Methods for each objective are described as case studies in each of the following sections.
4.2. Wetland Classification and Change Detection
Land cover maps provide users with a bird’s eye view of the various ecotypes present within a region of interest and can include information on wetland type and extent. Depending on the temporal, spatial, and class-level detail required for various management and monitoring efforts, different types of classification approaches may be utilized. For example, products that depict wetland status at the regional scale, required by agencies such as USFWS or ECCC, do not require the level of detail that would be needed for local management of waterfowl habitat within a particular wildlife preservation area. As such, several approaches for generating classified wetland maps are presented in the following sections.
4.2.1. Multi-Sensor, Multi-Temporal Approach
Highly detailed maps are sometimes necessary for monitoring specific wetland plant species, such as the invasive
Phragmites australis and
Typha spp., which have colonized vast expanses of coastal Lake Huron, Lake Erie, and Lake Michigan. Millions of dollars have been spent attempting to control
Phragmites in the Great Lakes region [
48]. Saginaw Bay, located within the state of Michigan, has been especially hard hit, with monotypic stands over one-kilometer-wide stretching along the southern and eastern coasts of the bay. Significant efforts to control the invasive stands with combinations of mowing, burning, and chemical treatment have occurred within the last several years. Remote sensing-based monitoring leveraging the multi-sensor, multi-temporal approach have been implemented with high-resolution imagery available from the WorldView constellation and RADARSAT-2.
The general procedure for creating such maps, outlined in [
15], involves using training data, typically generated by image interpreters using high resolution aerial or satellite images, and validation data, gathered in the field via a stratified random sampling approach, to classify an image stack using the Random Forests classifier [
49]. This method has been utilized for grasslands, boreal peatlands, and tropical alpine peatlands as well [
50,
51,
52] and tends to produce maps with overall accuracy above 85%. Utilization of RADARSAT-2 data, which has approximately 6 cm wavelength as opposed to the 24 cm wavelength of L-band SAR, limits the feasibility of mapping higher biomass woody wetland types because the shorter wavelength of C-band SAR does not have the same ability to penetrate canopy as L-band, though careful selection of incidence angle and image capture date can produce adequate accuracies (see
Section 4.2.3). The limitations in mapping woody wetlands are outweighed by the ability to identify some leading edges of invasive
Phragmites, which can overtake vast coastal wetland complexes in short order.
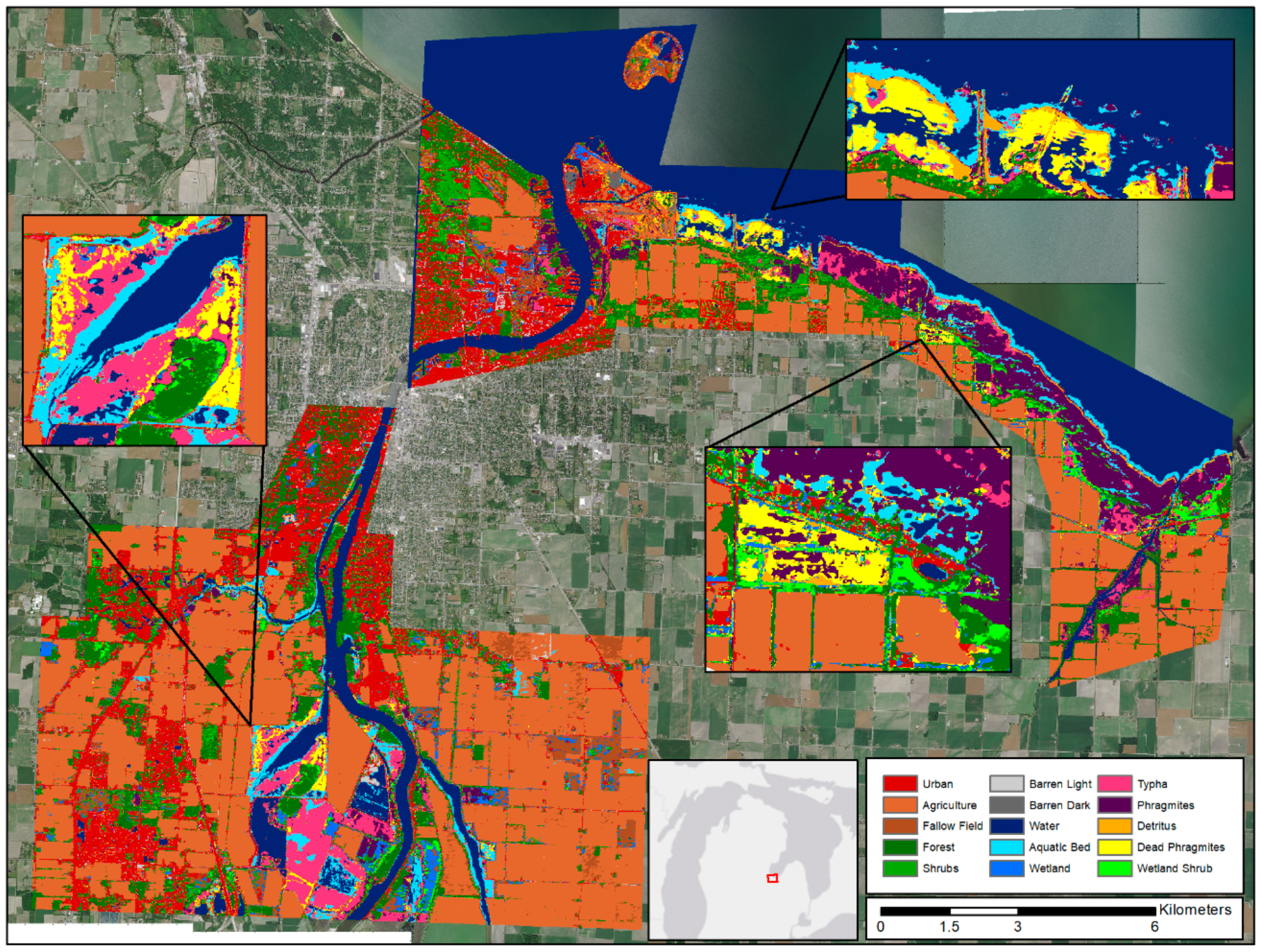
A 2018 classification using a Worldview-2 mosaic and multi-temporal Radarsat-2 imagery was generated for Saginaw Bay, MI. A mosaic of 17 May, 1 July, 14 August, 5 September 2018 Worldview-2 and 31 May, 18 July, 4 September 2018 Radarsat-2 imagery used for classification. RADARSAT-2 images were all collected in FQ10W mode, which provides FP data, were calibrated to sigma naught, speckle filtered using a 5 × 5 boxcar filter, and terrain corrected using PCI Geomatica software. Validation data were collected during several field visits conducted during the summer of 2018, and training data were generated by inspecting the WorldView-2 imagery and digitizing training polygons.
The output map (
Figure 5) has 78% overall accuracy, with high accuracies for targeted wetland classes. Phragmites (PA = 91%, UA = 75%), Dead Phragmites (PA = 81%, UA = 83%), and Typha (PA = 93%, UA = 94%) were all generally accurate, providing a high-resolution, recent baseline map for managers to use to assess the efficacy of various
Phragmites control measures. Significant treatment occurred between 2016 and 2018, so where data was available, maps could be created for both time periods and analyzed for change.
