
Spatial Prediction of Coastal Bathymetry Based on Multispectral Satellite Imagery and Multibeam Data


Abstract
:
1. Introduction
- Evaluate the overall suitability of RapidEye satellite data for deriving coastal bathymetry in a representative C-shaped bay environment, through application of a blue/green band ratio and statistical models using ground calibration points.
- Determine the most suitable prediction model for the data analysed using a non-spatial, multivariate model versus four spatial alternatives, each catering for a variety of spatial effects.
- Demonstrate the value in comparing a range of predictors, carefully chosen via a suitable exploratory analysis.
- Discuss the spatial patterns of the best model’s predictions in relation to the bay’s physical characteristics.
2. Study Area and Datasets
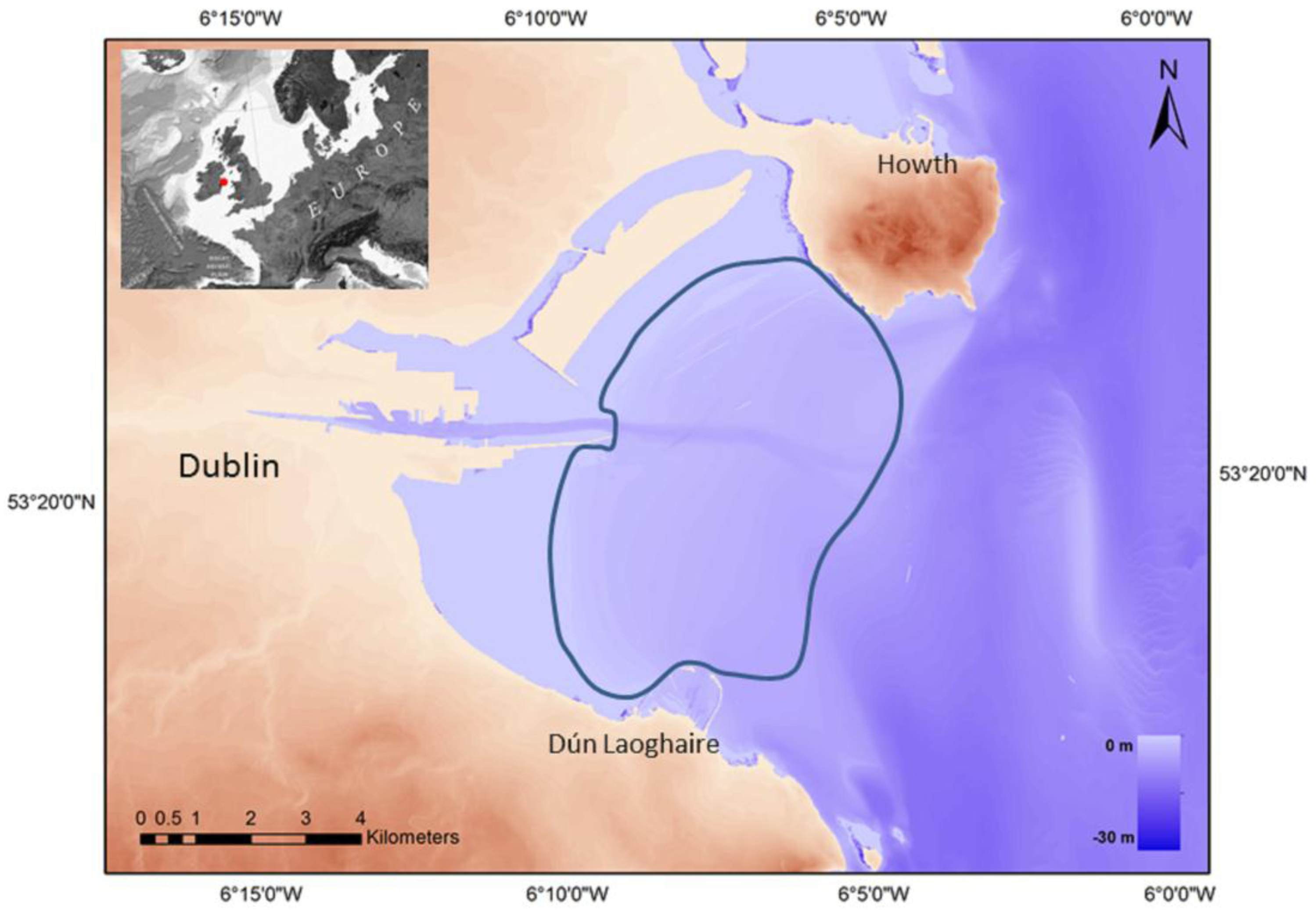
2.1. Study Area

2.2. Multibeam Bathymetry Data
2.3. Satellite Imagery

2.3.1. Spatial Resolution
2.3.2. Spectral Resolution
2.3.3. Time of Imagery
2.4. Seabed Classification Data

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Name | Description | Topography | MBES Backscatter |
|---|---|---|---|---|
| 1 | Hardground | Rock outcrops and mixed gravelly sediments | Rough | High |
| 2 | Channel | Topographically controlled class with mixed fine-grained sediments | Rough | High |
| 3 | Fine sediments I | Featureless fine sediments | Smooth | Moderate |
| 4 | Fine sediments II | Featureless fine sediments | Smooth | Low |
| 5 | Fine sediments III | Fine sediments with bedforms and possible tidal control | Smooth | Very Low |
3. Methodology
3.1. Satellite Image Processing
3.1.1. Radiometric and Geometric Corrections
3.1.2. Atmospheric Corrections
3.1.3. Contribution of Sun-Glint as an Error Source
- (a)
- A visual inspection of the image—the RGB image of the test site was inspected to identify the presence of sun-glint. None were apparent. However the spatial resolution could potentially have masked the effect.
