3.1. Spectral Matching between GF-1/WFV and OLI
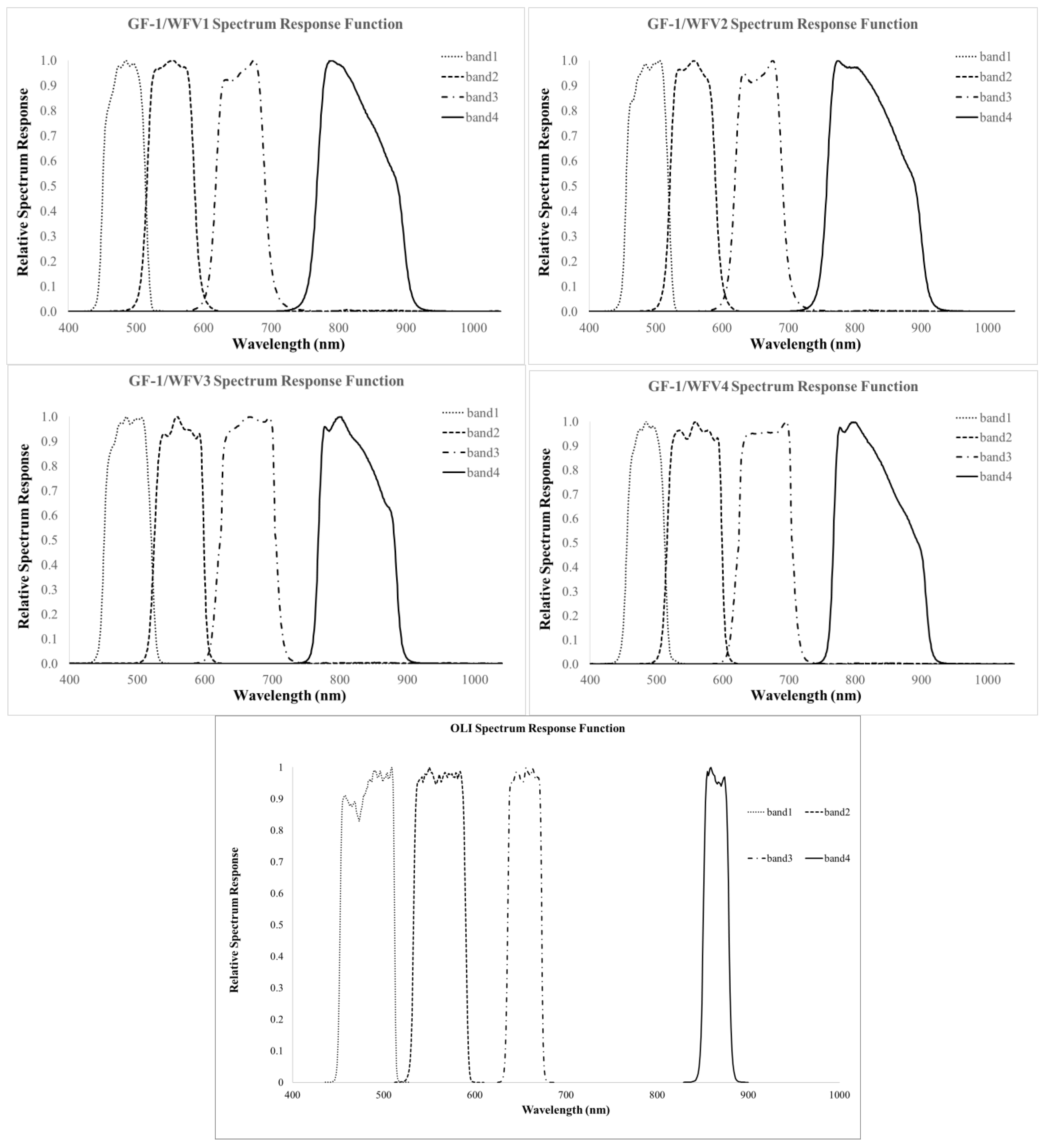
Because the spectral responses of the Landsat-8/OLI and the GF-1/WFV are different, the spectral matching between the two different sensors needs to be completed. The relative spectral response profiles of the GF-1/WFV and the Landsat-8/OLI are plotted in
Figure 3. To simulate the GF-1/WFV reflectance of the calibration site, the spectral matching factors are calculated to account for the difference induced by the spectral response function between the GF-1/WFV and the Landsat-8/OLI. The spectral matching factor is defined as [
1,
30,
31].
where
is the spectral matching factor;
is the spectral wavelength;
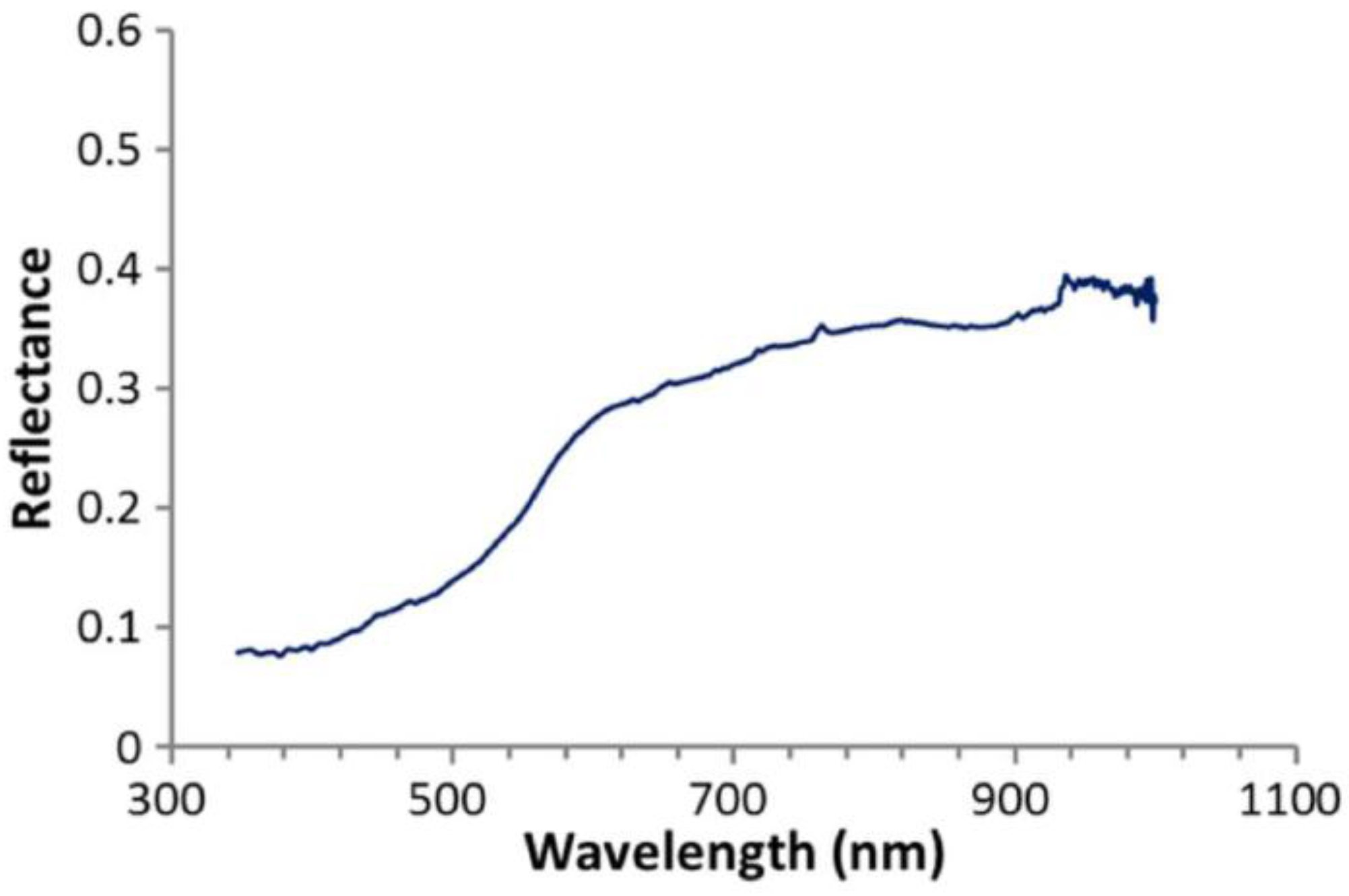
is the ground-measured spectrum of the desert at the calibration site, which is plotted in
Figure 4;
fGF (λ) and
fGF (λ) are the relative spectral response functions for GF-1/WFV and Landsat-8/OLI, respectively. λ
1-λ
2 is the spectral range of GF-1/WFV; λ
3-λ
4 is the spectral range of Landsat-8/OLI.
