
An MEF-Based Localization Algorithm against Outliers in Wireless Sensor Networks


Abstract
:1. Introduction
2. Related Works
3. Preliminaries
4. Outlier Detection Method
4.1. Calculation of the Entropy Uncertainty
4.2. Foundation of the Trust Evaluation Model
5. MEF-Based Location Estimation Method
5.1. Formulation of the Localization Problem
- (1)
- Given , if there is a vector-valued function with components , where , then the lp-norm of is.Hence, . Consequently,That is .
- (2)
- With the properties of lp-norm, for , is a monotonically decreasing function in terms of , hence
5.2. MEF-Based Localization Process
6. Performance Evaluation
6.1. Impact of the Number of Distance Outliers
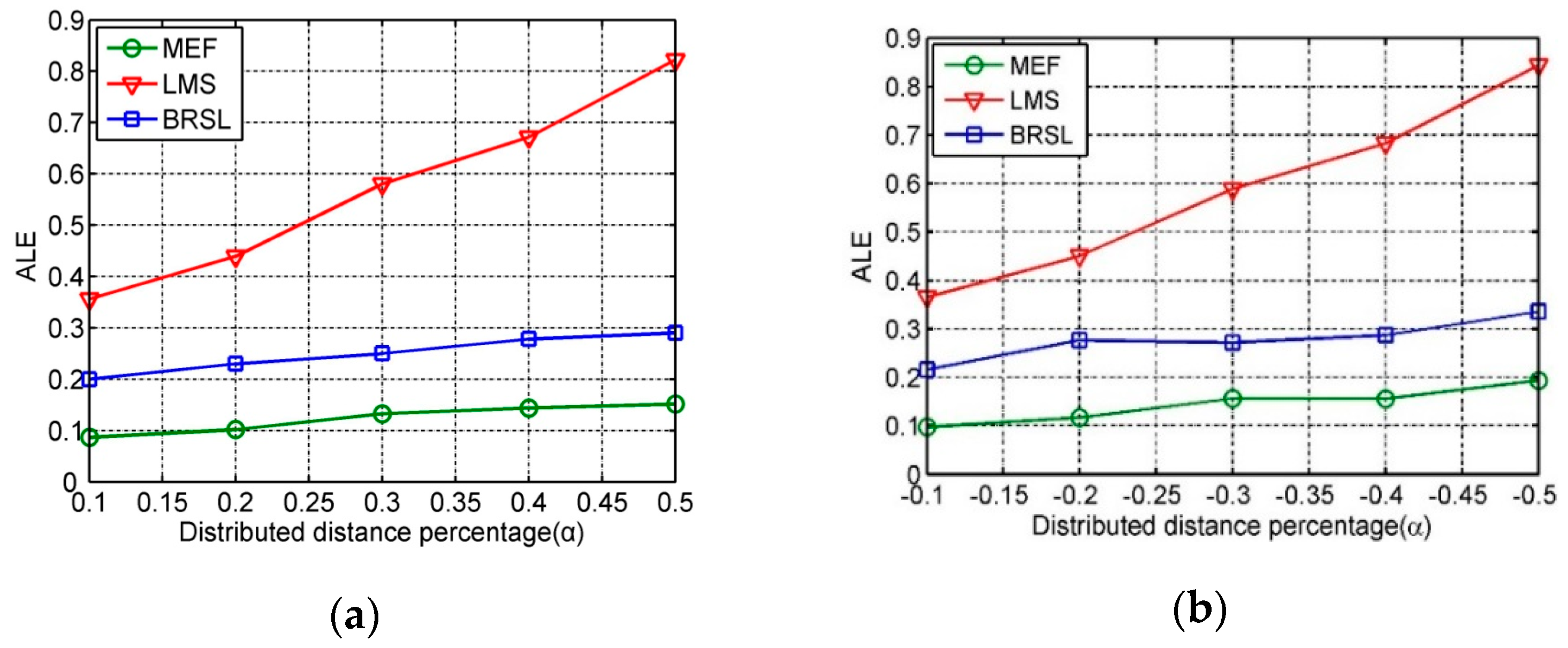
6.2. Impact of Disturbed Distance Percentage
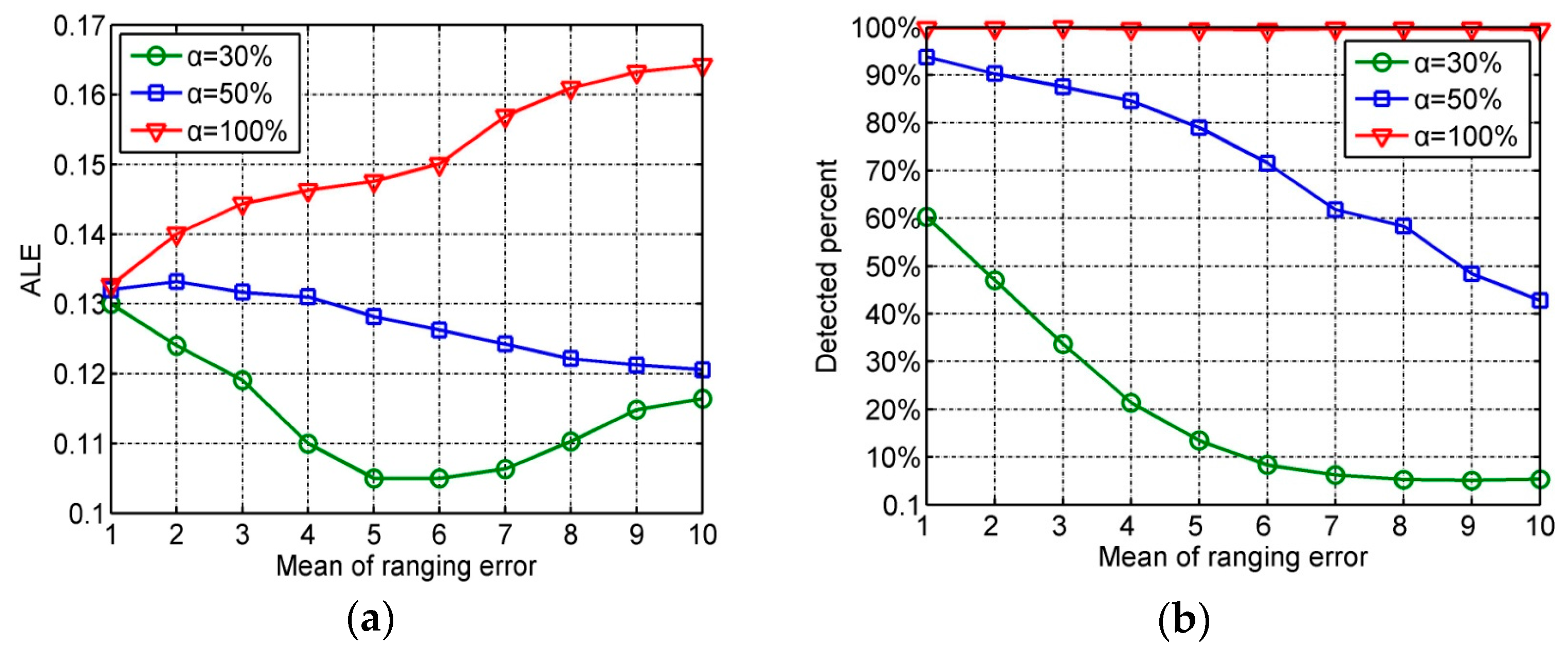
6.3. Impact of the Mean of Ranging Error
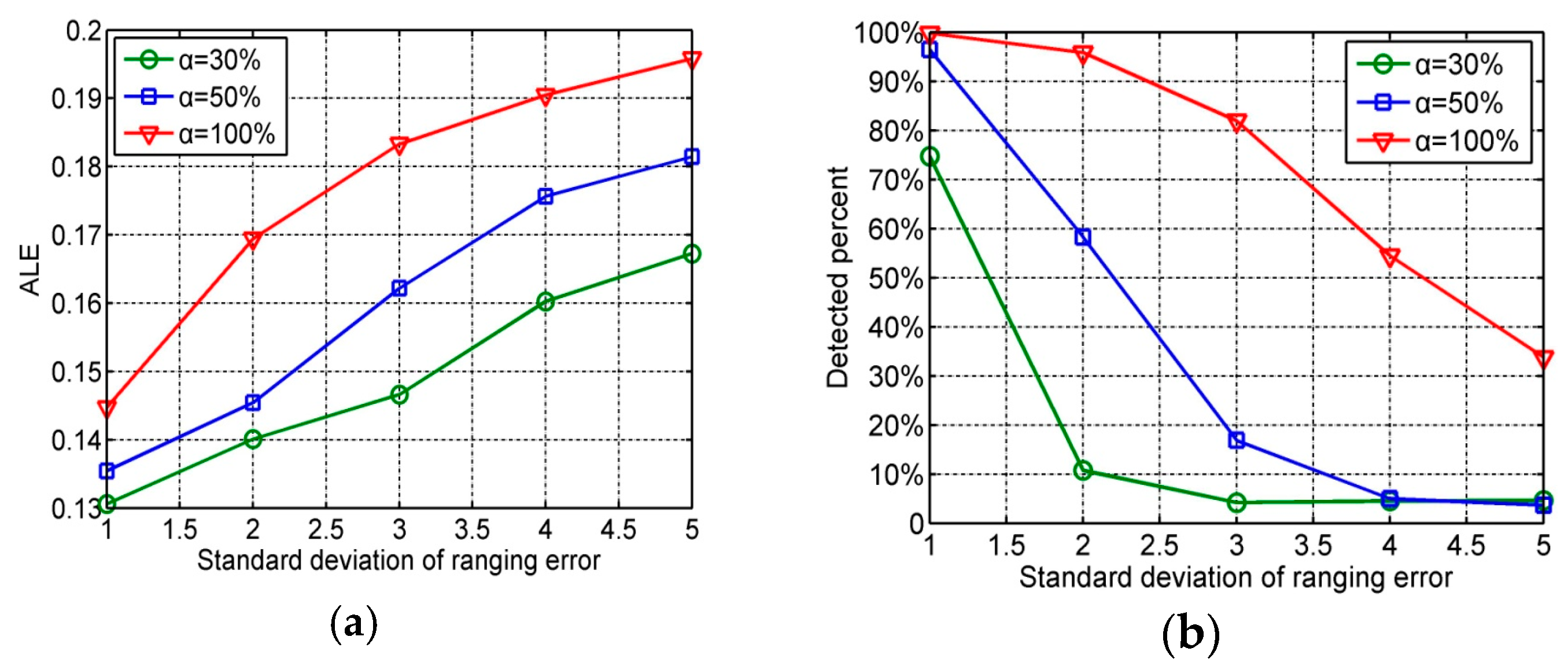
6.4. Impact of the Standard Deviationof Ranging Error
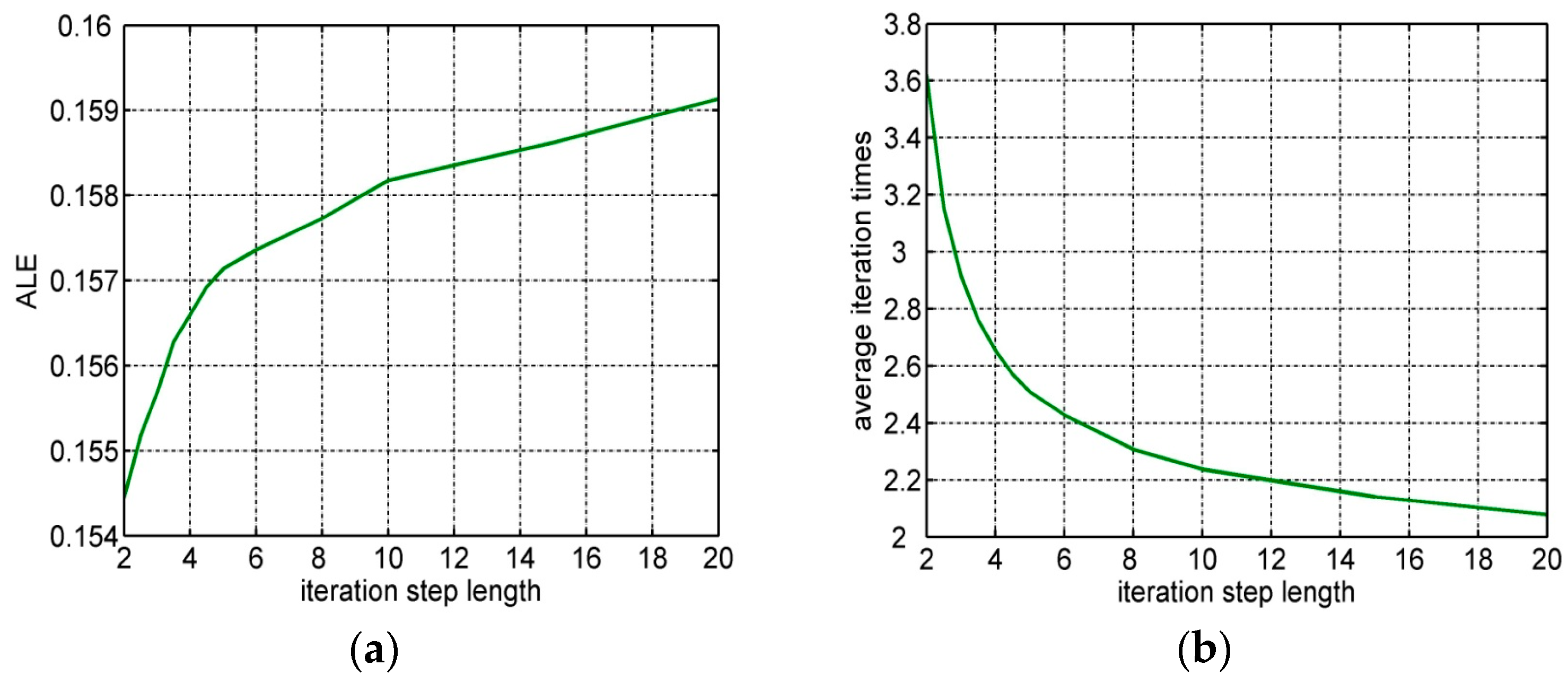
6.5. Impact of the Iteration Step Length
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Tomic, S.; Beko, M.; Dinis, R. Distributed RSS-based localization in wireless sensor networks based on Second-order cone programming. Sensors 2014, 14, 18410–18432. [Google Scholar] [CrossRef] [PubMed]
- Yin, J.H.; Wan, Q.; Yang, S.W.; Ho, K.C. A sample and accurate TDOA-AOA localization method using two stations. IEEE Signal Process. Lett. 2016, 23, 144–148. [Google Scholar] [CrossRef]