- (b)
- In theory, energy in the NIR portion of the spectrum should be absorbed in water, and therefore any NIR that is recorded over water is due to sun-glint. In reality, there is always a small portion of NIR recorded by the sensor and it rarely equates to a DN of 0 [49]. The NIR values for the test site were inspected looking for significant variation which would imply areas of sun-glint. None were identified.
- (c)
- A final dual-wavelength test was designed to ensure no sun-glint was present in the area. A process developed by Hedley et al., [50] demonstrates a method for removing sun-glint and this was adapted and used to assess whether sun-glint was a significant contributory factor. An area of deep water, where the spectral brightness could be considered as homogenous, was located. The values for the Blue band in the visible portion of the spectrum and the NIR were then plotted against each other and a linear regression line was applied to the data. Here a very low correlation of 0.08 between NIR and Blue band values implied that minimal sun-glint is present, as the NIR values do not increases as the Blue band values increase. The slope of the linear regression line is used by Hedley et al., [50] to apply a de-glinting correction to the pixels. However, our results and the clear shallow slope of the linear regression line from the test area demonstrate that this is not necessary.
3.1.4. Log Ratio Algorithm for Satellite Derived Relative Depth
3.2. Data Integration
3.3. Prediction Models
| Model | Are Spatial Effects Modelled? | How are Spatial Relationships Modelled? | Is Spatial Autocorrelation Accounted for? |