Figure 3.
Relative spectral response profiles of GF-1/WFVs and Landsat-8/OLI in corresponding first to fourth wavelength regions.
Figure 3.
Relative spectral response profiles of GF-1/WFVs and Landsat-8/OLI in corresponding first to fourth wavelength regions.
The ground-measured spectrum of the calibration site we used in this paper, which is shown in
Figure 4, comes from the measurement in the Badain Jaran Desert using an SVC HR-1024 high-resolution field portable spectroradiometer on 13–14 July 2012 [
1]. Based on the definition of the spectral matching factor, the spectral matching factors between the GF-1/WFV and the Landsat-8/OLI are calculated and listed in
Table 4.
Figure 4.
Spectra plot of the calibration site.
Figure 4.
Spectra plot of the calibration site.
Table 4.
Spectral matching factor between GF-1/WFV and Landsat-8/OLI.
Table 4.
Spectral matching factor between GF-1/WFV and Landsat-8/OLI.
| | Sensor | Spectral Matching Factor Between GF-1/WFV and Landsat-8/OLI |
|---|
| Band | | GF-1/WFV1 | GF-1/WFV2 | GF-1/WFV3 | GF-1/WFV4 |
|---|
| 1 | 1.0012 | 1.0269 | 1.0218 | 1.0053 |
| 2 | 0.9361 | 0.9668 | 1.0068 | 0.9755 |
| 3 | 0.9990 | 0.9995 | 1.0104 | 1.0107 |
| 4 | 1.0021 | 1.0009 | 1.0019 | 1.0032 |
3.2. BRDF Fitting and Surface Reflectance of GF-1/WFV Calculation
To obtain an accurate BRDF characterization of the calibration site, the surface reflectance needs to be retrieved first. We collected 18 clean OLI images that covered the calibration site in 2013 and 2014. The selected OLI scenes and their acquisition date and solar angle are listed in
Table 6. Because many clear lakes, which can be seen as dark objects, are located within the calibration site, the DO method is used to retrieve the AOD at 550 nm. The DO method is a widely used method for the atmospheric correction of remotely sensed imagery, and the advantages of the methods are its easy performance and high accuracy [
32,
33]. This method supposes that there is an area in the image where the reflectance is so small that it can be neglected (such as hill shading, dense vegetation, and clean water). The radiance of this area is then considered to be caused only by the atmosphere, so the AOD can be calculated through radiative transfer code, as 6S [
34], and other methods, like per-pixel method [
35,
36]. In this study, the clear lakes in the calibration site can be considered DO to be used for atmospheric correction. The steps of AOD retrieval are as follows:
- (1)
Calculate the radiance of these selected images. The radiance of the Landsat-8/OLI image can be calculated using [
17]
where
Lλ is the TOA radiance;
Mλ is the band-specific multiplicative rescaling factor from the metadata (RADIANCE_MULT_BAND_X, where
X is the band number);
Aλ is the band-specific additive rescaling factor from the metadata (RADIANCE_ADD_BAND_X, where
X is the band number); and
Qcal is the quantized and calibrated standard product pixel values (
DN). The unit for
Lλ is
.
- (2)
Extract the radiance on the clear lake area for band 2. For clean water, the reflectance is low in the blue band (450–520 nm), and the radiance calculated in step (1) can be seen as atmospheric path radiance.
- (3)
Set up the input parameters for the 6S model. The parameters in the 6S model include the atmospheric model, aerosol model, solar zenith and azimuth, view zenith and azimuth, wavelength, surface reflectance, and AOD. For example, the input parameters for the image on 16 April 2013 are listed in
Table 5. In this table, only AOD can be changed, and every input AOD corresponds to a TOA radiance as output.
Table 5.
Parameter setup for the image on 16 April 2013.
Table 5.
Parameter setup for the image on 16 April 2013.
| Input Parameters | Value | Notation |
|---|
| Atmospheric model | 2 | Min-latitude summer |
| Aerosol model | 5 | Shettle model for background desert aerosol |
| Solar zenith | 144.7937 | Read from header file of OLI image |
| Solar azimuth | 55.4264 | Read from header file of OLI image |
| View zenith | 0 | OLI is nadir viewing |
| View azimuth | 0 | OLI is nadir viewing |
| Wavelength | 450–520 nm | Blue band |
| Surface reflectance | 0 | Clearwater surface is set as 0 |
| AOD set | 0.0:0.1:3.0 | From 0.0 to 3.0 interval 0.1 |
- (4)
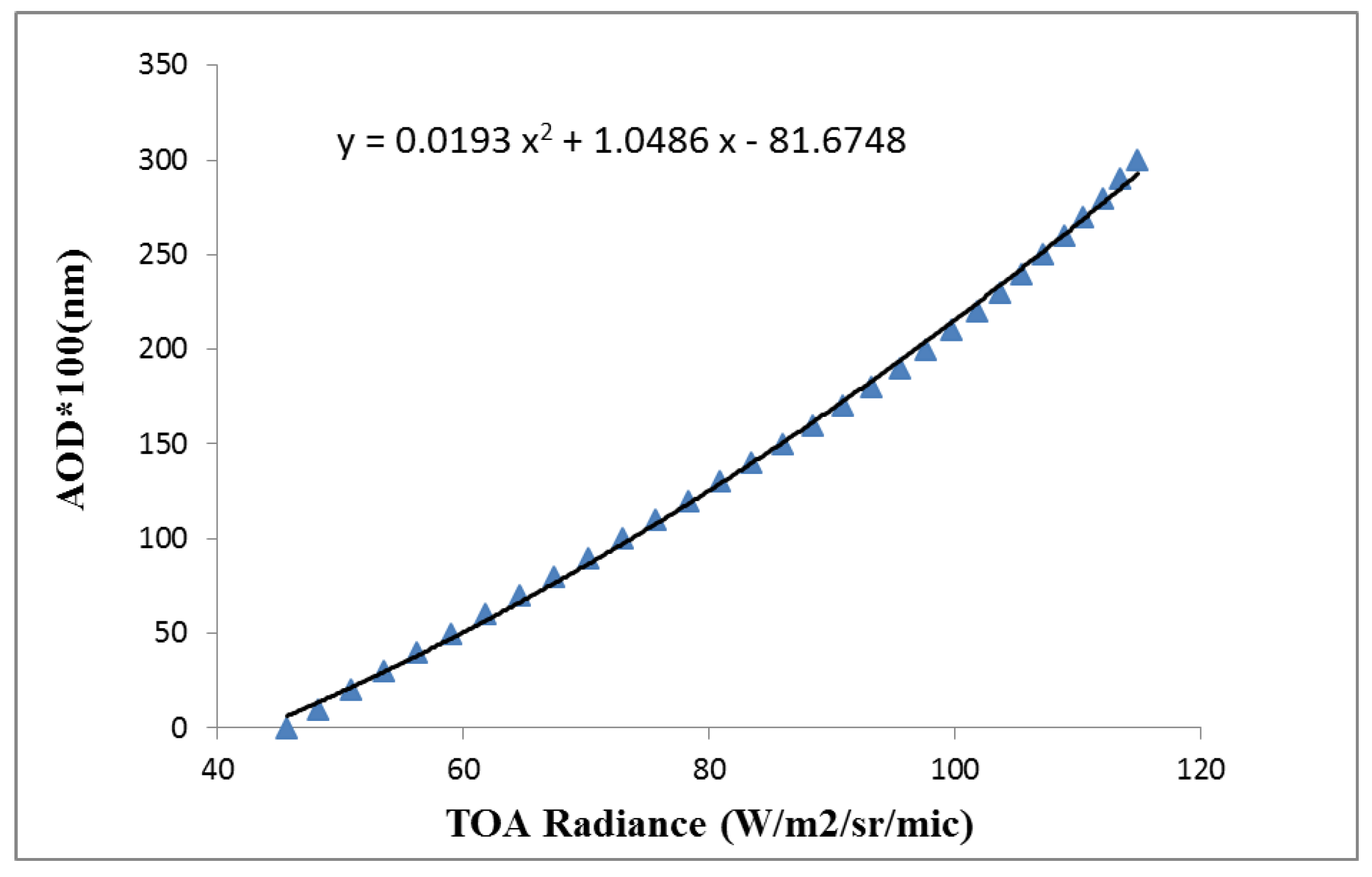
Fit the relationship between AOD and TOA radiance and interpolate the AOD with the radiance extracted in step (2). For example, for the image on 16 April 2013, the relationship between AOD and TOA radiance can be fitted as a quadratic equation, which is plotted in
Figure 5. Therefore, the AOD can be interpolated using the TOA radiance retrieved from the image.
