
Two-Dimensional DOA and Polarization Estimation for a Mixture of Uncorrelated and Coherent Sources with Sparsely-Distributed Vector Sensor Array


Abstract
:1. Introduction
- (1).
- The mutual coupling effects are alleviated benefiting from the reduced collocated antennas of each vector sensor.
- (2).
- The array aperture is extended by expanding the inter-sensor spacings beyond a half-wavelength.
2. Array Configuration and Problem Formulation
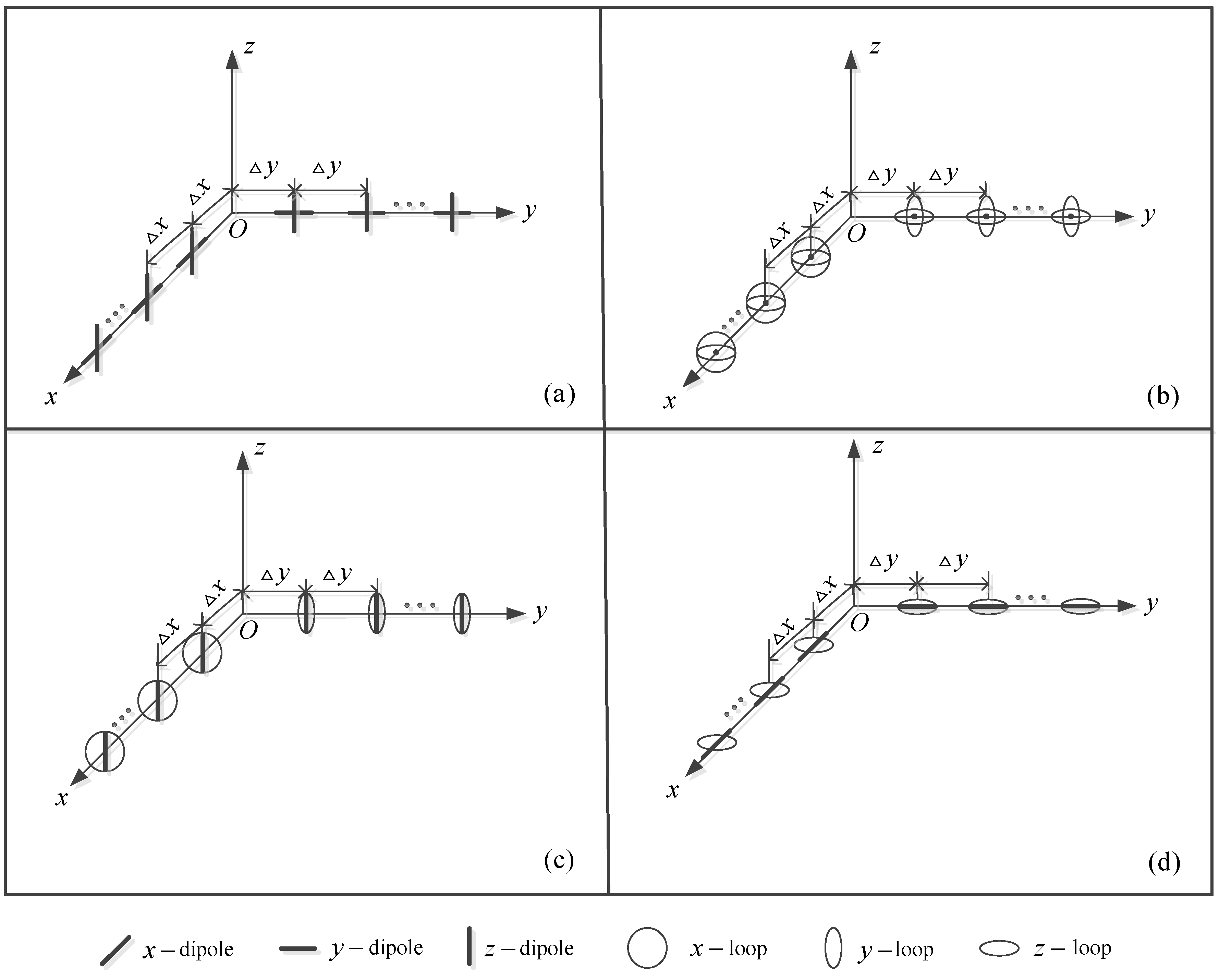
2.1. Array Configuration Used in This Work
- (1).
- x-dipoles or x-loops must be placed on the x-axis, and y-dipoles or y-loops must be placed on the y-axis.
- (2).
- If x-dipoles are placed on the x-axis, the corresponding y-dipoles are placed on the y-axis, and if x-loops are placed on the x-axis, the corresponding y-loops are placed on the y-axis.
- (3).
- z-dipoles or z-loops must be placed on the x-axis and y-axis simultaneously.
- (1).