|---|---|---|---|
| MLR | No | Stationary | No |
| KED-GN | Yes | Stationary | Yes |
| GWR | Yes | Non-stationary | No |
| GWRK | Yes | Non-stationary | Yes |
| KED-LN | Yes | Non-stationary | Yes |
3.4. Model Validation
4. Results
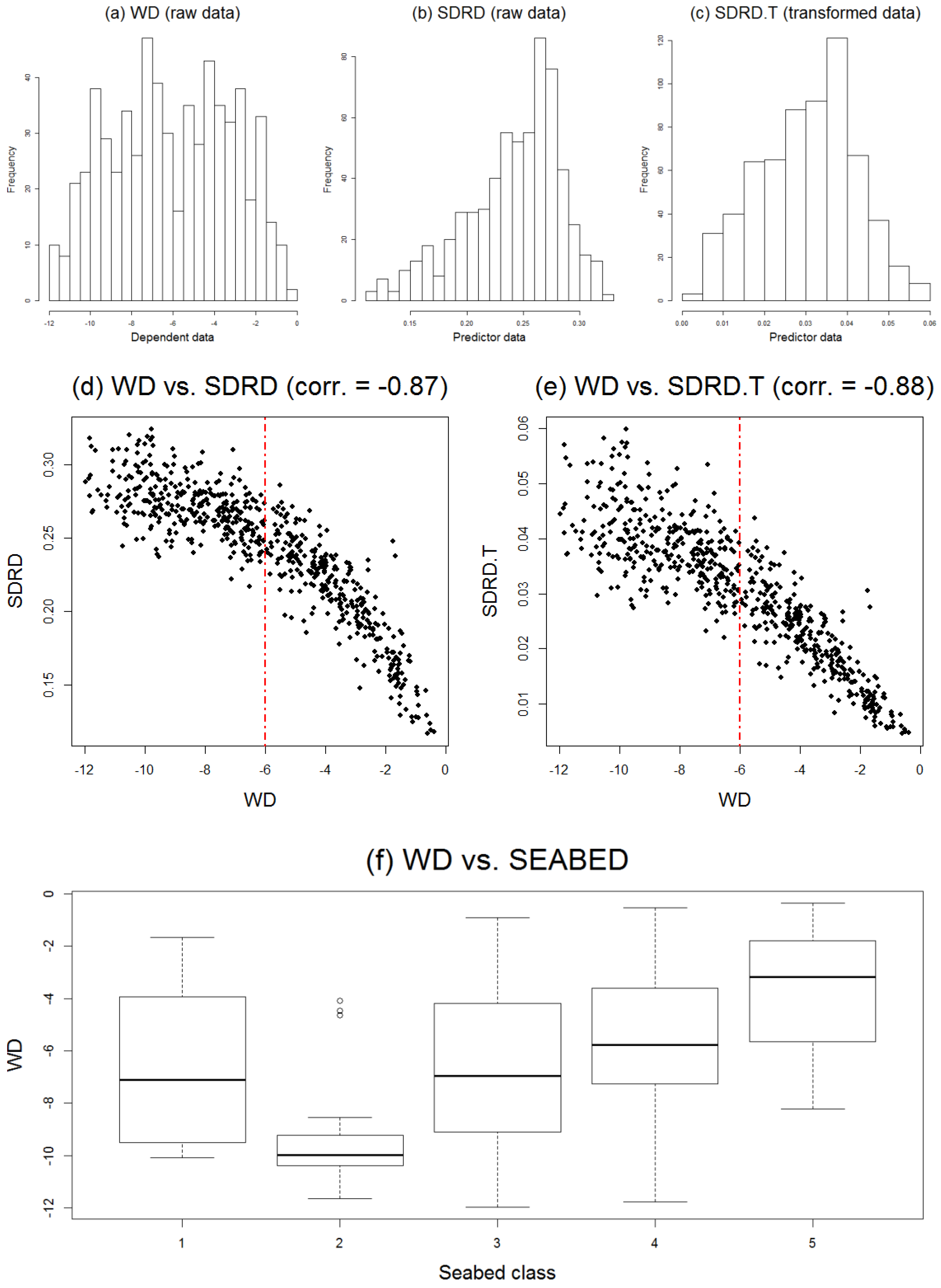
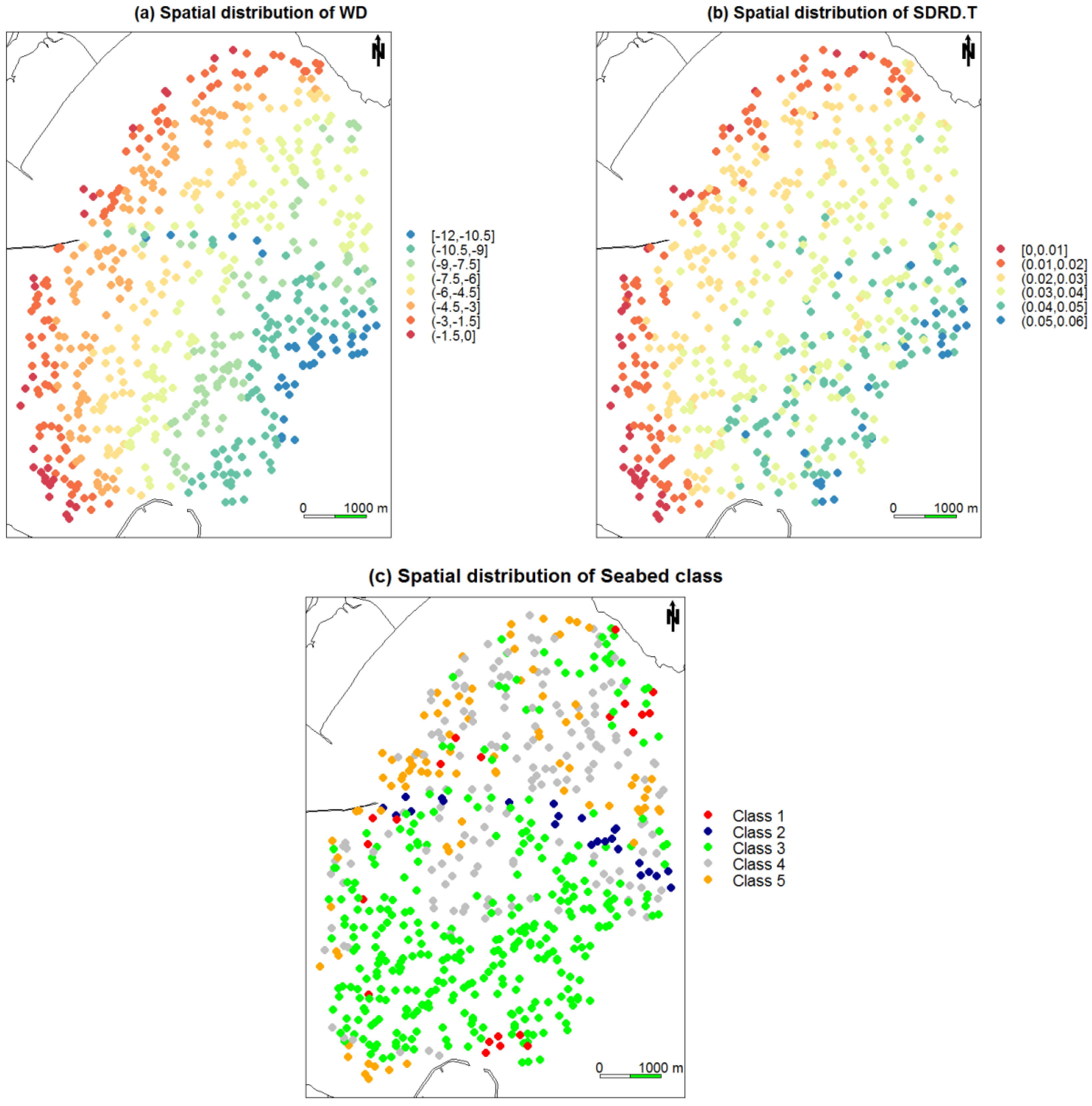
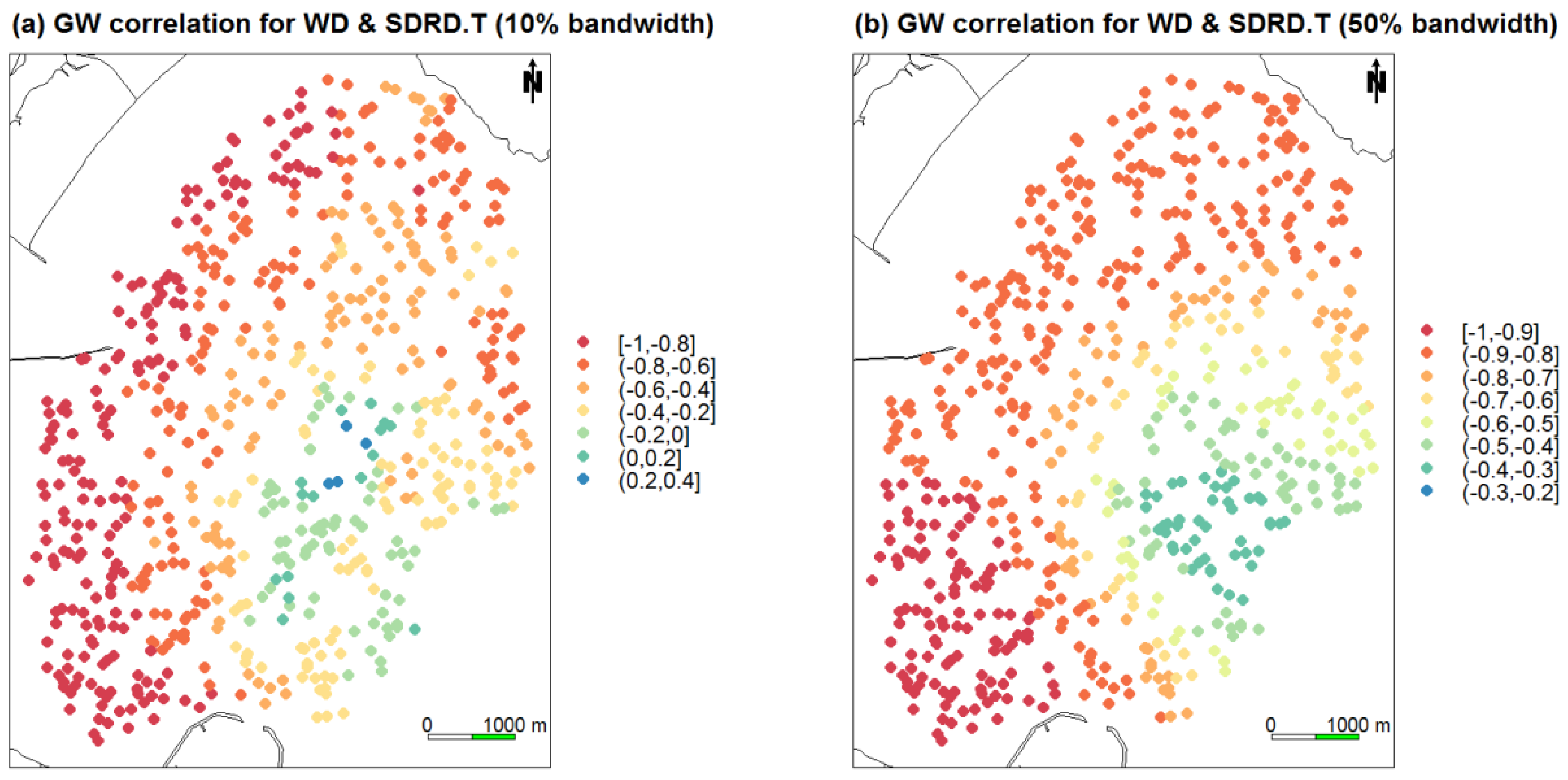
4.1. Exploratory Analyses with the Calibration Data



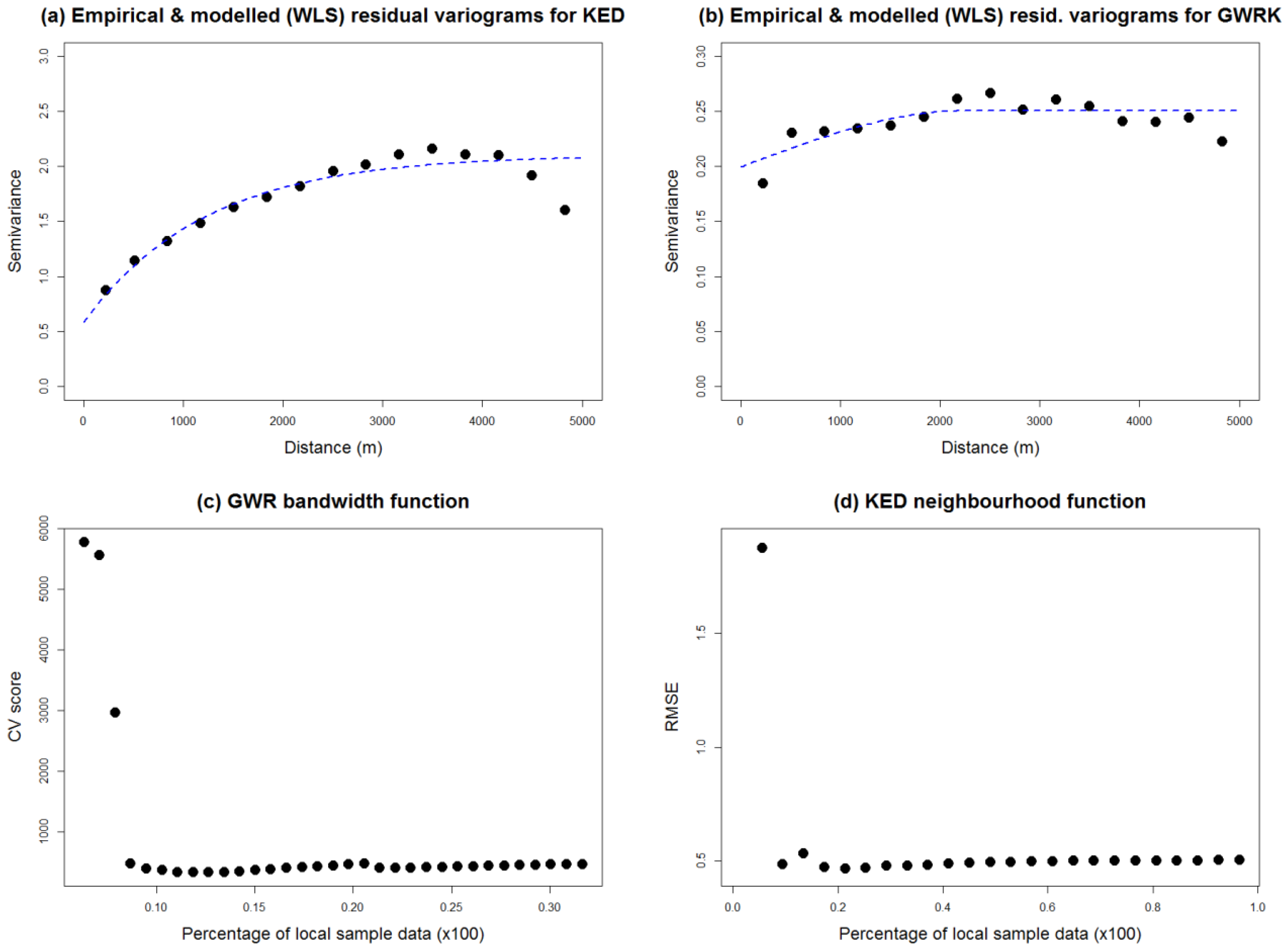
4.2. Model Calibration

4.3. Prediction Accuracy at the Validation sites
| Model | (MPE) | RMSPE | MAPE | Cor-Coef |
|---|---|---|---|---|
| (Should be Zero) | (Tend to Zero) | (Tend to Zero) | (Should be One) | |
| MLR | (−0.041) | 1.312 | 1.002 | 0.877 |
| KED-GN | (0.001) | 0.511 | 0.313 | 0.983 |
| GWR | (0.036) | 0.779 | 0.535 | 0.960 |
| GWRK | (0.038) | 0.761 | 0.522 | 0.962 |
| KED-LN | (0.027) | 0.470 | 0.283 | 0.985 |
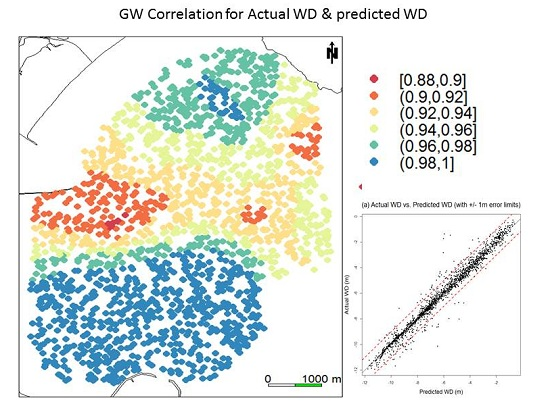
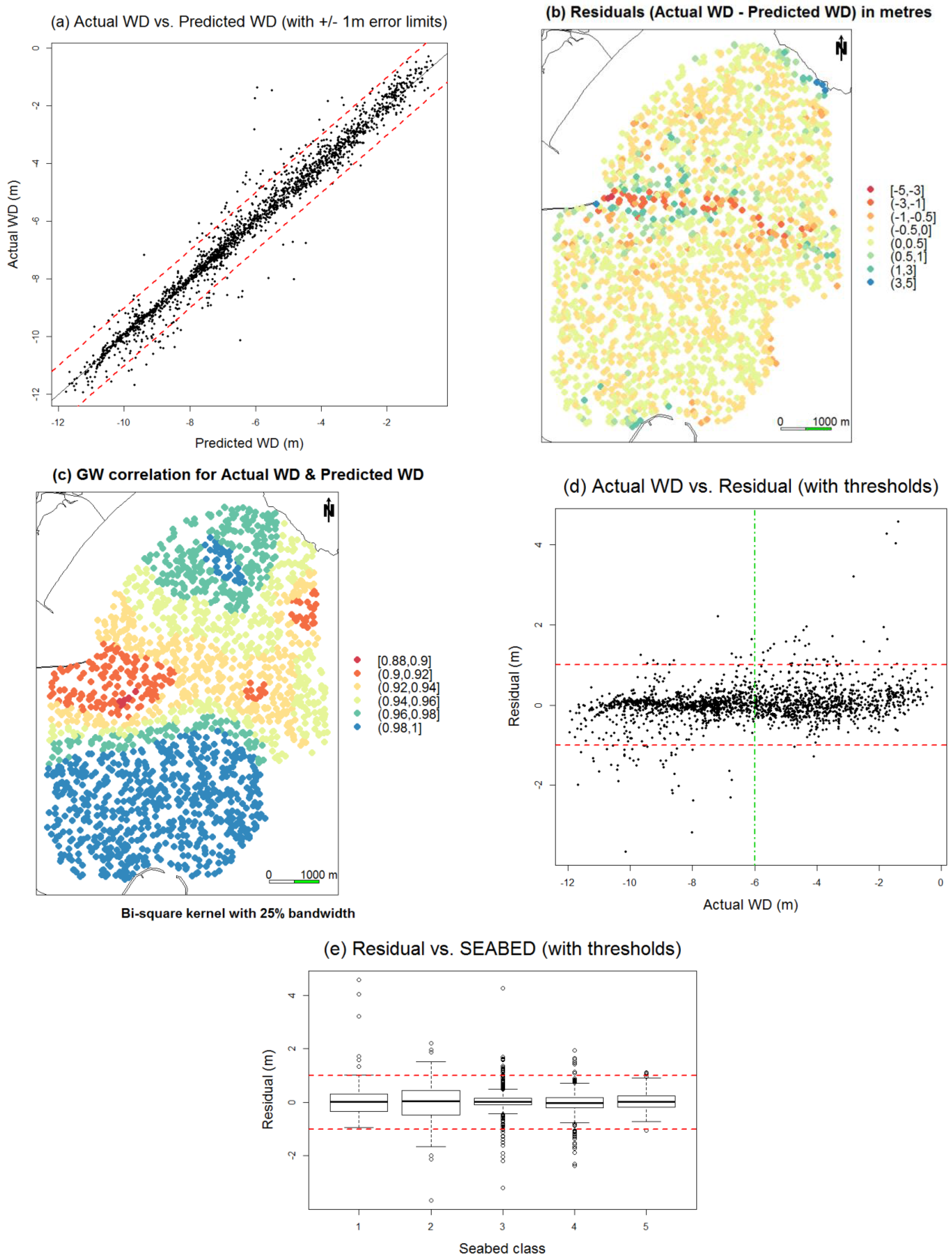
4.4. Analysis of KED-LN Performance

5. Discussion
5.1. Data Relationships
5.2. Performance of this Study’s Most Accurate Predictor (KED-LN)
5.3. The Value of our Model Comparison Exercise and Its Transferability
5.4. Expected Effects of Reduced Model Calibration Sample Size on Prediction Performance
5.5. Further Considerations
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- International Hydrographic Organization, Intergovernmental Oceanographic Commission. The IHOIOC GEBCO Cook Book; IHO Publication B11: Monaco, France, 2014. [Google Scholar]
