
Resilient Sensor Networks with Spatiotemporal Interpolation of Missing Sensors: An Example of Space Weather Forecasting by Multiple Satellites

Abstract
:1. Introduction
2. Extension of Dynamic Relational Network for Spatiotemporal Interpolation
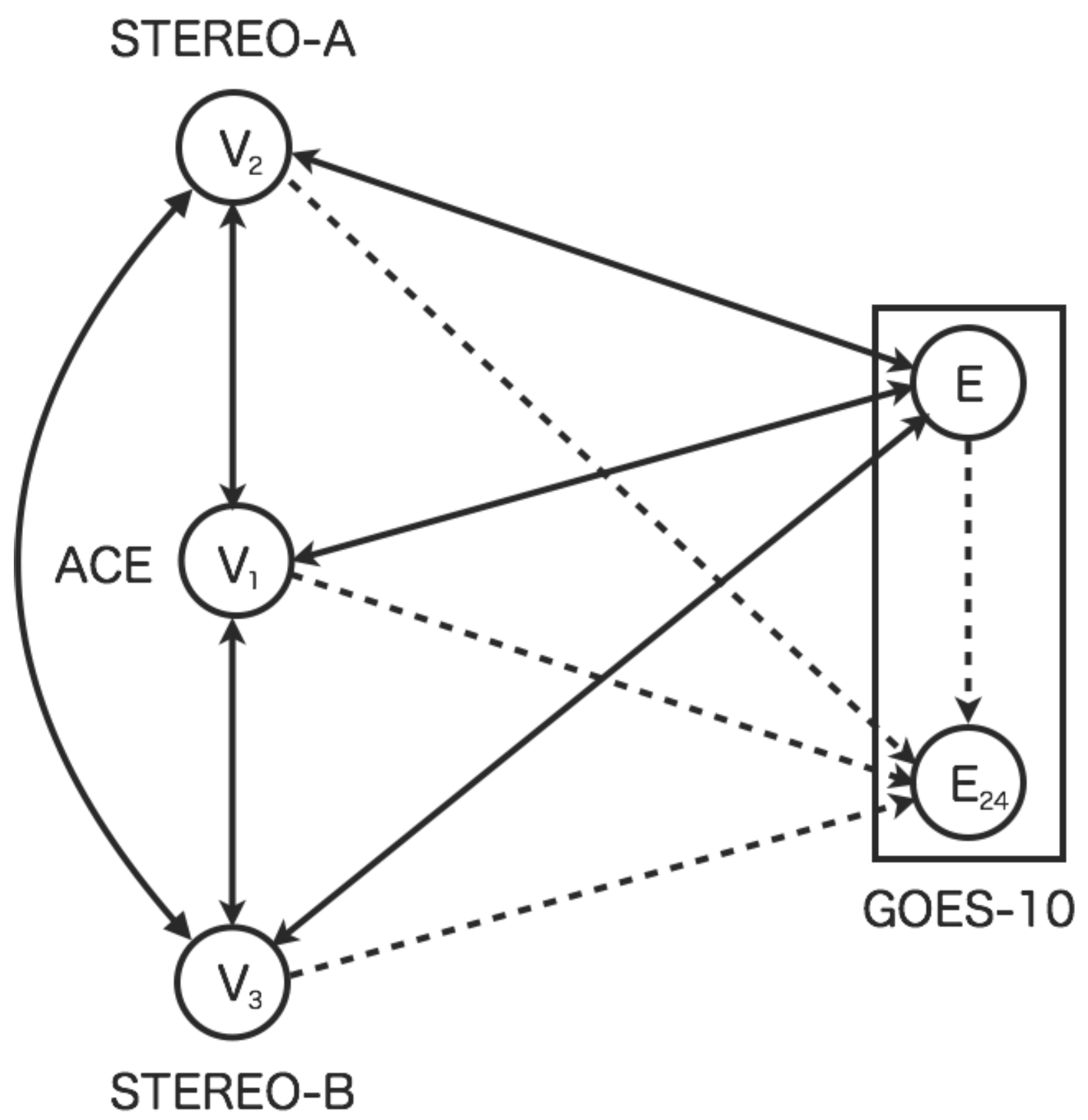
2.1. Dynamic Relational Network Model for Space Weather Forecasting
2.2. Dynamics of Dynamic Relational Network Model
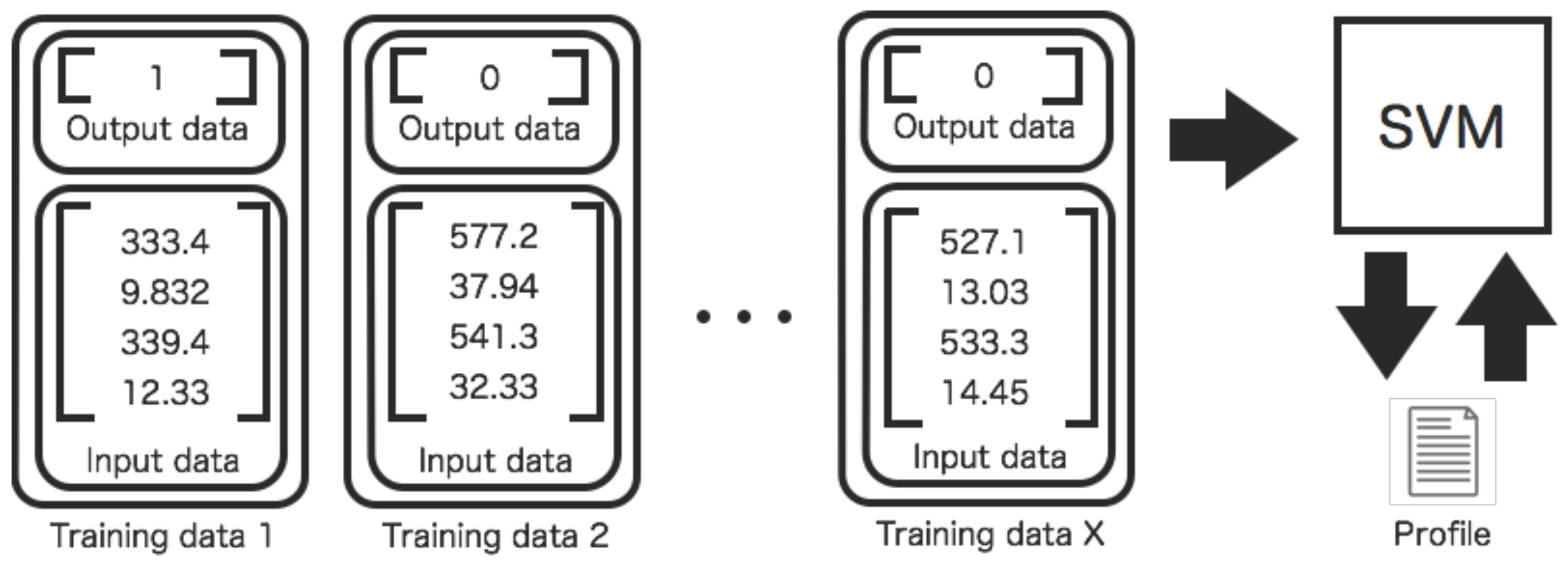
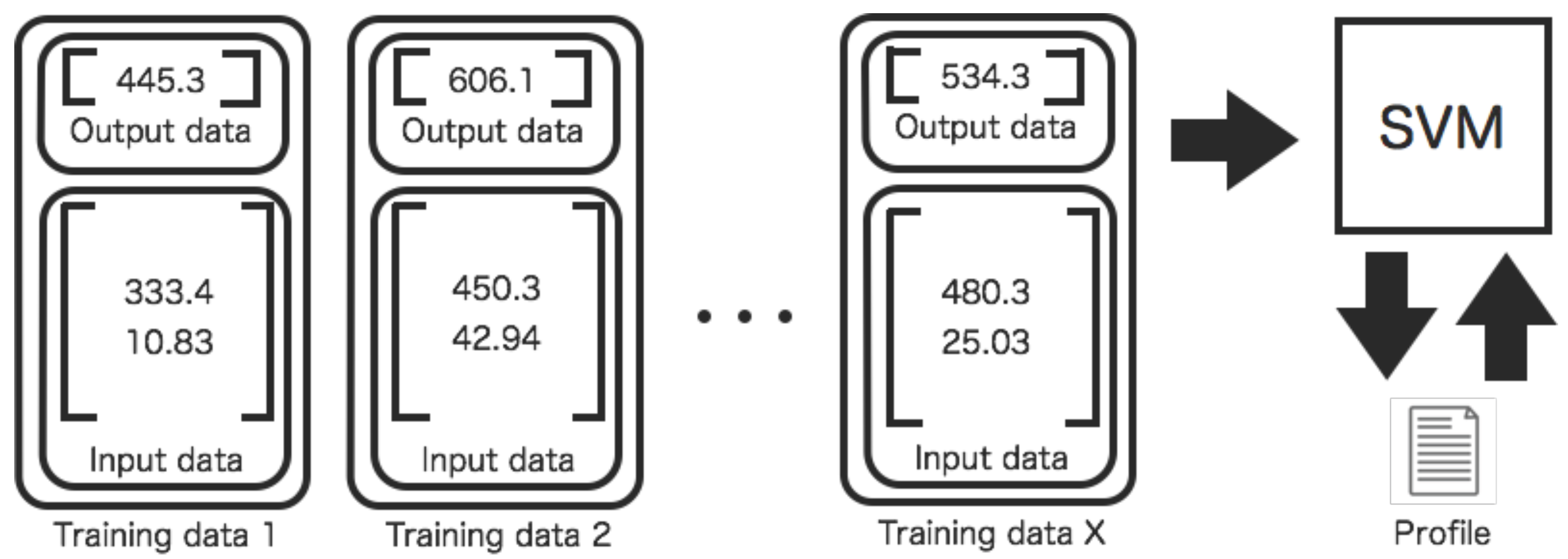
2.3. Modeling of Relations between Two Sensors
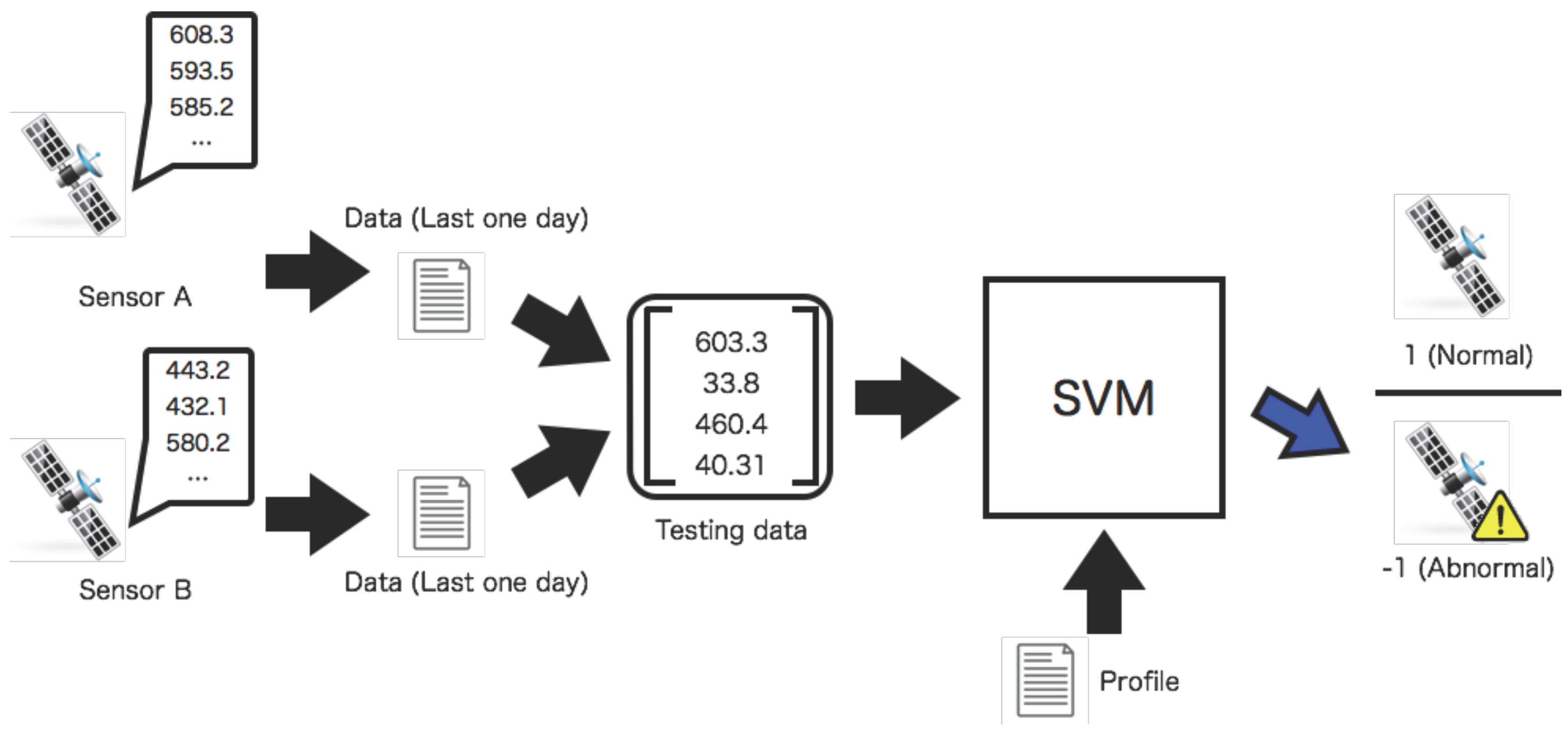
2.4. Tests of Relations in Dynamic Relational Network
3. Simulations
3.1. Data Description
