
Content-Based Multi-Channel Network Coding Algorithm in the Millimeter-Wave Sensor Network

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- We design a fusion-driven model based on the D-S evidence theory to classify the sensor nodes according to the content of their data. By using this model, the sensor nodes with related data are classified for further processing to obtain more accurate data results and remove the redundant data during the data collection.
- We propose the CMNC algorithm, which combines the use of data fusion and network coding for multi-channel data transmission in the millimeter-wave sensor network. The obtained content relevance of the sensory data is adopted for channel assignment to fully utilize the functions of data fusion and network coding.
- We perform extensive simulations to evaluate the proposed CMNC algorithm by comparing to other algorithms under several performance criteria. Simulation results demonstrate that the CMNC algorithm achieves high performance for data transmission in the millimeter-wave sensor network.
2. Related Work
3. System Model and Problem Statement
3.1. System Model
3.2. Problem Statement
4. The Fusion-Driven Model Based on D-S Evidence Theory
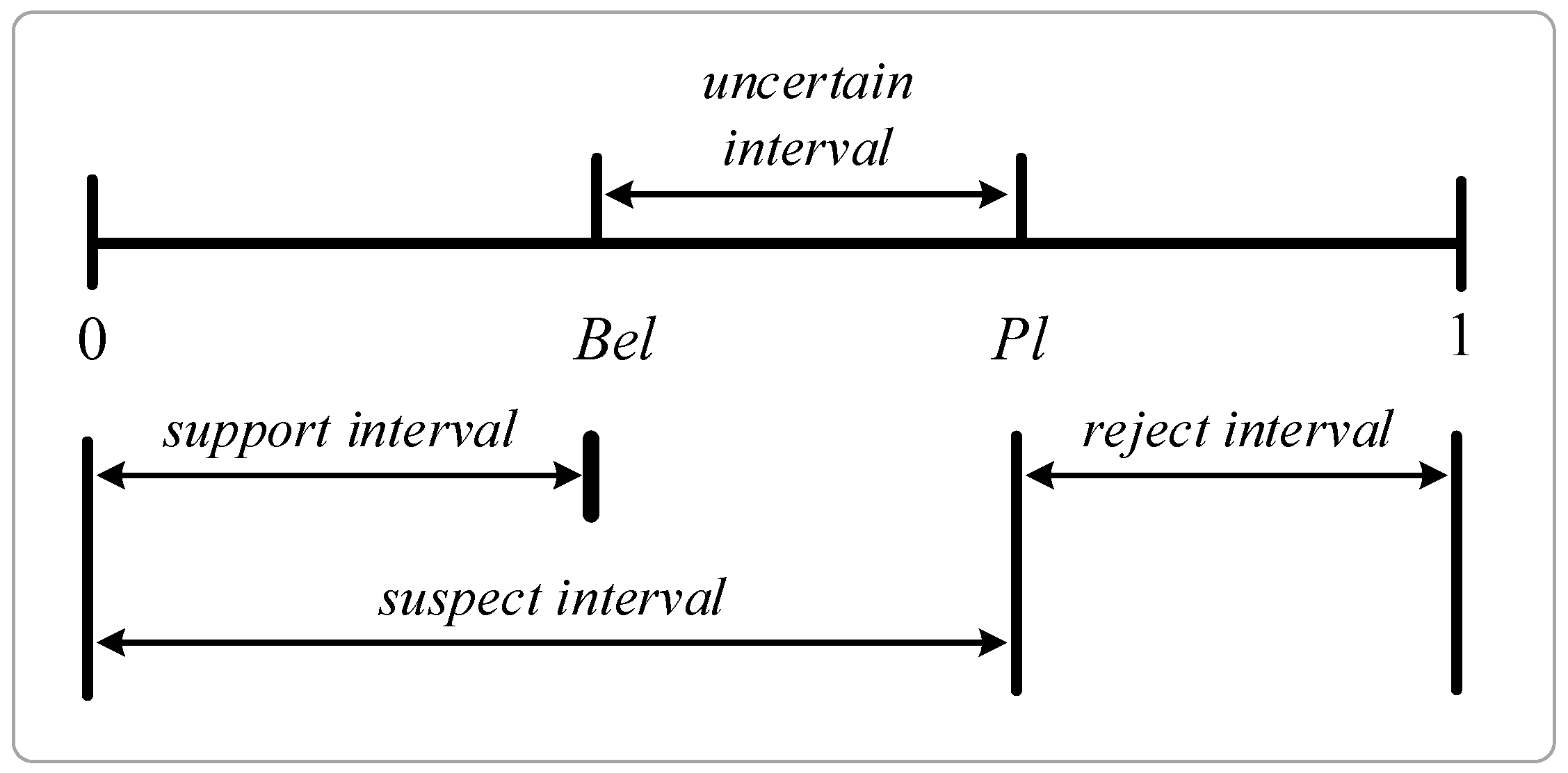
4.1. Basic Mathematical Terminology of D-S Evidence Theory
4.2. Sensor Node Classification Based on D-S Evidence Theory
5. Content-Based Multi-Channel Network Coding Algorithm
5.1. Assumptions
- Each sensor node has a unique identification, which represents the logical address of the sensor node in the millimeter-wave sensor network, and it can be replaced by the MAC address.
