5.1. 1-Week Continuous Surface Currents Measurements (8–15 October 2018)
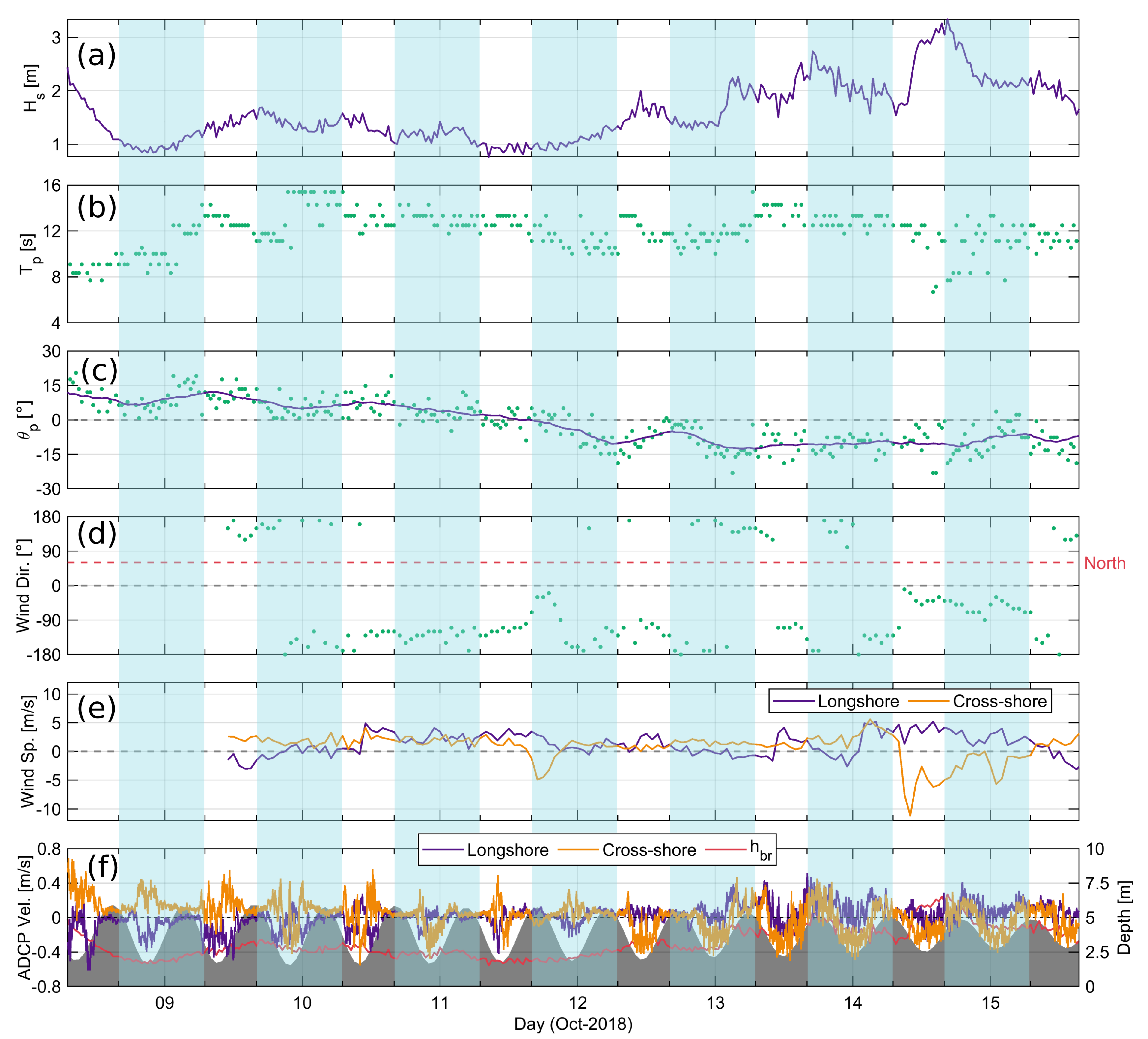
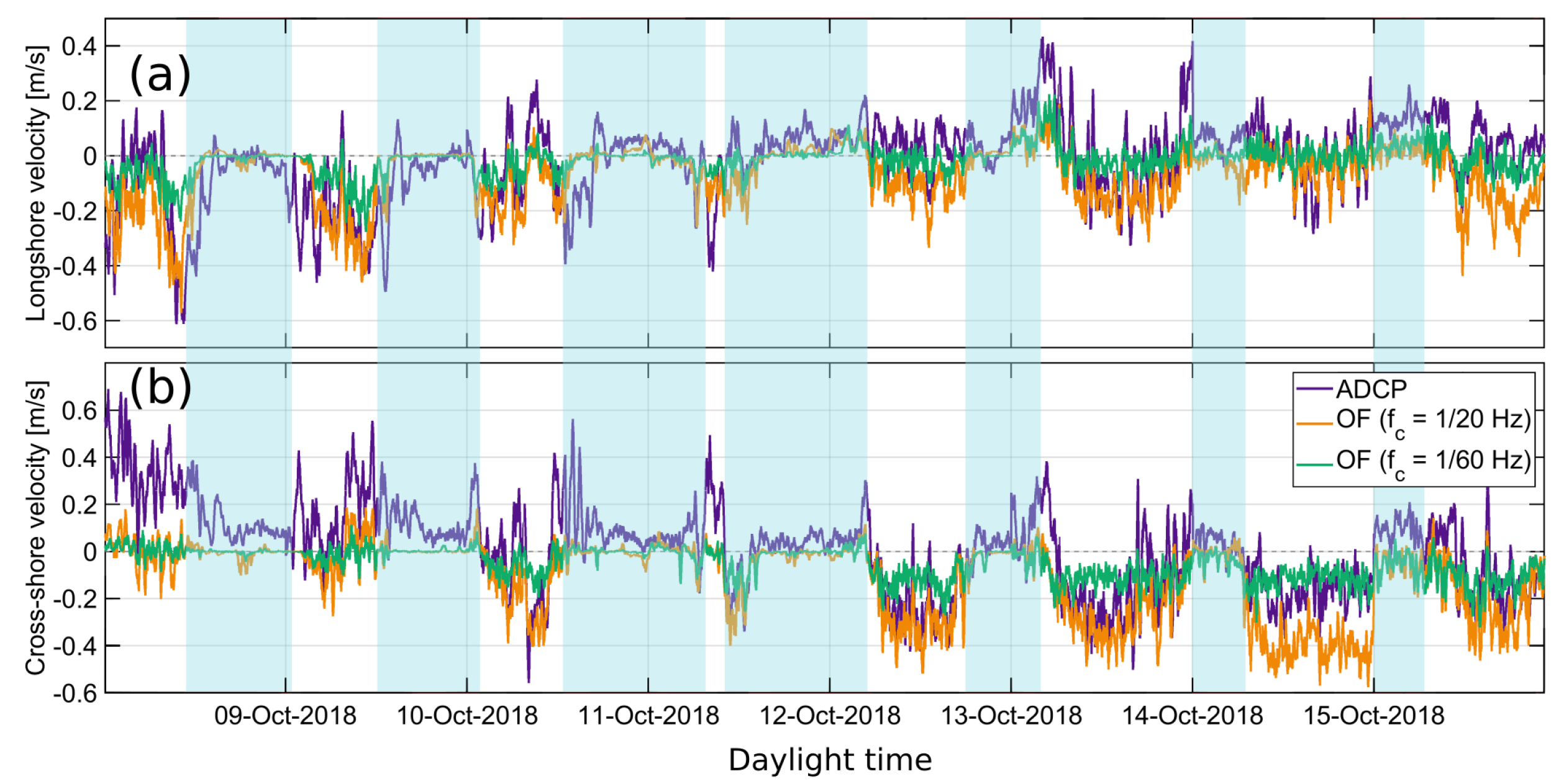
Figure 5 shows the 5-min time-averaged surface velocity components time series corresponding to 1-week of daylight measurements. For the longshore surface velocity component (
Figure 5a), the optical flow derived-velocities recreate fairly well the slow fluctuations found in ADCP surface measurements. However, northward-directed currents (positive longshore velocity values) appear to be slightly underestimated. Regarding the cross-shore component (
Figure 5b), onshore-directed currents overall match well between optical flow and ADCP, while offshore-directed velocities are less in agreement. This underestimation will be discussed in
Section 6. In general, the optical flow velocities obtained using low-pass filtered images with
Hz and
Hz are similar in pattern. However, OF (
Hz) present a smaller amplitude (i.e., smaller velocities values) with respect to OF (
Hz). It is important to note that near-zero optical flow values correspond to the time of high tide water elevation with
m when no wave breaking was present over the reef and no foam was available for tracking close to the ADCP location (see
Figure 2f; blue shaded regions in
Figure 5).
