Preliminary Analysis of Chinese GF-3 SAR Quad-Polarization Measurements to Extract Winds in Each Polarization

 , ,
, ,  , and
, and
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Methods
3. Results
3.1. Noise Equivalent Sigma Zero
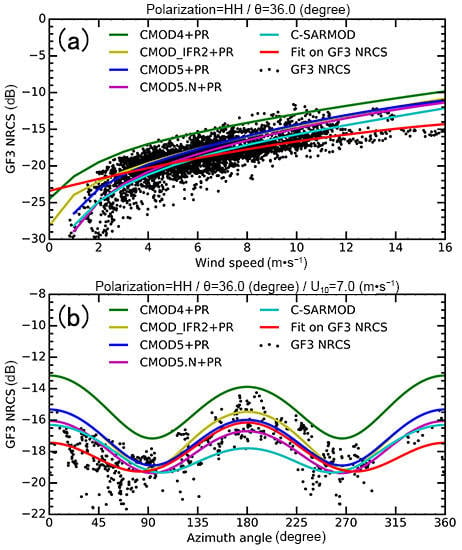
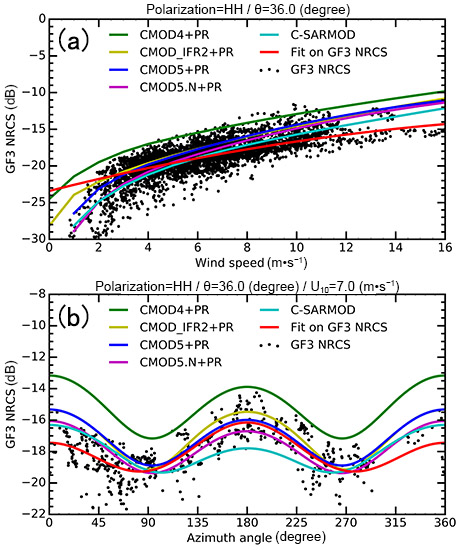
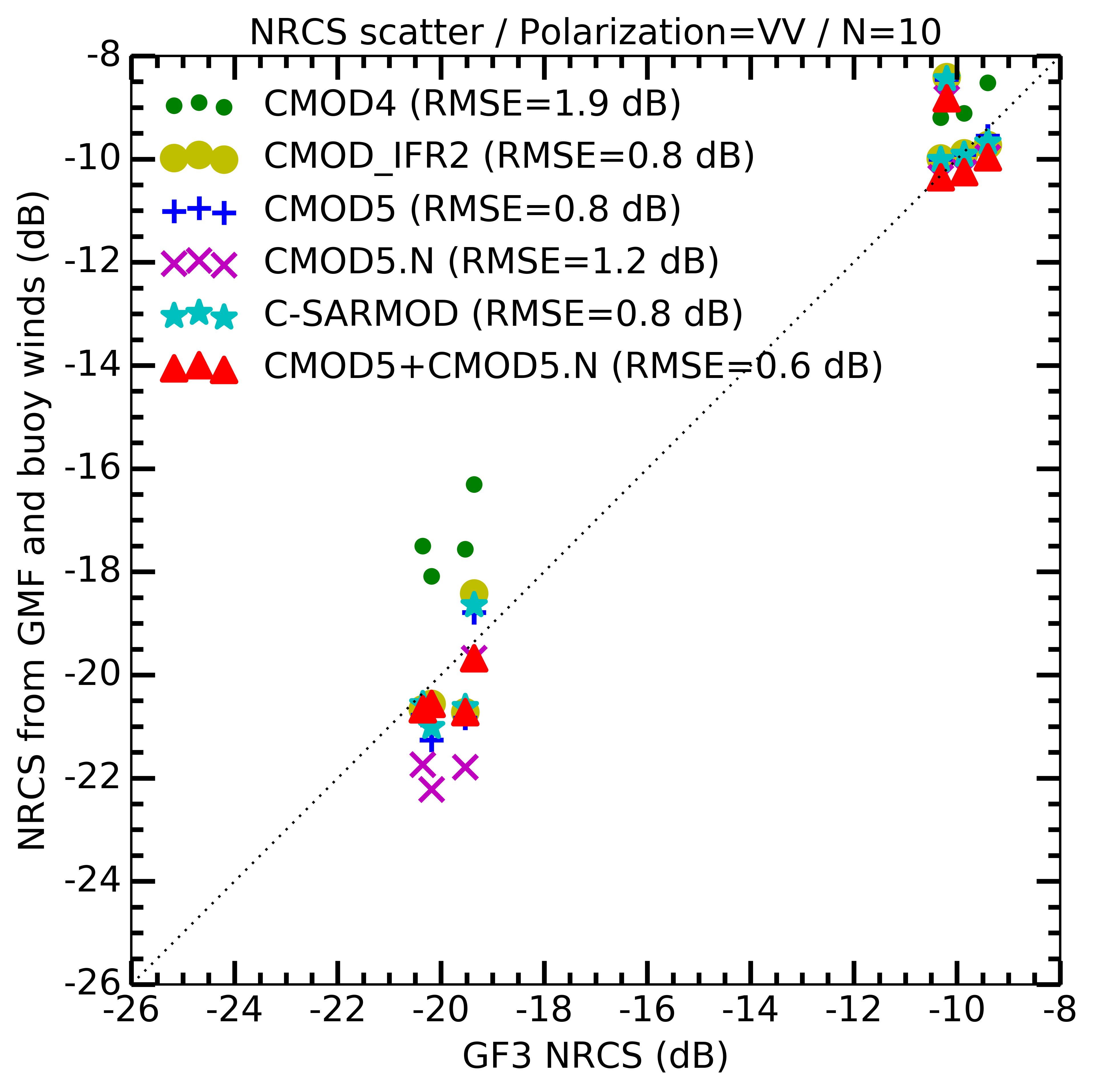
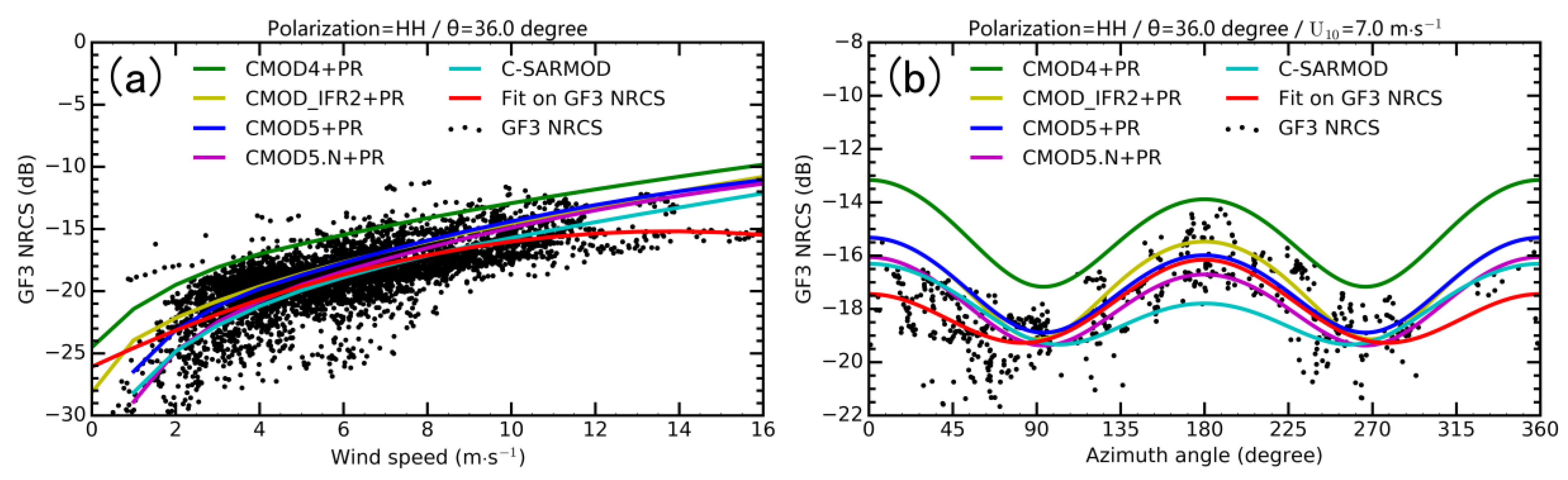
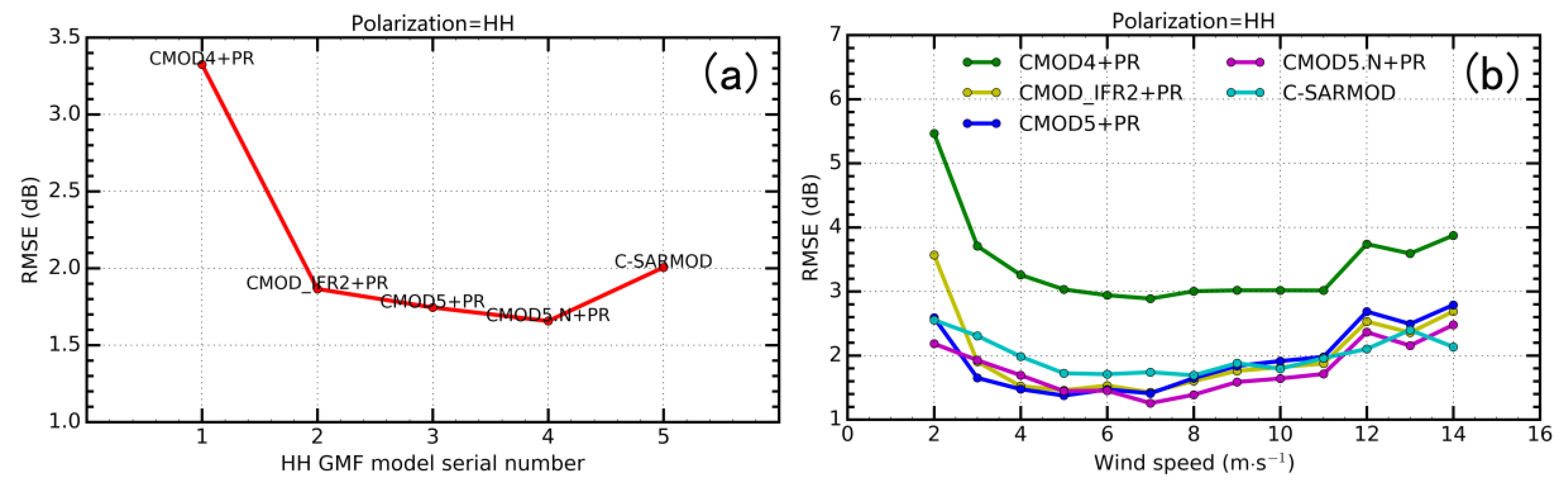
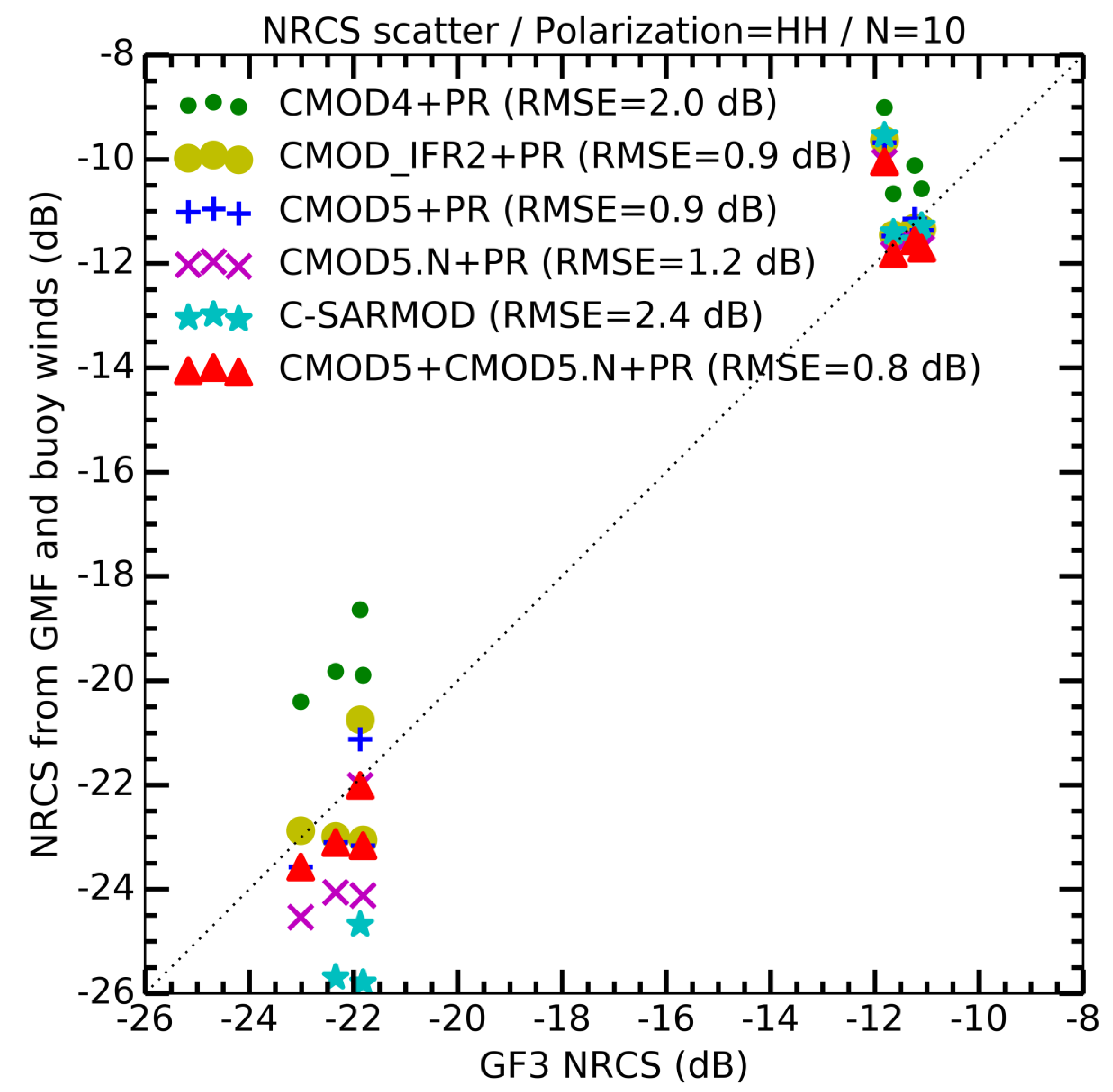
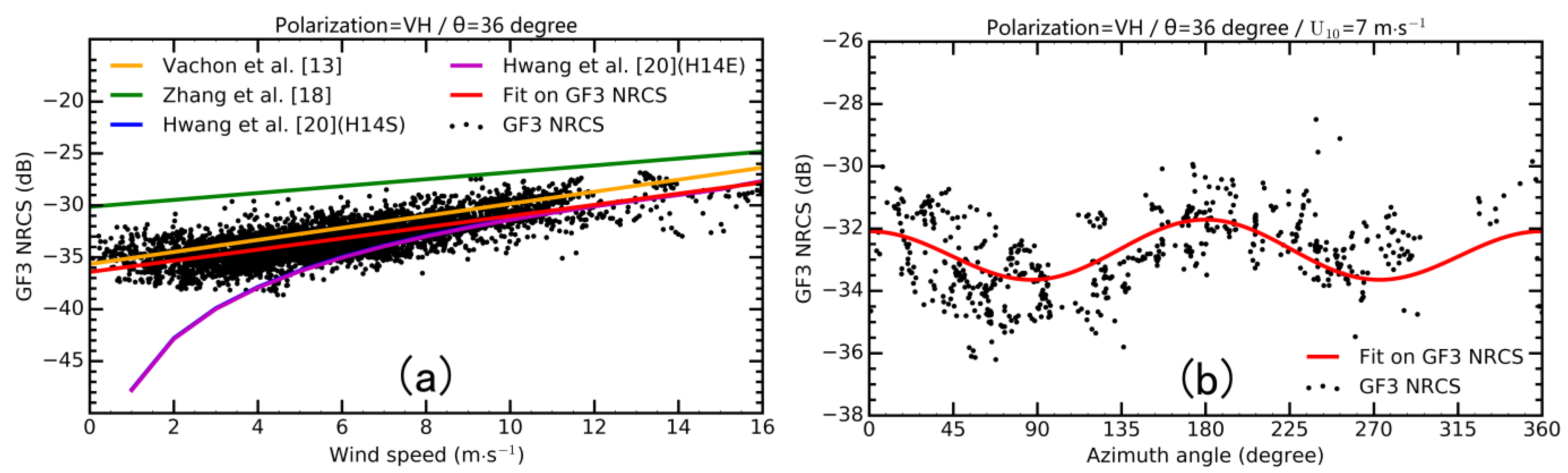
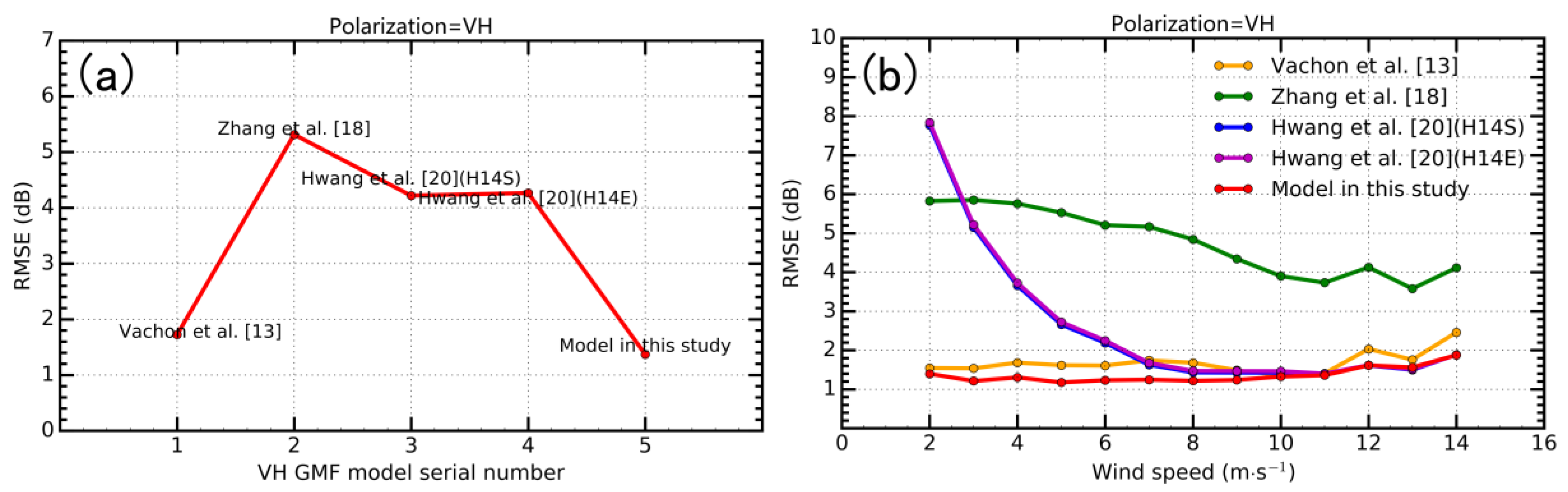
3.2. Wind Sensitivity for NRCS
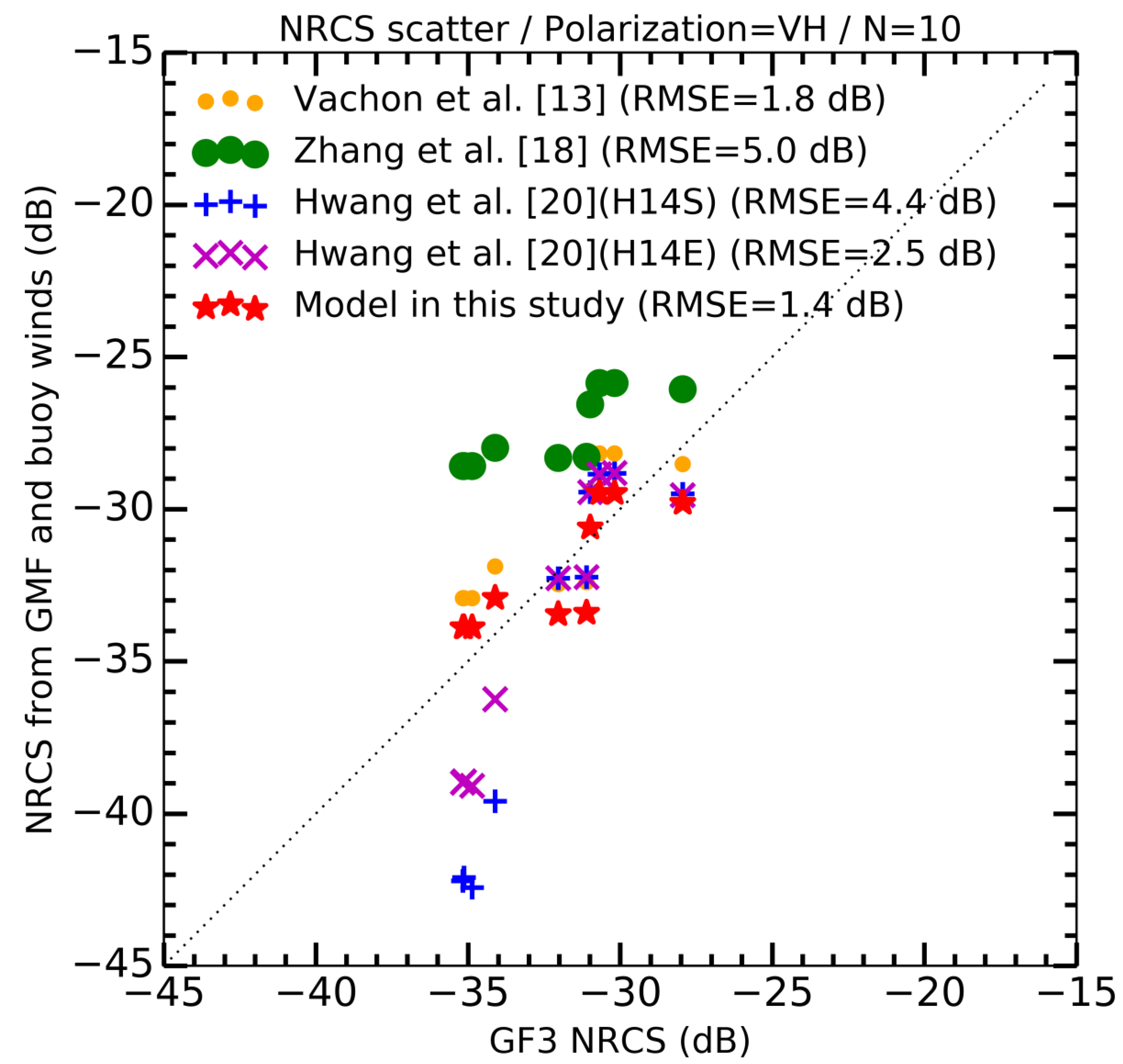
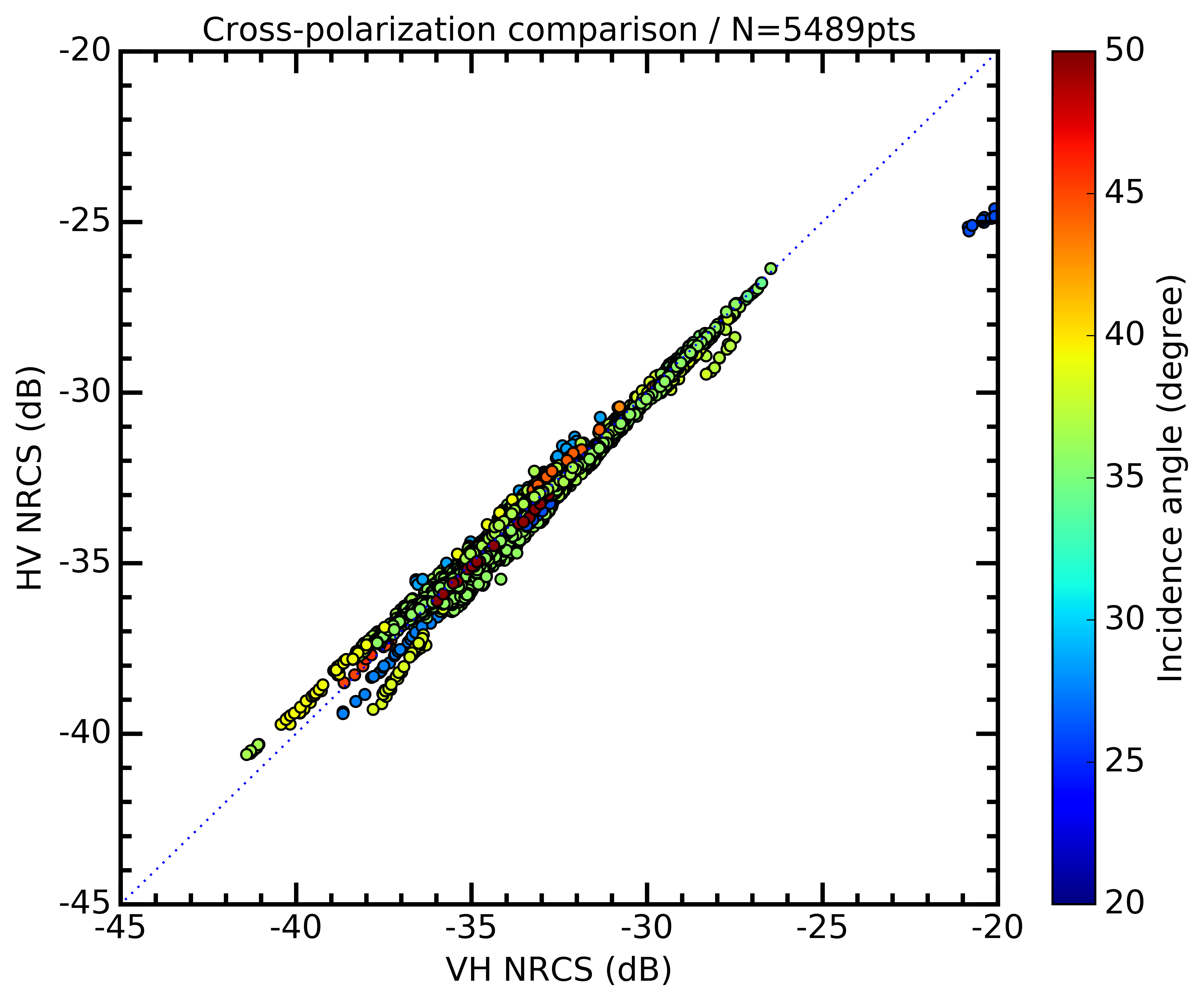
3.3. Wind Sensitivity for the Polarization Combination
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Valenzuela, G.R. Theories for the interaction of electromagnetic and oceanic waves—A review. Bound. Layer Meteorol. 1978, 13, 61–85. [Google Scholar] [CrossRef]
- Stoffelen, A.; Anderson, D. Scatterometer data interpretation: Derivation of the transfer function CMOD4. J. Geophys. Res. 1997, 102, 5767–5780. [Google Scholar] [CrossRef]