- The millimeter-wave sensor network is fully connected, which means a sensor node can find a route to any other sensor node. There is no obstacle that the data transmitted in the network face. Each sensor node can be a sender and can receive data from all other sensor nodes when they use the same channel.
- Each sensor node has a label L to represent its class, and the change of the class depends on the data content. A sensor node only belongs to one class within a certain period.
- The millimeter-wave sensor network is a homogeneous network, such that the sensor node’s computing capacity, power consumption, communication cost, coding cost, transmission distance and propagation loss are all the same.
- Each sensor node has the ability to access multiple channels. However, the sensor node has one antenna, which means it can take up only one transmission channel in the corresponding time.
- The time that the sensor node occupies a channel is arranged according to the total length of the transmission data. However, in a unit of time, each sensor node can only send or receive a packet. The data that are not transmitted within the prescribed period need to wait until the next time.
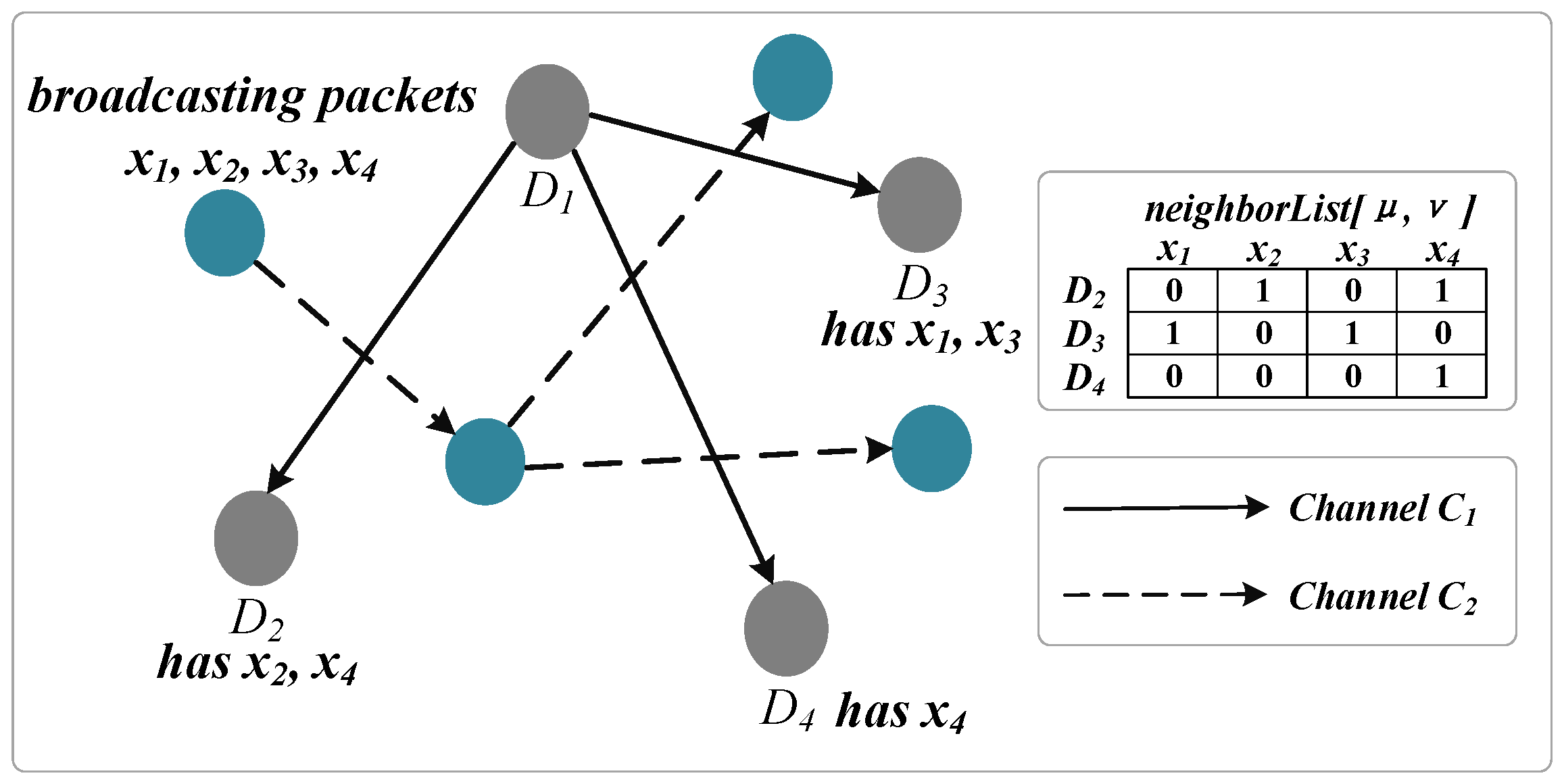
- The sender knows the route in which the data were transmitted to the receiver, including through how many relays and which relay sensor node executes coding or forwarding of the data. A sensor node has a neighbor list to record the data packets obtained by their neighbor sensor nodes. A sensor node receives a packet that corresponds to the position value of one, otherwise it corresponds to zero.
- All sensor nodes in the network have the ability to process the data from senders or relays, which implies that each sensor node can encode or decode the data according to the transmission requirement.
5.2. Channel Assignment for the Sensor Nodes
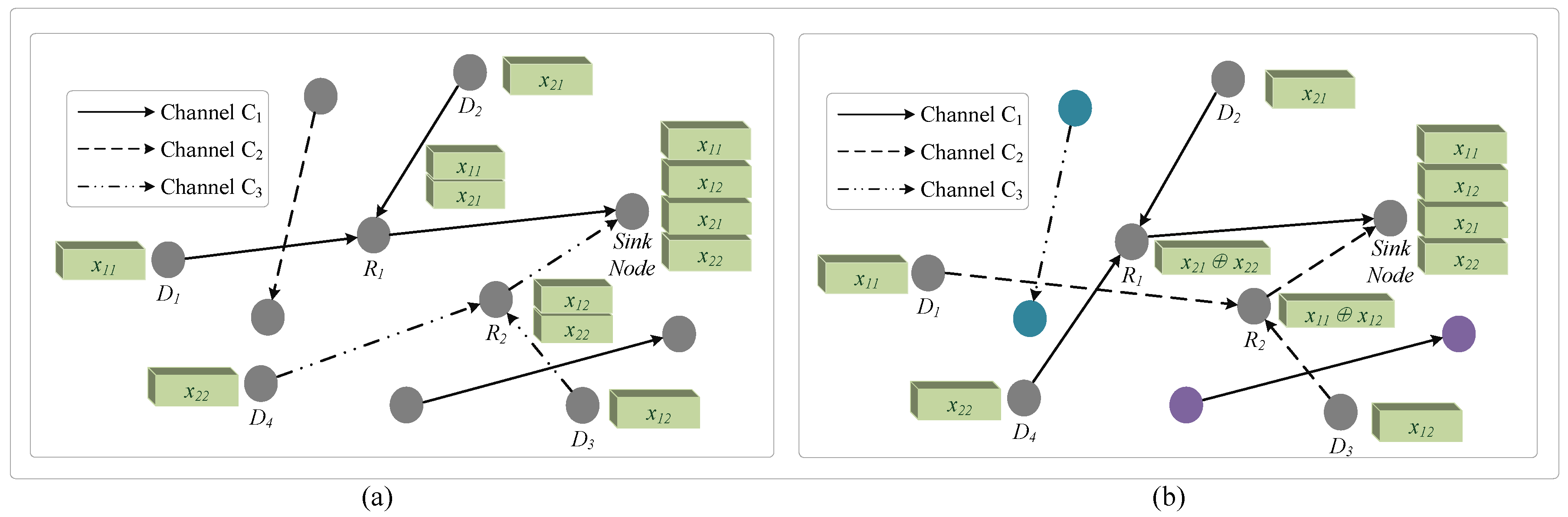
5.3. Network Coding Mechanism in the Process of Transmission
5.4. Algorithm Description and Analysis
| Algorithm 1 CMNC |
| Input: |
| data content δ, |
| the channel set , |
| the class set |
| Output: |
| the transmission strategy in the millimeter-meter network |
| 1: for the sensor node do |
| 2: for the sensor node data x do |
| 3: extract data content δ from the sensor node |