3.2. Case Study 1: Fault of Single Sensor
3.3. Case Study 2: Faults of Multiple Sensors
3.4. Significance of Spatiotemporal Interpolation in Space Weather Forecasting
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Baker, D.N.; Kanekal, S.; Blake, J.B.; Klecker, B.; Rostoker, G. Satellite anomalies linked to electron increase in the magnetosphere. Eos Transa. Am. Geophys. Union 1994, 75, 401–405. [Google Scholar] [CrossRef]
- Bodeau, J.M. Recent Texts on Spacecraft Charging of Interest to the Space Weather Community. Space Weather 2013, 11, 91–93. [Google Scholar] [CrossRef]
- Tokumitsu, M.; Ishida, Y. A Space Weather Forecasting System with Multiple Satellites Based on a Self-Recognizing Network. Sensors 2014, 14, 7974–7991. [Google Scholar] [CrossRef] [PubMed]
- Ishida, Y. Designing an Immunity-Based Sensor Network for Sensor-Based Diagnosis of Automobile Engines. In Knowledge-Based Intelligent Information and Engineering Systems; Lecture Notes in Computer Science; Gabrys, B., Howlett, R., Jain, L., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; Volume 4252, pp. 146–153. [Google Scholar]
- Ishida, Y. Immunity-Based Systems: A Design Perspective; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Ishida, Y.; Tokumitsu, M. Adaptive Sensing Based on Profiles for Sensor Systems. Sensors 2009, 9, 8422–8437. [Google Scholar] [CrossRef] [PubMed]
- Henry, K.J.; Stinson, D.R. Resilient Aggregation in Simple Linear Sensor Networks. IACR Cryptol. ePrint Arch. 2014, 2014, 1–21. [Google Scholar]
- Trivedi, K.S.; Kim, D.S.; Ghosh, R. Resilience in Computer Systems and Networks. In Proceedings of the 2009 International Conference on Computer-Aided Design, San Jose, CA, USA, 2–5 November 2009; pp. 74–77.
- Ghose, A.; Grossklags, J.; Chuang, J. Resilient Data-Centric Storage in Wireless Ad-Hoc Sensor Networks. In Proceedings of the 4th International Conference on Mobile Data Management, Melbourne, Australia, 21–24 Jaunary 2003; pp. 45–62.