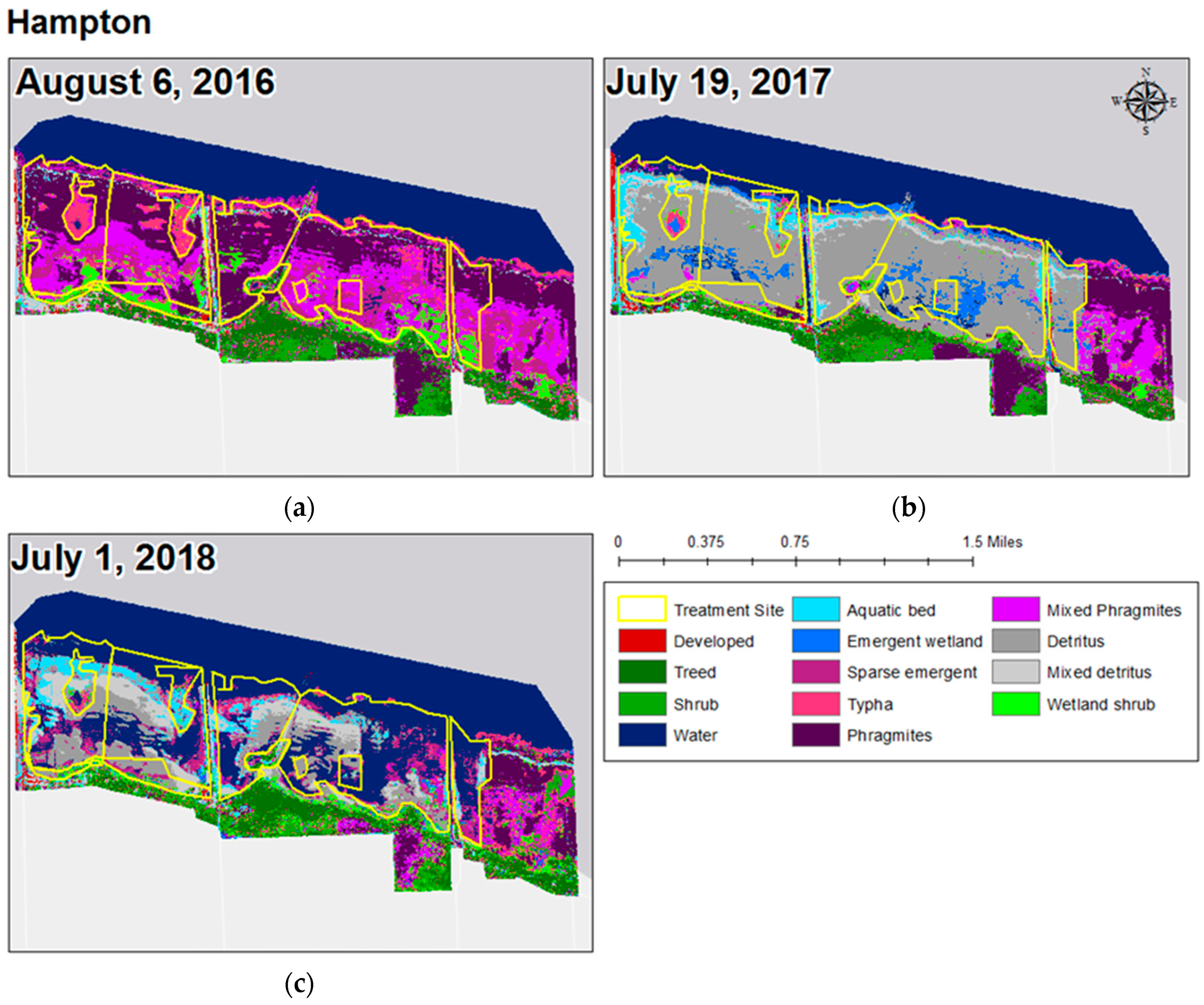
Figure 6 shows an example of the Hampton area in Saginaw Bay. By summer of 2016, the site was infested with
Phragmites, which had taken over native wet meadows and emergent vegetation. The area was treated with a combination of glyphosate and imazapyr in Fall of 2016 and was later partially mowed in the winter of 2017.
These maps were produced from Worldview-2 imagery alone in Random Forests at very high resolution (sub-meter) and are being used by the Saginaw Bay Cooperative Invasive Species Management Area (SB-CISMA) and other stakeholders in applying an adaptive management strategy to the control of invasive
Phragmites. The team cut out the agricultural areas and most non-wetland to produce these maps quickly based on the field data collected in transects within the treatment sites and image interpretation. A total of 11 treatment areas have been monitored using the remote sensing approach described here to augment field visits.
Table 4 shows the results of the remote sensing-based monitoring approach, showing the change in
Phragmites extent for each treatment location.
Treatment efficacy varied from site to site, but the results show an overall decrease of 89% of total infestation area 1–3 years post-treatment. Continued remote sensing-based monitoring will help provide managers with the ability to assess treatment types to develop optimal protocols to limit Phragmites expansion and decrease overall Phragmites coverage.
While the multi-temporal, multi-sensor approach generally produces the most accurate, high-resolution products that can distinguish wetland vegetation at the species level, it is not ideal for all circumstances. The process is time consuming, as it requires significant human input in the form of high-quality training and validation data. The use of multi-temporal data, while helpful for identifying subtle changes in phenology that can differentiate vegetation type, reduces the ability to detect short-term changes. An object-based image analysis (OBIA) approach is being utilized to address some of these limitations.
4.2.2. OBIA Classification Approach
An OBIA approach using expert knowledge and high resolution remotely-sensed data was applied to generate accurate map products of the Great Lakes coastal landscape and to provide a baseline for monitoring changes in these coastal regions. This approach has been used for mapping geomorphic landforms [
53], urban infrastructure [
54], wetlands [
55], and surface waters [
56] and expands on existing wetland and landscape mapping efforts, such as that described in
Section 4.2.1, by leveraging sub-meter resolution stereo pairs acquired by DigitalGlobe/MAXAR and digital surface models (DSM) derived from these images. The DSMs provide height information for separating vegetation into various height strata and communities such as forest and scrub/shrub. Successfully classified image objects contain attributes that label a given feature, e.g., forest, and includes the spatial extent, height, and observation date from the imagery. Wetland and upland vegetation features include detailed attributes for vegetation height, extent, community, and the spatial neighborhood relationship to other land cover features.
The image object attributes based on the imagery bands and spectral indices such as normalized difference vegetation index (NDVI) were used to classify the imagery into water and land features. Water was identified using thresholds on low near-infrared (NIR) values and NDVI. The remaining unclassified areas represent land features; these features were segmented again to separate non-vegetated features using low NDVI values from vegetated features using high NDVI values. The low NDVI values (NDVI < 0) used for identifying non-vegetated features successfully classified urban infrastructure such as roadways, parking structures, buildings, and barren areas such as exposed rock formations. The vegetation class was further refined using the DSM and associated height values to map different vegetation communities.
Stereo-derived DSMs were used in this project to map features based on height values. Stereo image pairs were used to create DSMs for each satellite image pair. The DSMs represent the height of features above WGS84 Ellipsoid. We compared the DSMs to lidar-derived DSMs and discovered a vertical offset between the stereo-derived and lidar-derived DSMs. This vertical offset needed to be accounted for to compare DSMS across different image acquisitions. The vertical offset was constant across the stereo DSM scene but arbitrary in value. To address this issue, we align the stereo-derived DSM results to known ground reference points in the NAVD88 vertical datum. The reference points that were used must be dispersed across each scene and occur in open areas (open fields, along roadways, other open areas). Where lidar data was available, the bare-earth DEM was used to adjust the stereo-derived DSMs to align directly with the lidar DEM. Reference points under closed canopy, near buildings, or near water were removed to avoid misalignment. For areas that did not have lidar data, we used National Geodetic Survey (NGS) points to adjust for the vertical offset. The NGS are well-distributed spatially but less ideal because there are fewer points and many occur on roadways. The adjusted DSMs were normalized prior to being incorporated into the OBIA process.
The DSMs were normalized so that elevation values in the layer represent the height of features relative to the ground. The adjusted DSMs were normalized using lidar-derived DEMs or leaf-off stereo-derived DSMs to produce normalized digital surface models (nDSM). The lidar-derived normalized nDSM was created by subtracting the DSM from the DEM. In areas lacking lidar data, we used adjusted leaf-off DSMs as the DEM to create nDSMs. The leaf-off DSMs were found to closely represent terrain in areas with non-woody stem vegetation or deciduous canopy cover. We used leaf-off DSMs acquired during the same year or within one year of the DSM’s acquisition date to create the nDSMs by subtracting the leaf-on DSM from the leaf-off DSM. The resulting nDSMs were an essential data layer for classifying the vegetation height classes and their associated communities using an OBIA approach.