- Quilfen, Y.; Chapron, B.; Elfouhaily, T.; Katsaros, K.; Tournadre, J. Observation of tropical cyclones by high-resolution scatterometry. J. Geophys. Res. 1998, 103, 7767–7786. [Google Scholar] [CrossRef]
- Hersbach, H.; Stoffelen, A.; Haan, S. An improved C-band scatterometer ocean geophysical model function: CMOD5. J. Geophys. Res. 2007, 112, C03006. [Google Scholar] [CrossRef]
- Hersbach, H. CMOD5.N: A C-Band Geophysical Model Function for Equivalent Neural Wind; ECMWF: Reading, UK, 2008; p. 554. [Google Scholar]
- Elfouhaily, T. Physical Modeling of Electromagnetic Backscatter from the Ocean Surface, Application to Retrieval of Wind Fields and Wind Stress by Remote Sensing of the Marine Atmospheric Boundary Layer. Ph.D. Thesis, University Paris VII, Paris, France, 1996. [Google Scholar]
- Thompson, D.R.; Elfouhaily, T.M.; Chapron, B. Polarization ratio for microwave backscattering from the ocean surface at low to moderate incidence angles. In Proceedings of the 1998 IEEE International Geoscience and Remote Sensing Symposium Proceedings (IGARSS ’98), Seattle, WA, USA, 6–10 July 1998; pp. 1671–1673. [Google Scholar] [CrossRef]