- Gui, L.Q.; Val, T.; Wei, C.; Dalce, R. Improvement of range-free localization technology by a novel DV-hop protocol in wireless sensor networks. Ad Hoc Netw. 2015, 24, 55–73. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.G.; Liu, X.; Wang, J.X.; Cao, J.N.; Min, G.Y. Accurate range-free localization for anisotropic wireless sensor networks. ACM Trans. Sens. Netw. 2015, 11, 1–28. [Google Scholar] [CrossRef] [Green Version]
- Han, G.J.; Xu, H.H.; Doung, T.Q.; Jiang, J.F.; Hara, T. Localization algorithms of wireless sensor networks: A survey. Telecommun. Syst. 2013, 52, 2419–2436. [Google Scholar] [CrossRef]
- Shahid, N.; Naqvi, I.H.; Qaisar, S.B. Characteristics and classification of outlier detection techniques for wireless sensor networks in harsh environments: A survey. Art. Intell. Rev. 2015, 43, 193–228. [Google Scholar] [CrossRef]
- Zhong, S.; Jadliwala, M.; Upadhyaya, S.; Qiao, C. Towards a theory of robust localization against malicious beacon nodes. In Proceedings of the 27th Conference on Computer Communications, Phoenix, AZ, USA, 13–18 April 2008; pp. 2065–2073.
- Garg, R.; Varna, A.L.; Wu, M. An efficient gradient descent approach to secure localization in resource constrained wireless sensor networks. IEEE Trans. Inf. Forensic Secur. 2012, 7, 717–730. [Google Scholar] [CrossRef]
- Yu, N.; Zhang, L.R.; Ren, Y.J. A novel D-S based secure localization algorithm for wireless sensor networks. Secur. Commun. Netw. 2014, 7, 1945–1954. [Google Scholar] [CrossRef]
- Xiao, Q.J.; Bu, K.; Wang, Z.J.; Xiao, B. Robust localization against outliers in wireless sensor networks. ACM Trans. Sens. Netw. 2013, 9, 1–26. [Google Scholar] [CrossRef]