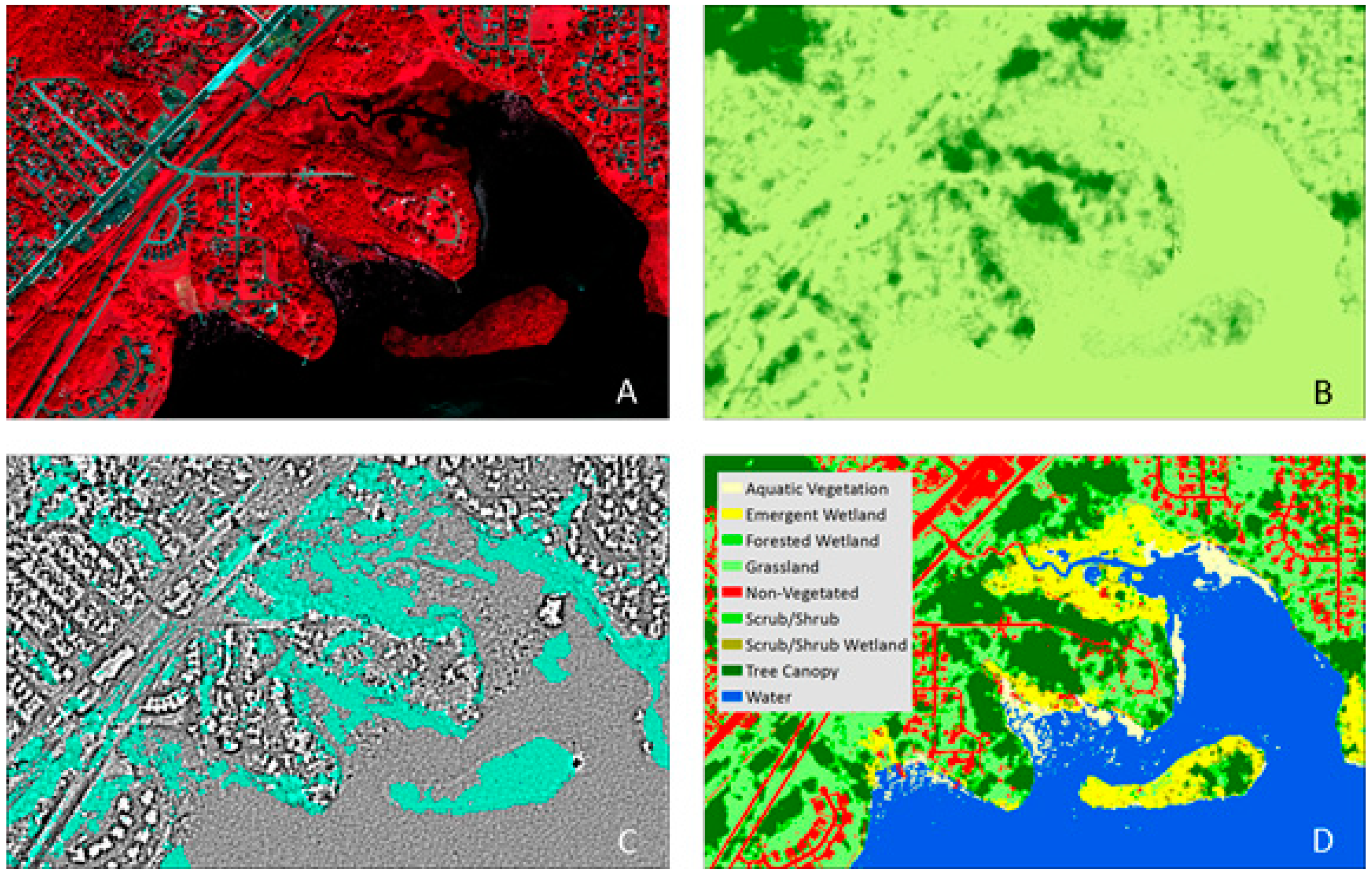
The OBIA approach integrated the imagery and nDSMs to map nine land cover classes: low vegetation, medium vegetation, tall vegetation, water, non-vegetated, aquatic vegetation, and emergent, scrub/shrub, and forested wetland (
Figure 7). The water class was mapped using the optical data and low NIR values (<100). Non-vegetated areas were mapped using low NDVI values (<0) while vegetation classes were mapped using high NDVI values (>0) and height thresholds for low (<2 m), medium (<5 m), and tall (>5 m). These vegetation classes were then used as the basis for mapping wetland classes. Wetland areas within the classification were identified by using a threshold of the topographic position index (TPI). TPI is a layer derived from a DEM that is useful for identifying depressional features (e.g., wetlands). These depressions combined with wetland data mapped by MTRI allowed us to divide the vegetated classes into upland and wetland classes. Low vegetation within a wetland was classified as emergent wetland, medium vegetation was classified as scrub/shrub, and tall vegetation was classified as forested wetland. Aquatic vegetation or floating vegetation was mapped by comparing changes in the land cover classes between different dates of imagery acquisition.
Change detection was performed by comparing the wetland classifications from different dates to produce gain, loss, and no change wetland layers (
Figure 8). The classification was stored as vector polygons with class and extent attributes. The classified image objects from one date were intersected with the classified image objects from a different date. If the class in all or a portion of an image object matches the intersecting class of another image object, the area is reclassified as no change. If the intersecting image object class covers a lower areal extent, it is reclassified as loss while an intersecting image object class with a larger areal extent is reclassified as gain. This comparison enabled us to identify aquatic or floating vegetation by labeling water objects that changed to vegetation objects as aquatic vegetation. We compared the classifications for the Duluth area based on WorldView3 (DigitalGlobe) optical data and derived DSMs acquired in April, June, and August 2016. While the comparison showed very little change between most land cover classes, we found that the extent of the aquatic vegetation doubled in area from 4.5 ac to 9.6 ac between June and August 2016.
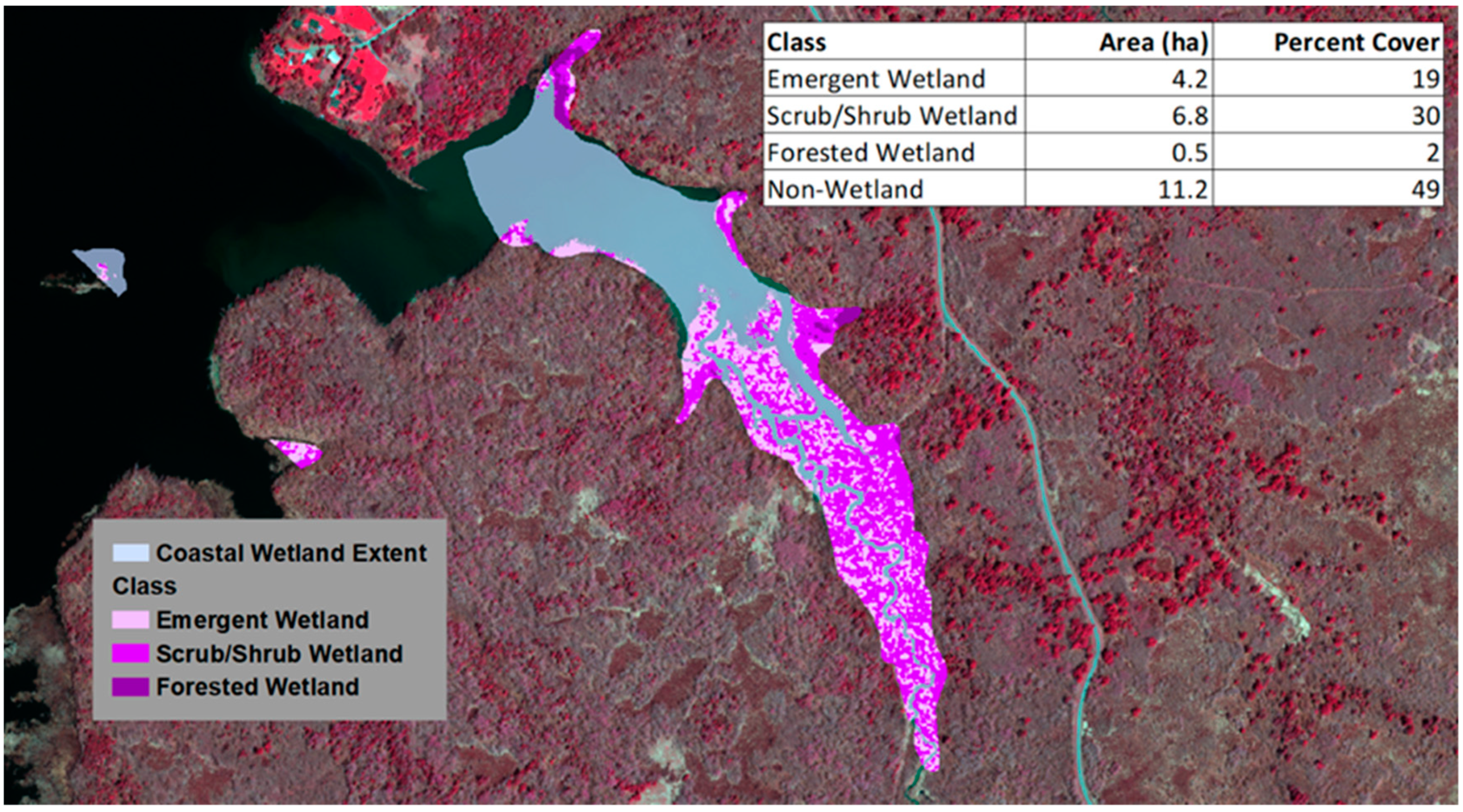
The OBIA approach was applied to a larger spatial extent using the Great Lakes Coastal Wetland Inventory (GLCWI) from the Great Lakes Coastal Wetland Consortium (
https://www.glc.org). The approach integrated the multispectral imagery, DSMs, and lidar-derived DEMs to create forested, scrub/shrub, and low vegetation classes using multiple height thresholds: Forested (>2 m), scrub/shrub (0.5 m < 2 m), and low vegetation (<0.5 m). The GLCWI polygons were used to summarize the vegetation classes in each polygon as forested, scrub/shrub, and emergent wetland classes. While the areal extent of each wetland polygon was used to summarize the area (ha) and percent cover for each class (
Figure 9). The OBIA process was readily transferable to each scene and used to batch process the Western Lake Superior region imagery (n = 622).