- Since the proposed SD-VS array is composed of dipole-dipole, loop-loop, or dipole-loop antenna pairs, it only requires two collocated antennas for each vector sensor. Hence, the mutual coupling effects are alleviated greatly. Moreover, the antenna hardware costs are reduced.
- (2).
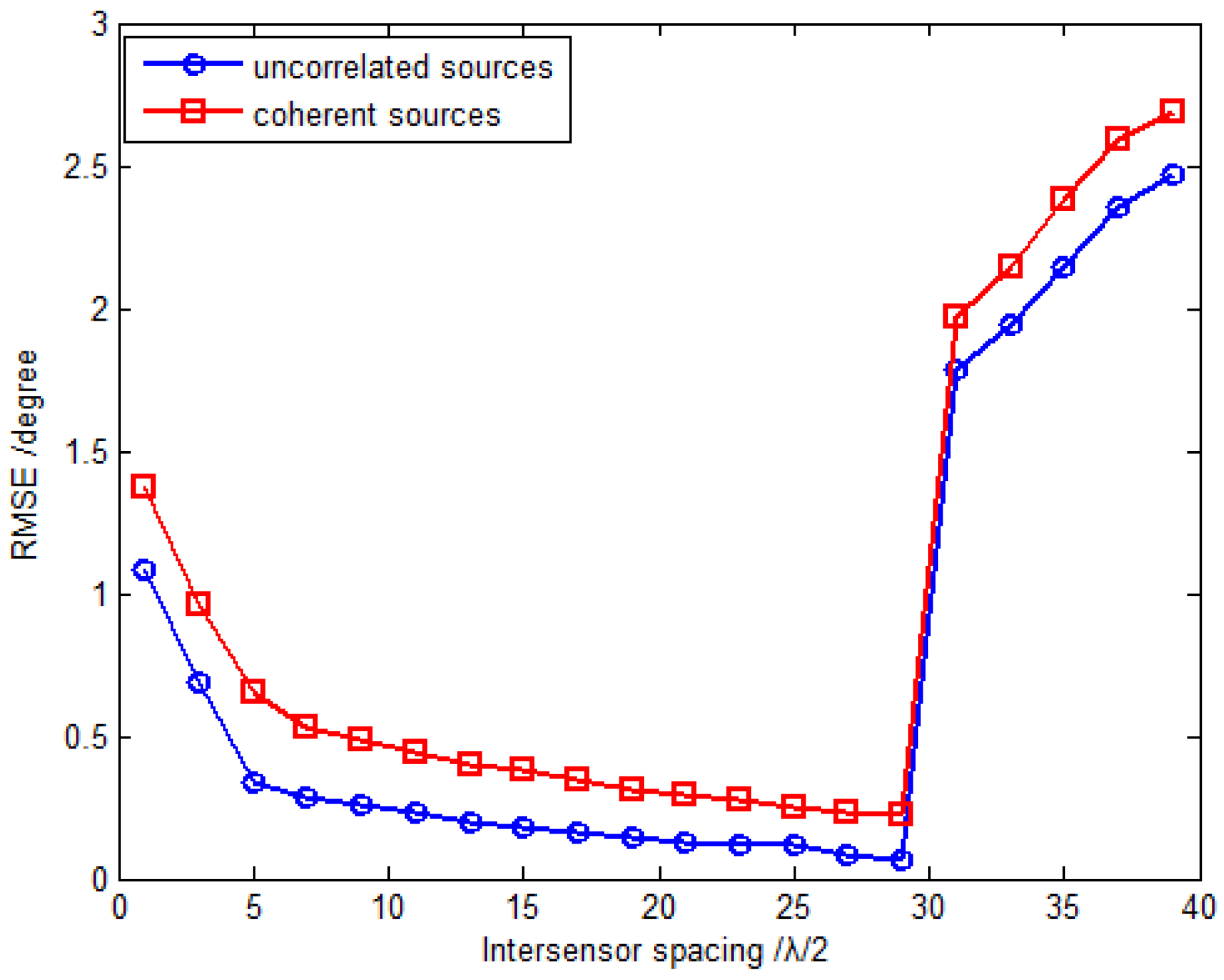
- The inter-sensor spacings are allowed beyond a half-wavelength, which results in an extended array aperture, and the DOA estimation accuracy is improved accordingly.
2.2. Problem for Mulation and Modeling
- (1).
- and are the two mutually uncorrelated zero-mean stationary Gaussian random processes.
- (2).
- Coherent sources from different coherent groups are uncorrelated with each other, and they are uncorrelated with the uncorrelated sources as well.
- (3).
3. 2-D Parameter Estimation
3.1. Distinguish Uncorrelated Sources from Coherent Sources
3.2. 2-D Parameter Estimation for Uncorrelated Sources
3.3. 2-D Parameter Estimation for Coherent Sources
4. Discussion
4.1. Individual Properties
- (1).