- So, H.C.; Chan, Y.T.; Chan, F.K.W. Closed-form formulae for time-difference-of-arrival estimation. IEEE Trans. Signal Process. 2008, 56, 2614–2620. [Google Scholar] [CrossRef]
- Li, B.; Cui, W.; Wang, B. A robust wireless sensor network localization algorithm in mixed LOS/NLOS scenario. Sensors 2015, 15, 23536–23553. [Google Scholar] [CrossRef] [PubMed]
- Boukerche, A.; Oliveira, A.B.F.; Nakamura, E.F.; Loureiroet, A.A.F. Secure localization algorithms for wireless sensor networks. IEEE Commun. Mag. 2008, 46, 96–101. [Google Scholar] [CrossRef]
- Liu, D.G.; Ning, P.; Liu, A.; Wang, C.; Du, W.L. Attack-resistant location estimation in wireless sensor networks. ACM Trans. Inf. Syst. Secur. 2008, 11, 1–22. [Google Scholar] [CrossRef]
- Picard, J.S.; Weiss, A.J. Bounds on the number of identifiable outliers in source localization by linear programming. IEEE Trans. Signal Process. 2010, 58, 2884–2895. [Google Scholar] [CrossRef]
- Yang, Z. Beyond triangle inequality: Sifting noisy and outlier distance measurements for localization. ACM Trans. Sens. Netw. 2013, 9, 1–26. [Google Scholar] [CrossRef]
- Yang, Z.; Jian, L.R.; Wu, C.S.; Liu, Y.H. Detecting outlier measurements based on graph rigidity for wireless sensor network localization. IEEE Trans. Veh. Technol. 2013, 62, 374–383. [Google Scholar] [CrossRef]
- Du, W.L.; Fang, L.; Peng, N. LAD: Localization anomaly detection for wireless sensor networks. J. Parallel Distrib. Comput. 2006, 66, 874–886. [Google Scholar] [CrossRef]