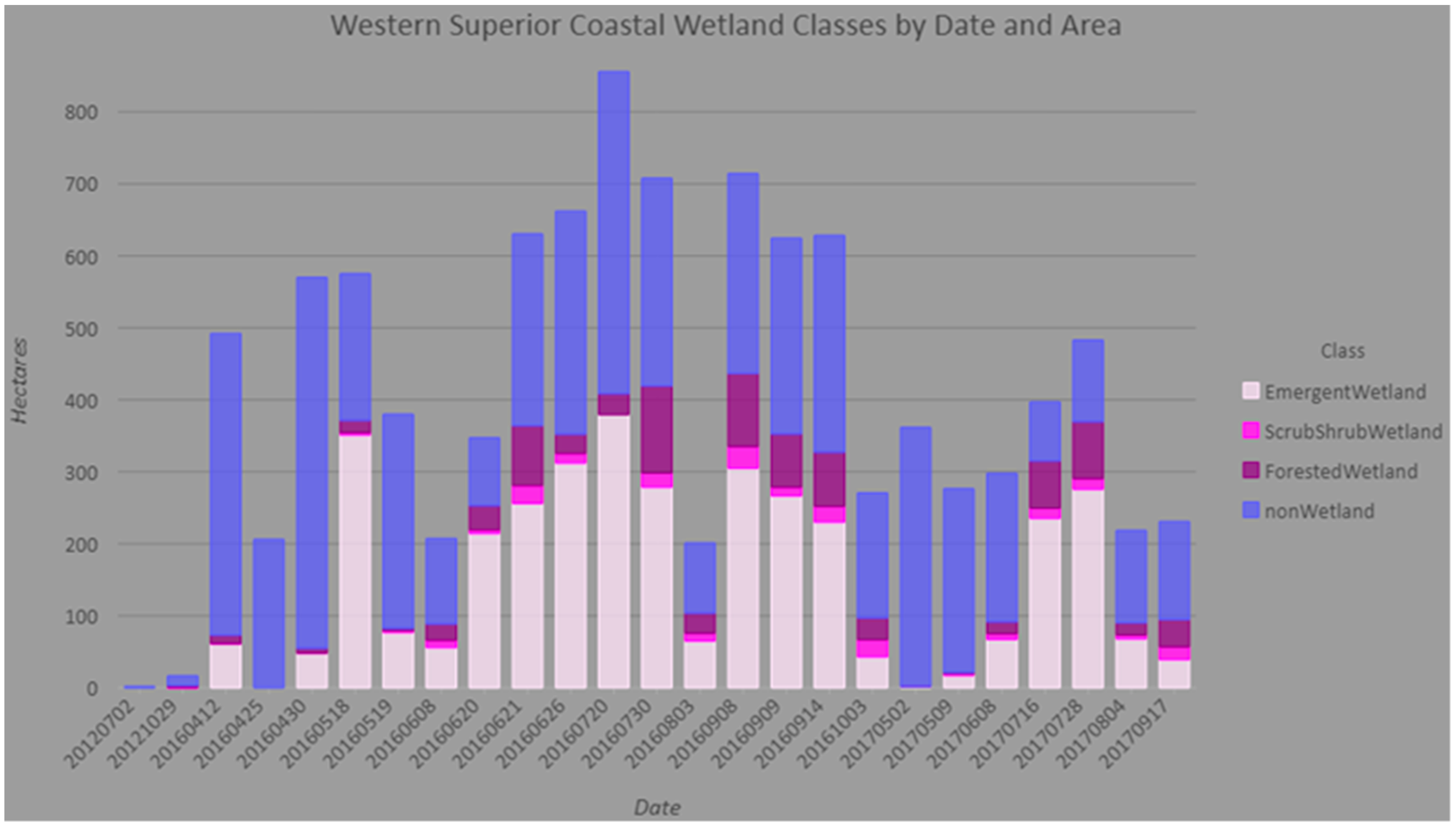
The Western Lake Superior region imagery was processed in batch and parallel using eCognition Developer (Trimble). These results were then manually reviewed and used to construct bar plots showing wetland area for the range of dates in the imagery archive and all of the wetland polygons (n = 192) in the Western Lake Superior region (
Figure 10). The Western Lake Superior region had 188,430 unique wetland polygons that cover 13,928.6 ha. This wetland product was created to integrate an existing wetland product used by stakeholders with up-to-date, value-added information. The next phase of the project will extend the wetland mapping to the entire basin and all GLCWI polygons.
4.2.3. SAR Based Classification Approach
While the classification approaches above show that optical imagery can be used to aid in accurately classifying wetlands, cloud cover often prohibits their use during critical times throughout the growing season. In addition to its sensitivity to moisture and structure conditions of wetland vegetation, Synthetic Aperture Radar (SAR) has the ability to penetrate clouds and collect data regardless of sun-illumination conditions. However, models based on SAR data alone are sometimes not able to achieve acceptable wetland classification accuracies, though sometimes accuracies can be improved by including a Digital Elevation Model (DEM) and or Digital Surface Model (DSM) [
29].
We tested RADARSAT-2 SAR data alone or in combination with a DEM/DSM to determine if it could be used to accurately classify the most common and spatially extensive wetland types throughout the Great Lakes basin. To do this, we constructed multiple Random Forest models with SAR data alone and in combination with a DEM/DSM and evaluated whether differences were statistically significant based on the McNemar’s Test [
57]. Models were also constructed with single and multi-angle SAR data, as well as imagery from the spring, summer, or both to determine if multi-angle or multi-temporal data improved wetland classification. These models were all constructed with and without the DEM/DSM to determine whether these data improved accuracies. The aforementioned models were then re-run using simulated compact polarimetric (CP) RADARSAT Constellation Mission data (RCM) instead of RADARSAT-2. This allowed us to compare FP to CP data and to determine if the loss of polarimetric data in the CP mode, as well as the higher noise-equivalent sigma zero (NESZ) on RCM data, will affect the accuracy of wetland classifications.
To assess how multi-temporal data and acquisition timing affected classification accuracy, different models were constructed based on (1) spring (April/May), (2) summer (July), and (3) the combination of spring and summer data. Six land cover classes were included in the summer and spring and summer classifications: (i) water; (ii) shallow water; (iii) marsh; (iv) swamp; (v) agriculture/non-forested; and (vi) forest (
Table 5). For all spring models, however, the shallow water class was not included due to a lack of vegetation at that time (i.e., these areas consisted only of open water).