Figure 5.
Example of AOD retrieval using the DO method.
Figure 5.
Example of AOD retrieval using the DO method.
Finally, the AODs for all selected images can be retrieved based on the above steps and are shown in
Table 6. The atmospheric effect can be corrected with the retrieved AODs for these selected images because the site is hardly influenced by human activities. After atmospheric correction, the surface reflectance of these selected images can be obtained.
Table 6.
Acquisition times and retrieved AODs of the selected images.
Table 6.
Acquisition times and retrieved AODs of the selected images.
| OLI Scene | Acquisition Time (YYYY/MM/DD) | Sun Azimuth(°) | Sun Elevation(°) | Retrieved AOD at 550 nm |
|---|
| LC81320322013115LGN01 | 2013/04/25 | 142.9618 | 58.3580 | 0.0119 |
| LC81320322013163LGN00 | 2013/06/12 | 130.2973 | 66.4286 | 0.2388 |
| LC81320322013275LGN00 | 2013/10/02 | 156.5397 | 43.6109 | 0.2446 |
| LC81320322013291LGN00 | 2013/10/18 | 160.1080 | 38.1122 | 0.0029 |
| LC81320322013307LGN00 | 2013/11/03 | 162.2424 | 32.9450 | 0.0434 |
| LC81320322013339LGN00 | 2013/12/05 | 162.3984 | 25.4647 | 0.0169 |
| LC81320322013355LGN00 | 2013/12/21 | 160.8491 | 23.9861 | 0.0852 |
| LC81330322014061LGN00 | 2014/03/02 | 150.7158 | 38.1367 | 0.1556 |
| LC81330322014045LGN00 | 2014/02/14 | 152.8417 | 32.5780 | 0.2441 |
| LC81330322013362LGN00 | 2013/12/28 | 159.9492 | 23.9154 | 0.0149 |
| LC81330322013346LGN00 | 2013/12/12 | 161.8216 | 24.5987 | 0.0031 |
| LC81330322013330LGN00 | 2013/11/26 | 162.8562 | 27.0349 | 0.0049 |
| LC81330322013186LGN00 | 2013/07/05 | 128.8544 | 65.4402 | 0.0595 |
| LC81330322013154LGN00 | 2013/06/03 | 132.3370 | 66.0213 | 0.3609 |
| LC81330322013122LGN01 | 2013/05/02 | 141.3082 | 60.3896 | 0.1428 |
| LC81330322013106LGN01 | 2013/04/16 | 144.7937 | 55.4264 | 0.3759 |
| LC81320322014038LGN00 | 2014/02/07 | 153.8301 | 30.4546 | 0.3952 |
| LC81320322014022LGN00 | 2014/01/22 | 156.2278 | 26.5810 | 0.0627 |
Because the topography of the calibration site is hilly, the solar illuminations and view geometries corresponding to the slopes vary in a very large range. That is, the solar angles of the slope (the zenith and azimuth angles) and the viewing angles of the slope (the zenith and azimuth angles) are varied pixel by pixel, even though these pixels are all nadir viewed in Landsat-8/OLI imagery. For this calibration site, only if the solar illuminations and view geometries of every pixel corresponding to slopes in nadir-viewing Landsat-8/OLI imagery are known can the BRDF consequently be reconstructed. In this paper, the BRDF characterization of the calibration is reconstructed based on the BRDF fitting method developed by Zhong
et al. [
1]. For every pixel in remotely sensed imagery, the solar illuminations and view geometries of slopes are determined only by the slope and the aspect given the positions of the sun and the sensor. Because the slope and the aspect of the calibration site can be calculated from the DEM extracted by ZY-3/TLC, the pixel’s solar illumination and view geometries can be calculated. Notably, the slope and aspect calculated are in a local coordinate system, whereas the solar illuminations and view geometries are in the global coordinate system. Therefore, the coordinates in the global coordinate system need to be converted to those in the local coordinate system. The sun-view geometries of the local coordinate system are the real sun-view geometries of every pixel.
To keep more information, the 4-D surface (the solar zenith range of the slope, the view zenith range of the slope, the relative azimuth range of the slope, and the surface reflectance) is used to characterize the site’s BRDF instead of statistical BRDF models. In the 4-D surface, the solar zenith range of slope, the view zenith range of slope and relative azimuth range of slope are variables. Then, a lookup table (LUT) is established with the solar zenith angle of the slope, the view zenith angle of the slope and the relative azimuth angle of the slope as inputs and the surface reflectance as the output. Therefore, for any combination of the solar zenith angle of the slope, the view zenith angle of the slope and the relative azimuth angle of the slope, the corresponding surface reflectance can be obtained from the lookup table by interpolating.
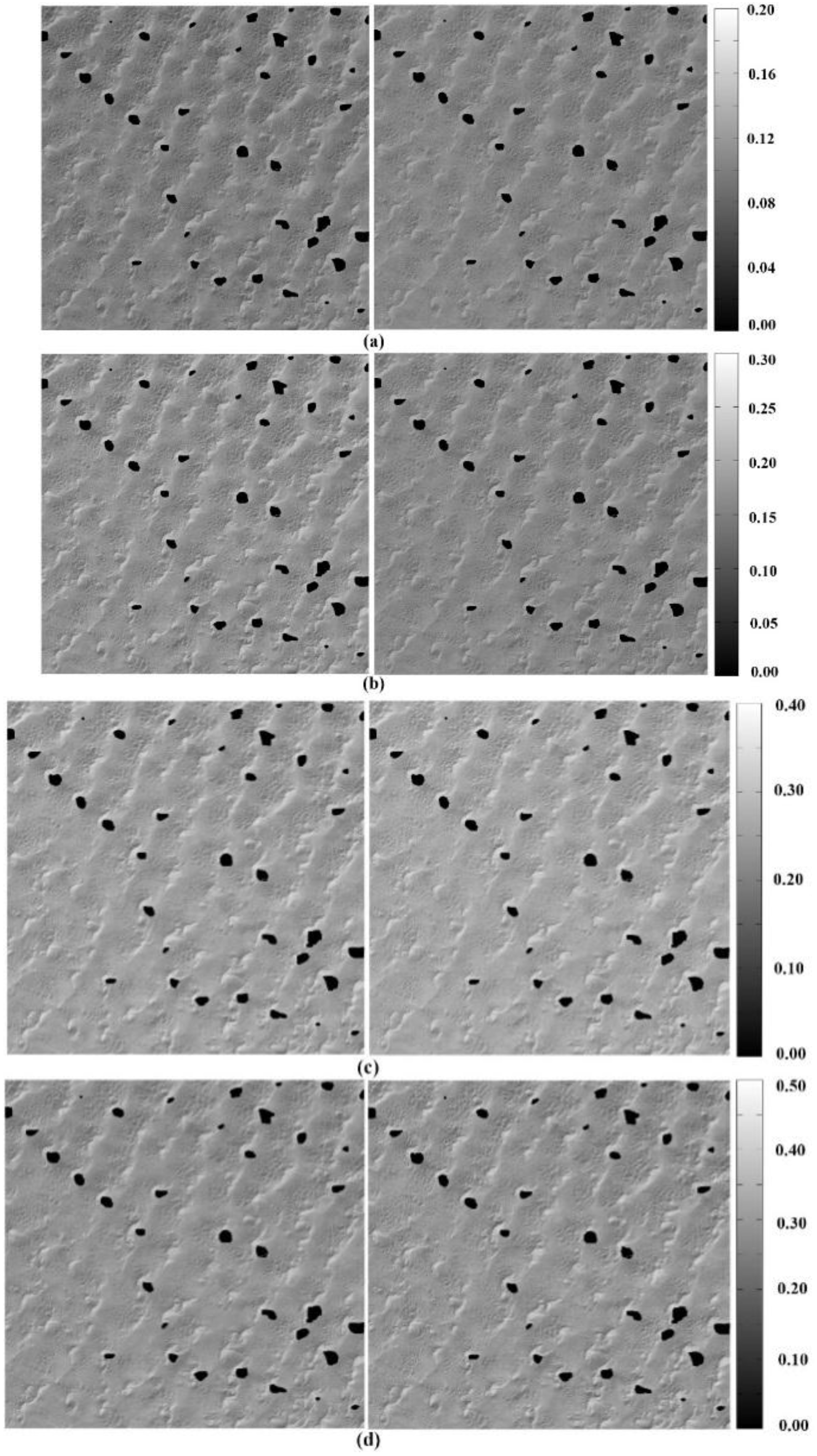
To verify the accuracy of the fitted BRDF LUT, 9 other OLI images are selected, and the surface reflectance of these chosen images is simulated using the established LUT.