- Sarigiannidis, P.; Karapistoli, E.; Economides, A.A. Detecting Sybil attacks in wireless sensor networks using UWB ranging-based information. Expert Syst. Appl. 2015, 42, 7560–7572. [Google Scholar] [CrossRef]
- Zhu, W.T.; Xiang, Y.; Zhou, J.Y.; Deng, R.H.; Bao, F. Secure localization with attack detection in wireless sensor networks. Int. J. Inf. Secur. 2011, 10, 155–171. [Google Scholar] [CrossRef]
- Wen, L.F.; Cui, L.G.; Chai, S.C.; Zhang, B.H. Neighbor constraint assisted distributed localization for wireless sensor networks. Math. Problem Eng. 2014, 2014. [Google Scholar] [CrossRef]
- Li, Z.; Trappe, W.; Zhang, Y.Y.; Nath, B. Robust statistical methods for securing wireless localization in sensor networks. In Proceedings of the 4th International Symposium on Information Processing in Sensor Networks, Los Angeles, CA, USA, 24 April 2005; pp. 91–98.
- Jin, R.C.; Che, Z.P.; Xu, H.; Wang, Z.; Wang, L.D. An RSSI-based localization algorithm for outliers suppression in wireless sensor networks. Wirel. Netw. 2015, 21, 2561–2569. [Google Scholar] [CrossRef]
- Yu, N.; Zhang, L.R.; Ren, Y.J. BRS-based robust secure localization algorithm for wireless sensor networks. Int. J. Distrib. Sens. Netw. 2013, 2013. [Google Scholar] [CrossRef]
- Edwards, S. Elements of Information Theory, 2nd ed.; Wiley-Interscience: New York, NY, USA, 2008; pp. 400–401. [Google Scholar]
- Jaynes, E.T. Information theory and statistical mechanics. Phys. Rev. 1957, 106, 620–630. [Google Scholar] [CrossRef]