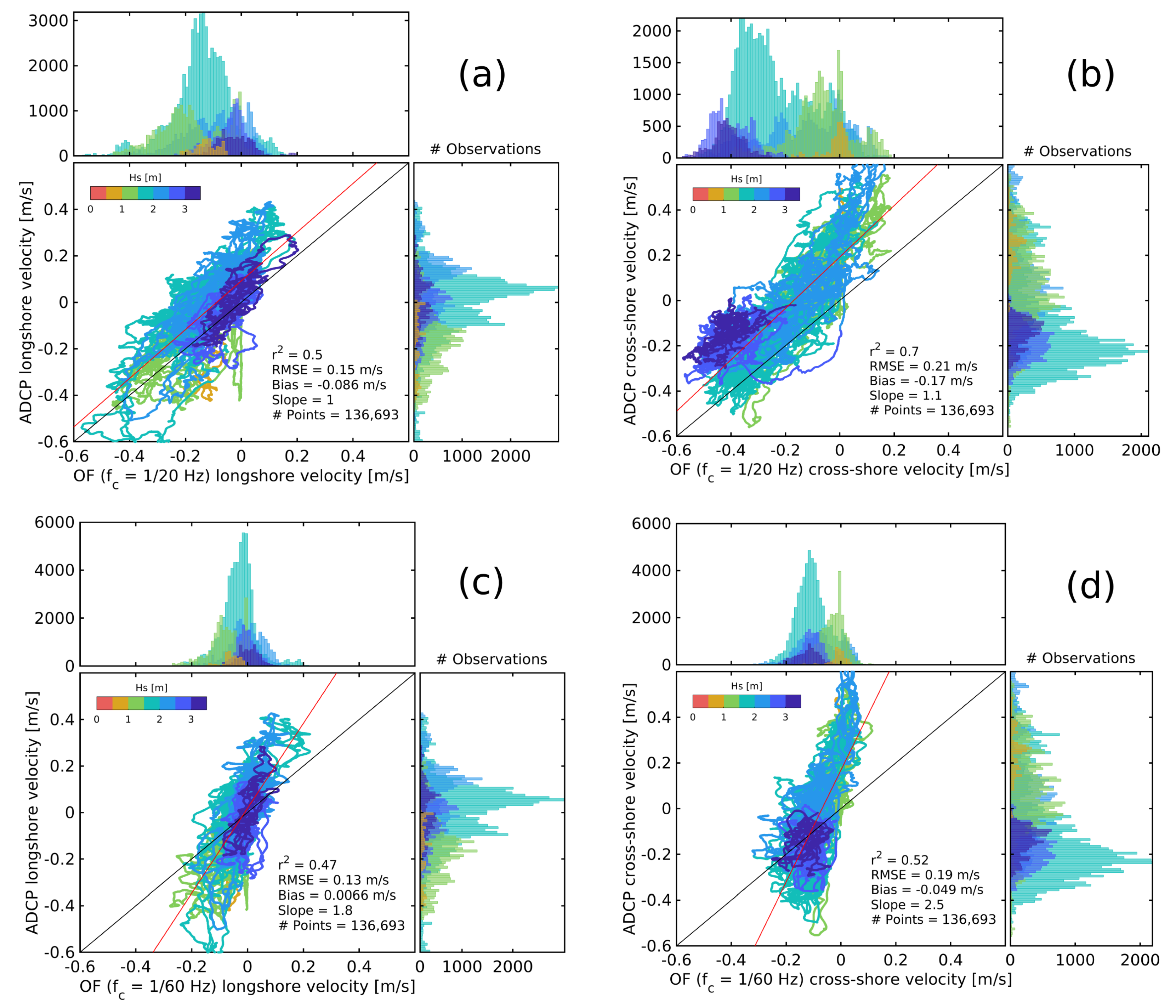
Figure 6 shows the 5-min time-averaged ADCP and optical flow surface velocity components of
Figure 5 as a comparison under different ranges of significant wave height
. Surface velocities were grouped into seven
bins of 0.5-m size. The corresponding statistics for each bin are summarized in
Table 2 and
Table 3 and depicted with histograms of different colors in
Figure 6. Around 80% of the velocity data is concentrated between 1 and 2.5 m of
. OF (
Hz) and ADCP surface velocities within this range show a relatively good agreement (
and
m/s). However, the bias and the skewed bivariate histograms indicate a northward- and offshore-directed current underestimation that becomes more evident for
m (
m/s).
Comparison between OF (
Hz) and ADCP surface velocities shows a smaller bias and less dispersion of the data with respect to OF (
Hz). Although
suggests a similar linear agreement (
), optical flow velocities are overall smeared as shown in the histograms of
Figure 6c,d. This is also evidenced by the steeper values of the regression slope (
).