- Kenny, A.J.; Cato, I.; Desprez, M.; Fader, G.; Schüttenhelm, R.T.E.; Side, J. An overview of seabed-mapping technologies in the context of marine habitat classification. ICES J. Mar. Sci. J. Cons. 2003, 60, 411–418. [Google Scholar] [CrossRef]
- Hedley, J.D.; Roelfsema, C.M.; Phinn, S.R.; Mumby, P.J. Environmental and sensor limitations in optical remote sensing of coral reefs: Implications for monitoring and sensor design. Remote Sens. 2012, 4, 271–302. [Google Scholar]
- McCaffrey, E.K. A review of the bathymetric swath survey system. Int. Hydrogr. Rev. 1981, 58, 19–27. [Google Scholar]
- Kachelreiss, D.; Wegmann, M.; Gollock, M.; Pettorelli, N. The application of remote sensing for marine protected area management. Ecol. Indic. 2014, 36, 169–177. [Google Scholar] [CrossRef]
- Sanchez-Carnero, N.; Acena, S.; Rodriguez-Perez, D.; Counago, E.; Fraile, P.; Freire, J. Fast and low-cost method for VBES bathymetry generation in coastal areasl. Est. Coast. Shelf Sci. 2012, 114, 175–182. [Google Scholar] [CrossRef]
- Klemas, V.; Hai-Yan, X. Subsurface and deeper ocean remote sensing from satellites: An overview and new results. Prog. Ocean. 2014, 122, 1–9. [Google Scholar] [CrossRef]
- Jena, B.; Kurian, P.J.; Swain, D.; Tyagi, A.; Ravindra, R. Prediction of bathymetry from satellite altimeter based gravity in the Arabian Sea: Mapping of two unnamed deep seamounts. Int. J. Appl. Earth. Obs. Geoinf. 2012, 16, 1–4. [Google Scholar] [CrossRef]
- Coveney, S.; Monteys, X. Integration potential of INFOMAR airborne LIDAR bathymetry with external onshore LIDAR data sets. J. Coast. Res. 2011, 62, 19–29. [Google Scholar] [CrossRef]
