
A MEMS Resonant Sensor to Measure Fluid Density and Viscosity under Flexural and Torsional Vibrating Modes

Abstract
:1. Introduction
2. Theory and Simulation
2.1. Measurement Theory
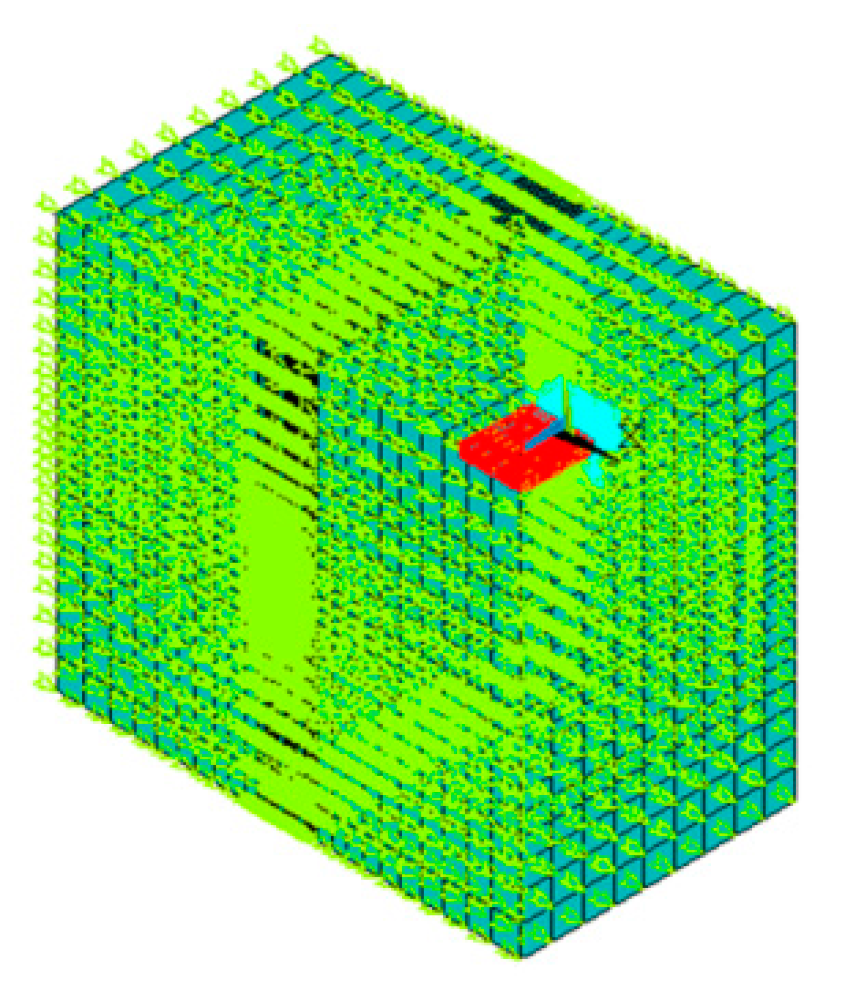
2.2. Fluid-Structure Interaction Simulation
3. Fabrication and Experiment
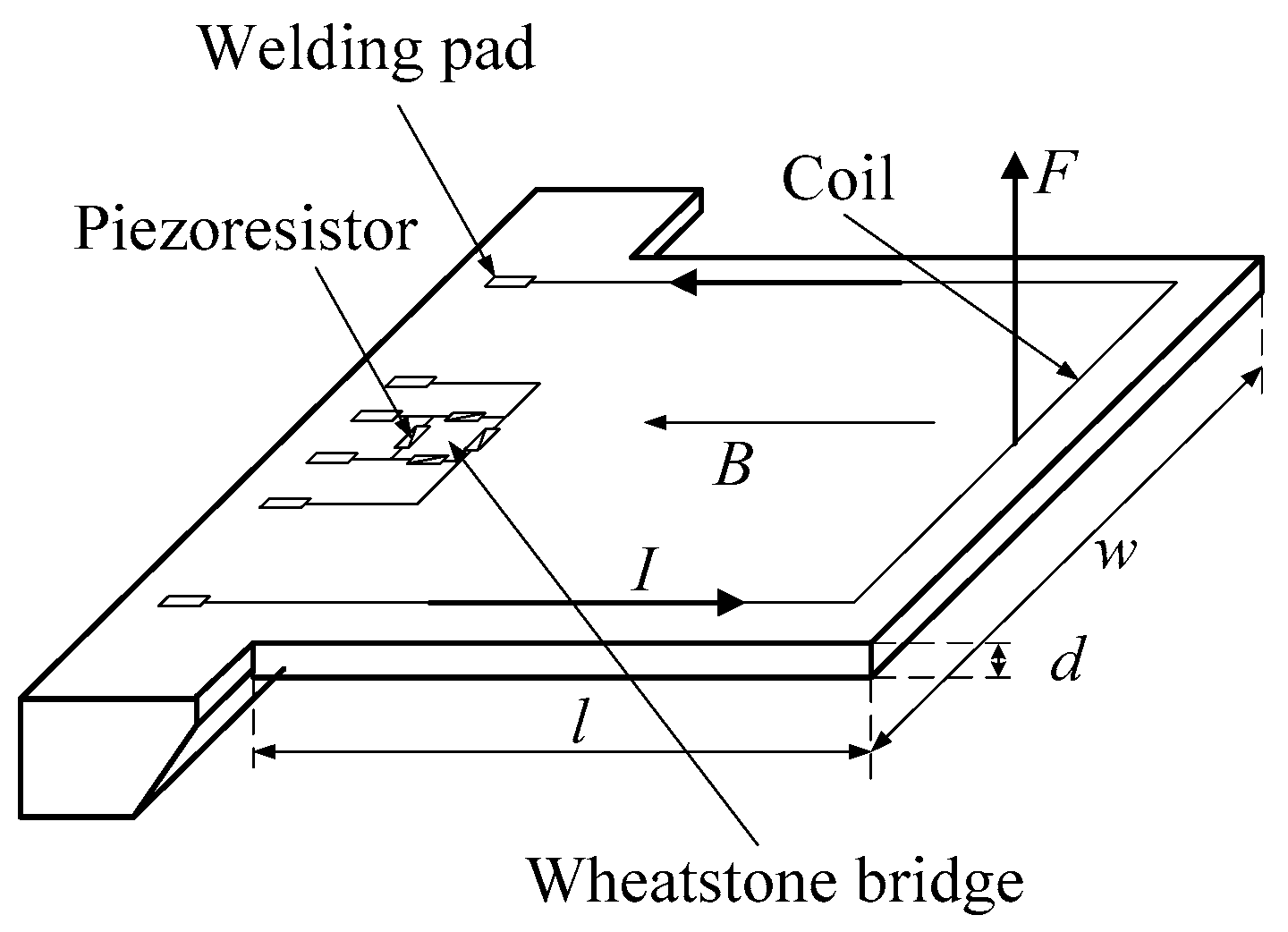
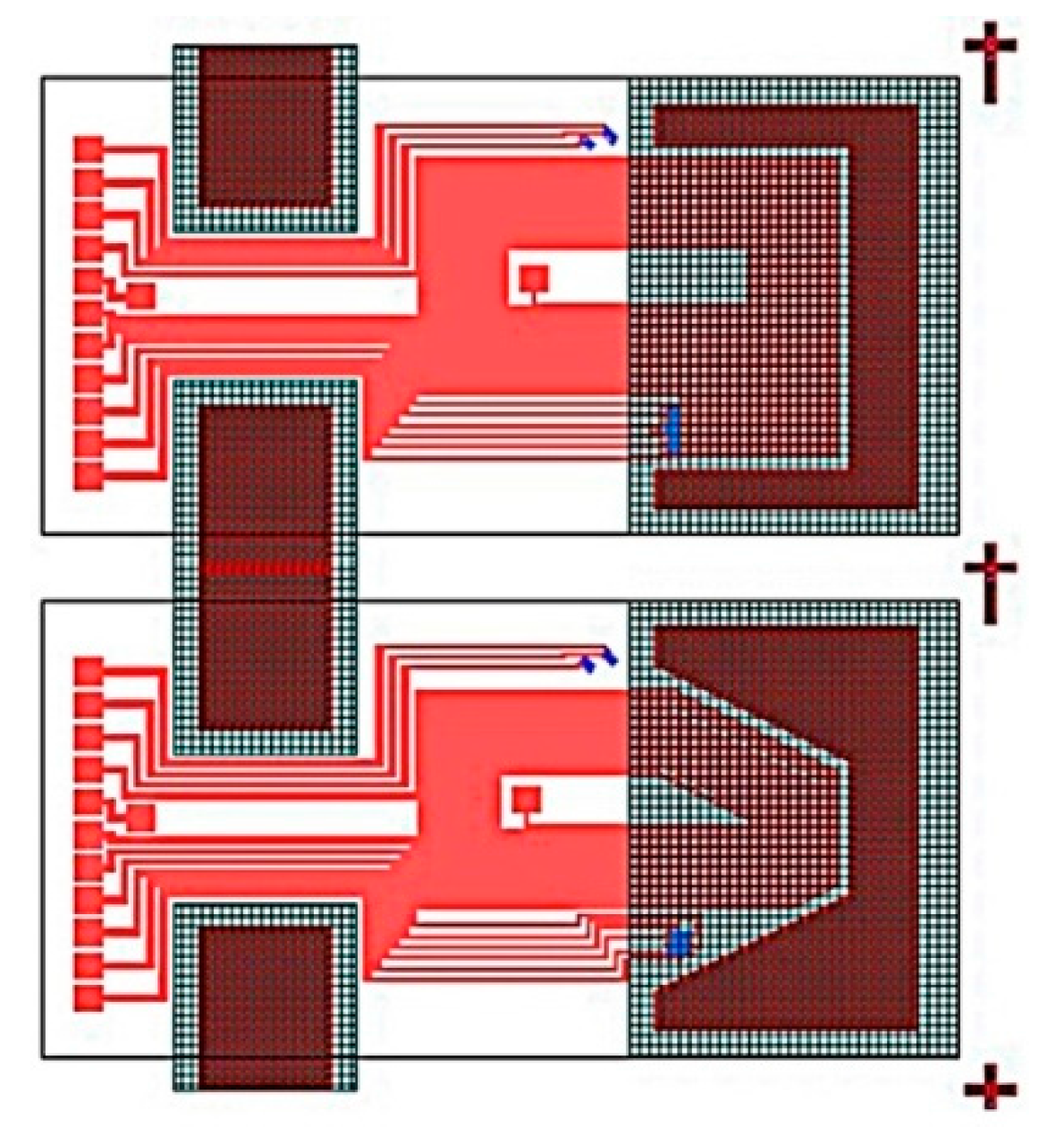
3.1. Microcantilever Design
3.2. The Experimental System
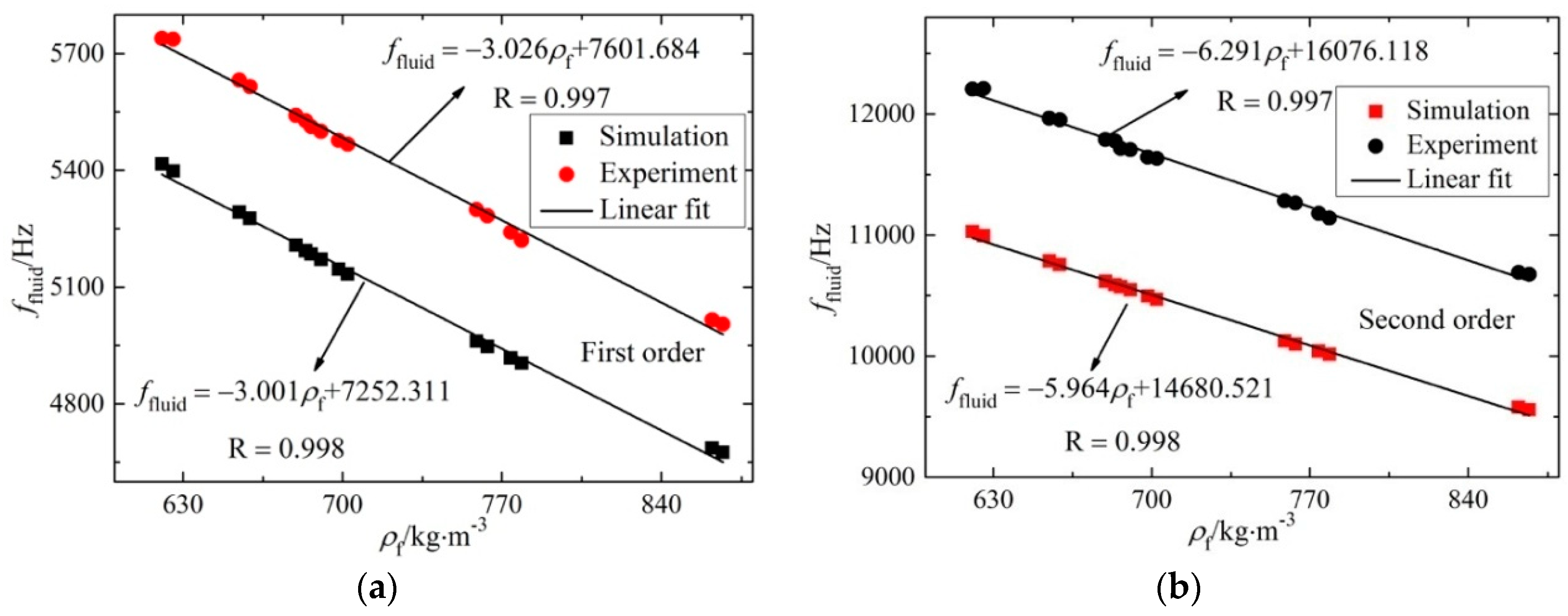
4. Results and Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Harrison, C.; Ryu, S.; Goodwin, A.; Hsu, K.; Donzier, E.; Marty, F.; Mercier, B. A MEMS sensor for the measurement of density-viscosity for oilfield applications. In