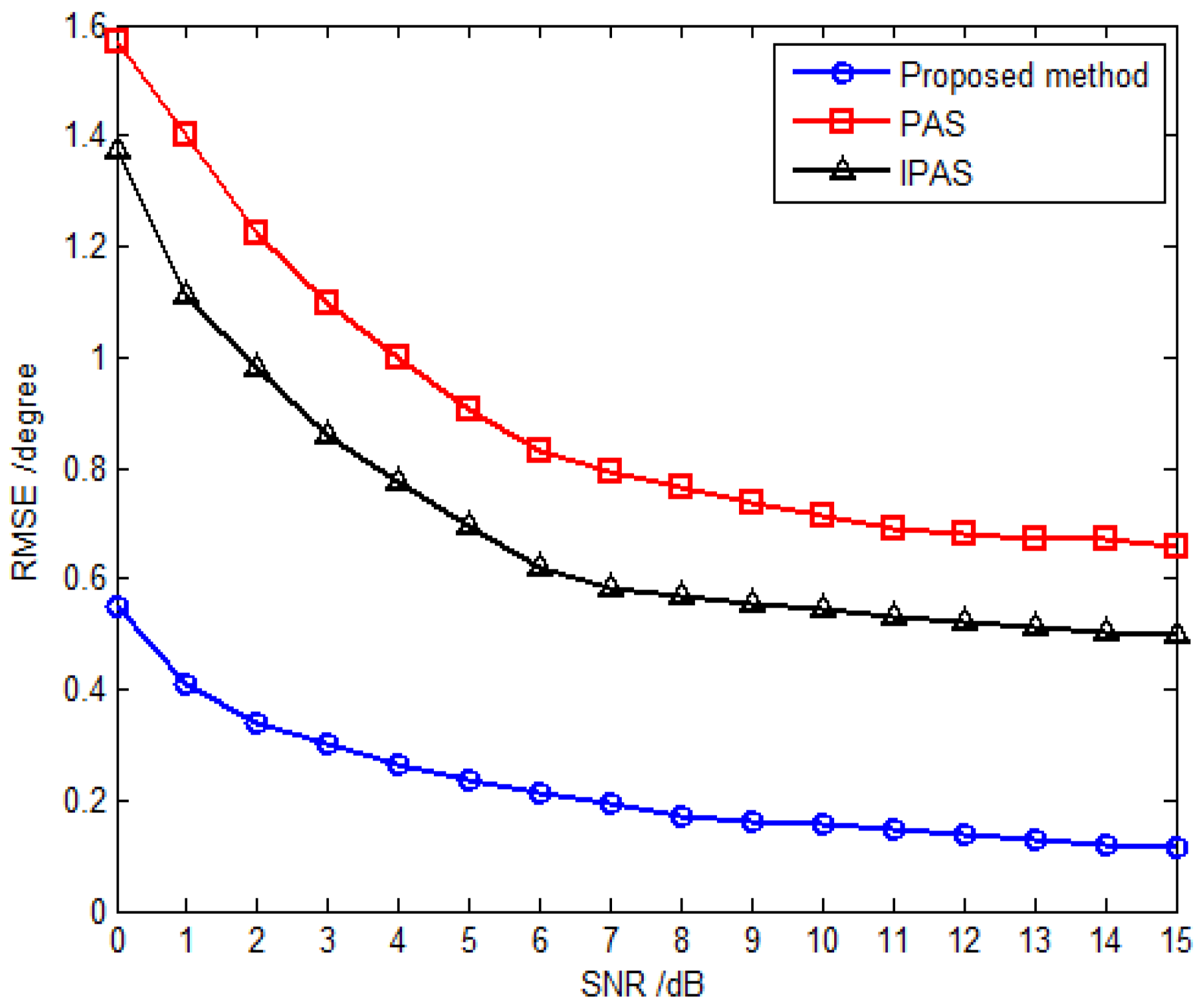
- Estimation of both DOA and polarization parameters. Different from the PAS and the IPAS methods, the proposed method can provide not only the DOA estimates, but also the polarization estimates which can be further utilized for target classification and recognition.
- (2).
- Extended array aperture. The proposed method extends the effective array aperture from two aspects: (1) separating the uncorrelated sources from the coherent sources; (2) extending the inter-sensor spacings beyond a half-wavelength. By contrast, the PAS and IPAS methods are restricted to the spatial Nyquist sampling theorem, that is, the inter-sensor spacing must be no more than a half-wavelength. Thus, the proposed method has a comparatively extended array aperture which enhances the estimation accuracy accordingly.
- (3).
- Reduction in mutual coupling effects and antenna hardware costs. Compared with the spatially collocated six-component vector sensor array used in the existing methods, the number of collocated antennas of the proposed L-shaped SD-VS array is reduced from six to two, which significantly reduces the mutual coupling effects. In addition, the antenna hardware costs are reduced.
- (4).