- Vachon, P.W.; Dobson, F. Wind retrieval from RADARSAT SAR images: Selection of a suitable C-band HH polarization wind retrieval model. Can. J. Remote Sens. 2000, 26, 306–313. [Google Scholar] [CrossRef]
- Horstmann, J.; Koch, W.; Lehner, S.; Tonboe, R. Wind retrieval over the ocean using synthetic aperture radar with C-band HH polarization. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2122–2131. [Google Scholar] [CrossRef]
- Mouche, A.; Hauser, D.; Daloze, J.-F.; Guerin, C. Dual-polarization measurements at C-band over the ocean: Results from airborne radar observations and comparison with ENVISAT ASAR data. IEEE Trans. Geosci. Remote Sens. 2005, 43, 753–769. [Google Scholar] [CrossRef]
- Zhang, B.; Perrie, W.; He, Y. Wind speed retrieval from RADARSAT2 quad-polarization images using a new polarization ratio model. J. Geophys. Res. 2011, 116, C08008. [Google Scholar] [CrossRef]
- Mouche, A.; Chapron, B. Global C-Band Envisat, RADARSAT-2 and Sentinel-1 SAR measurements in copolarization and cross-polarization. J. Geophys. Res. Oceans 2015, 120, 7195–7207. [Google Scholar] [CrossRef]
- Vachon, P.W.; Wolfe, J. C-band cross-polarization wind speed retrieval. IEEE Trans. Geosci. Remote Sens. Lett. 2011, 8, 456–458. [Google Scholar] [CrossRef]
- Zhang, B.; Perrie, W. Cross-polarized synthetic aperture radar: A new potential technique for hurricanes. Bull. Am. Meteorol. Soc. 2011, 93, 531–541. [Google Scholar] [CrossRef]
- Hwang, P.A.; Zhang, B.; Perrie, W. Depolarized radar return for breaking wave measurement and hurricane wind retrieval. Geophys. Res. Lett. 2010, 37. [Google Scholar] [CrossRef]
- Hwang, P.A.; Zhang, B.; Toporkov, J.V.; Perrie, W. Comparison of composite Bragg theory and quad-polarization radar backscatter from RADARSAT2: With applications to wave breaking and high wind retrieval. J. Geophys. Res. 2010, 115. [Google Scholar] [CrossRef]
- Hwang, P.A.; Perrie, W.; Zhang, B. Cross-polarization radar backscattering from the ocean surface and its dependence on wind velocity. IEEE Trans. Geosci. Remote Sens. Lett. 2014, 11, 2188–2192. [Google Scholar] [CrossRef]