Proceedings of the Reliability, Packaging, Testing, and Characterization of MEMS/MOEMS V, San Jose, CA, USA, 25–26 January 2006.
- Markova, L.V.; Makarenko, V.M.; Semenyuk, M.S.; Zozulya, A.P.; Kong, H.; Han, H.-G. A magnetoelastic viscometer for on-line monitoring of viscosity of lubricating oils. J. Frict. Wear 2011, 32, 41–48. [Google Scholar] [CrossRef]
- Jakoby, B.; Vellekoop, M.J. Physical sensors for liquid properties. IEEE Sens. J. 2011, 11, 3076–3085. [Google Scholar] [CrossRef]
- Smith, P.D.; Young, R.C.D.; Chatwin, C.R. A MEMS viscometer for unadulterated human blood. Measurement 2010, 43, 144–151. [Google Scholar] [CrossRef]
- Sparks, D.; Smith, R.; Straayer, M.; Cripe, J.; Schneider, R.; Chimbayo, A.; Anasari, S.; Najafi, N. Measurement of density and chemical concentration using a microfluidic chip. Lab Chip 2003, 3, 19–21. [Google Scholar] [PubMed]
- Kim, H.J.; Kim, J.; Zandieh, O.; Chae1, M.-S.; Kim, T.S.; Lee, J.H.; Park, J.H.; Kim, S.; Hwang, K.S. Piezoelectric layer embedded-microdiaphragm sensors for the determination of blood viscosity and density. Appl. Phys. Lett. 2014, 105. [Google Scholar] [CrossRef]
- Fedorchenko, A.I.; Stachiv, I.; Wang, W.C. Method of the viscosity measurement by means of the vibrating micro-/nano-mechanical resonators. Flow Meas. Instrum. 2013, 32, 84–89. [Google Scholar] [CrossRef]
- Hur, D.; Lee, J.H. Determination of Liquid Density and Viscosity Using a Self-Actuating Microcantilever. Jpn. J. Appl. Phys. 2013, 52. [Google Scholar] [CrossRef]
- Etchart, I.; Chen, H.; Dryden, P.; Jundt, J.; Harrison, C.; Hsu, K.; Marty, F.; Mercier, B. MEMS sensors for density-viscosity sensing in a low-flow microfluidic environment. Sens. Actuators A Phys. 2008, 141, 266–275. [Google Scholar] [CrossRef]
- Toledo, J.; Manzaneque, T.; Ruiz-Diez, V.; Pfusterschmied, G.; Wistrela, E.; Steindl, W.; Schmid, U.; Sánchez-Rojas, J.L. Piezoelectric MEMS resonators for density and viscosity sensing in engine oil with diesel fuel. In Proceedings of the Transducers—18th International Conference on Solid-State Sensors, Actuators and Microsystems, Anchorage, AK, USA, 21–25 June 2015; pp. 436–439.