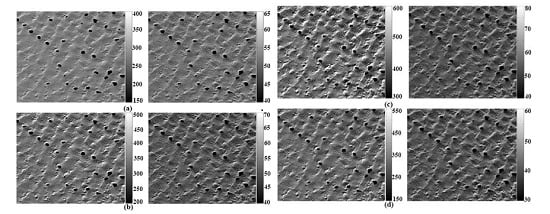
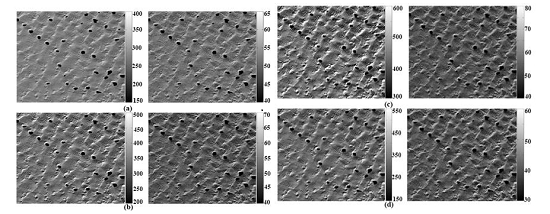
Figure 6 shows an example of simulation of the Landsat-8/OLI imagery on 18 March 2014. The mean surface reflectance of every image is then compared with that of the actual Landsat-8/OLI imagery (atmosphere corrected using the aforementioned DO method).
Figure 6.
Example of simulated surface reflectance and its corresponding actual surface reflectance. (a) Simulated surface reflectance (left) and actual surface reflectance (right) of band 2. (b) Simulated surface reflectance (left) and actual surface reflectance (right) of band 3. (c) Simulated surface reflectance (left) and actual surface reflectance (right) of band 4. (d) Simulated surface reflectance (left) and actual surface reflectance (right) of band 5.
Figure 6.
Example of simulated surface reflectance and its corresponding actual surface reflectance. (a) Simulated surface reflectance (left) and actual surface reflectance (right) of band 2. (b) Simulated surface reflectance (left) and actual surface reflectance (right) of band 3. (c) Simulated surface reflectance (left) and actual surface reflectance (right) of band 4. (d) Simulated surface reflectance (left) and actual surface reflectance (right) of band 5.
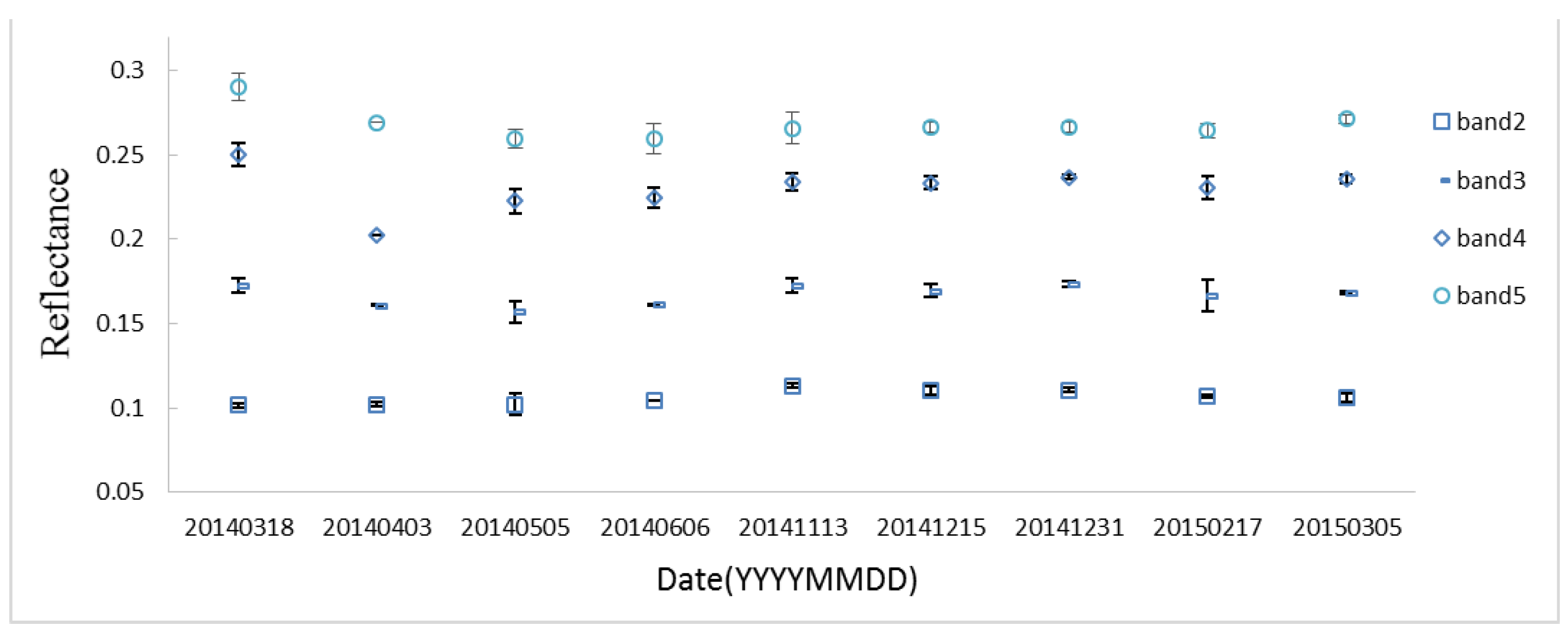
The comparison results for band 2 of all 9 OLI images between the mean simulated and actual surface reflectance are listed in
Table 7, and the difference errors in percentage for bands 2–5 are plotted in
Figure 7. The actual surface reflectance is from the retrieved imagery after atmospheric correction and the simulated one is simulated from the fitted BRDF characterization. The differences between the two are usually less than 5%.
Compared with the actual OLI images, the mean difference errors of the simulated images for all the 9 OLI images are 1.82% for band 2, 2.10% for band 3, 1.88% for band 4, and 1.94% for band 5. Subsequently, the derived BRDF characterization has excellent agreement with the real situation. Consequently, the BRDF characterization can be used to simulate the surface reflectance of other similar sensors, such as the GF-1/WFV, effectively.
Table 7.
Comparison between actual surface reflectance and the simulated one on band 2 of OLI. Actual surface reflectance is from the retrieved imagery after atmospheric correction and the simulated one is simulated from the fitted BRDF characterization. The differences between the two are very small, so the fitted BRDF characterization can be used to simulate the surface reflectance of other similar sensors.
Table 7.
Comparison between actual surface reflectance and the simulated one on band 2 of OLI. Actual surface reflectance is from the retrieved imagery after atmospheric correction and the simulated one is simulated from the fitted BRDF characterization. The differences between the two are very small, so the fitted BRDF characterization can be used to simulate the surface reflectance of other similar sensors.
| Acquisition Time (YYYY.MM.DD) | Actual Surface Reflectance (ρ') | Simulated Surface Reflectance (ρ') | Difference (ρ'-ρ') | Difference Error (%) |
|---|
| 2014.03.18 | 0.1114 | 0.1128 | 0.0014 | 1.22 |
| 2014.04.03 | 0.1021 | 0.1006 | −0.0015 | 1.49 |
| 2014.05.05 | 0.1021 | 0.1082 | 0.0061 | 5.94 |
| 2014.06.06 | 0.1045 | 0.1044 | −0.0002 | 0.15 |
| 2014.11.13 | 0.1132 | 0.1122 | −0.0010 | 0.86 |
| 2014.12.15 | 0.1105 | 0.1132 | 0.0027 | 2.43 |
| 2014.12.31 | 0.1107 | 0.1120 | 0.0013 | 1.19 |
| 2015.02.17 | 0.1167 | 0.1177 | 0.0011 | 0.90 |
| 2015.03.05 | 0.1059 | 0.1082 | 0.0023 | 2.20 |
Figure 7.