| 4: end for |
| 5: end for |
| 6: for the sensor node do |
| 7: for the data content δ do |
| 8: compare to the training set using Equations (18), (19), (20) |
| 9: end for |
| 10: end for |
| 11: calculate the combination of the BPA and the belief function of the sensor node by Equations (24), (25) |
| 12: for the sensor node do |
| 13: for the data content δ do |
| 14: get the maximize belief function as the basis of assigning class by Equation (28) |
| 15: end for |
| 16: end for |
| 17: get the class label by Equation (30) |
| 18: for the class set do |
| 19: for the channel set do |
| 20: compare the number of channels and classes |
| 21: if then |
| 22: running the high response priority assignment method |
| 23: calculate the of the class by using Equation (32) |
| 24: else |
| 25: sequentially assigned to channel |
| 26: end if |
| 27: end for |
| 28: end for |
| 29: assign the channel to the corresponding class |
| 30: for each class ω do |
| 31: for the sensor node D belongs to the same class do |
| 32: get the neighborList |
| 33: if neighborList[] = 1 then |
| 34: some data have been gotten |
| 35: else |
| 36: some data have not been gotten |
| 37: end if |
| 38: end for |
| 39: end for |
| 40: obtain the data to be transferred |
| 41: generate a random linear encoding package |
| 42: for each class ω do |
| 43: for the sensor node D belong to the same class do |
| 44: transmit the linear encoding package |
| 45: if the receiver gets enough then |
| 46: decoding package and gets the original data |
| 47: else |
| 48: continue to receive |
| 49: end if |
| 50: end for |
| 51: end for |
6. Simulations and Results
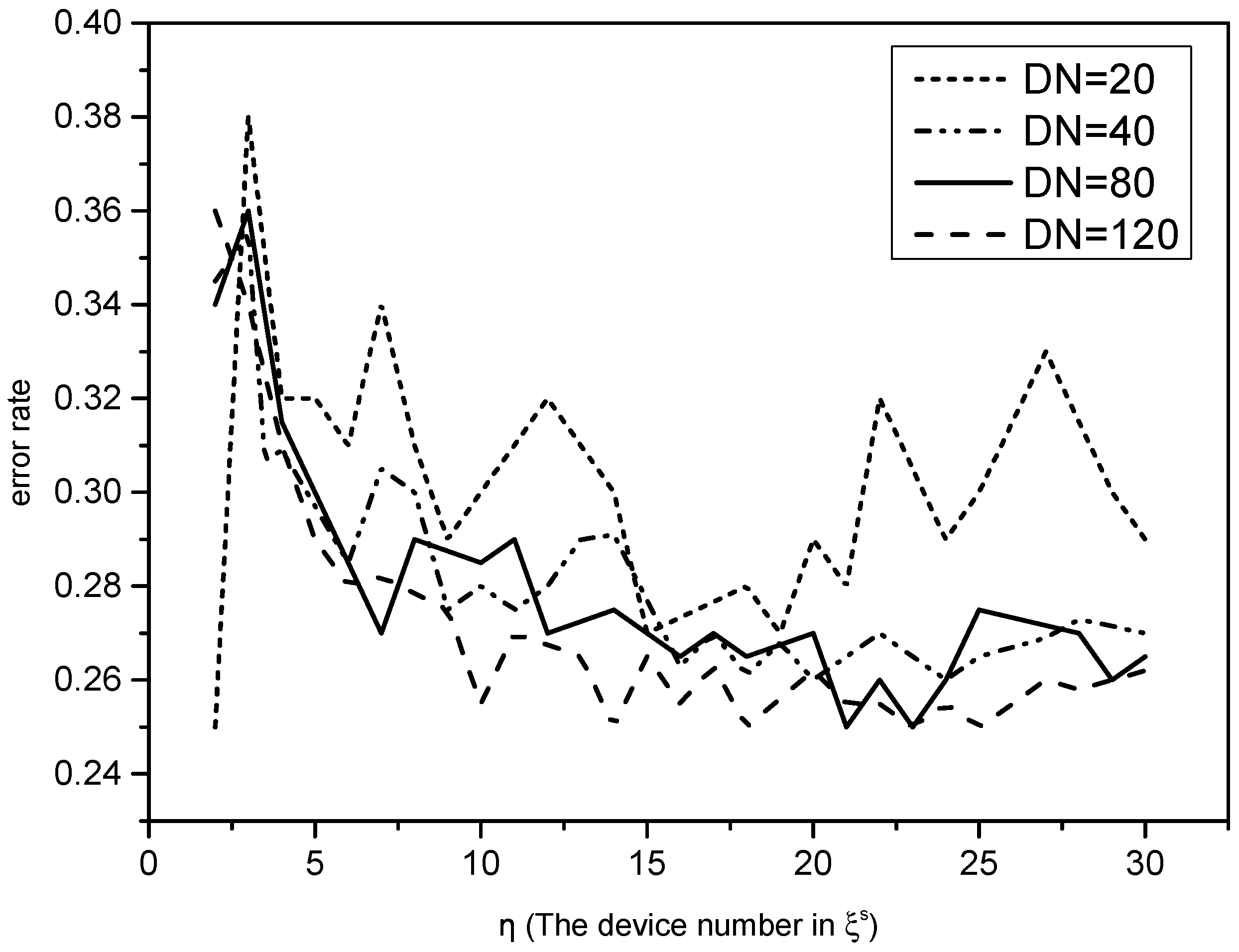
6.1. Performance of the Fusion-Driven Model Based on D-S Evidence Theory
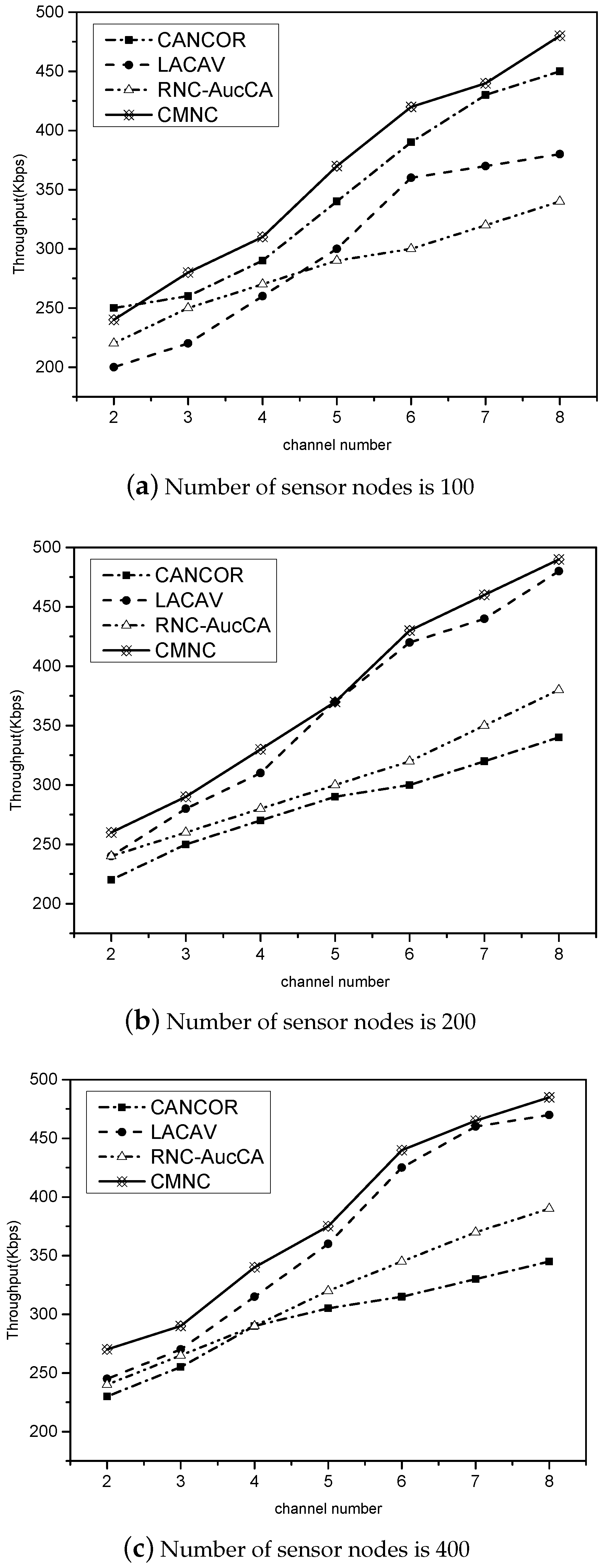
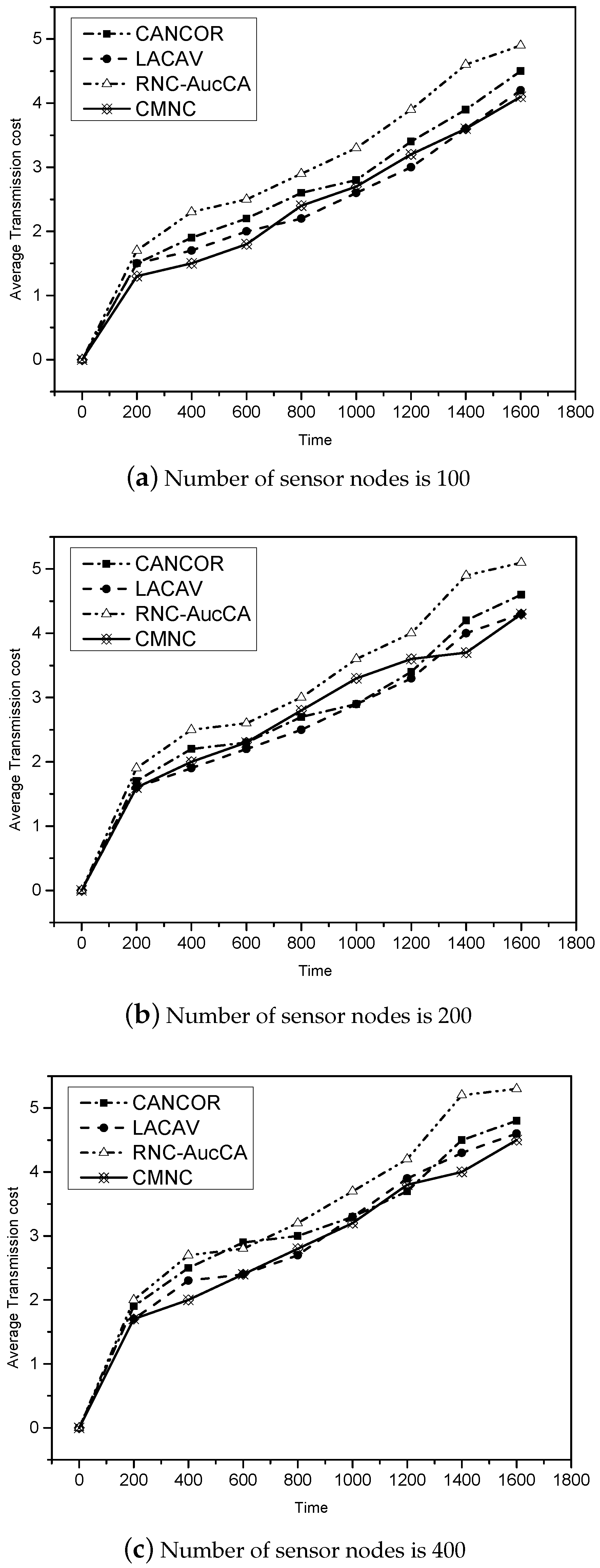
6.2. Performance of the CMNC Algorithm
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lin, K.; Chen, M.; Deng, J.; Hassan, M.M.; Fortino, G. Enhanced fingerprinting and trajectory prediction for IoT localization in smart buildings. IEEE Trans. Autom. Sci. Eng. 2016, 13, 1–14. [Google Scholar] [CrossRef]
- Gohil, A.; Hitesh, M.; Patel, S.K. 5G technology of mobile communication: A survey. In Proceedings of the 2013 International Conference on Intelligent Systems and Signal Processing (ISSP), Gujarat, India, 1–2 March 2013; pp. 288–292.