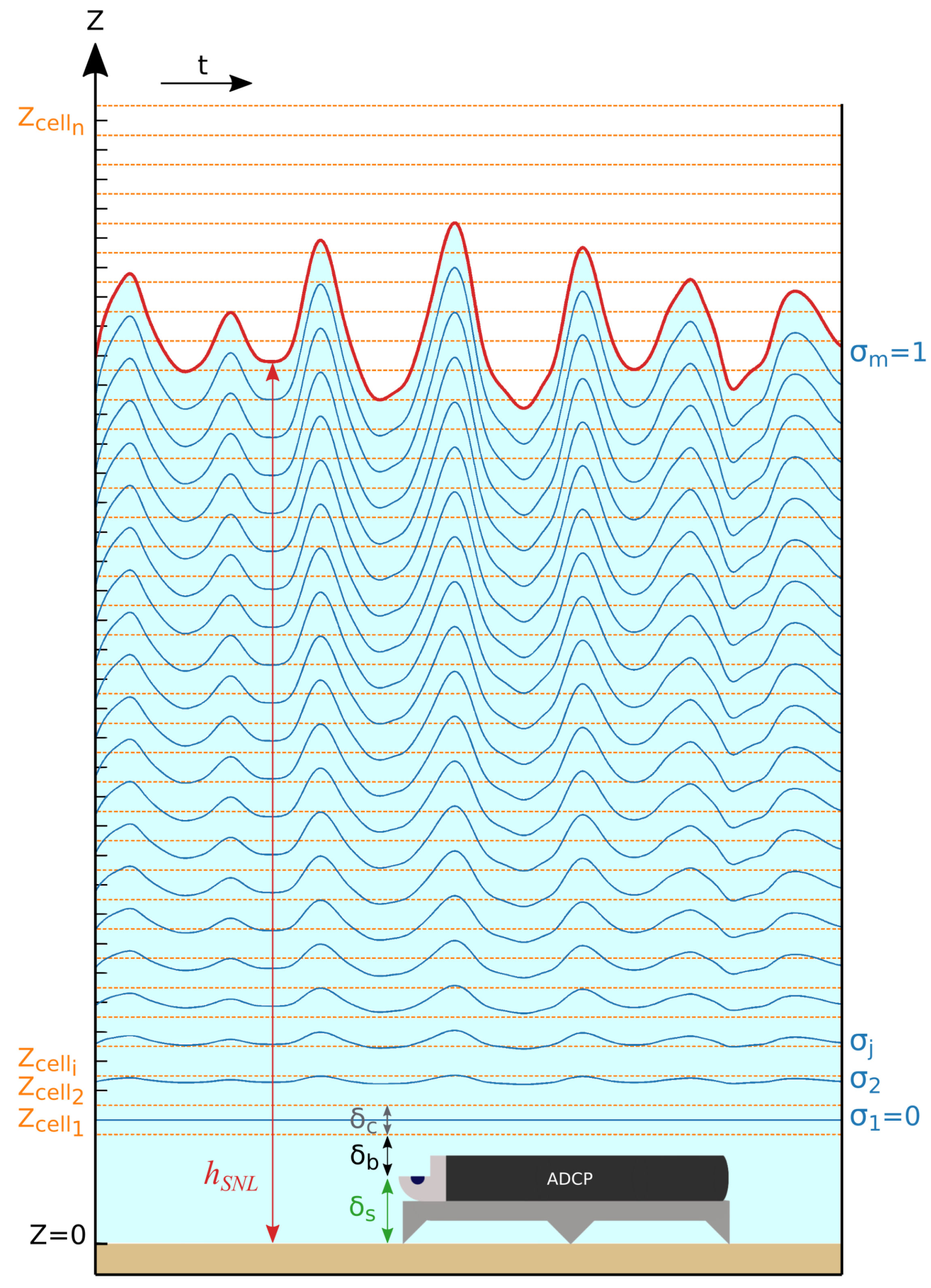
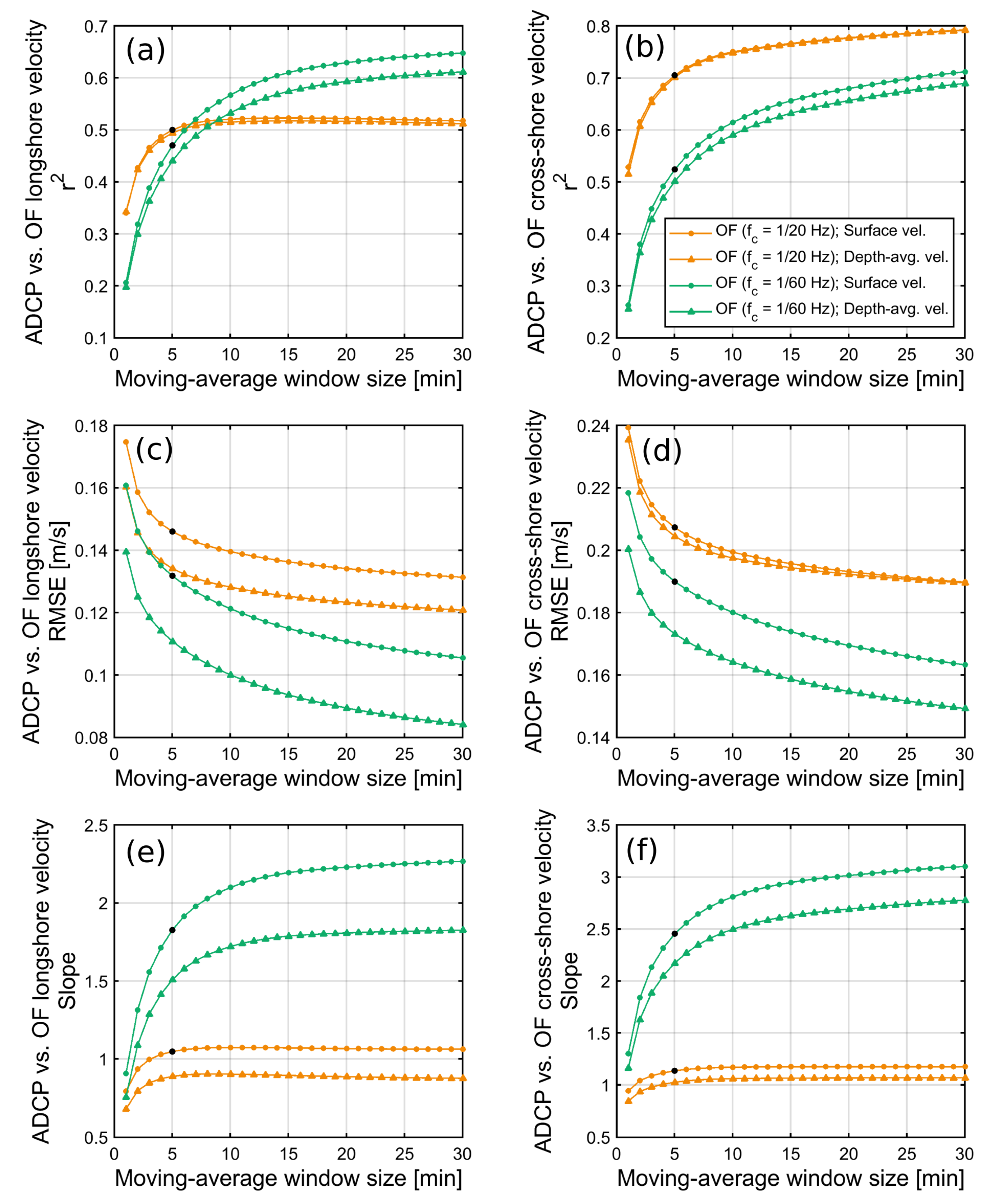
Figure 7 quantifies the agreement between optical flow surface velocity estimates and ADCP measurements. ADCP measurements consisted of surface velocities (average between
,
and
) and depth-averaged velocities (average of all
-layers within the water column). The estimated and measured time series were moving-averaged and compared against different window size selections. Based only on
, the longshore surface velocity component (
Figure 7a) is better reproduced by the optical flow when using low-pass filtered images with
Hz as input. Comparison between OF (
Hz) and ADCP surface velocities, for a window size larger than 10 min, show
values ranging from 0.55 up to 0.65 with associated RMSE between 0.12 and 0.11 m/s. Similarly, OF (
Hz) vs. ADCP depth-averaged velocities exhibit
ranging from 0.5 up to 0.6 with lower RMSE between 0.10 and 0.08 m/s. A fair performance is still found when using low-pass filtered images with
Hz. OF (
Hz) vs. ADCP longshore velocity measurements (surface and depth-averaged velocities) show a consistent agreement (
) for any window size larger than 5 min, although RMSE values are relatively lower when compared against ADCP depth-averaged velocities (RMSE between 0.12 and 0.13) than with surface velocities (RMSE between 0.13 and 0.14). By contrast, ADCP cross-shore surface and depth-averaged velocities are better correlated with OF (
Hz) than with OF (
Hz) velocity estimates. For a window size larger than 5 min,
values vary between 0.7–0.8 and 0.5–0.7, respectively (
Figure 7b). OF (
