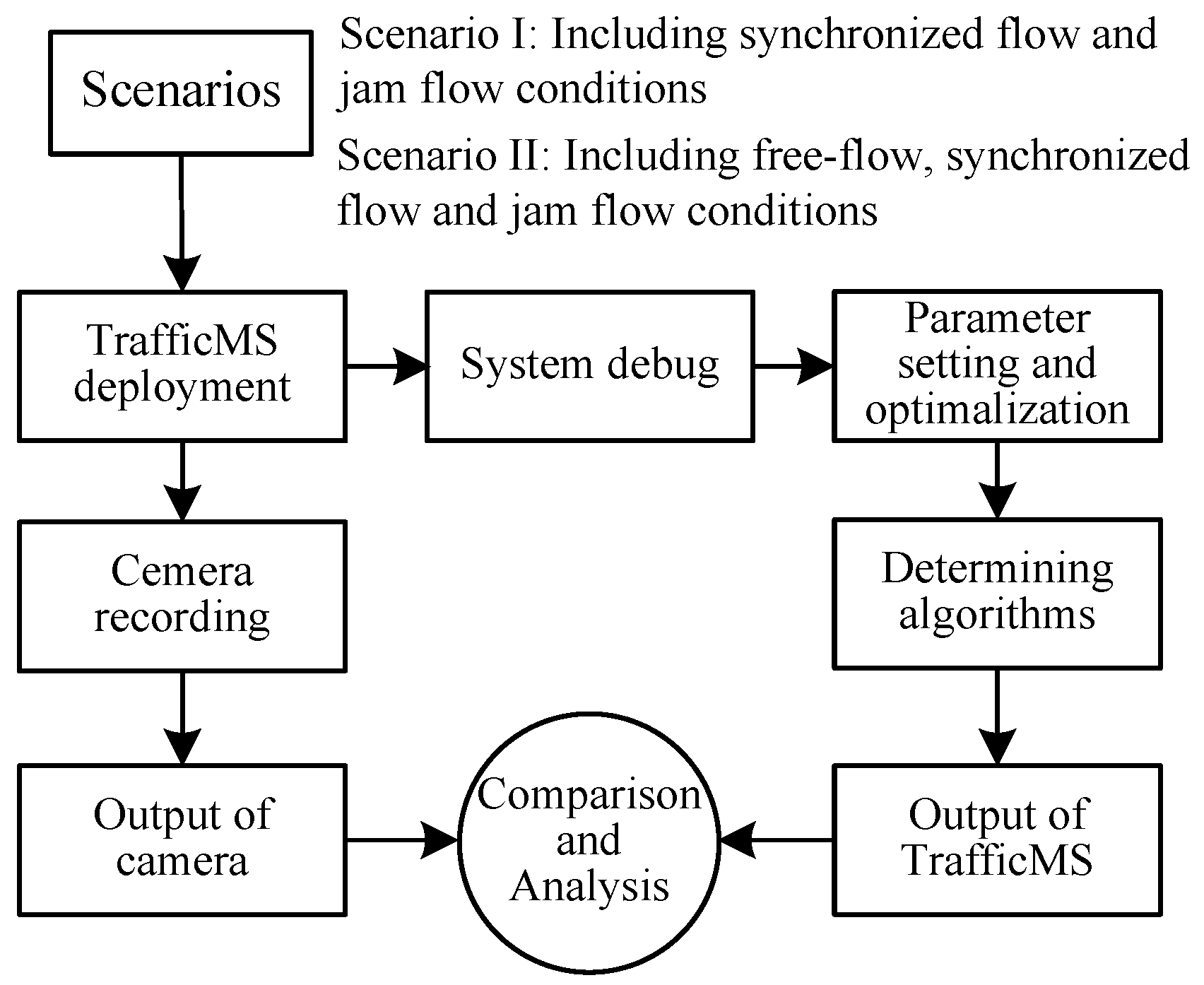
Figure 8 shows the experimental process, which verifies the performance of different algorithms for the three traffic flow states.
For parameter setting and optimization, there are two main strategies. Strategy 1 is an empirical approach. Engineers give an initial value for each parameter and compare the results from TrafficMS and camera for a period time. Then, the engineers decide if it is necessary to adjust the parameter values according to detection results. For several-time adjustments, the TrafficMS may have a satisfactory or suboptimal result. Since each location of TrafficMS has a special traffic environment, strategy 1 is easy to implement, but sounds to be troublesome. Strategy 2 is a dynamic optimization approach. Engineers set a reasonable range for each variable parameter (excluding some constant parameters, such as
yb,
fs, and so on). TrafficMS collects the field traffic flow data for a period. The TrafficMS adjusts each parameter within its given range and outputs the detection result for each alternative combination. The alternative with the highest detection accuracy is selected as the final parameter setting. This paper adopts strategy 2 to implement dynamic parameter optimization. The final parameter values of the DWVDA and the SA-DWVDA are shown in
Table 1.