- Lin, K.; Wang, W.; Wang, X.; Ji, W.; Wan, J. QoE-driven spectrum assignment for 5G wireless networks using SDR. IEEE Wirel. Commun. 2015, 22, 48–55. [Google Scholar] [CrossRef]
- Rappaport, T.S.; Sun, S.; Mayzus, R.; Zhao, H.; Azar, Y.; Wang, K.; Wong, G.N.; Schulz, J.K.; Samimi, M.; Gutierrez, F. Millimeter wave mobile communications for 5G cellular: It will work! IEEE Access 2013, 1, 335–349. [Google Scholar] [CrossRef]
- Rangan, S.; Rappaport, T.S.; Erkip, E. Millimeter-wave cellular wireless networks: Potentials and challenges. Proc. IEEE 2014, 102, 366–385. [Google Scholar] [CrossRef]
- Niu, Y.; Li, Y.; Jin, D.; Su, L.; Vasilakos, A.V. A survey of millimeter wave communications (mmWave) for 5G: Opportunities and challenges. Wirel. Netw. 2015, 21, 2657–2676. [Google Scholar] [CrossRef]
- Muhammad, S.; Nardi, D.; Ohno, K.; Tadokoro, S. Environmental sensing using millimeter wave sensor for extreme conditions. In Proceedings of the 2015 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), West Lafayette, IN, USA, 18–20 October 2015; pp. 1–7.