- Arsen, A.; Cretaux, J.-F.; Berge-Nguyen, M.; del Rio, R.A. Remote sensing derived bathymetry of Lake Poopo. Remote Sens. 2014, 6, 407–420. [Google Scholar] [CrossRef]
- Van Dongeren, A.; Plant, N.; Cohen, A.; Roelvink, D.; Haller, M.C.; Catalan, P. Beach Wizard: Nearshore bathymetry estimation through assimilation of model computations and remote observations. Coast. Eng. 2008, 55, 1016–1027. [Google Scholar] [CrossRef]
- Benny, A.H.; Dawson, G.J. Satellite imagery as aid to bathymetric charting in the Red Sea. Cartogr. J. 1983, 20, 5–16. [Google Scholar] [CrossRef]
- Spitzer, D.; Dirks, R.W.J. Classification of bottom composition and bathymetry of shallow waters by passive remote sensing. In Proceedings of the Seventh ISPRS Commission VII Symposium, Enschede, The Netherlands, 25–29 August 1986; pp. 775–777.
- Ji, W.; Civco, D.L.; Kennard, W.C. Satellite remote bathymetry: A new mechanisms for modeling. Photogramm. Engin. Remote Sens. 1992, 58, 545–549. [Google Scholar]
- Lafon, V.; Froidefond, J.M.; Lahet, F.; Castaing, P. SPOT shallow water bathymetry of a moderately turbid tidal inlet based on field measurements. Remote Sens. Environ. 2002, 81, 136–148. [Google Scholar] [CrossRef]
- Gao, J. Bathymetric mapping by means of remote sensing: Methods, accuracy and limitations. Prog. Phys. Geogr. 2009, 33, 103–116. [Google Scholar] [CrossRef]
- Jha, S.K.; Mariethoz, G.; Kelly, B.J. Bathymetry fusion using multiple-point geostatistics: Novelty and challenges in representing non-stationary bedforms. Environ. Model. Softw. 2013, 50, 66–76. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Shallow-water bathymetry using combined Lidar and passive multispectral scanner data. Int. J. Remote Sens. 1985, 6, 115–125. [Google Scholar] [CrossRef]