- Sterbenz, J.P.G.; Hutchison, D.; Çetinkaya, E.K.; Jabbar, A.; Rohrer, J.P.; Schöller, M.; Smith, P. Resilience and Survivability in Communication Networks: Strategies, Principles, and Survey of Disciplines. Comput. Netw. 2010, 54, 1245–1265. [Google Scholar] [CrossRef]
- Benson, K.E.; Venkatasubramanian, N. Improving sensor data delivery during disaster scenarios with resilient overlay networks. In Proceedings of the 2013 IEEE International Conference on Pervasive Computing and Communications Workshops, PERCOM 2013 Workshops, San Diego, CA, USA, 18–22 March 2013; pp. 547–552.
- Tokumitsu, M.; Hasegawa, K.; Ishida, Y. Toward Resilient Sensor Networks with Spatiotemporal Interpolation of Missing Data: An Example of Space Weather Forecasting. In Proceedings of the Knowledge-Based and Intelligent Information & Engineering Systems 19th Annual Conference, Singapore, 7–9 September 2015; pp. 1585–1594.
- Mavromichalaki, H.; Papaioannou, A.; Mariatos, G.; Papailiou, M.; Belov, A.; Eroshenko, E.; Yanke, V.; Stassinopoulos, E. Cosmic Ray Radiation Effects on Space Environment Associated to Intense Solar and Geomagnetic Activity. IEEE Trans. Nuclear Sci. 2007, 54, 1089–1096. [Google Scholar] [CrossRef]
- Burges, C.J.C. A Tutorial on Support Vector Machines for Pattern Recognition. Data Min. Knowl. Discov. 1998, 2, 121–167. [Google Scholar] [CrossRef]
- Liemohn, M.W.; Chan, A.A. Unraveling the causes of radiation belt enhancements. Eos Trans. Am. Geophys. Union 2007, 88, 425–426. [Google Scholar] [CrossRef]
- Elkington, S.R.; Hudson, M.K.; Chan, A.A. Acceleration of relativistic electrons via drift-resonant interaction with toroidal-mode Pc-5 ULF oscillations. Geophys. Res. Lett. 1999, 26, 3273–3276. [Google Scholar] [CrossRef]
- Furuya, N.; Omura, Y.; Summers, D. Relativistic turning acceleration of radiation belt electrons by whistler mode chorus. J. Geophys. Res. Space Phys. 2008, 113. [Google Scholar] [CrossRef]
- ERG Science Center. ERG Science Center. Available online: http://ergsc.stelab.nagoya-u.ac.jp/ (accessed on 29 December 2015).
- Katoh, Y.; Omura, Y. Relativistic particle acceleration in the process of whistler-mode chorus wave generation. Geophys. Res. Lett. 2007, 34. [Google Scholar] [CrossRef]
- Katoh, Y.; Omura, Y. Computer simulation of chorus wave generation in the Earth’s inner magnetosphere. Geophys. Res. Lett. 2007, 34. [Google Scholar] [CrossRef]
- Baker, D.N.; McPherron, R.L.; Cayton, T.E.; Klebesadel, R.W. Linear prediction filter analysis of relativistic electron properties at 6.6 RE. J. Geophys. Res. Space Phys. 1990, 95, 15133–15140. [Google Scholar] [CrossRef]
- Koons, H.C.; Gorney, D.J. A neural network model of the relativistic electron flux at geosynchronous orbit. J. Geophys. Res. Space Phys. 1991, 96, 5549–5556. [Google Scholar] [CrossRef]
- Watari, S.; Tokumitsu, M.; Kitamura, K.; Ishida, Y. Forecast of High-energy Electron Flux at Geostationary Orbit Using Neural Network. Trans. Jpn. Soc. Aeronaut. Space Sci. Space Technol. Jpn. 2009, 7, Tr 2_47–Tr 2_51. [Google Scholar] [CrossRef]
- Fukata, M.; Taguchi, S.; Okuzawa, T.; Obara, T. Neural network prediction of relativistic electrons at geosynchronous orbit during the storm recovery phase: Effects of recurring substorms. Ann. Geophys. 2002, 20, 947–951. [Google Scholar] [CrossRef]
- Kitamura, K.; Nakamura, Y.; Tokumitsu, M.; Ishida, Y.; Watari, S. Prediction of the electron flux environment in geosynchronous orbit using a neural network technique. Artif. Life Robot. 2011, 16, 389–392. [Google Scholar] [CrossRef]
- Kaiser, M.L.; Kucera, T.A.; Davila, J.M.; Cyr, O.C.; Guhathakurta, M.; Christian, E. The STEREO Mission. In The STEREO Mission; Chapter The STEREO Mission: An Introduction; Springer New York: New York, NY, USA, 2008; pp. 5–16. [Google Scholar]
- Stone, E.; Frandsen, A.; Mewaldt, R.; Christian, E.; Margolies, D.; Ormes, J.; Snow, F. The Advanced Composition Explorer. Space Sci. Rev. 1998, 86, 1–22. [Google Scholar] [CrossRef]
- Space Physics Interactive Data Resource (SPIDR); National Geophysical Data Center (NGDC). Space Physics Interactive Data Resource (SPIDR). Available online: http://spidr.ngdc.noaa.gov/spidr/ (accessed on 29 December 2015).