- Adaptation to SD-VS array with different antenna compositions. The proposed method is applicable to four different antenna compositions as shown in Table 1, not limited to a unique antenna composition, which makes it more suitable for the practical situations.
4.2. Computational Complexity
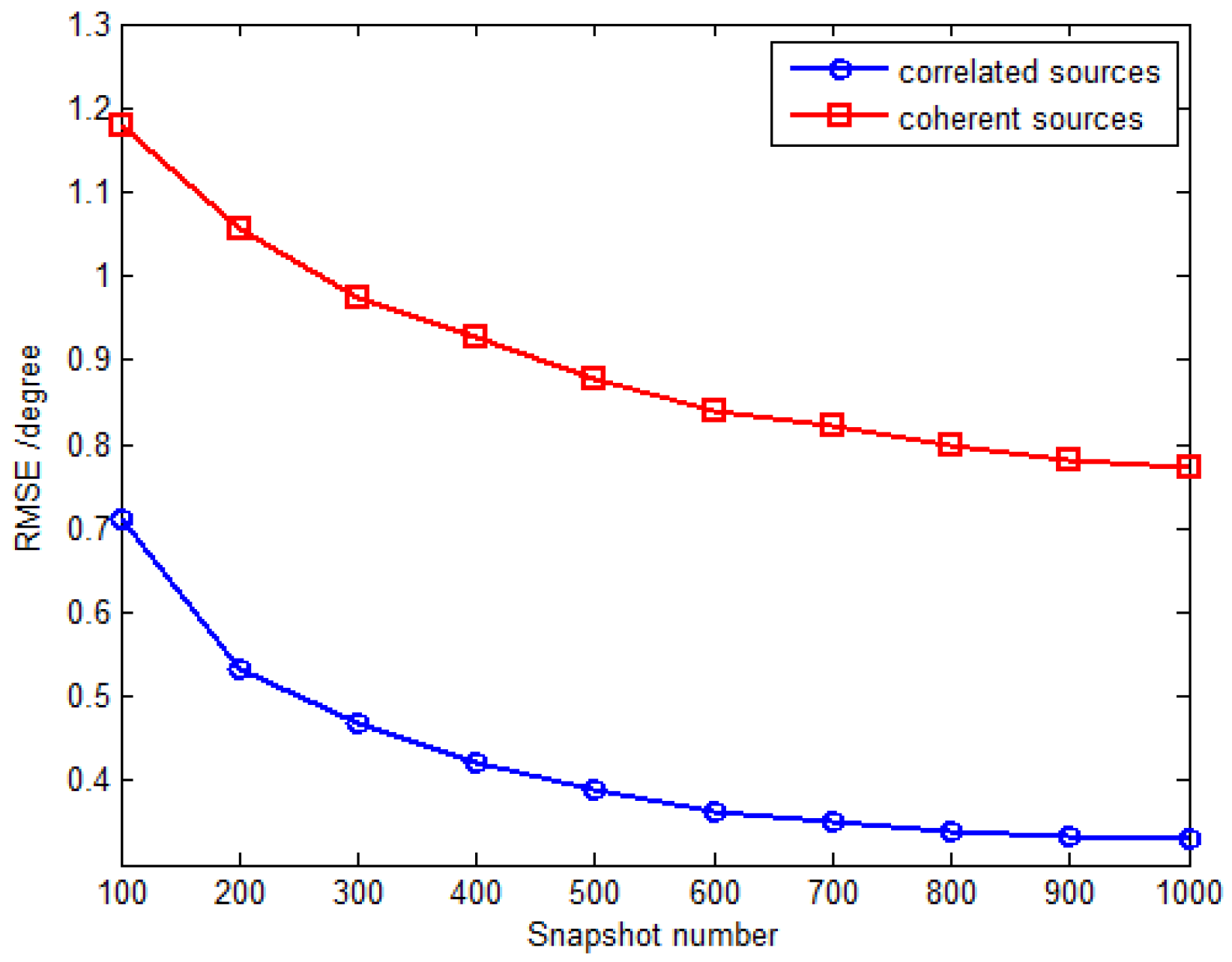
4.3. Extension to the Coexistence of Correlated and Coherent Sources
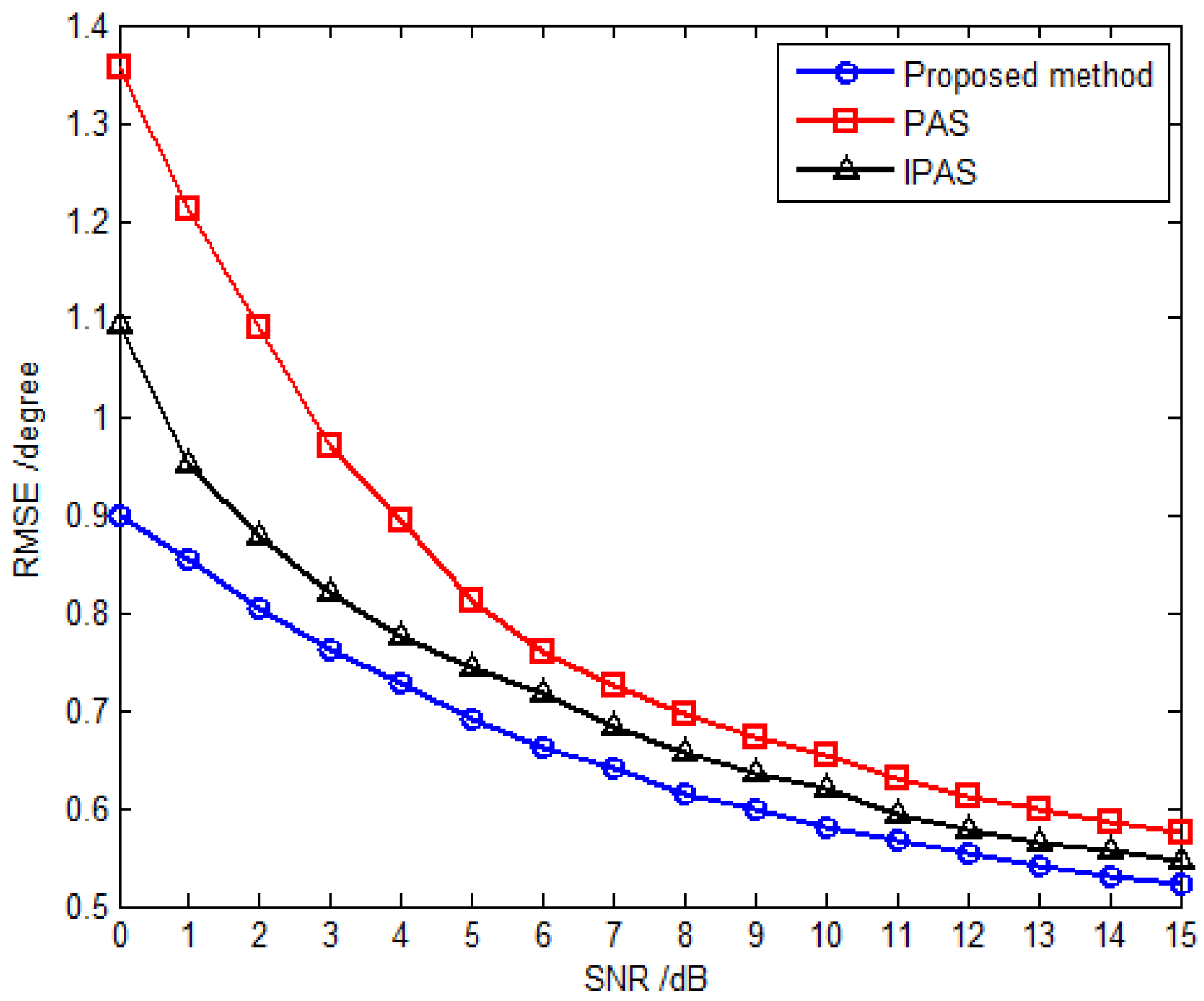
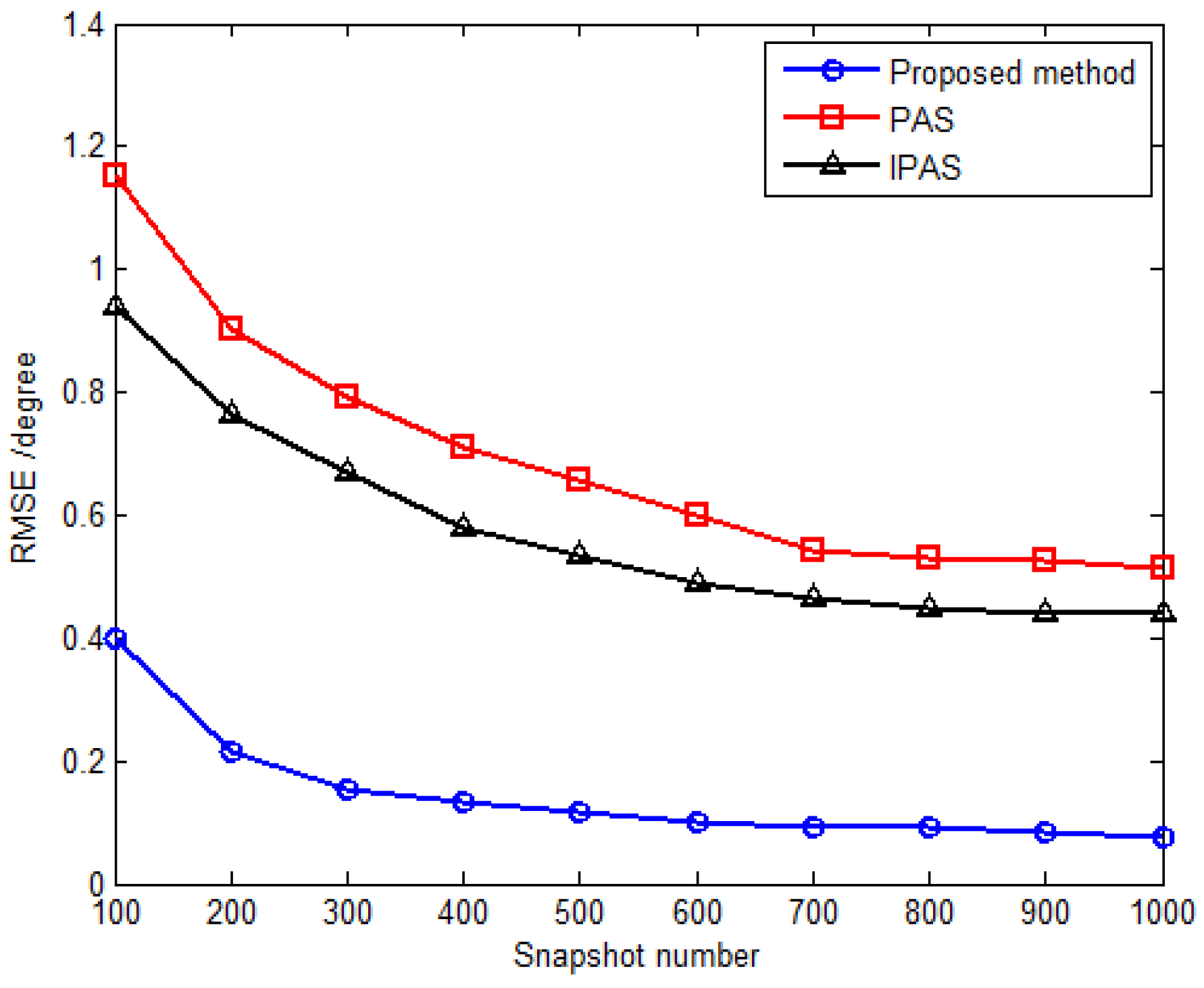
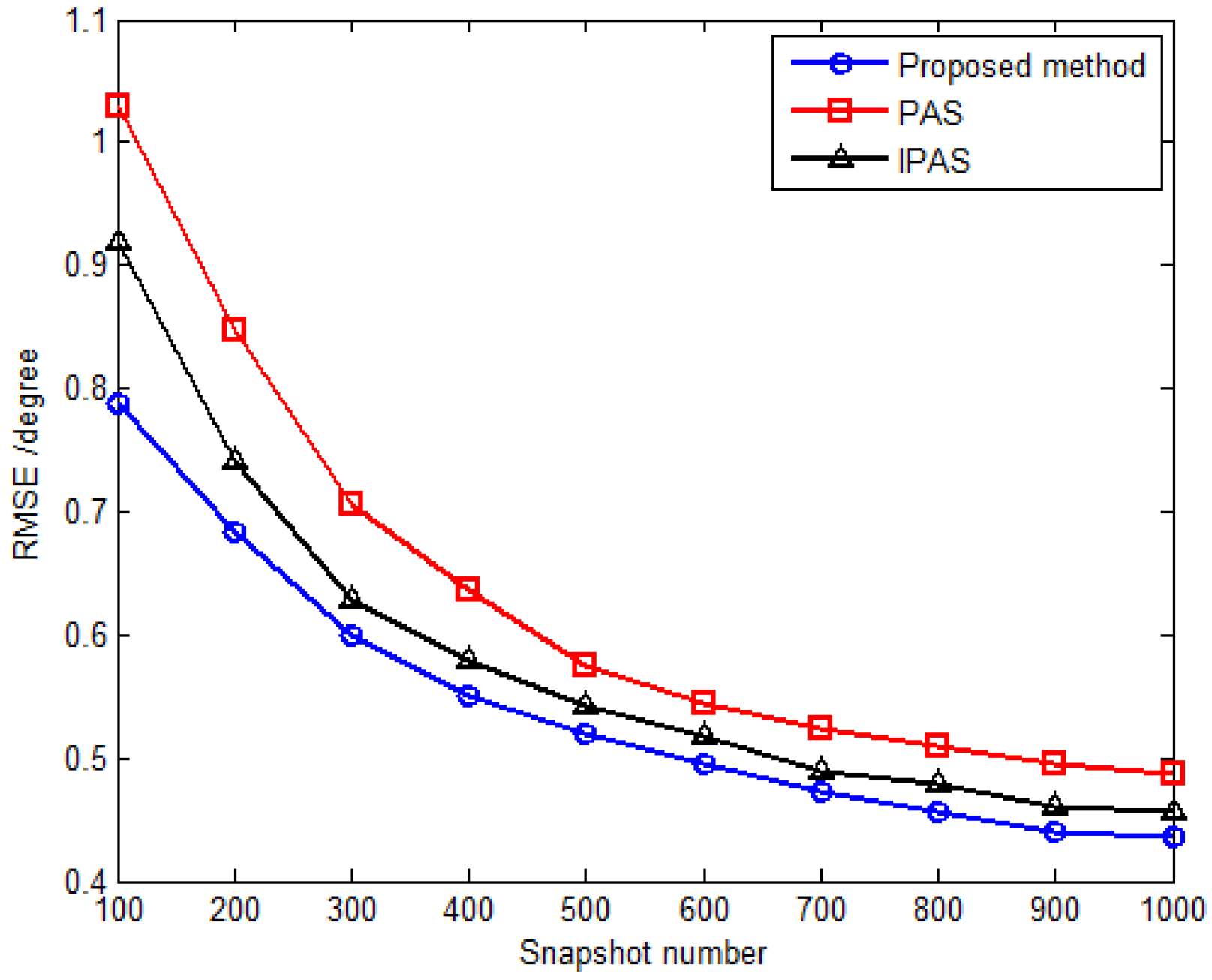
5. Simulation
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| DOA | direction of arrival |
| 2-D | two-dimensional |
| SD-VS | sparsely-distributed vector sensor |
| TEM | transverse electromagnetic |
| RMSE | the root mean squared error |
References
- Wan, L.T.; Han, G.J.; Han, G.J. PD Source Diagnosis and Localization in Industrial High-Voltage Insulation System via Multimodal Joint Sparse Representation. IEEE Trans. Ind. Electron. 2016, 63, 2506–2516. [Google Scholar] [CrossRef]
- Yuan, X. Estimating the DOA and the polarization of a polynomial-phase signal using a single polarized vector-sensor. IEEE Trans. Signal Process. 2012, 60, 1270–1282. [Google Scholar] [CrossRef]
- Nehorai, A.; Paldi, E. Vector-sensor array processing for electromagnetic source localization. IEEE Trans. Signal Process. 1994, 42, 376–398. [Google Scholar] [CrossRef]
- Paulus, C.; Mars, J.I. Vector-Sensor array processing for polarization parameters and DOA estimation. EURASIP J. Adv. Signal Process. 2010, 2010, 1–13. [Google Scholar] [CrossRef]