Training and validation points were created by randomly distributing 500 points evenly throughout the entire study area. Afterward, each point was labelled as one of the six land cover classes based on a combination of field visits, and visual interpretation of UAV, WorldView, and Landsat imagery acquired between 2016–2018 in the spring, summer and fall. To sample each land cover class proportionally, additional training points were added by manually drawing polygons, randomly distributing points within them, and assigning each point an appropriate class label. 60% of these data were used as training data, while the remaining 40% were reserved for validation. Additional details on the training and validation methodology can be found in [
57].
RADARSAT-2 imagery was acquired at both relatively steep (23.3–25.3° FQ5W beam mode) and shallow (36.4–38° FQ17W beam mode) incidence angles, twice throughout the growing season of 2016 (FQ5W: 1 May and 12 July, FQ17W: 27 April and 8 July) to assess how multi-angle data and acquisition timing affected classification accuracy. Previous research has shown steep incidence angles are better able to detect moisture and/or open water [
58,
59], whereas shallow incidence angles can more accurately map vegetation phenology, height and density [
60]. The imagery was acquired to represent conditions before and after leaf-out to investigate optimal image timing to separate the classes considered here.
PCI Geomatica 2017 was used to process the RADARSAT-2 imagery, including calibration to sigma-naught, speckle filtering, and orthorectification. Variables included in the classification models were generated and stored in one multi-channel file (
Table 6). Simulated RCM data was generated as described in
Section 4.1.2. For this study, the simulated RCM data were not resampled to the nominal pixel spacing of the RCM beam modes. Instead, the same pixel spacing as the RADARSAT-2 data was used to avoid additional filtering (13.6 and 8.9 m for the FQ5W and FQ17W data). In instances where both beam modes were used in the model, the FQ17W was re-sampled to match pixel spacing of the FQ5W data.
The MNRF DEM and DSM data (Land Information Ontario) were created using 20 cm stereo orthophotos acquired between 2013 and 2015. Only the vertical accuracies of the DSM were reported, which differed by topography and land cover type. For example, the accuracies were ±15 m for open fields and ±6.36 m for deciduous trees at the 95% confidence level [
61]. To remove noise over the water we applied the approach described in Behnamian et al. [
40]. From these data, several derivatives were generated using the System for Automated Geoscientific Analyses (SAGA).
To classify all of the RADARSAT-2 and simulated RCM data we used the randomForests package in R [
62,
63]. For all models, 1000 trees were produced, and default settings were used to calculate the number of variables tested at each node and the final number of nodes to be created. Complete details and justification for these processing parameters can be found in [
29,
57,
64].
Four different metrics were used to assess model accuracy: (i) independent overall accuracy (proportion of all validation points that were correctly classified), (ii) independent overall accuracy of wetlands (proportion of all validation points for wetlands that were correctly classified), (iii) user’s accuracy (for each class, the proportion of points classified correctly), and (iv) producer’s accuracy (for each class the proportion of points classified correctly divided by the number of validation points for that same class). To determine the statistical significance between the classification results, the McNemar’s test with a 95% confidence interval was applied [
65]. For complete details on the data and methodology readers are referred to [
57].
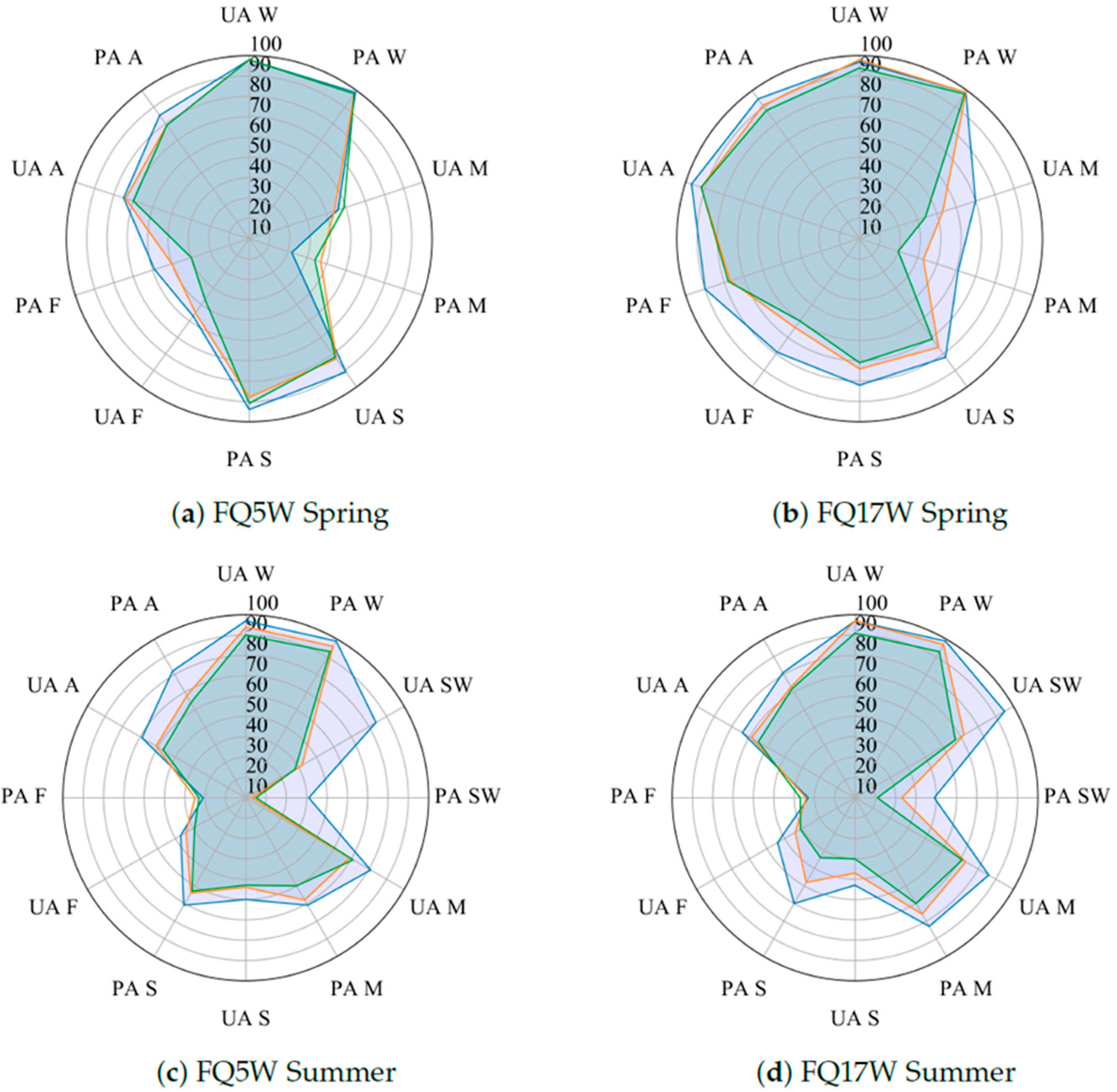
No Random Forest model based on a single SAR image was able to produce high accuracies (≥~80%) for all classes (
Figure 11). The addition of high-resolution DEM and DSM data resulted in statistically significant improvements in model accuracy in all cases, however, only models based on the FQ5W spring and FQ17W spring images in combination with DEM and DSM data achieved per-class user’s and producer’s accuracies above 80%.
For models based on single SAR images, those constructed with the simulated RCM CP data achieved significantly lower accuracies than those constructed with RADARSAT-2 FP data, however, following the addition of DEM/DSM data, accuracies were more comparable between models based on simulated CP and FP data. This suggests that with CP data, more information from a variety of different sources, are required to obtain the same accuracies as those achieved with FP data. Additionally, medium resolution CP models generally had higher accuracies compared to high resolution CP models. These results were not surprising given the higher NESZ value of the high-resolution mode data.