- Zhang, B.; Perrie, W.; Zhang, J.A.; Uhlhorn, E.W.; He, Y. High-resolution hurricane vector winds from C-band dual-polarization SAR observations. J. Atmos. Ocean. Technol. 2014, 31, 272–286. [Google Scholar] [CrossRef]
- Shen, H.; Perrie, W.; He, Y.; Liu, G. Wind speed retrieval from VH dual-polarization RADARSAT-2 SAR images. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5820–5826. [Google Scholar] [CrossRef]
- Hwang, P.A.; Stoffelen, A.; Van Zadelhoff, G.-J.; Perrie, W.; Zhang, B.; Li, H.; Shen, H. Cross-polarization geophysical model function for C-band radar backscattering from the ocean surface and wind speed retrieval. J. Geophys. Res. Oceans 2015, 120, 893–909. [Google Scholar] [CrossRef]
- Sun, J.L.; Yu, W.D.; Deng, Y.K. The SAR payload design and performance for the GF-3 mission. Sensors 2017, 17, 2419. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Yang, J.S.; Mouche, A.; Shao, W.Z.; Zhu, J.H.; Ren, L.; Xie, C.H. GF-3 SAR ocean wind retrieval: The first view and preliminary assessment. Remote Sens. Lett. 2017, 9, 694. [Google Scholar] [CrossRef]