Difference error between the actual and simulated surface reflectance for OLI bands 2–5 corresponding to the lines in the figure from bottom to top, respectively.
Figure 7.
Difference error between the actual and simulated surface reflectance for OLI bands 2–5 corresponding to the lines in the figure from bottom to top, respectively.
In this paper, 14 scenes of GF-1/WFV (4 scenes for the GF-1/WFV1, 2 scenes for the GF-1/WFV2, 2 scenes for the GF-1/WFV3, 6 scenes for the GF-1/WFV4) that covered the calibration site are chosen. Information on these selected GF-1/WFVs images is listed in
Table 8. The surface reflectance of these selected scenes is retrieved with the BRDF LUT established with the Landsat-8/OLI and DEM extracted by the ZY-3/TLC.
Table 8.
Information of selected GF-1/WFVs images.
Table 8.
Information of selected GF-1/WFVs images.
| Sensor | Acquisition Time (YYYY/MM/DD) | Day of Year | Sun_Azimuth (°) | Sun_Elevation (°) |
|---|
| Gf-1/WFV1 | 2014/03/19 | 78 | 154.0470 | 46.6876 |
| 2014/08/30 | 242 | 153.7930 | 56.8938 |
| 2013/11/29 | 333 | 165.6380 | 27.5476 |
| 2013/12/03 | 337 | 165.4560 | 26.8842 |
| GF-1/WFV2 | 2014/09/28 | 271 | 166.1860 | 47.8796 |
| 2014/01/21 | 22 | 162.2180 | 28.8269 |
| GF-1/WFV3 | 2014/02/11 | 42 | 162.8680 | 33.7337 |
| 2014/10/24 | 297 | 173.8830 | 37.8871 |
| GF-1/WFV4 | 2014/01/18 | 18 | 167.5590 | 28.3773 |
| 2014/11/13 | 317 | 177.2160 | 31.9344 |
| 2013/08/09 | 221 | 152.9710 | 63.5083 |
| 2013/11/18 | 322 | 173.5370 | 30.4243 |
| 2014/01/26 | 26 | 166.7120 | 30.0972 |
| 2013/11/26 | 330 | 173.2250 | 28.6828 |
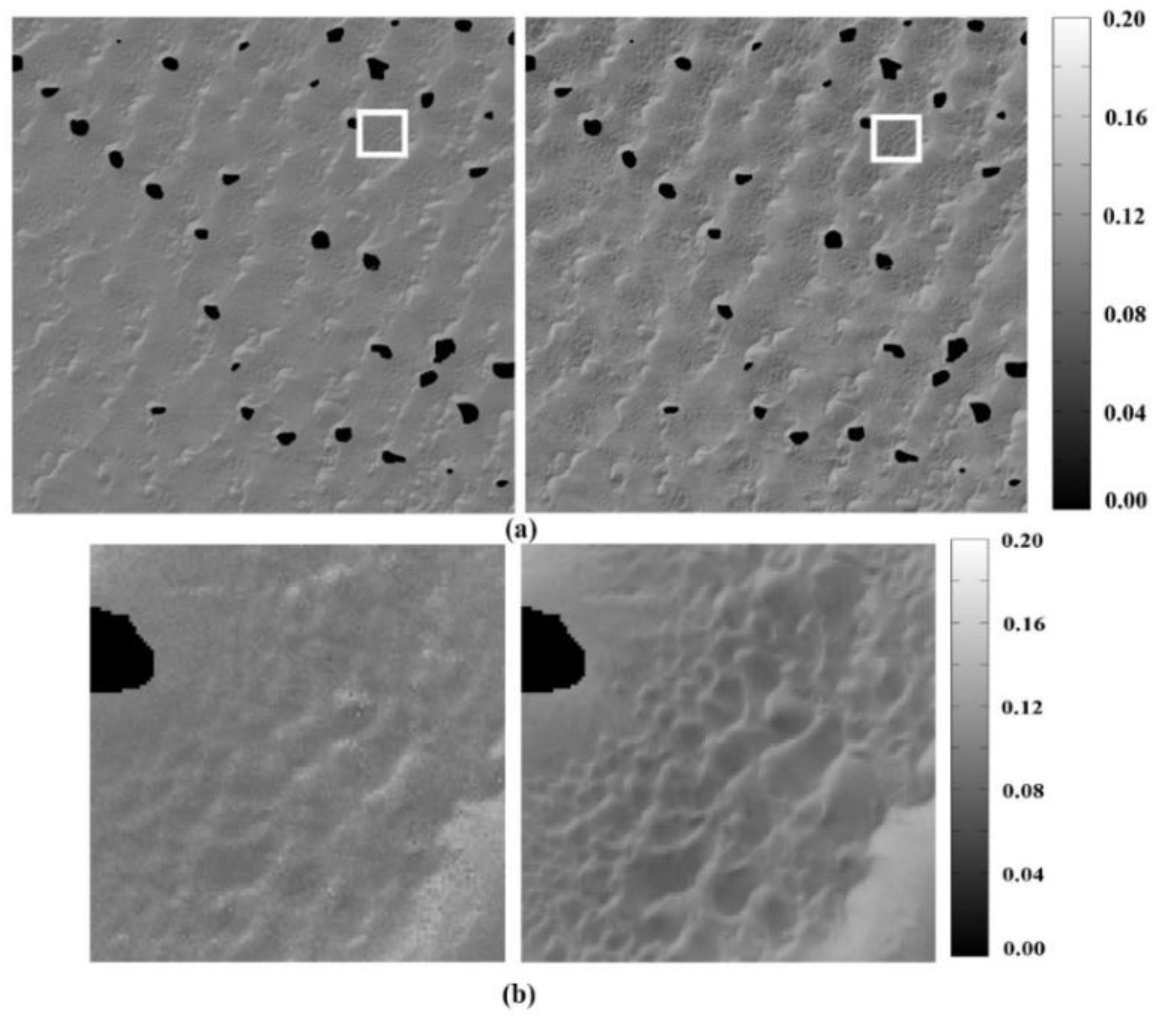
To verify the improvement of the fitted BRDF, we compare the surface reflectance simulated by the LUT established with the Landsat-8/OLI and DEM extracted by the ZY-3/TLC (new LUT) with that simulated by the LUT established with the Landsat-7/ETM+ and the ASTER GDEM (old LUT).
Figure 8 shows a comparison example of the two types of surface reflectance for the GF-1/WFV1 image on 19 March 2014.
Figure 8.
Comparison of the simulated surface reflectance at the blue band on 19March 2014 using the old LUT (left) and using the new LUT (right). (a) Broad view of the simulated surface reflectance and (b) close view of the highlighted area.
Figure 8.
Comparison of the simulated surface reflectance at the blue band on 19March 2014 using the old LUT (left) and using the new LUT (right). (a) Broad view of the simulated surface reflectance and (b) close view of the highlighted area.
3.3. TOA Radiance Simulation and Calibration Coefficient Calculation
To simulate the TOA radiance of the GF-1/WFV images, the AOD needs to be retrieved in addition to the surface reflectance of each image. An updated retrieval algorithm by Liang
et al. [
37] and Zhong
et al. [
38] is introduced. The algorithm takes full advantage of MODIS’ multi-temporal observation capability, and its central idea is to detect the “clearest” observation during a multi-temporal window for each pixel. Therefore, only if the AODs for the “clearest” observations are known can the AODs of other “hazy” observations be interpolated from the surface reflectance of the “clearest” observations. The algorithm primarily contains the following steps:
- (1)
Prepare MODIS multi-temporal images and complete the data pre-processing. The MODIS data are downloaded covering the calibration site from
http://ladsweb.nascom.nasa.gov. Data pre-processing includes projection transform, subset and calibration. Then, time series MODIS TOA radiance images are prepared.
- (2)
Determine the AOD for the “clearest” day. The AOD for the “clearest” day is determined through
Table 3, which is calculated by the aforementioned DO method using OLI imagery.
- (3)
Detect the “clearest” pixel. The long time-series images of MODIS are sorted by visual interpretation, and the “clearest” observations are selected during the temporal window for every 10° in the view zenith angles from 0° to 50° (0–10, 11–20, 21–30, 31–40 and 41–50). The images with a view zenith angle larger than 50° are not used in this study because the observation changes when the view zenith angle is larger than 50°.