- Wong, K.T.; Zoltowski, M.D. Self-initiating MUSIC-based direction finding and polarization estimation in spatio-polarizational beamspace. IEEE Trans. Antennas Propag. 2000, 48, 1235–1245. [Google Scholar]
- Zoltowski, M.D.; Wong, K.T. Closed-form eigenstructure-based direction finding using arbitrary but identical subarrays on a sparse uniform Cartesian array grid. IEEE Trans. Signal Process. 2000, 48, 2205–2210. [Google Scholar] [CrossRef]
- Wong, K.T.; Li, L.; Zoltowski, M.D. Root-MUSIC-based direction-finding and polarization estimation using diversely polarized possibly collocated antennas. IEEE Antennas Wirel. Propag. Lett. 2004, 3, 129–132. [Google Scholar] [CrossRef]
- Li, J.; Compton, R.T., Jr. Angle and polarization estimation using ESPRIT with a polarization sensitive array. IEEE Trans. Antennas Propag. 1991, 39, 1376–1383. [Google Scholar] [CrossRef]
- Li, J. Direction and polarization estimation using arrays with small loops and short dipoles. IEEE Trans. Antennas Propag. 1993, 41, 379–387. [Google Scholar] [CrossRef]
- Zoltowski, M.D.; Wong, K.T. ESPRIT-based 2-D direction finding with a sparse uniform array of electromagnetic vector sensors. IEEE Trans. Signal Process. 2000, 48, 2195–2204. [Google Scholar] [CrossRef]
- Rahamim, D.; Tabrikian, J.; Shavit, R. Source localization using vector sensor array in a multipath environment. IEEE Trans. Signal Process. 2004, 52, 3096–3103. [Google Scholar] [CrossRef]
- He, J.; Jiang, S.; Wang, J. Polarization difference smoothing for direction finding of coherent signals. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 469–480. [Google Scholar] [CrossRef]