- Shao, W.Z.; Sheng, Y.X.; Sun, J. Preliminary assessment of wind and wave retrieval from Chinese Gaofen-3 SAR imagery. Sensors 2017, 17, 1705. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.S.; Ren, L.; Wang, J. The first quantitative remote sensing of ocean surface waves by Chinese GF-3 SAR satellite. Acta Oceanol. Sin. 2017, 48, 207–209. [Google Scholar] [CrossRef]
- Charnock, H. Wind stress on a water surface. Q. J. R. Meteorol. Soc. 1955, 81, 639–640. [Google Scholar] [CrossRef]
- Smith, S.D. Coefficients for sea surface wind stress, heat flux, and wind profiles as a function of wind speed and temperature. J. Geophys. Res. 1988, 93, 15467–15472. [Google Scholar] [CrossRef]
- Kudryavtsev, V.N.; Chapron, B.; Myasoedov, A.G.; Collard, F.; Johannessen, J.A. On dual co-polarized SAR measurements of the ocean surface. IEEE Trans. Geosci. Remote Sens. Lett. 2013, 10, 761–765. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | Polarization | Resolution (m) | Swath (km) |
|---|---|---|---|
| QPSI | VV + HH + VH + HV | 8 | 30 |
| QPSII | VV + HH + VH + HV | 25 | 40 |
| Number | Mode | SAR Time (UTC) | SAR Cell Center Latitude (°/N) | SAR Cell Center Longitude (°/E) | Buoy Name | Buoy Latitude (°/N) | Buoy Longitude (°/E) | Buoy Wind Speed (m·s−1) | Buoy Wind Direction (°/North) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | QPSII | 2017-04-23 01:54:58 | 33.678 | −120.183 | 46069 | 33.67 | −120.20 | 10.8 | 314.0 |
| 2 | QPSII | 2017-03-08 14:08:04 | 37.384 | −122.880 | 46012 | 37.36 | −122.88 | 4.7 | 331.0 |
| 3 | QPSII | 2017-03-08 14:08:10 | 37.356 | −122.849 | 46012 | 37.36 | −122.88 | 4.7 | 331.0 |
| 4 | QPSII | 2017-04-06 14:08:10 | 37.782 | −122.788 | 46026 | 37.76 | −122.84 | 6.5 | 161.0 |
| 5 | QPSII | 2017-04-06 14:08:16 | 37.355 | −122.806 | 46012 | 37.36 | −122.88 | 4.7 | 155.0 |
| 6 | QPSII | 2017-04-08 14:25:17 | 37.754 | −122.821 | 46026 | 37.76 | −122.84 | 5.6 | 254.0 |
| 7 | QPSII | 2017-04-08 14:25:17 | 37.347 | −122.860 | 46012 | 37.36 | −122.88 | 5.5 | 269.0 |