- (4)
Retrieve the surface reflectance of the “clearest” pixels: The surface reflectance of the “clearest” pixels can be retrieved by establishing a lookup table using the 6S model [
32] because the AOD for the “clearest” pixels is known.
- (5)
Fit the site’s BRDF. To better fit the BRDF characterization of the desert calibration site, the Staylor-Suttles BRDF model [
39] is used, and the coefficients of the model are calculated using the calculated surface reflectance, the solar illuminations and view geometries of the “clearest” pixels. The Staylor-Suttles model is described as
where
c1, c2, c3 and
N are free parameters or coefficients of the model that need to be fitted, μ
i=cosθ
i, μ
v=cosθ
v, θ
i is the solar zenith, θ
v is the view zenith, and
ϕ is the relative azimuth.
- (6)
Retrieve the surface reflectance of all pixels. The surface reflectance of the “hazy” pixels can be calculated using the Staylor-Suttles BRDF model because the coefficients of the model are known. Then, the surface reflectance of all pixels can be retrieved.
- (7)
Retrieve the AOD. The MODTRAN radiative transfer code [
40] is used to retrieve the AOD of the MODIS imagery. A set of parameters needs to be set up as the MODTRAN model inputs including atmospheric model, aerosol model, surface reflectance, VIS, atmospheric water vapour content, solar zenith, view zenith, relative azimuth and TOA radiance. Every input combination corresponds to one AOD value as output.
With the above procedure, the AOD of any MODIS image can be retrieved. Because the calibration is stable, given any GF-1/WFV image, its AOD can be calculated by the corresponding MODIS image with the same transit date as the GF-1/WFV image, although the two images may have a slightly different transit time. The retrieved AODs of all selected images of the GF-1/WFV are listed in
Table 9.
Table 9.
Retrieved AOD for GF-1/WFV imagery.
Table 9.
Retrieved AOD for GF-1/WFV imagery.
| Sensor | Acquisition Time (YYYY.MM.DD) | AOD (550 nm) |
|---|
| GF1/WFV1 | 2013.11.29 | 0.0574 |
| 2013.12.03 | 0.1078 |
| 2014.03.19 | 0.0561 |
| 2014.08.30 | 0.3339 |
| GF1/WFV2 | 2014.01.21 | 0.0558 |
| 2014.09.28 | 0.0833 |
| GF1/WFV3 | 2014.02.11 | 0.0645 |
| 2014.10.23 | 0.0558 |
| GF1/WFV4 | 2013.08.09 | 0.2251 |
| 2013.11.18 | 0.0882 |
| 2013.11.26 | 0.0994 |
| 2014.01.18 | 0.1664 |
| 2014.01.26 | 0.0883 |
| 2014.11.13 | 0.0568 |
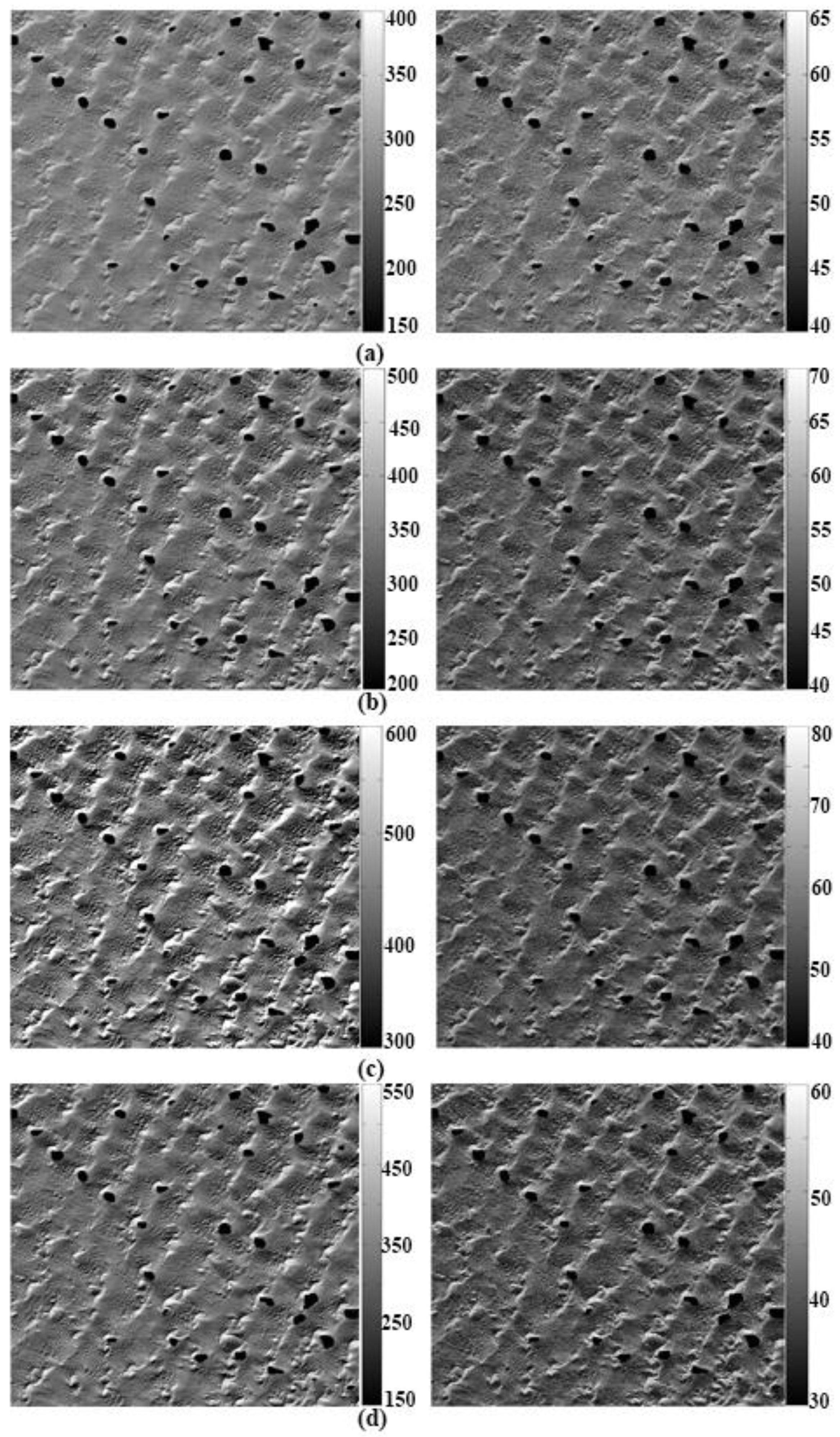
With the derived GF-1/WFV surface reflectance and the AOD retrieved by MODIS imagery, the TOA radiance of the GF-1/WFV can be calculated using the 6S model. The mean TOA radiance and DN for every GF-1/WFV image are listed in
Table 10. An example of the simulated TOA radiance and its corresponding
for the GF-1/WFV image on 25 April 2013 is shown in
Figure 9.
Table 10.
Mean TOA radiance and DN for every GF-1/WFV image.
Table 10.