- Wei, L.; Hu, R.; Qian, Y.; WU, G. Key elements to enable millimeter wave communications for 5G wireless systems. IEEE Wirel. Commun. 2014, 21, 136–143. [Google Scholar]
- Mekikis, P.V.; Antonopoulos, A.; Kartsakli, E.; Lalos, A.S.; Alonso, L.; Verikoukis, C. Information exchange in randomly deployed dense WSNs with wireless energy harvesting capabilities. IEEE Trans. Wirel. Commun. 2016, 15, 3008–3018. [Google Scholar] [CrossRef]
- Murali, N.; Hossein, B. Network coding applications for 5G millimeter-wave communications. Netw. Internet Archit. 2015; arXiv:1512.03031. [Google Scholar]
- Antonopoulos, A.; Verikoukis, C. Multi-player game theoretic MAC strategies for energy efficient data dissemination. IEEE Trans. Wirel. Commun. 2014, 13, 592–603. [Google Scholar] [CrossRef]
- Shafieinejad, A.; Hendessi, F.; Fekri, F. Network coding for multiple unicast sessions in multi-channel/interface wireless networks. Wirel. Netw. 2013, 19, 891–911. [Google Scholar] [CrossRef]
- Sun, Y.; Yang, Y.; Li, Y.; Zhang, Y. Full diversity reception based on dempster-shafer theory for network coding with multiple-antennas relay. China Commun. 2015, 12, 76–90. [Google Scholar] [CrossRef]
- Dempster, A.P. Upper and lower probabilities induced by a multivalued mapping. Ann. Math. Stat. 1967, 38, 325–339. [Google Scholar] [CrossRef]
- Shafer, G. A Mathematical Theory of Evidence; Princeton University Press: Princeton, NJ, USA, 1976; Volume 1. [Google Scholar]
- Ranoeliarivao, S.; Morsier, F.D.; Tuia, D.; Rakotoniaina, S.; Borgeaud, M.; Thiran, J.-P.; Rakotondraompiana, S. Multisource clustering of remote sensing images with entropy-based Dempster-Shafer fusion. In Proceedings of the 21st European Signal Processing Conference (EUSIPCO), Marrakech, Morocco, 9–13 September 2013; pp. 1–5.
- Ghasemi, J.; Ghaderi, R.; Karami Mollaeia, M.R.; Hojjatoleslamib, S.A. A novel fuzzy Dempster-Shafer inference system for brain MRI segmentation. Inf. Sci. 2013, 223, 205–220. [Google Scholar] [CrossRef]
- Luo, R.C.; Chun, C.L. Multisensor fusion-based concurrent environment mapping and moving object detection for intelligent service robotics. IEEE Trans. Ind. Electron. 2014, 61, 4043–4051. [Google Scholar] [CrossRef]
- Zhu, H.; Basir, O. A scheme for constructing evidence structures in Dempster-Shafer evidence theory for data fusion. Comput. Intell. Robot. Autom. 2003, 2, 960–965. [Google Scholar]
- Qin, L.; Li, Y.; He, Z.; Lin, J.; Lu, Y. Cooperative signal processing scheme for multiple-cell based on evidence theory. In Proceedings of the 8th International ICST Conference on Communications and Networking in China (CHINACOM), Guilin, China, 4–16 August 2013; pp. 643–647.