- Lee, Z.; Carder, K.L.; Mobley, C.D.; Steward, R.G.; Patch, J.S. Hyperspectral remote sensing for shallow waters: 2. Deriving bottom depths and water properties by optimization. Appl. Opt. 1999, 38, 3831–3843. [Google Scholar] [CrossRef] [PubMed]
- Lyzenga, D.R. Passive remote sensing techniques for mapping water depth and bottom features. Appl. Opt. 1978, 17, 379–383. [Google Scholar] [CrossRef] [PubMed]
- Stumpf, R.P.; Holderied, K.; Sinclair, M. Determination of water depth with high-resolution satellite imagery over variable bottom types. Limnol. Oceanogr. 2003, 48, 547–556. [Google Scholar] [CrossRef]
- Su, H.; Liu, H.; Heyman, W.D. Automated derivation of bathymetric information from multi-spectral satellite imagery using a non-linear inversion model. Mar. Geod. 2008, 31, 281–298. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Remote sensing of bottom reflectance and water attenuation parameters in shallow water using aircraft and Landsat data. Int. J. Remote Sens. 1981, 2, 71–82. [Google Scholar] [CrossRef]
- Vanderstraete, T.; Goossens, R.; Ghabour, T.K. Remote sensing as a tool for bathymetric mapping of coral reefs in the Red Sea. Belgian J. of Geog. 2003, 3, 257–267. [Google Scholar]
- Liu, S.; Zang, J.; Ma, Y. Bathymetric ability of SPOT-5 multi-spectral image in shallow coastal water. In Proceedings of 18th IEEE International Conference on Geoinformatics, Beijing, China, 18–20 June 2010; pp. 1–5.