Mean TOA radiance and DN for every GF-1/WFV image.
| Sensor | Date (YYYY.MM.DD) | Band 1 | Band 2 | Band 3 | Band 4 |
|---|
| DN | TOA | DN | TOA | DN | TOA | DN | TOA |
|---|
| GF1/WFV1 | 2013.11.29 | 286.37 | 52.84 | 338.09 | 50.76 | 426.49 | 54.05 | 309.02 | 41.86 |
| 2013.12.03 | 276.98 | 53.09 | 328.47 | 50.35 | 418.38 | 52.71 | 306.75 | 40.54 |
| 2014.03.19 | 416.55 | 74.00 | 513.40 | 75.07 | 662.84 | 89.98 | 476.86 | 65.25 |
| 2014.08.30 | 438.81 | 87.02 | 548.11 | 88.48 | 714.68 | 95.42 | 498.47 | 74.05 |
| GF1/WFV2 | 2014.01.21 | 275.05 | 51.24 | 335.62 | 50.87 | 437.26 | 53.53 | 321.29 | 40.43 |
| 2014.09.28 | 393.90 | 66.80 | 504.41 | 71.86 | 652.25 | 81.79 | 456.83 | 63.83 |
| GF1/WFV3 | 2014.02.11 | 323.60 | 57.75 | 367.65 | 63.85 | 460.96 | 70.20 | 354.98 | 56.16 |
| 2014.10.23 | 331.13 | 63.06 | 385.90 | 68.16 | 491.87 | 72.75 | 372.63 | 57.42 |
| GF1/WFV4 | 2013.08.09 | 439.24 | 89.20 | 522.10 | 99.83 | 647.38 | 117.70 | 494.37 | 89.93 |
| 2013.11.18 | 312.47 | 59.26 | 346.12 | 64.86 | 415.75 | 72.39 | 327.41 | 57.74 |
| 2013.11.26 | 283.80 | 50.05 | 313.88 | 61.69 | 383.11 | 68.57 | 301.64 | 54.62 |
| 2014.01.18 | 312.47 | 58.41 | 346.12 | 62.77 | 415.75 | 69.02 | 327.41 | 54.98 |
| 2014.01.26 | 296.12 | 59.69 | 327.65 | 65.64 | 399.93 | 73.73 | 321.66 | 58.96 |
| 2014.11.13 | 321.17 | 60.55 | 360.54 | 66.78 | 433.87 | 74.95 | 347.77 | 59.79 |
The calibration coefficients for the GF-1/WFV can be calculated using
where
L is the TOA radiance,
g is the gain,
b is the offset,
DN is the digital reading of the imagery. The unit for
L and b is
.
In this paper, parameter
L is simulated, parameter
b can be used prelaunch to offset (0 for each band), and the parameter
DN can be read from the GF-1/WFV image. Then, the parameters of every scene are calculated. The results are shown in
Table 11.
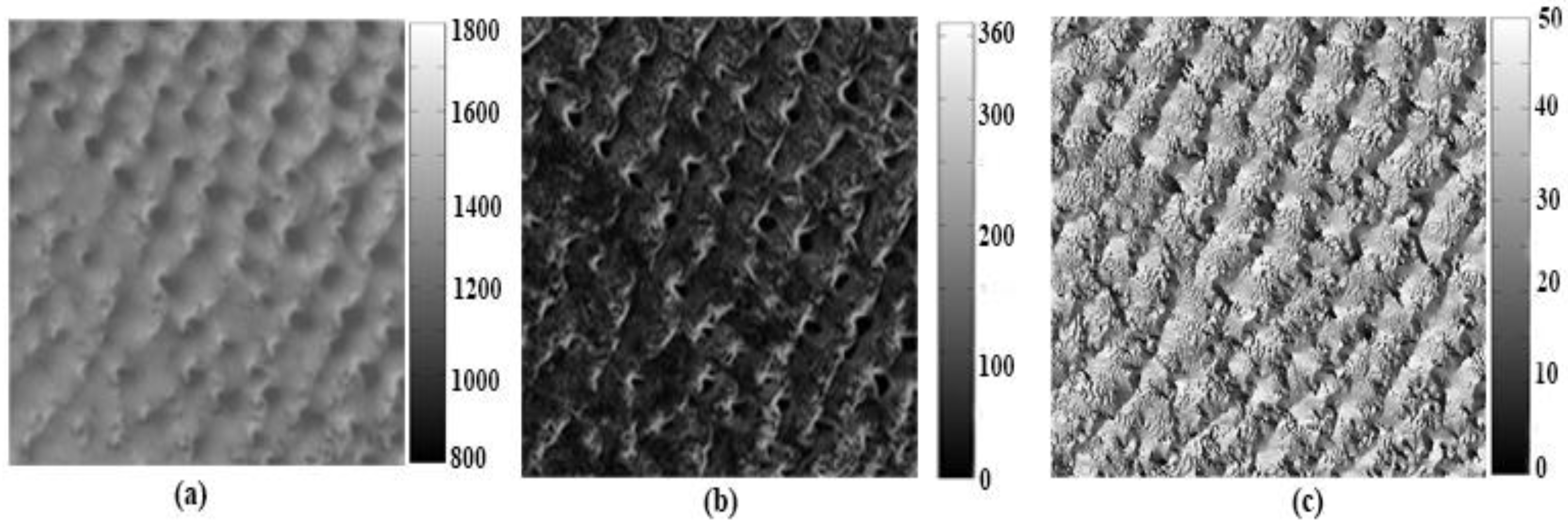
Figure 9.
Example of the simulated TOA radiance and its corresponding DN of GF-1/WFV image on 11 February 2014. (a) Simulated TOA (right) and DN (left) of band 1. (b) Simulated TOA (right) and DN (left) of band 2. (c) Simulated TOA (right) and DN (left) of band 3. (d) Simulated TOA (right) and DN (left) of band 4.
Figure 9.
Example of the simulated TOA radiance and its corresponding DN of GF-1/WFV image on 11 February 2014. (a) Simulated TOA (right) and DN (left) of band 1. (b) Simulated TOA (right) and DN (left) of band 2. (c) Simulated TOA (right) and DN (left) of band 3. (d) Simulated TOA (right) and DN (left) of band 4.
Table 11.
Calibration coefficients for GF-1/WFV.
Table 11.
Calibration coefficients for GF-1/WFV.
| Sensor | Band 1 | Band 2 | Band 3 | Band 4 |
|---|
| GF1/WFV1 | Gain | Bias | Gain | Bias | Gain | Bias | Gain | Bias |
|---|
| 20131129 | 0.1765 | 0.000 | 0.1465 | 0.000 | 0.1234 | 0.000 | 0.1320 | 0.000 |
| 20131203 | 0.1829 | 0.000 | 0.1491 | 0.000 | 0.1224 | 0.000 | 0.1289 | 0.000 |
| 20140319 | 0.1693 | 0.000 | 0.1432 | 0.000 | 0.1233 | 0.000 | 0.1347 | 0.000 |
| 20140830 | 0.1901 | 0.000 | 0.1571 | 0.000 | 0.1314 | 0.000 | 0.1474 | 0.000 |
| Mean | 0.1797 | 0.000 | 0.1490 | 0.000 | 0.1251 | 0.000 | 0.1358 | 0.000 |
| Sensor | Band 1 | Band 2 | Band 3 | Band 4 |
| GF1/WFV2 | Gain | Bias | Gain | Bias | Gain | Bias | Gain | Bias |
| 20140121 | 0.1734 | 0.000 | 0.1463 | 0.000 | 0.1197 | 0.000 | 0.1257 | 0.000 |
| 20140928 | 0.1679 | 0.000 | 0.1424 | 0.000 | 0.1213 | 0.000 | 0.1352 | 0.000 |
| Mean | 0.1707 | 0.000 | 0.1444 | 0.000 | 0.1205 | 0.000 | 0.1304 | 0.000 |
| Sensor | Band 1 | Band 2 | Band 3 | Band 4 |
| GF1/WFV3 | Gain | Bias | Gain | Bias | Gain | Bias | Gain | Bias |
| 20140211 | 0.1675 | 0.000 | 0.1631 | 0.000 | 0.1400 | 0.000 | 0.1464 | 0.000 |
| 20141023 | 0.1739 | 0.000 | 0.1668 | 0.000 | 0.1415 | 0.000 | 0.1500 | 0.000 |
| Mean | 0.1707 | 0.000 | 0.1649 | 0.000 | 0.1407 | 0.000 | 0.1482 | 0.000 |
| Sensor | Band 1 | Band 2 | Band 3 | Band 4 |
| GF1/WFV4 | Gain | Bias | Gain | Bias | Gain | Bias | Gain | Bias |
| 20130809 | 0.1965 | 0.000 | 0.1928 | 0.000 | 0.1746 | 0.000 | 0.1828 | 0.000 |
| 20131118 | 0.1740 | 0.000 | 0.1708 | 0.000 | 0.1555 | 0.000 | 0.1568 | 0.000 |
| 20131126 | 0.1850 | 0.000 | 0.1795 | 0.000 | 0.1600 | 0.000 | 0.1611 | 0.000 |
| 20140118 | 0.1728 | 0.000 | 0.1661 | 0.000 | 0.1486 | 0.000 | 0.1494 | 0.000 |
| 20140126 | 0.1847 | 0.000 | 0.1822 | 0.000 | 0.1642 | 0.000 | 0.1624 | 0.000 |
| 20141113 | 0.1724 | 0.000 | 0.1687 | 0.000 | 0.1545 | 0.000 | 0.1533 | 0.000 |
| Mean | 0.1809 | 0.000 | 0.1767 | 0.000 | 0.1596 | 0.000 | 0.1610 | 0.000 |
3.4. Verification of the Updated Calibration Method Using the GF-1/WFV Data
The calibration coefficients in this paper are slightly different from those published by CRESDA, so further verification is needed. Generally speaking, the Working Group on Calibration and Validation of the Committee on Earth Observation Satellites always take ground measurements of land-surface spectra and atmospheric parameters at the Dunhuang test site, which can be used to verify cross-calibrated results as actual data. The Dunhuang test site, located in Gansu Province, China, is one of the China Radiometric Calibration Sites for the vicarious calibration of Chinese space-borne sensors. The site is spatially uniform, with a coefficient of variation less than 2% of the spectral reflectance over the 10 km-by-10 km central region [
8]. Unfortunately, synchronized ground-measurement data are not retrieved, so the OLI images covering the Dunhuang test site are used as reference data for validation. The procedure is carried out as follows:
- (1)
Choose image pairs of the GF-1/WFVs and the Landsat-8/OLI with a similar transit time at the Dunhuang test site. Information on the chosen image pairs is listed in
Table 12.