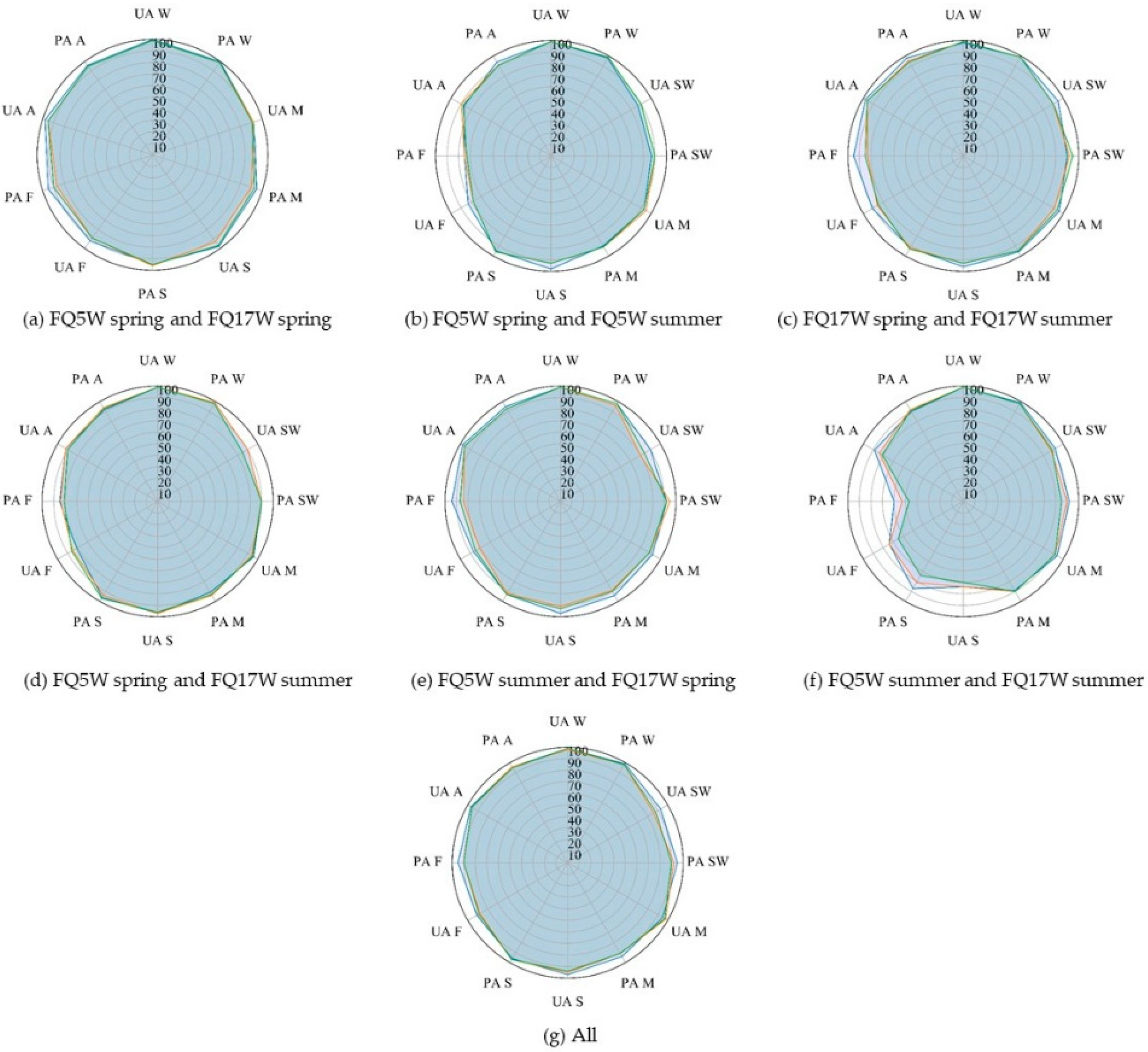
For models based on FP data, accuracies improved significantly when multi-temporal data (two or four images) were used as inputs to Random Forests. In fact, all models using multi-temporal (spring and summer) FP imagery achieved high accuracies (≥80%) for all classes, regardless of whether generated with data acquired at steep or shallow incidence angles (
Figure 12). These findings are consistent with others that similarly concluded using multi-temporal SAR data improved wetland classification [
22,
64], and can be explained by the fact that similar backscatter characteristics were observed for multiple classes in either spring or summer, making them difficult to separate at those times. For example, the marsh and swamp classes had comparable proportions of double-bounce and volume scattering in the spring, however, those proportions differed in the summer (
Figure 12). Consequently, by including both spring and summer RADARAT-2 imagery, separability between both classes improved. Similar results were observed for shallow water and agriculture/non-forested, which were more confused in the summer than in the spring.
Notably, for models based on multi-angle/multi-temporal data, the addition of the DEM/DSM only improved accuracies in some cases (overall accuracies improved by 1–21% for all models). For those based on simulated CP data, however, accuracies increased significantly in almost all cases, further demonstrating the importance of this additional information source for achieving comparable accuracies to the FP data. Exceptions included models based on two summer images and models based on all four CP images, for which accuracies were already high, and therefore a statistically significant difference was not observed following the addition of the DEM and DSM.
In most cases models based on medium resolution CP data had higher accuracies than those based on high-resolution CP data. However, this difference was on average less than 5% for all classes, except shallow water. This is as a result of the NESZ value of RCM data, in addition to fewer training and validation points, which caused additional confusion with agriculture/non-forest. Future RCM data users should consider the fact that both the medium and high-resolution beam modes have the same swath width, so one may be more advantageous than the other.
Results demonstrated that high classification accuracies could be achieved for the wetland classes in the Bay of Quinte with just multi-angle/temporal SAR data, and in some cases with just one SAR image, DEM and DSM data. For CP data, both multi-angle and multi-temporal data were needed to obtain acceptable classification accuracies for all classes. The addition of a DEM/DSM increased model accuracies significantly in all cases when only single SAR images were used, and in some cases with multi-angle/multi-temporal data. Results suggest that RCM data shows promise to classify wetlands with high accuracy. The high-revisit period of RCM will allow users to take advantage of multi-temporal and multi-angle data, both of which have been demonstrated as necessary to achieve high accuracies for all the classes evaluated here. These results will need to be verified with actual RCM data, especially since the NESZ values used to generate the simulated data were based on estimates.
4.2.4. SAR Based Change Detection Approach
In order to help prepare for the launch of RCM and determine its potential for mapping and monitoring wetland change we used simulated CP RCM data using the same simulation package described earlier in the medium resolution StripMap 16 m mode and compared it to FP RADARSAT-2 data in the Bay of Quinte, Ontario Canada. In this study, site there were three wetlands classes: (1) shallow water, (2) marsh, and (3) swamp. We applied the multi-temporal change detection method described in [
24] to the FP RADARSAT-2 and the simulated CP RCM data. We then compared the sensitivity of each dataset to multi-temporal changes in wetlands and discussed how the amount of polarimetric information and NESZ values may have affected the results.
Single look complex (SLC), fully polarimetric (FP) RADARSAT-2 images from the spring and summer of 2016 were used in this study (3 April, 27 April, 14 June, 8 July, 25 August). All images were acquired in the FQ17W beam mode at 37.2° incidence angle in the ascending look direction. By using the same type of imagery, we were able to ensure that none of the changes we detected were from differences in the imaging geometry, but rather from changes vegetation, water level, or soil moisture. All wetlands in the study area were labelled as shallow water, marsh, or swamp. Descriptions of the classes are provided in
Table 5. RADARSAT-2 and simulated RCM data were processed as described in
Section 4.2.3.
Python code from [
66] was used to apply a multi-temporal change detection method to all imagery. There were three main steps in the processing method: (1) estimate the Equivalent Number of Looks (ENL) for each coherency matrix, (2) co-register all of the matrices (stored as multi-channel files), and (3) detect the multi-temporal changes. There were also three raster outputs from the code, representing: (1) the timing of the first change, (2) the timing of the last change, and (3) the frequency of change.
Field data was not available to determine the cause of change. Instead, expert knowledge and mean intensity values, double-bounce, volume, and surface scattering contributions from the Freeman-Durden decomposition for 1000 randomly selected pixels for each wetland class were used to interpret the results. Note that because the same processing was applied to both the FP and CP data, we assumed that any differences in the changes detected between the two datasets were as a result of the differences in information content and NESZ values only. For more complete details about the data processing method readers are referred to [
24].