- Li, X.S.; Fang, S.C. On the entropic regularization method for solving min-max problems with applications. Math. Methods Op. Res. 1997, 46, 119–130. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1: set maximum entropy factor , multiple (iteration step length) l = 3, threshold ε = 1e-6 |
| 2: calculate the lower limit of the unknown node’s coordinate |
| 3: calculate the upper limit of the unknown node’s coordinate |
| 4: calculate the initial coordinate of unknown node |
| 5: while 1 |
| 6: minimize and get the next iterative coordinate |
| 7: //determine whether is the optimal solution |
| 8: if |
| 9: get the optimal estimated coordinate |
| 10: break |
| 11: end if |
| 12: change the iterative number: |
| 13: change the maximum entropy factor: |
| 14: end while |
| Parameters | Values |
|---|---|
| Network size | 150 m × 150 m |
| Number of sensor nodes | 150 |
| Percent of anchor nodes | 30% |
| Communication radius (R) | 30 m |
| Hop count | 2 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Wan, J.; Wang, M.; Zhang, Q. An MEF-Based Localization Algorithm against Outliers in Wireless Sensor Networks. Sensors 2016, 16, 1041. https://doi.org/10.3390/s16071041
Wang D, Wan J, Wang M, Zhang Q. An MEF-Based Localization Algorithm against Outliers in Wireless Sensor Networks. Sensors. 2016; 16(7):1041. https://doi.org/10.3390/s16071041
Chicago/Turabian StyleWang, Dandan, Jiangwen Wan, Meimei Wang, and Qiang Zhang. 2016. "An MEF-Based Localization Algorithm against Outliers in Wireless Sensor Networks" Sensors 16, no. 7: 1041. https://doi.org/10.3390/s16071041