- Oden, P.I.; Chen, G.Y.; Steele, R.A.; Warmack, R.J.; Thundat, T. Viscous drag measurements utilizing microfabricated cantilevers. Appl. Phys. Lett. 1996, 68. [Google Scholar] [CrossRef]
- Ahmed, N.; Nino, D.F.; Moy, V.T. Measurement of solution viscosity by atomic force microscopy. Rev. Sci. Instrum. 2001, 72. [Google Scholar] [CrossRef]
- Papi, M.; Arcovito, G.; De Spirito, M.; Vassalli, M.; Tiribilli, B. Fluid viscosity determination by means of uncalibrated atomic force microscopy cantilevers. Appl. Phys. Lett. 2006, 88. [Google Scholar] [CrossRef]
- Goodwin, A.R.H.; Donzier, E.P.; Vancauwenberghe, O.; Fitt, A.D.; Ronaldson, K.A.; Wakeham, W.A.; de Lara, M.M.; Marty, F.; Mercier, B. A Vibrating Edge Supported Plate, Fabricated by the Methods of Micro Electro Mechanical System for the Simultaneous Measurement of Density and Viscosity: Results for Methylbenzene and Octane at Temperatures between (323 and 423) K and Pressures in the range (0.1–68) MPa. J. Chem. Eng. Data 2006, 51, 190–208. [Google Scholar]
- Goodwin, A.R.H.; Jakeways, C.V.; De Lara, M.M. A MEMS Vibrating Edge Supported Plate for the Simultaneous Measurement of Density and Viscosity: Results for Nitrogen, Methylbenzene, Water, 1-Propene, 1,1,2,3,3,3-hexafluoro-oxidized-polymd, and Polydimethylsiloxane and Four Certified Reference Materials with Viscosities in the Range (0.038 to 275) mPa·s and Densities between (408 to 1834) kg·m−3 at Temperatures from (313 to 373) K and Pressures up to 60 MPa. J. Chem. Eng. Data 2008, 53, 1436–1443. [Google Scholar]
- Boudjiet, M.T.; Bertrand, J.; Mathieu, F.; Nicu, L.; Mazenq, L.; Leïchlé, T.; Heinrich, S.M.; Pellet, C.; Dufour, I. Geometry optimization of uncoated silicon microcantilever-based gas density sensors. Sens. Actuators B Chem. 2015, 208, 600–607. [Google Scholar] [CrossRef]
- Ansari, M.Z.; Cho, C.; Kim, J.; Bang, B. Comparison between deflection and vibration characteristics of rectangular and trapezoidal profile microcantilevers. Sensors 2009, 9, 2706–2718. [Google Scholar] [CrossRef] [PubMed]
- Luckluma, F.; Reichel, E.K.; Jakoby, B. Miniature density-viscosity measurement cell utilizing electrodynamic-acoustic resonator sensors. Sens. Actuators A Phys. 2011, 172, 75–81. [Google Scholar] [CrossRef]
- Jin, D.; Li, X.; Liu, J.; Zuo, G.; Wang, Y.; Liu, M.; Yu, H. High-mode resonant piezoresistive cantilever sensors for tens-femtogram resoluble mass sensing in air. J. Micromech. Microeng. 2006, 16, 1017–1023. [Google Scholar] [CrossRef]
- Manzaneque, T.; Ruiz-Díez, V.; Hernando-García, J.; Wistrela, E.; Kucera, M.; Schmid, U.; Sánchez-Rojas, J.L. Piezoelectric MEMS resonator-based oscillator for density and viscosity sensing. Sens. Actuators A Phys. 2014, 220, 305–315. [Google Scholar] [CrossRef]
- McFarland, A.W.; Poggi, M.A.; Bottomley, L.A.; Colton, J.S. Characterization of microcantilevers solely by frequency response acquisition. J. Micromech. Microeng. 2005, 15, 785–791. [Google Scholar] [CrossRef]
- Timoshenko, S.P.; Goodier, J.N.; Abramson, H.N. Theory of Elasticity; McGraw-Hill: New York, NY, USA, 1970. [Google Scholar]