- Giardino, C.; Bresciani, M.; Cazzaniga, I.; Schenk, K.; Rieger, P.; Braga, F.; Matta, E.; Brando, V.E. Evaluation of multi-resolution satellite sensors for assessing water quality and bottom depth of Lake Garda. Sensors 2014, 14, 24116–24131. [Google Scholar] [CrossRef] [PubMed]
- Kanno, A.; Tanaka, Y. Modified Lyzenga’s method for estimating generalized coefficients of satellite-based predictor of shallow water depth. IEEE Geosci. Remote Sens. Lett. 2012, 9, 715–719. [Google Scholar] [CrossRef]
- Doxani, G.; Papadopoulou, M.; Lafazani, P.; Pikridas, C.; Tsakiri-Strati, M. Shallow-water bathymetry over variable bottom types using multispectral Worldview-2. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, 159–164. [Google Scholar] [CrossRef]
- Conger, C.L.; Hochberg, E.J.; Fletcher, H.C.; Atkinson, M.J. Decorrelating remote sensing color bands from bathymetry in optically shallow waters. IEEE Trans. Geo. Rem. Sens. 2006, 44, 1655–1660. [Google Scholar] [CrossRef]
- Lyons, M.; Phinn, S.; Roelfsema, C. Integrating Quickbird multi-spectral satellite and field data: mapping bathymetry, seagrass cover, seagrass species and change in Moreton Bay, Australia in 2004 and 2007. Remote Sens. 2011, 3, 42–64. [Google Scholar] [CrossRef]
- Ohlendorf, S.; Müller, A.; Heege, T.; Cerdeira-Estrada, S.; Kobryn, H.T. Bathymetry mapping and sea floor classification using multispectral satellite data and standardized physics-based data processing. Proc. SPIE 2011. [Google Scholar] [CrossRef]
- Ceyhun, O.; Yalçın, A. Remote sensing of water depths in shallow waters via artificial neural networks. Estuar. Coast. Shelf Sci. 2010, 89, 89–96. [Google Scholar] [CrossRef]
- Flener, C.; Vaaja, M.; Jaakola, A.; Krooks, A.; Kaartinen, H.; Kukko, A.; Kasvi, E.; Hyyppä, H.; Hyyppä, J.; Alho, P. Seamless mapping of river channels at high resolution using mobile LiDAR and UAV-photography. Remote Sens. 2013, 5, 6382–6407. [Google Scholar] [CrossRef]
- Su, H.; Liu, H.; Wang, L.; Filippi, A.M.; Heyman, W.D.; Beck, R. Geographically adaptive inversion model for improving bathymetric retrieval from satellite multispectral imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 465–476. [Google Scholar] [CrossRef]
- Brunsdon, C.; Fotheringham, A.S.; Charlton, M.E. Geographically weighted regression: A method for exploring spatial nonstationarity. Geogr. Anal. 1996, 28, 281–289. [Google Scholar] [CrossRef]
- Li, J.; Heap, A.D. Spatial interpolation methods applied in the environmental sciences: A review. Environ. Modell. Softw. 2014, 53, 173–189. [Google Scholar]
- Harris, P.; Fotheringham, A.S.; Crespo, R.; Charlton, M. The use of geographically weighted regression for spatial prediction: An evaluation of models using simulated data sets. Math. Geosci. 2010, 42, 657–680. [Google Scholar] [CrossRef]
- Harris, P.; Juggins, S. Estimating freshwater acidification critical load exceedance data for Great Britain using space-varying relationship models. Math. Geosci. 2011, 43, 265–292. [Google Scholar] [CrossRef]
- Chilès, J.P.; Delfiner, P. Geostatistics: Modelling Spatial Uncertainty; John Wiley & Sons: Hoboken, NJ, USA, 1999. [Google Scholar]
- Harris, P.; Brunsdon, C.; Charlton, M. The comap as a diagnostic tool for nonstationary kriging models. Int. J. Geogr. Inf. Sci. 2013, 27, 511–554. [Google Scholar] [CrossRef]
- Roth, S.; Wilson, J.G. Functional analysis by trophic guilds of macrobenthic community structure in Dublin Bay, Ireland. J. Exp. Mar. Biol. Ecol. 1998, 222, 195–217. [Google Scholar] [CrossRef]
- Wilson, J.G.; Davis, J.P. The population structure and ecology of Nucula turgida (Leckenby and Marshall) in Dublin Bay. Prog. Underwat. Sci. 1983, 8, 53–60. [Google Scholar]
- Roche, M.; Degrendele, K.; De Mol, L.; Schotte, P.; Vandenreyken, H.; Van den Branden, R.; N de Schepper, G. Extraction on the Belgian continental shelf. Extr. Belg. Cont. Shelf 2011, 3, 10–20. [Google Scholar]
- Kallio, K.; Attila, J.; Härmä, P.; Koponen, S.; Pulliainen, J.; Hyytiäinen, U.M.; Pyhälahti, T. Landsat ETM+ images in the estimation of seasonal lake water quality in boreal river basins. Environ. Manag. 2008, 42, 511–522. [Google Scholar] [CrossRef] [PubMed]
- Kutser, T. The possibility of using the Landsat image archive for monitoring long time trends in coloured dissolved organic matter concentration in lake waters. Remote Sens. Environ. 2012, 123, 334–338. [Google Scholar] [CrossRef]
- Goodman, J.A.; Lee, Z.; Ustin, S.L. Influence of atmospheric and sea-surface corrections on retrieval of bottom depth and reflectance using a semi-analytical model: A case study in Kaneohe Bay, Hawaii. Appl. Opt. 2008, 47, F1–F11. [Google Scholar] [CrossRef] [PubMed]
- Wolf, P.; Rößler, S.; Schneider, T.; Melzer, A. Evaluation of the anisotropy factor on aquatic test sites caused by RapidEye off-nadir data acquisition with the Mobile Goniometric System (MGS). In Proceedings of 5th RESA Workshop—From the Basics to the Service, Neustrelitz, Germany, 20–21 March 2013; pp. 221–237.