Hz) vs. ADCP cross-shore velocity RMSE decreases from 0.21 to 0.19 m/s as the window size increases from 5 to 30 min regardless if the optical flow estimates are compared against surface or depth-averaged ADCP velocities. On the other hand, as the window size increases from 5 to 30 min, OF (
Hz) vs. ADCP cross-shore surface velocity RMSE decreases from 0.13 to 0.12 m/s and OF (
Hz) vs. ADCP cross-shore depth-averaged velocity RMSE decreases from 0.11 to 0.08 m/s. In addition to
and RMSE metrics, it is worth noting the values of the linear regression slope for both velocity components (
Figure 7e,f). Slope values equal to one indicate a correct steepness for the one-to-one linear relationship between optical flow estimates and ADCP measurements. According to the regression slope, OF (
) velocity estimates indeed reproduce better the ADCP measurements for both velocity components with slope values around
. Overall, as the window size is increased, high-frequency noise-related variability (i.e., RMSE) is reduced improving performance metrics (
Figure 7c,d).
The bias has been intentionally omitted in
Figure 7 as it poorly depends on the time-averaging window size. Regardless of the window size selection for the moving-average, the bias remain constant and correspond to the same values previously shown in
Figure 6 and
Table 2 and
Table 3: OF (
Hz) vs. ADCP longshore velocity bias
m/s, OF (
Hz) vs. ADCP cross-shore velocity bias
m/s, OF (
Hz) vs. ADCP longshore velocity bias
m/s and OF (
Hz) vs. ADCP cross-shore velocity bias
m/s. Moreover, the bias does not appear to change with ADCP surface or depth-averaged velocity measurements.