- Sader, J.E. Frequency response of cantilever beams immersed in viscous fluids with applications to the atomic force microscope. J. Appl. Phys. 1998, 84, 64–76. [Google Scholar] [CrossRef]
- Chu, W.H. Tech Rep No. 2, DTMB, Contract NObs-86396 (X); Southwest Research Institute: San Antonio, TX, USA, 1963. [Google Scholar]
- Green, C.P.; Sader, J.E. Torsional frequency response of cantilever beams immersed in viscous fluids with applications to the atomic force microscope. J. Appl. Phys. 2002, 92, 6262–6274. [Google Scholar] [CrossRef]
- Wilson, T.L.; Campbell, G.A.; Mutharasan, R. Viscosity and density values from excitation level response of piezoelectric-excited cantilever sensors. Sens. Actuators A Phys. 2007, 138, 44–51. [Google Scholar] [CrossRef]
- Ikehara, T.; Lu, J.; Konno, M.; Maeda, R.; Mihara, T. A high quality-factor silicon cantilever for a low detection-limit resonant mass sensor operated in air. J. Micromech. Microeng. 2007, 17. [Google Scholar] [CrossRef]
- Zhang, G.; Zhao, L.; Jiang, Z.; Yang, S.; Zhao, Y.; Huang, E.; Hebibul, R.; Liu, Z. Surface stress-induced deflection of a microcantilever with various widths and overall microcantilever sensitivity enhancement via geometry modification. J. Phys. D Appl. Phys. 2011, 44. [Google Scholar] [CrossRef]
- Corman, T.; Enoksson, P. A low-pressure encapsulated resonant fluid density sensor with feedback control electronics. Meas. Sci. Technol. 2000, 11. [Google Scholar] [CrossRef]
- Xu, L.; Zhang, G.; Zhao, L.; Jiang, Z.; Wang, H.; Liu, Z. A fluid viscosity sensor with resonant trapezoidal micro cantilever. In Proceedings of the IEEE International Symposium on Assembly and Manufacturing (ISAM), Xi’an, China, 30 July–2 August 2013; pp. 131–134.
- Stanwix, P.L.; Locke, C.R.; Hughes, T.J.; Johns, M.L.; Goodwin, A.R.H.; Marsh, K.N.; May, E.F. Viscosity of {xCH4 + (1 − x)C3H8} with x = 0.949 for Temperatures between (200 and 423) K and Pressures between (10 and 31) MPa. J. Chem. Eng. Data 2014, 60, 118–123. [Google Scholar] [CrossRef]
- Locke, C.R.; Stanwix, P.L.; Hughes, T.J.; May, E.F. Viscosity of {xCO2 + (1 − x)CH4} with x = 0.5174 for temperatures between (229 and 348) K and pressures between (1 and 32) MPa. J. Chem. Thermodyn. 2015, 87, 162–167. [Google Scholar] [CrossRef]
- Riesch, C.; Reichel, E.K.; Jachimowicz, A.; Schalko, J.; Jakoby, B.; Keplinger, F. A suspended plate viscosity sensor featuring in-plane vibration and piezoresistive readout. J. Micromech. Microeng. 2009, 19. [Google Scholar] [CrossRef]
- Cerimovic, S.; Beigelbeck, R.; Antlinger, H.; Schalko, J.; Jakoby, B.; Keplinger, F. Sensing viscosity and density of glycerol-water mixtures utilizing a suspended plate mems resonator. Microsyst. Technol. 2012, 18, 1045–1056. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fluid | T (K) | ffluid (Hz) | Q | ρref (kg·m−3) | ρf (kg·m−3) | ηref (μPa·s) | ηf (μPa·s) |
|---|---|---|---|---|---|---|---|
| n-pentane | 293.15 | 5737.16 | 38.18 | 625.75 | 621.32 | 227.5 | 175.7 |
| 298.15 a | 5738.98 | 34.75 | 620.83 | 620.83 | 217.9 | 217.9 | |