(1) Scenario I: Including synchronized flow and jam flow conditions
In this scenario, TrafficMS was deployed in the center of a lane that belongs to a sub-arterial road in Beijing. TrafficMS can detect the real-time traffic state of this lane. This road is a two-lane road, which has no disturbances, such as lane changing among the vehicles on the road. The average speed of the vehicles on this road is a medium speed. The approximate distance between TrafficMS and the pedestrian signal is 30 m. When the signal is green, the synchronized flow will be the dominating mode; when the signal is red, the vehicles will queue and the dominating mode of traffic flow will transfer to jam flow. Several datasets with different time periods were obtained; both the DWVDA and the SA-DWVDA were tested based on these datasets.
Table 2 shows the results of experiment scenario I for traffic vehicle counting. In
Table 2, each dataset was named according to the starting time to be recorded, whose format is year-month-day-hour-minute.
As shown in
Table 2, the performance of both the DWVDA and the SA-DWVDA is acceptable for vehicle counting in scenario I and the mean absolute percent error (MAPE) of their accuracies exceeds 99%. In the red signal interval, especially during the evening peak hour (such as the date set 200907291708), the mode of traffic flow will convert to the jam flow mode and the car-following distance between a front vehicle and a rear vehicle is very small (approximately 2 m). To reduce the disturbance of the “tailgating effect” between front and rear vehicles in jam flow conditions, the SA-DWVDA yields a better performance. For other conditions, the DWVDA and the SA-DWVDA can achieve satisfactory results. Although these datasets contain different climate and temperature conditions (summer and winter), different time periods (nonpeak hours and peak hours), different traffic signal conditions (smooth traffic during green signal intervals and queuing traffic during red signal intervals), the results are not significantly different under these conditions, which indicates that the algorithms of the DWVDA and the SA-DWVDA are robust.
In order to analyze the detailed counting-errors for individual vehicle, three possible errors are proposed and analyzed, which are “tailgating effect error” (TE), “big vehicle effect error” (BE), and “lane-changing error” (LE). In the algorithms of the DWVDA and the SA-DWVDA, the TE will reduce the counting number for detecting two or more adjacent vehicles as one vehicle; the BE will increase the counting number for detecting one large vehicle (such as bus, truck) as two or more vehicles; and the LE will lead to the manual statistical error using camera data which may increase or decrease the counting number for different visual angle of videos and different personal criterions.
Table 3 shows the detailed counting-errors for individual vehicles of scenario I. For the road has no lane-changing disturbances, the value of the LE for each dataset is always 0. For scenario I, the performances of the DWVDA and the SA-DWVDA are similar, but the SA-DWVDA has a little advantage in dealing with the TE and the BE.
(2) Scenario II: Including free-flow, synchronized flow, and jam flow conditions
This scenario is located at a signalized intersection of an arterial in Xi’an, China. TrafficMS was deployed in the center of an outer straight lane near the signalized intersection. The traffic flow in the lane will be influenced by the traffic signal, which will cause a long vehicle queue. The vehicles in the traffic flow will exhibit car-following behaviors and stop-and-go movements due to the influence of heavy traffic. The algorithms of the DWVDA and the SA-DWVDA were tested based on the continuous vehicle waveform data that are derived from TrafficMS between 3 a.m. on 24 November 2012 and 3 a.m. on 25 November 2012.
Figure 9 shows the traffic state within this 24-h period. Prior to dawn, the traffic volume was small and the free-flow mode was the dominating mode. Early in the morning as the traffic volume increased, the synchronized flow mode became the dominating mode. However, during the morning or evening peak hours, the traffic volume was high and the traffic congestion increased. Then, the phenomena of stop-and-go movements frequently occurred and the jam flow mode was the main mode.
Table 4 shows the results of experiment scenario II. Similar to scenario I, each dataset in
Table 4 is named by the recording time from TrafficMS, which is year-month-day-hour-minute. Each dataset included an hour of continuous traffic flow data. The real hourly traffic volume on the lane located by TrafficMS was obtained by manual statistics based on continuous video data (the video data from 18:00 to 19:00 and 02:00 to 03:00 was incomplete; thus, the corresponding datasets were missing).