- Rößler, S. Methods for Multitemporal Mapping of Submerged Macrophytes Using Multi- and Hyperspectral Remote Sensing. Ph.D. Thesis, Technischen Universitat Munchen, Munich, Germany, 2014. [Google Scholar]
- Kay, S.; Hedley, J.D.; Lavender, S. Sun glint correction of high and low spatial resolution images of aquatic scenes: A review of methods for visible and near-infrared wavelengths. Remote Sens. 2009, 1, 697–730. [Google Scholar] [CrossRef]
- Hedley, J.D.; Harborne, A.R.; Mumby, P.J. Simple and robust removal of sun glint for mapping shallow-water benthos. Int Journ Remote Sens. 2005, 26, 2107–2112. [Google Scholar] [CrossRef]
- Pattanaik, A.; Sahu, K.; Bhutiyani, M. Estimation of shallow water bathymetry using IRS-multispectral imagery of Odisha Coast, India. Int. Aquat. Proced. 2015, 4, 173–181. [Google Scholar] [CrossRef]
- Jawak, S.D.; Luis, A.J. Spectral information analysis for the semiautomatic derivation of shallow lake bathymetry using high-resolution multispectral imagery: A case study of Antarctic coastal oasis. Int. Aquat. Proced. 2015, 4, 1331–1338. [Google Scholar] [CrossRef]
- Dierssen, H.M.; Zimmerman, R.C.; Leathers, R.A.; Downes, T.V.; Davis, C.O. Ocean color remote sensing of seagrass and bathymetry in the Bahamas Banks by high-resolution airborne imagery. Limnol. Oceanogr. 2003, 48, 444–455. [Google Scholar] [CrossRef]
- Hogrefe, K.; Wright, D.; Hochberg, E.J. Derivation and integration of shallow-water bathymetry: Implications for coastal terrain modeling and subsequent analyses. Mar. Geod. 2008, 31, 299–317. [Google Scholar] [CrossRef]
- Goovaerts, P. Geostatistics for Natural Resources Evaluation; Oxford University Press: Oxford, UK, 1997. [Google Scholar]
- Schabenberger, O.; Gotway, C. Statistical Methods for Spatial Data Analysis; Chapman & Hall: London, UK, 2005. [Google Scholar]
- Harris, P.; Brunsdon, C.; Fotheringham, A.S. Links, comparisons and extensions of the geographically weighted regression model when used as a spatial predictor. Stoch. Environ. Res. Risk Assess. 2011, 25, 123–138. [Google Scholar] [CrossRef]
- Cressie, N.A. The Many Faces of Spatial Prediction; Springer Netherlands: Dordrecht, The Netherlands, 1989. [Google Scholar]
- Harris, P.; Clarke, A.; Juggins, S.; Brunsdon, C.; Charlton, M. Geographically weighted methods and their use in network re-designs for environmental monitoring. Stoch. Environ. Res. Risk Assess. 2014, 28, 1869–1887. [Google Scholar] [CrossRef]
- Pardo-Igúzquiza, E.; Dowd, P.A. EMLK2D: A computer program for spatial estimation using empirical maximum likelihood kriging. Comput. Geosci. 2005, 31, 361–370. [Google Scholar] [CrossRef]
- Finlay, A.O.; Banerjee, S.; Gelfand, A.E. Bayesian dynamic modeling for large space-time datasets using Gaussian predictive processes. J. Geogr. Syst. 2012, 14, 29–47. [Google Scholar] [CrossRef]
- Harris, P.; Clarke, A.; Juggins, S.; Brunsdon, C.; Charlton, M. Enhancements to a geographically weighted principal components analysis in the context of an application to an environmental data set. Geogr. Anal. 2015, 47, 146–172. [Google Scholar] [CrossRef]
- Gribov, A.; Krivoruchko, K. Local polynomials for data detrending and interpolation in the presence of barriers. Stoch. Environ. Res. Risk Assess. 2011, 25, 1057–1063. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Monteys, X.; Harris, P.; Caloca, S.; Cahalane, C. Spatial Prediction of Coastal Bathymetry Based on Multispectral Satellite Imagery and Multibeam Data. Remote Sens. 2015, 7, 13782-13806. https://doi.org/10.3390/rs71013782
Monteys X, Harris P, Caloca S, Cahalane C. Spatial Prediction of Coastal Bathymetry Based on Multispectral Satellite Imagery and Multibeam Data. Remote Sensing. 2015; 7(10):13782-13806. https://doi.org/10.3390/rs71013782
Chicago/Turabian StyleMonteys, Xavier, Paul Harris, Silvia Caloca, and Conor Cahalane. 2015. "Spatial Prediction of Coastal Bathymetry Based on Multispectral Satellite Imagery and Multibeam Data" Remote Sensing 7, no. 10: 13782-13806. https://doi.org/10.3390/rs71013782