| n-hexane | 293.15 | 5615.55 | 32.68 | 659.36 | 655.55 | 312.3 | 253 |
| 298.15 | 5632.09 | 30.95 | 654.78 | 650.76 | 296.3 | 285.4 | |
| n-heptane | 293.15 | 5527.5 | 29.01 | 683.82 | 681.75 | 411.4 | 333.1 |
| 298.15 | 5541.15 | 29.17 | 679.6 | 677.6 | 388.5 | 328.5 | |
| isooctane | 293.15 | 5500.02 | 25.63 | 690.6 | 690.18 | 506.1 | 438.6 |
| 298.15 | 5512.56 | 25.25 | 686.3 | 686.32 | 478.6 | 452.8 | |
| n-octane | 293.15 | 5466.83 | 24.53 | 702.29 | 700.54 | 542 | 484.6 |
| 298.15 | 5476.98 | 25.74 | 698.27 | 697.35 | 509.7 | 435.7 | |
| silicone oil (0.65 cs) | 293.15 | 5283.39 | 27.41 | 763.61 | 761.36 | 672.3 | 387.1 |
| 298.15 | 5299.43 | 28.39 | 758.87 | 755.79 | 650 | 357.5 | |
| cyclohexane | 293.15 | 5220.12 | 24.24 | 778.63 | 783.84 | 961.8 | 510.5 |
| 298.15 | 5240.91 | 25.99 | 773.89 | 776.36 | 884.7 | 437.3 | |
| methylbenzene | 293.15 | 5004.75 | 30.48 | 866.87 | 866.85 | 588 | 316 |
| 298.15 b | 5016.13 | 32.48 | 862.2 | 862.2 | 556 | 273.6 |
| Fluid | T (K) | ffluid (Hz) | Q | ρref (kg·m−3) | ρf (kg·m−3) | ηref (μPa·s) | ηf (μPa·s) |
|---|---|---|---|---|---|---|---|
| n-pentane | 293.15 | 12,210.45 | 75.63 | 625.75 | 620.32 | 227.5 | 218.9 |
| 298.15 a | 12,206.51 | 75.79 | 620.83 | 620.83 | 217.9 | 217.9 | |
| n-hexane | 293.15 | 11,951.80 | 66.11 | 659.36 | 655.08 | 312.3 | 293.1 |
| 298.15 | 11,964.81 | 67.54 | 654.78 | 653.28 | 296.3 | 280.1 | |
| n-heptane | 293.15 | 11,777.05 | 57.71 | 683.82 | 679.87 | 411.4 | 391.9 |
| 298.15 | 11,790.67 | 59.15 | 679.6 | 677.89 | 388.5 | 372.0 | |
| isooctane | 293.15 | 11,706.48 | 52.73 | 690.6 | 690.19 | 506.1 | 473.9 |
| 298.15 | 11,717.74 | 54.24 | 686.3 | 688.53 | 478.6 | 446.8 | |
| n-octane | 293.15 | 11,633.45 | 51.28 | 702.29 | 701.08 | 542 | 503.7 |
| 298.15 | 11,643.80 | 51.99 | 698.27 | 699.52 | 509.7 | 489.4 | |
| silicone oil (0.65 cs) | 293.15 | 11,264.99 | 54.17 | 763.61 | 759.26 | 672.3 | 609.2 |
| 298.15 | 11,282.02 | 54.63 | 758.87 | 756.45 | 650 | 587.6 | |
| cyclohexane | 293.15 | 11,141.85 | 39.38 | 778.63 | 780.01 | 961.8 | 888.3 |
| 298.15 | 11,178.47 | 41.91 | 773.89 | 773.77 | 884.7 | 779.9 | |
| methylbenzene | 293.15 | 10,675.39 | 50.59 | 866.87 | 865.21 | 588 | 543.2 |
| 298.15 b | 10,690.88 | 51.33 | 862.2 | 862.20 | 556 | 526.5 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Hu, Y.; Wang, T.; Ding, J.; Liu, X.; Zhao, Y.; Jiang, Z. A MEMS Resonant Sensor to Measure Fluid Density and Viscosity under Flexural and Torsional Vibrating Modes. Sensors 2016, 16, 830. https://doi.org/10.3390/s16060830
Zhao L, Hu Y, Wang T, Ding J, Liu X, Zhao Y, Jiang Z. A MEMS Resonant Sensor to Measure Fluid Density and Viscosity under Flexural and Torsional Vibrating Modes. Sensors. 2016; 16(6):830. https://doi.org/10.3390/s16060830
Chicago/Turabian StyleZhao, Libo, Yingjie Hu, Tongdong Wang, Jianjun Ding, Xixiang Liu, Yulong Zhao, and Zhuangde Jiang. 2016. "A MEMS Resonant Sensor to Measure Fluid Density and Viscosity under Flexural and Torsional Vibrating Modes" Sensors 16, no. 6: 830. https://doi.org/10.3390/s16060830