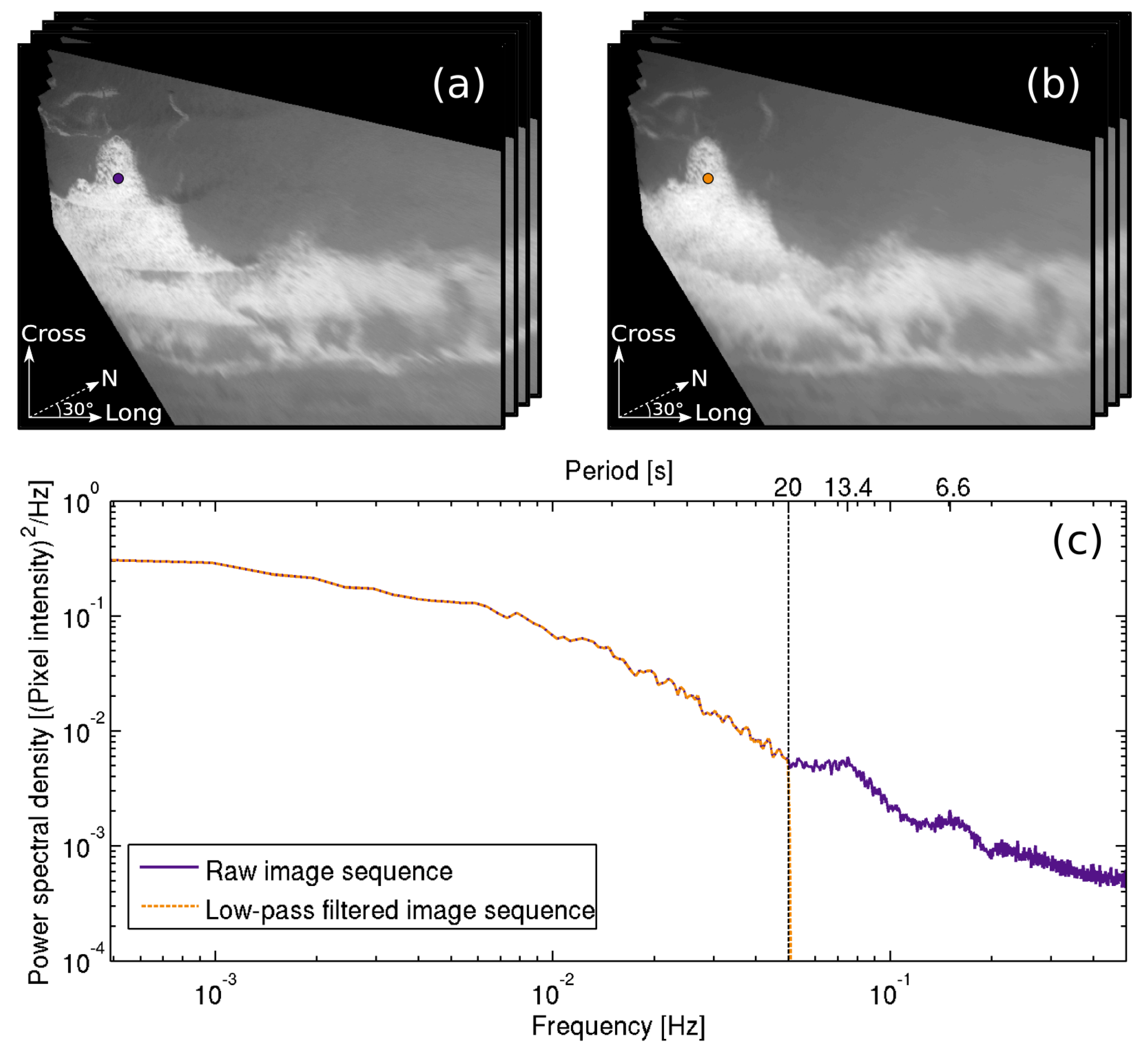
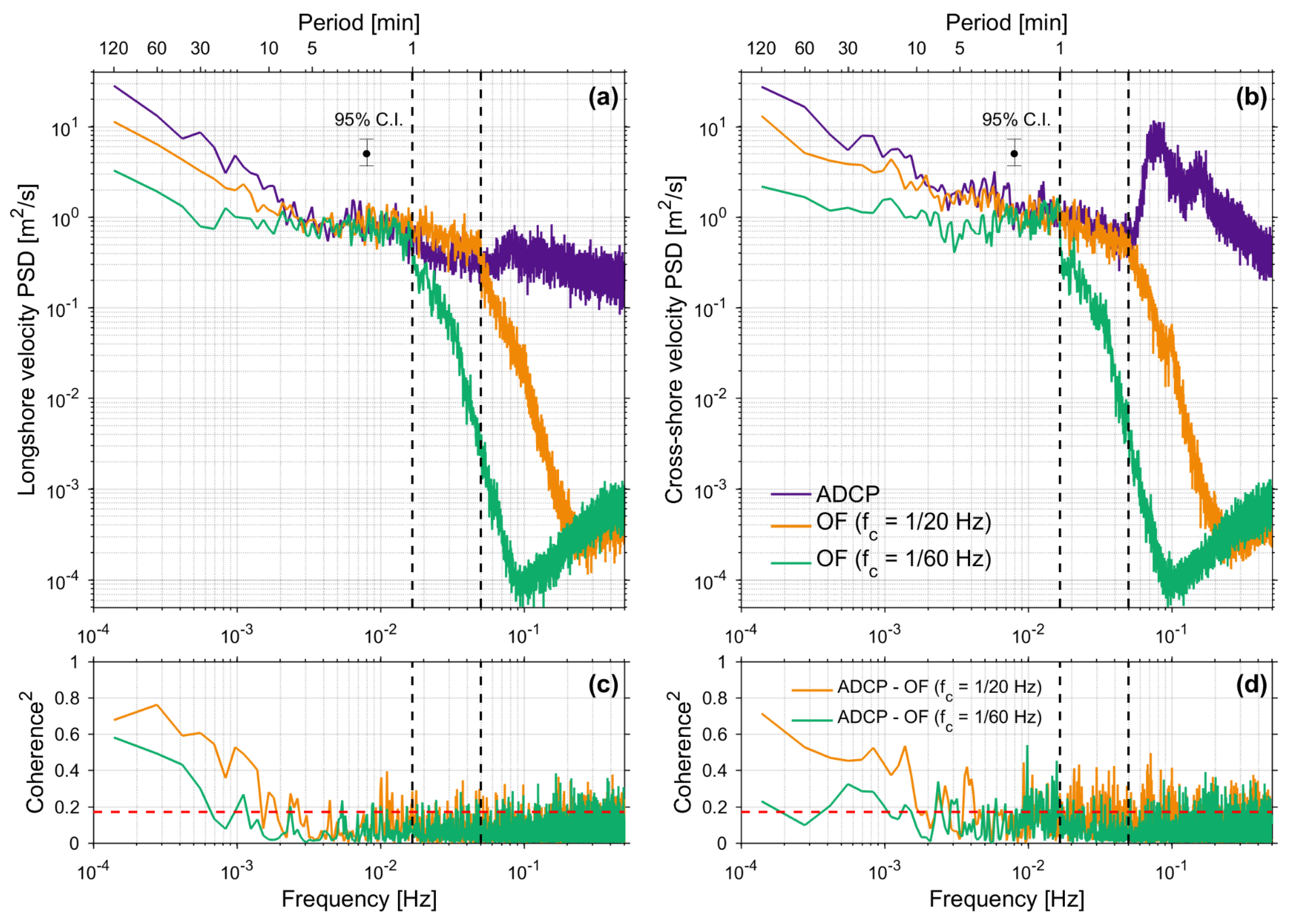
Figure 8 shows the surface velocity PSDs computed over the 17-averaged 2-h segments 1-week time series. The PSDs reveal a variety of signals present in both ADCP and optical flow time series (e.g., infragravity and VLF fluctuations). As expected, the velocity spectral energy associated with the sea-swell frequency band, previously removed from the image sequence, is subsequently attenuated for frequencies higher than the image low-pass filter cutoff-frequency (
Hz and
Hz; black dashed lines). The squared coherence is significant at the 95% confidence level in the infragravity frequency range (0.004–0.04 Hz) with values around 0.4 for the cross-shore velocity component. Nevertheless, the frequency region with the highest coherence (≈0.6) is associated with the VLF band (<0.004 Hz). Overall, the squared coherence shows a better agreement for OF (
Hz) velocities. The low spectral energy found in OF (
Hz) estimates is related to the low amplitude found in the surface velocity time series.