Timing of First Change
Both FP and CP data were able to detect changes within the wetlands throughout the growing season, but the timing and frequency of changes between the two differed (
Figure 13). In some cases, the FP data was able to detect the first change in the growing season earlier than CP data (
Figure 13a). For example, on 27 April the FP data recorded that 36 pixels in the shallow water class had changed in comparison to only 7 with the CP data. The same trend was observed for the marsh and swamp classes. On 27 April, change was detected for 253 pixels with the FP data for the marsh class, while change was only detected for 113 pixels with the CP data. On the same date, the FP data indicated that 148 pixels had changed in the swamp class, but the CP data only detected a change in 12 pixels (
Figure 13a).
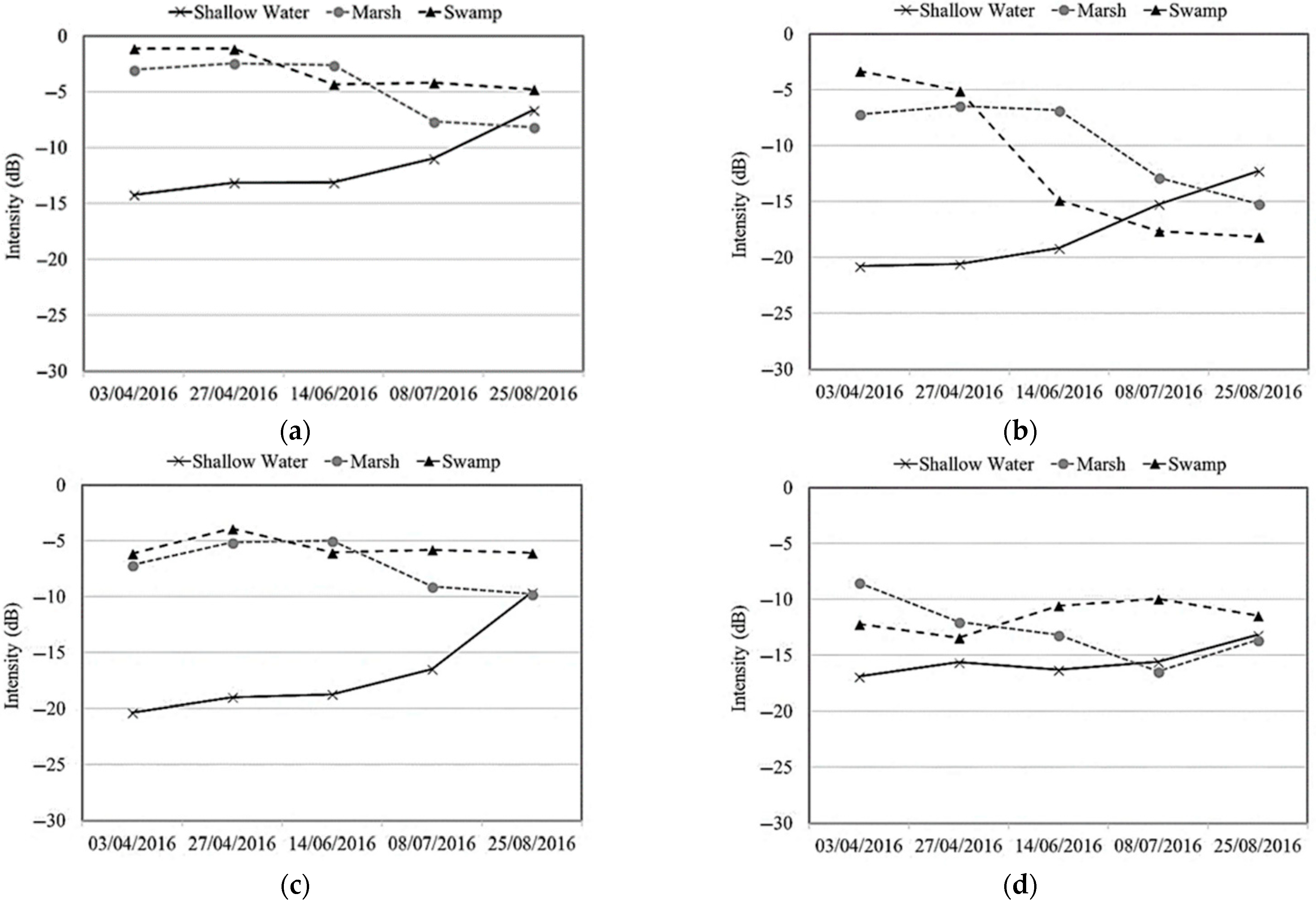
Capacity to detect change in the shallow water class was linked to several factors, including the combined effects of the size, shape, orientation, abundance and or spatial distribution of vegetation. Visual interpretation of WorldView data demonstrated that early season growth of lily pads, cattails and reeds (identified in some areas by June 6th) could not be detected in either the FP or CP data. It was theorized that this was due to the vegetation being relatively short in stature and low in density, resulting in predominant specular reflection and low backscatter returns, thus values were similar to the open water that was present beforehand (
Figure 14). As the growing season progressed however, contributions of double-bounce scattering increased and the change from open water to vegetation was eventually detected in some cases by July 8th (
Figure 14). July 8th was also the time when the first change was detected in a majority of cases for the marsh class. This is similarly attributed to growth to the increase in size and density of live cattails among a dense mat of senescent vegetation (mostly cattails). In contrast, the first change detected in a majority of cases for swamp was earlier in the season on June 14th. This change is attributable to the leaf out of the canopy, resulting in a significant decrease in the contribution of double bounce scattering (
Figure 14). This occurred because of increased signal attenuation at the top of the canopy, preventing penetration to the flooded trunks below.
Timing of Last Change
In many cases, the FP data was able to detect changes at a later date compared to the CP data. For the shallow water class, change was detected for 865 pixels with the FP data on 25 August, but a last change was only detected for 784 pixels on this date with the CP data. The same was true for the marsh class, with change being detected for 463 pixels with the FP data on 25 August, compared to 254 with the CP data. In the case of the shallow water class, there was an increase in the intensity of the double-bounce backscatter from 8 July to 25 August, likely due to continued growth in the size and density of vegetation. For the marsh class, there was a large decrease in mean double-bounce values between July 8th and August 25th. This is likely due to increased attenuation within an increasingly dense vegetation canopy, thus resulting in volume scattering becoming the dominant contributor to total power (
Figure 14). This decline in double-bounce scattering could also be due to lower water levels, which was confirmed with water level loggers in a few locations throughout the study area (e.g., decreases of of 2.47 and 1.98 m were observed at two different locations between 8 May to 8 July). This would have led to an increase in the path length between the signal and water level, leading to greater attenuation within the canopy.
Interestingly, for the swamp class, the first change detected on June 14th was also the last statistically significant change in the time series in a majority of cases, and this was observed with both the FP and the CP data (
Figure 13). Results from the Freeman-Durden decomposition indicated that there was a large decrease in double-bounce backscattering (10 dB) from 27 April to 14 June (
Figure 14). After this date double-bounce scattering had the lowest contribution to total power and volume scattering had the highest (
Figure 14). This is again, likely due to the leafing out of the canopy preventing the radar signal from reaching the ground, resulting in an increase in volume scattering [
67,
68], though it is also possible that some swamps dried up throughout the growing season.
Frequency of Change
For all three wetland classes, the FP radar data detected a higher frequency of changes compared to the CP data. For the shallow water class, two changes were observed for the majority of pixels with both the FP and CP data. However, there were two changes detected in 668 pixels with the FP data and only 577 with the CP data. When we compared the number of pixels that had only changed once the CP data had 144 more compared to the FP data. For the marsh class, two changes were observed for most pixels (440) with the FP data, but only one change for most pixels (648) with the CP data. While both the FP and CP data only had one change for most of the pixels in the swamp class, 181 pixels for the CP data also had no change.
Differences between the FP and CP Data Change Detection Results
As noted earlier, FP RADARSAT-2 data provide complete target information, whereas CP data only provides only partial target information. This, together with the lower NESZ of the FP data, explains why the FP SAR being able to detect changes both earlier and later in the growing season, as well as a higher frequency of changes (
Figure 10). However, when we quantitatively compared the change detection results between the FP and CP SAR data, there was greater than 90% agreement for all three wetland classes (
Table 7). The shallow water class had the highest percentage agreement for the first change, last change, and frequency of change. The swamp class had the lowest percent agreement for the first (92.2%) and the last change (93.1%).