- Kessentini, Y.; Burger, T.; Paquet, T. A Dempster-Shafer theory based combination of handwriting recognition systems with multiple rejection strategies. Pattern Recognit. 2015, 48, 534–544. [Google Scholar] [CrossRef]
- Dong, G.; Kuang, G. Target recognition via information aggregation through Dempster-Shafer’s evidence theory. Geosci. Remote Sens. Lett. 2015, 12, 1247–1251. [Google Scholar] [CrossRef]
- Gruska, D. Network information flow. IEEE Trans. Inf. Theory 2006, 72, 167–180. [Google Scholar]
- Torres Compta, P.; Fitzek, F.H.P.; Lucani, D.E. Network coding is the 5G key enabling technology: Effects and strategies to manage heterogeneous packet lengths. Trans. Emerg. Telecommun. Technol. 2015, 26, 46–55. [Google Scholar] [CrossRef]
- Leu, J.; Yu, M.; Yueh, H. Improving network coding based file sharing for unstructured peer-to-peer networks. J. Netw. Syst. Manag. 2015, 23, 803–829. [Google Scholar] [CrossRef]
- Jiang, D.; Xua, Z.; Li, W.; Chen, Z. Network coding-based energy-efficient multicast routing algorithm for multi-hop wireless networks. J. Syst. Softw. 2015, 104, 152–165. [Google Scholar] [CrossRef]
- Antonopoulos, A.; Verikoukis, C.; Skianis, C.; Akan, O.B. Energy efficient network coding-based MAC for cooperative ARQ wireless networks. Ad Hoc Netw. 2013, 11, 190–200. [Google Scholar] [CrossRef]
- Antonopoulos, A.; Lalos, A.S.; Renzo, M.D.; Verikoukis, C. Cross-layer theoretical analysis of NC-aided cooperative ARQ protocols in correlated shadowed environments. IEEE Trans. Veh. Technol. 2015, 64, 4074–4087. [Google Scholar] [CrossRef]
- Lin, K.; Song, J.; Luo, J.; Ji, W.; Hossain, S.; Ghoneim, A. GVT: Green video transmission in the mobile cloud networks. IEEE Trans. Circuits Syst. Video Technol. 2016. [Google Scholar] [CrossRef]
- Wu, Y.; Stankovic, J.A.; He, T.; Lu, J.; Lin, S. Realistic and efficient multi-channel communications in wireless sensor networks. In Proceedings of the 27th Conference on Computer Communications, INFOCOM 2008, Phoenix, AZ, USA, 13–18 April 2008.
- Phung, K.; Lemmens, B.; Goossens, M.; Nowe, A.; Tran, L.; Steenhaut, K. Schedule-based multi-channel communication in wireless sensor networks: A complete design and performance evaluation. Ad Hoc Netw. 2015, 26, 88–102. [Google Scholar] [CrossRef]
- Khemapech, I.; Miller, A.; Duncan, I. A survey of transmission power control in wireless sensor networks. In Proceedings of the 8th Annual Postgraduate Symposium on the Convergence of Telecommunications, Networking and Broadcasting, Liverpool, UK, 28–29 June 2007; pp. 15–20.
- Pi, Z.Y.; Khan, F. An introduction to millimeter-wave mobile broadband systems. IEEE Commun. Mag. 2011, 49, 101–107. [Google Scholar] [CrossRef]
- Ho, T.; Médard, M.; Koetter, R.; Karger, D.R.; Effros, M.; Shi, J.; Leong, B. A random linear network coding approach to multicast. IEEE Trans. Inf. Theory 2006, 52, 4413–4430. [Google Scholar] [CrossRef]
- Qin, Y.; Zhong, X.; Yang, Y.; Li, L.; Ye, Y. Combined channel assignment and network coded opportunistic routing in cognitive radio networks. Comput. Electr. Eng. 2015, 52, 293–306. [Google Scholar] [CrossRef]
- Misra, S.; Krishna, P.V.; Saritha, V. LACAV: An energy-efficient channel assignment mechanism for vehicular ad hoc networks. J. Supercomput. 2012, 62, 1241–1262. [Google Scholar] [CrossRef]
- Chieochan, S.; Hossian, E. Channel assignment for throughput optimization in multichannel multiradio wireless mesh networks using network coding. IEEE Trans. Mob. Comput. 2013, 12, 118–135. [Google Scholar] [CrossRef]







© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, K.; Wang, D.; Hu, L. Content-Based Multi-Channel Network Coding Algorithm in the Millimeter-Wave Sensor Network. Sensors 2016, 16, 1023. https://doi.org/10.3390/s16071023
Lin K, Wang D, Hu L. Content-Based Multi-Channel Network Coding Algorithm in the Millimeter-Wave Sensor Network. Sensors. 2016; 16(7):1023. https://doi.org/10.3390/s16071023
Chicago/Turabian StyleLin, Kai, Di Wang, and Long Hu. 2016. "Content-Based Multi-Channel Network Coding Algorithm in the Millimeter-Wave Sensor Network" Sensors 16, no. 7: 1023. https://doi.org/10.3390/s16071023