5.2. Drifter Deployments
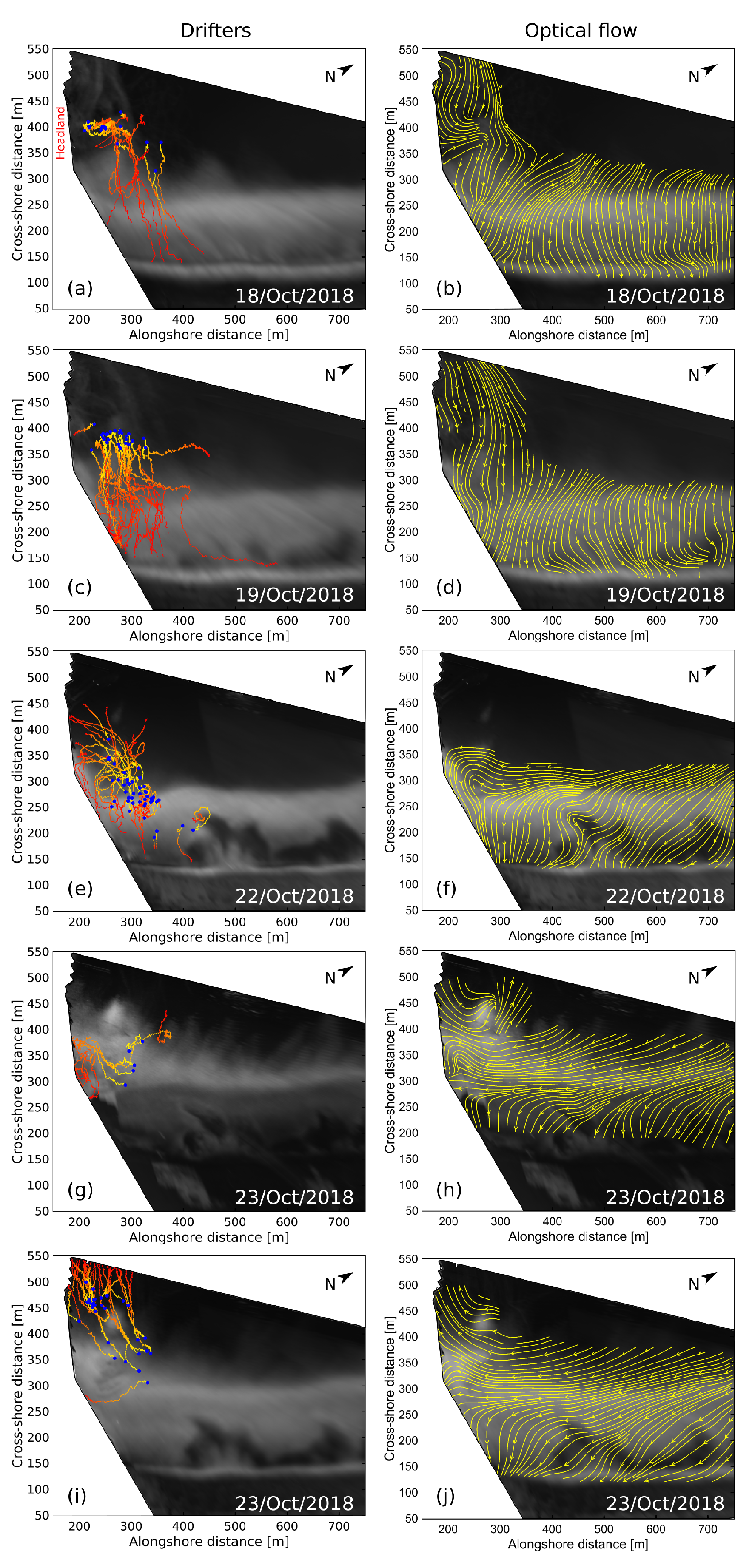
Figure 9 shows drifter tracks on 18, 19, 22 and 23 October 2018 along with corresponding optical flow stream plots under different field conditions (
Table 1). The pixel intensity standard deviation image is also overlaid in each plot to highlight wave breaking spatial variability (e.g., surf zone and reef location) and foam availability during drifter deployment. Days corresponding to 18 and 19 October 2018 (
Figure 9a–d) show evidence of primarily onshore-directed flows. Intermittent traces of foam along the headland made it possible to compute mean optical flow estimates outside the surf zone, although velocities in this region may not be reliable due to a lower number of observations [
22]. This is the main reason why only qualitatively streamlines are shown to represent the mean surface flow.
More complex circulations are described by the drifters on 22 October 2018 (
Figure 9e,f). The presence of a quasi-steady circulation cell at the location of the reef is displayed under a combination of moderate-energy and shore-normal incident waves (
m;
s;
°) around low tide. It is interesting to note the evolution of rip channels inside the surf zone which in turn influences the circulation. Nevertheless, optical flow estimation of the circulation patterns is consistent with the observed drifter tracks.
Figure 9g presents the trajectories of the first set of drifters released around neap low tide on 23 October 2018, whereas
Figure 9i shows the trajectories of the remaining drifters deployed during rising low tide. During low tide (
Figure 9g,h), the wave-induced longshore current is deflected against the headland and affected by wave breaking across the reef resulting in a transient counter-clockwise circulation cell and a deflection rip. As the water level increases (
Figure 9i,j), the reef exerts less control on rip dynamics allowing the dominant longshore current to completely deflect offshore resulting in a fully-developed deflection rip.
Movies were generated for the four days of drifter deployments and are provided as
Supplementary Materials (Video S1, Video S2, Video S3 and Video S4). The movies contain the 2-min time-averaged optical flow velocity field overlapped with drifter trajectories. Overall, optical flow is able to recreate satisfactorily the main circulation patterns described by drifters trajectories reproducing smaller circulation structures with a great spatial resolution. Moreover, results are in agreement with previous studies describing the same events [
40,
44].


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