| 8 | QPSII | 2017-04-23 14:05:40 | 34.249 | −120.391 | 46054 | 34.27 | −120.46 | 12.3 | 327.0 |
| 9 | QPSII | 2017-04-23 14:05:46 | 33.692 | −120.156 | 46069 | 33.67 | −120.20 | 12.9 | 304.0 |
| 10 | QPSII | 2017-04-23 14:05:52 | 33.671 | −120.192 | 46069 | 33.67 | −120.20 | 12.9 | 304.0 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, L.; Yang, J.; Mouche, A.; Wang, H.; Wang, J.; Zheng, G.; Zhang, H. Preliminary Analysis of Chinese GF-3 SAR Quad-Polarization Measurements to Extract Winds in Each Polarization. Remote Sens. 2017, 9, 1215. https://doi.org/10.3390/rs9121215
Ren L, Yang J, Mouche A, Wang H, Wang J, Zheng G, Zhang H. Preliminary Analysis of Chinese GF-3 SAR Quad-Polarization Measurements to Extract Winds in Each Polarization. Remote Sensing. 2017; 9(12):1215. https://doi.org/10.3390/rs9121215
Chicago/Turabian StyleRen, Lin, Jingsong Yang, Alexis Mouche, He Wang, Juan Wang, Gang Zheng, and Huaguo Zhang. 2017. "Preliminary Analysis of Chinese GF-3 SAR Quad-Polarization Measurements to Extract Winds in Each Polarization" Remote Sensing 9, no. 12: 1215. https://doi.org/10.3390/rs9121215