As shown in
Table 4, the MAPE of the DWVDA for vehicle counting in a continuous 24-h period is 7.07%. By adopting the second adaptive mechanism, the SA-DWVDA reduces the MAPE to 2.54%; for any hour period, the accuracy of vehicle counting exceeds 90%. Generally, in free-flow conditions (such as datasets 201211240300, 201211240400, and 201211250100), the DWVDA and the SA-DWVDA have high accuracy, which is approximately 97%. However, in synchronized flow conditions (such as datasets 201211242100 and 201211242200), the accuracies of the DWVDA and the SA-DWVDA decrease; however, the results of the SA-DWVDA will improve. For jam flow, the traffic volume of a single lane with traffic signal control was more than 600, thus, the traffic flow speed was low and the car-following distance between front vehicles and rear vehicles was small. These phenomena triggered the “tailgating effect” (
Figure 6) in the vehicle waveform data derived from the TrafficMS. In this case, the DWVDA could not eliminate the “tailgating effect” and the accuracy of the DWVDA decreased. The APEs of the DWVDA increased from 15% to 20% (refer to datasets 201211241300 and 201211241400). However, the SA-DWVDA was capable of solving this type of problem and reduce the counting errors. As shown in
Table 4, in jam flow conditions, the hourly APEs of the SA-DWVDA were approximately 2%, which satisfied the vehicle counting demands for congested traffic. The experiment results indicate that the proposed vehicle counting methods compensate for the shortage of invasive sensors for vehicle counting.
Similarly,
Table 5 shows the detailed counting-errors for individual vehicles of scenario II. As shown in
Table 5, Scenario II has two lanes for each traffic direction. In addition, there are some lane-changing behaviors, especially during peak-hour periods. Except for LE, the TE and the BE are two main factors influencing algorithm performance. Compared with the DWVDA, the SA-DWVDA can reduce both the TEs and the BEs, especially in jam flow conditions and some synchronized flow conditions (from 201211240700 to 201211242000).
4.2. Analysis and Discussion
Based on the DWVDA that was proposed in [
12], the SA-DWVDA proposed in this paper has achieved the continuous vehicle counting problem in jam flow conditions. Regarding the results of scenarios I and II, the detection results of scenario I are always better than the detection results of scenario II. One reason may be the time issue. If the time periods (predominantly 5–10 min) for the datasets in scenario I are shorter than the time periods for the datasets in scenario II, then the real traffic volumes in each dataset by the manual statistics will be more accurate. For an hourly period of each dataset, the statistic errors of real traffic volumes will be large. Another reason may be the traffic environment. A single lane in each direction is available in scenario I and the disturbance of lane changing will be weaker than scenario II. In scenario II, some vehicles change lanes near TrafficMS, which enlarges the errors in the vehicle waveform data and video data. In scenario II, the errors under synchronized flow conditions for some hours will be larger than the errors in jam flow conditions. The reasons may be related to the lane changing issue. The video demonstrates that the condition of lane changing is ideal in jam flow conditions and few behaviors of lane changing are observed. However, in synchronized flow conditions, the distance between a front vehicle and a rear vehicle will be large, which will increase the probability of lane changing and cause a large detection error.
In terms of algorithmic complexity, because the SA-DWVDA requires evaluation, the update criteria of the second adaptive traffic environment are dynamically evaluated, which may increase the complexity of the algorithm and the calculation of TrafficMS. For powering by dry batteries, to extend the lifetime of TrafficMS, an alternative scheme is to adopt a dual-algorithm in TrafficMS. In non-jam flow conditions, the DWVDA will be employed. In jam flow conditions, the SA-DWVDA will be activated. In engineering, a simple strategy is the use of the SA-DWVDA from 07:00 to 19:00 and the use of the DWVDA in other periods.
Traffic vehicle counting is the basis of traffic information acquisition. Jam flow conditions are key and difficult points for traffic vehicle counting. To achieve accurate vehicle counting in jam flow conditions, a key step is to achieve entire space-time and networked traffic information acquisition. The accurate detection of time and state information when vehicles pass TrafficMS, facilitates the acquisition of other information (such as sectional traffic volumes, hourly traffic volumes, individual vehicle speed, headway, time or space occupancy) in many practical applications of ITS. The outputs of the DWVDA and the SA-DWVDA that are proposed in this paper not only show the traffic volume of any period but also provide the approaching time and departing time when a vehicle passes the TrafficMS, which facilitates the implementation of multi-parameter sensing of traffic flow.
Figure 10 shows some vehicle waveforms for dataset 201211240800 and the outputs of the SA-DWVDA from 8:00 to 8:05 (a continuous traffic flow with eight vehicles). In
Figure 10, a diamond represents the approaching time when a vehicle passes TrafficMS and a square represents the departing time. From left to the right, the time interval of two adjacent diamonds is the headway between two vehicles. Similarly, the time interval between two adjacent squares is the tail time of the vehicles; the time interval between an adjacent diamond and square is the gap time between the vehicles; and the time interval between an adjacent square and diamond is the passing time between two vehicles.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}