- Xu, Y.; Liu, Z. Polarimetric angular smoothing algorithm for an electromagnetic vector-sensor array. IET Radar Sonar Navig. 2007, 1, 230–240. [Google Scholar] [CrossRef]
- Diao, M.; An, C.L. Direction finding of coexisted independent and coherent signals using electromagnetic vector sensor. J. Syst. Eng. Electron. 2012, 23, 481–487. [Google Scholar] [CrossRef]
- Wang, K.; He, J.; Shu, T. Angle-Polarization Estimation for Coherent Sources with Linear Tripole Sensor Arrays. Sensors 2016, 16, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z. DOA and polarization estimation via signal reconstruction with linear polarization-sensitive arrays. Chin. J. Aeronaut. 2015, 28, 1718–1724. [Google Scholar] [CrossRef]
- Gu, C.; He, J.; Zhu, X. Efficient 2D DOA estimation of coherent signals in spatially correlated noise using electromagnetic vector sensors. Multidimens. Syst. Signal Process. 2010, 21, 239–254. [Google Scholar] [CrossRef]
- Liu, Z.; Xu, T. Source localization using a non-cocentered orthogonal loop and dipole (NCOLD) array. Chin. J. Aeronaut. 2013, 26, 1471–1476. [Google Scholar] [CrossRef]
- Wong, K.T.; Yuan, X. “Vector cross-product direction-finding” with an electromagnetic vector-sensor of six orthogonally oriented but spatially noncollocating dipoles/loops. IEEE Trans. Signal Process. 2011, 59, 160–171. [Google Scholar] [CrossRef]
- Yuan, X. Spatially spread dipole/loop quads/quints: For direction finding and polarization estimation. IEEE Antennas Wirel. Propag. Lett. 2013, 12, 1081–1084. [Google Scholar] [CrossRef]