- The National Space Science Data Center (NSSDC) of the National Aeronautics and Space Administration/Goddard Space Flight Center. Coordinated Data Analysis Web (CDAWeb). Available online: http://cdaweb.gsfc.nasa.gov/ (accessed on 29 December 2015).
- King, J.H.; Papitashvili, N.E. Solar wind spatial scales in and comparisons of hourly Wind and ACE plasma and magnetic field data. J. Geophys. Res. Space Phys. 2005, 110. [Google Scholar] [CrossRef]
- Space Weather Prediction Center and National Oceanic and Atmospheric Administration. Space Weather Alerts Description and Criteria. Available online: http://www.swpc.noaa.gov/alerts/description.html#electron (accessed on 29 December 2015).
- The ZigBee Alliance. The ZigBee Alliance|Control your world. Available online: http://www.zigbee.org/ (accessed on 29 December 2015).
- Harrington, D.; Presuhn, R.; Wijnen, B. An Architecture for Describing Simple Network Management Protocol (SNMP) Management Frameworks. RFC 3411 (Standard); Updated by RFCs 5343, 5590, Internet Engineering Task Force. 2002. Available online: http://www.ietf.org/rfc/rfc3411.txt (accessed on 10 April 2016).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (a) | |||||
| Interpolation (Used) | 0.795 | 0.803 | 0.884 | 0.981 | 0.8501 |
| Interpolaton (Unused) | 0.793 | 0.022 | 0.821 | 0.826 | 0.8081 |
| (b) | |||||
| Interpolation (Used) | 0.739 | 0.631 | 0.627 | 0.775 | 0.8181 |
| Interpolation (Unused) | 0.630 | 0.048 | 0.048 | 0.637 | 0.7691 |
| Single Sensor Failed | Two Sensors Failed | |
|---|---|---|
| Interpolation (Used) | 0.849 | 0.833 |
| Interpolation (Unused) | 0.850 | 0.834 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tokumitsu, M.; Hasegawa, K.; Ishida, Y. Resilient Sensor Networks with Spatiotemporal Interpolation of Missing Sensors: An Example of Space Weather Forecasting by Multiple Satellites. Sensors 2016, 16, 548. https://doi.org/10.3390/s16040548
Tokumitsu M, Hasegawa K, Ishida Y. Resilient Sensor Networks with Spatiotemporal Interpolation of Missing Sensors: An Example of Space Weather Forecasting by Multiple Satellites. Sensors. 2016; 16(4):548. https://doi.org/10.3390/s16040548
Chicago/Turabian StyleTokumitsu, Masahiro, Keisuke Hasegawa, and Yoshiteru Ishida. 2016. "Resilient Sensor Networks with Spatiotemporal Interpolation of Missing Sensors: An Example of Space Weather Forecasting by Multiple Satellites" Sensors 16, no. 4: 548. https://doi.org/10.3390/s16040548