- (2)
Calculate the TOA reflectance of these GF-1/WFVs images using the calibration coefficients given by CRESDA. The TOA radiance of the GF-1/WFV can be calculated using Equation (5), and the TOA reflectance of the GF-1/WFV can be calculated using Equation (6).
where
is the TOA reflectance;
is the TOA radiance;
d is the distance of the earth; θ
SE is the solar elevation; and
ESUNλ is the solar irradiance at the top of atmosphere, listed in
Table 13.
Table 12.
Information of the chosen image pairs of GF-1/WFVs and Landsat-8/OLI.
Table 12.
Information of the chosen image pairs of GF-1/WFVs and Landsat-8/OLI.
| Sensor | Acquiring Date of GF-1/WFVs (YYYYMMDD) | Acquiring Date of OLI (YYYYMMDD) | Solar Zenith of GF-1/WFVs (°) | Solar Zenith of OLI (°) | View Zenith of GF-1/WFVs (°) | View Zenith of OLI (°) | Relative Azimuth of GF-1/WFVs (°) | Relative Azimuth of OLI (°) |
|---|
| WFV1 | 20140312 | 20140314 | 46.0999 | 47.2203 | 26.6714 | 0.0000 | 53.1060 | 149.3809 |
| WFV2 | 20140815 | 20140812 | 27.6772 | 31.1131 | 8.8375 | 0.0000 | 48.3420 | 137.9205 |
| WFV3 | 20140212 | 20140217 | 55.9372 | 56.3834 | 8.7908 | 0.0000 | 120.5010 | 152.6038 |
| WFV4 | 20140111 | 20140116 | 65.5926 | 64.4100 | 32.8268 | 0.0000 | 116.1370 | 157.3043 |
Table 13.
Solar irradiance at the top of atmosphere of GF-1/WFVs.
Table 13.
Solar irradiance at the top of atmosphere of GF-1/WFVs.
| Sensor | Band | ESUNλ |
|---|
| WFV1 | 1 | 1969.7 |
| 2 | 1859.7 |
| 3 | 1560.1 |
| 4 | 1078.1 |
| WFV2 | 1 | 1957.3 |
| 2 | 1857.6 |
| 3 | 1560.1 |
| 4 | 1079.3 |
| WFV3 | 1 | 1960.1 |
| 2 | 1854.2 |
| 3 | 1557.1 |
| 4 | 1080.7 |
| WFV4 | 1 | 1969.2 |
| 2 | 1855.7 |
| 3 | 1557.7 |
| 4 | 1078.0 |
- (3)
Calculate the TOA reflectance of the GF-1/WFVs images using the calibration coefficients retrieved in this paper. The TOA reflectance of the GF-1/WFV can be calculated using Equations (5) and (6).
- (4)
Calculate the TOA reflectance of these OLI images using the given calibration coefficients. The TOA reflectance of OLI can be calculated using [
17]
where ρ
λ is the TOA reflectance;
Mρ is the band-specific multiplicative rescaling factor from the metadata (REFLECTANCE_MULT_BAND_X, where X is the band number);
Aρ is the band-specific additive rescaling factor from the metadata (REFLECTANCE_ADD_BAND_X, where X is the band number);
Qcal is the quantized and calibrated standard product pixel values (
DN); and θ
SE is solar elevation.
- (5)
Compare the three sets of TOA reflectance. The comparison results are listed in
Table 14.
Compared with the TOA reflectance from synchronized OLI images, all errors of the TOA reflectance calculated using the calibration coefficients in this paper are less than 5%, and more than half of those are less than 3%, much less than that calculated with the calibration coefficients given by CRESDA, whose error could reach 20%. Consequently, the calibration coefficients retrieved in this paper have high accuracy, and the cross-calibration method performs excellently for the GF-1/WFVs. Therefore, the updated cross-calibration method performs very well for different GF-1/WFV cameras. Compared with the given calibration coefficients provided once every year, the updated cross-calibration method can provide as many calibration coefficients as possible only if there is GF-1/WFV imagery at the Badan Jaran Desert calibration site without cloud contamination. The updated cross-calibration method can be made a routine procedure for cross-calibrating GF-1/WFVs.
Table 14.
GF-1/WFV cross-calibration validation results.
Table 14.
GF-1/WFV cross-calibration validation results.
| Sensor | Date (YYYYMMDD) | Band | DN | GCC * | CCC $ | TOA reflectance by GCC | TOA reflectance by CCC | TOA reflectance by OLI | Error by GCC (%) | Error by CCC (%) |
|---|
| WFV1 | 20140312 | 1 | 573.9939 | 0.2004 | 0.1693 | 0.2646 | 0.2370 | 0.2295 | 20.52 | 3.26 |
| 2 | 657.9767 | 0.1648 | 0.1432 | 0.2642 | 0.2295 | 0.2279 | 15.94 | 0.74 |
| 3 | 718.4975 | 0.1243 | 0.1233 | 0.2594 | 0.2573 | 0.2556 | 1.47 | 0.66 |
| 4 | 475.5688 | 0.1563 | 0.1347 | 0.3124 | 0.2692 | 0.2773 | 12.67 | 2.90 |
| WFV2 | 20140815 | 1 | 629.9536 | 0.1733 | 0.1679 | 0.1939 | 0.1878 | 0.1944 | 0.29 | 3.40 |
| 2 | 739.1819 | 0.1383 | 0.1424 | 0.1967 | 0.2025 | 0.2050 | 4.06 | 1.21 |
| 3 | 798.6314 | 0.1122 | 0.1213 | 0.2122 | 0.2294 | 0.2283 | 7.07 | 0.47 |
| 4 | 494.6433 | 0.1391 | 0.1352 | 0.2396 | 0.2329 | 0.2434 | 1.53 | 4.30 |
| WFV3 | 20140212 | 1 | 442.7085 | 0.1745 | 0.1675 | 0.2337 | 0.2122 | 0.2173 | 7.54 | 2.35 |
| 2 | 458.7962 | 0.1514 | 0.1631 | 0.1988 | 0.2264 | 0.2196 | 9.48 | 3.09 |
| 3 | 498.3198 | 0.1257 | 0.1400 | 0.2256 | 0.2513 | 0.2467 | 8.53 | 1.87 |
| 4 | 352.0519 | 0.1462 | 0.1464 | 0.2671 | 0.2675 | 0.2702 | 1.12 | 0.99 |
| WFV4 | 20140111 | 1 | 417.5617 | 0.1713 | 0.1724 | 0.2048 | 0.2066 | 0.1983 | 3.29 | 4.20 |
| 2 | 430.0000 | 0.1600 | 0.1687 | 0.2008 | 0.2084 | 0.1995 | 3.22 | 4.47 |
| 3 | 436.7456 | 0.1497 | 0.1545 | 0.2255 | 0.2239 | 0.2148 | 4.98 | 4.20 |
| 4 | 311.8841 | 0.1435 | 0.1533 | 0.2269 | 0.2362 | 0.2325 | 2.41 | 1.60 |






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