- Zheng, G. A novel spatially spread electromagnetic vector sensor for high-accuracy 2-D DOA estimation. IEEE Trans. Signal Process. 2015, 1–26. [Google Scholar] [CrossRef]
- Tao, H.; Xin, J.; Wang, J.; Zheng, N. Two-dimensional direction estimation for a mixture of noncoherent and coherent signals. IEEE Trans. Signal Process. 2015, 63, 318–333. [Google Scholar] [CrossRef]
- Wan, L.; Han, G.; Rodrigues, J.J.P.C.; Si, W. An energy efficient DOA estimation algorithm for uncorrelated and coherent signals in virtual MIMO systems. Telecommun. Syst. 2015, 59, 93–110. [Google Scholar] [CrossRef]
- Yuan, X.; Wong, K.T.; Xu, Z. Various compositions to form a triad of collocated dipoles/loops, for direction finding and polarization esitmation. IEEE Sens. J. 2012, 12, 1763–1771. [Google Scholar] [CrossRef]
- Song, Y.; Yuan, X.; Wong, K.T. Corrections to “Vector Cross-Product Direction-Finding’ With an Electromagnetic Vector-Sensor of Six Orthogonally Oriented But Spatially Noncollocating Dipoles/Loops”. IEEE Trans. Signal Process. 2014, 62, 1028–1030. [Google Scholar] [CrossRef]
- Shan, T.J.; Paulraj, A.; Kailath, T. On smoothed rank profile tests in eigenstructure methods for directions-of-arrival estimation. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 1377–1385. [Google Scholar] [CrossRef]
- Zhang, Y.; Ye, Z.; Liu, C. Estimation of fading coefficients in the presence of multipath propagation. IEEE Trans. Antennas Propag. 2009, 57, 2220–2224. [Google Scholar] [CrossRef]
- Gan, L.; Luo, X. Direction-of-arrival estimation for uncorrelated and coherent signals in the presence of multipath propagation. IET Microw. Antennas Propag. 2013, 7, 746–753. [Google Scholar] [CrossRef]
- Yuan, X.; Wong, K.T.; Agrawal, K. Polarization estimation with a dipole-dipole pair, a dipole-loop pair, or a loop-loop pair of various orientations. IEEE Trans. Antennas Propag. 2012, 60, 2442–2452. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Composition | Estimation Formulas | Intermediate Variables |
|---|---|---|
| (a) | | |
| (b) | | |
| (c) | | |
| (d) | | |
Input:
|
Distinguish Uncorrelated Sources from Coherent Sources:
|
Parameter Estimation for Uncorrelated Sources:
|
Parameter Estimation for Coherent Sources:
|
| Methods | Covariance Matrix | EVD/SVD | Moore-Penrose | Peak Search |
|---|---|---|---|---|
| Proposed | without | |||
| PAS | without | |||
| IPAS | without |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Si, W.; Zhao, P.; Qu, Z. Two-Dimensional DOA and Polarization Estimation for a Mixture of Uncorrelated and Coherent Sources with Sparsely-Distributed Vector Sensor Array. Sensors 2016, 16, 789. https://doi.org/10.3390/s16060789
Si W, Zhao P, Qu Z. Two-Dimensional DOA and Polarization Estimation for a Mixture of Uncorrelated and Coherent Sources with Sparsely-Distributed Vector Sensor Array. Sensors. 2016; 16(6):789. https://doi.org/10.3390/s16060789
Chicago/Turabian StyleSi, Weijian, Pinjiao Zhao, and Zhiyu Qu. 2016. "Two-Dimensional DOA and Polarization Estimation for a Mixture of Uncorrelated and Coherent Sources with Sparsely-Distributed Vector Sensor Array" Sensors 16, no. 6: 789. https://doi.org/10.3390/s16060789