These results demonstrate the potential of RCM data to be used to detect changes in wetlands. Results indicated that the simulated RCM data was less sensitive to detecting the first change, last change and frequency of changes compared to RADARSAT-2 due to incomplete target information and a higher NESZ value. However, there was greater than 90% agreement for all three wetland classes included in this study. Future research is needed to validate these results using real RCM data.
4.3. Multi-Temporal Vegetation Elevation and Ecosystem Models
DigitalGlobe imagery, available under the NGA NextView license, is available in large quantities providing high temporal frequency and great levels of detail. The DigitalGlobe fleet includes the WorldView sensors which have the capability to collect stereo imagery. Stereo pairs image the same location from different angles, typically within seconds, enabling the development of high-resolution digital surface models (DSMs). The DSMs represent the elevation of the vegetation canopy, as opposed to the height of the ground represented by standard Digital Elevation Models (DEMs). The DSM products are useful individually when combined with accurate DEM information, providing insight into vegetation canopy height, which can be used to distinguish trees, shrubs, and emergent vegetation. When multiple DSMs are available for a single location, it is possible to assess changes in vegetation characteristics, allowing researchers and managers to explore the cause of the changes (e.g., development, water level changes, invasion by non-native plants).
A significant challenge when dealing with basin-wide high resolution stereo coverage is the ability to store and process the data. This task, handled by SharedGeo, required specific hardware and software infrastructure. Local computers, servers, and internet connections were installed at SharedGeo and the University of Minnesota to support data storage and transfer. Storage was upgraded to over 200 TB to accommodate imagery as it arrived.
The tool used for creating digital surface models from satellite imagery was SETSM photogrammetric software [
69], which is known to work well in the supercomputing environment. We evaluated the differences between running SETSM at 2 m versus 50 cm and also comparing the output to Ames Stereo Pipeline (ASP) [
70] for the same scenes. Observations showed that the 50 cm outputs perform better in terms of missing a fewer number of small tree clumps compared to the 2 m SETSM output. However, we chose to continue running SETSM at 2 m due to processing constraints and file size considerations with 50 cm output.
The process we used for working with SETSM and its output in the supercomputing environment was developed by the Polar Geospatial Center (PGC) at the University of Minnesota (U of MN) [
71]. By using this process, we took advantage of their experience and our outputs would be compatible with those produced by PGC and others for other parts of the globe. PGC cooperated with this project by providing post-processing of the SETSM output. We met frequently with the Polar Geospatial Center at the U of MN to coordinate, share strategies and avoid duplication of work, especially during the last 6 months as we examined and evaluated outputs together and found ways to improve processes. For example, we found that 50 cm tests on Blue Waters showed that for full scenes SETSM is running out of memory; this appears solvable with code changes that we plan to explore further. SharedGeo staff also assisted PGC in improving the job scripts to be more robust and reduce the number of errors and wasted computer time.
The amount of computation required to produce the surface models needed for this project was massive. It takes roughly 12 h on average for SETSM to produce a 2 m DSM for a single stamp pair. As we had tens to hundreds of thousands of stamp pairs to process, we needed a massive amount computer time, certainly more than SharedGeo could assemble locally or in the cloud, and more than what was reasonable to run at the Minnesota Supercomputing Institute at the University of Minnesota. The project team was awarded a grant with the help of the Minnesota Department of Natural Resources of 540,000 node hours of computer time on the NSF funded Blue Waters petascale supercomputer through the Great Lakes Consortium for Petascale Computation [
72,
73]. The massive amount of data ingested required an additional 495,000 node hours after the first phase. By using various charge rate breaks such as running interruptible jobs and taking advantage of times when Blue Waters was underutilized, we were able to process 107,000 stamp pairs in 812,000 charged node hours on Blue Waters.
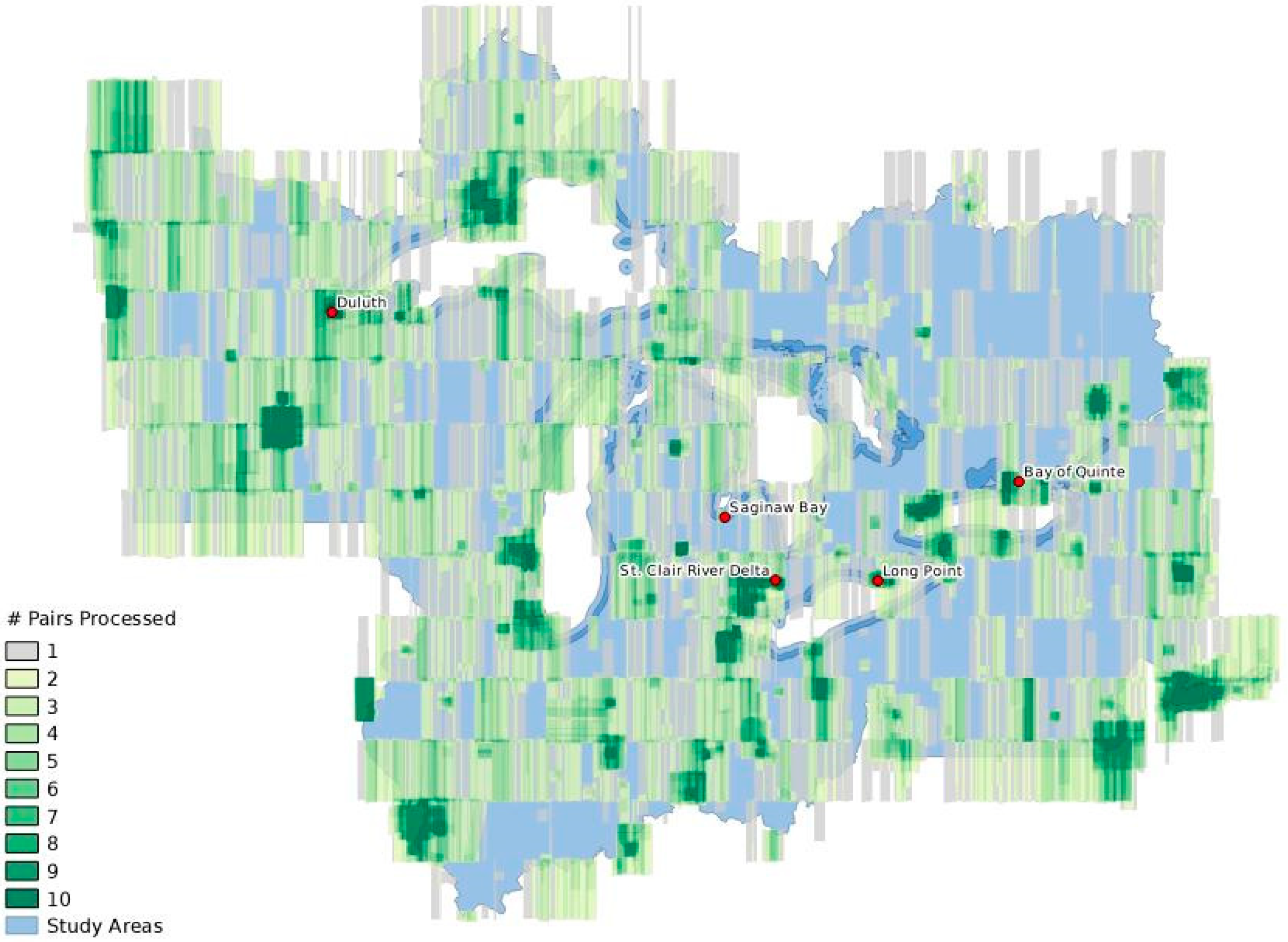
Imagery acquired from DigitalGlobe is indexed using “catalog IDs”. Two catalog IDs with spatial and temporal overlap can be used as a stereo pair which is the required input to produce a DSM. We obtained over 10,200 catalog IDs (5100 stereo pairs) from Digital Globe, covering 4,900,000 sq.km. in the primary study area in the Great Lakes Basin. In total, this includes over 13,000 stereo pairs covering over 14,400,000 sq.km. with acquisition dates primarily ranging from 2012–2018 with scattered coverage back to 2002 adding up to 100 TB of data (
Figure 15).
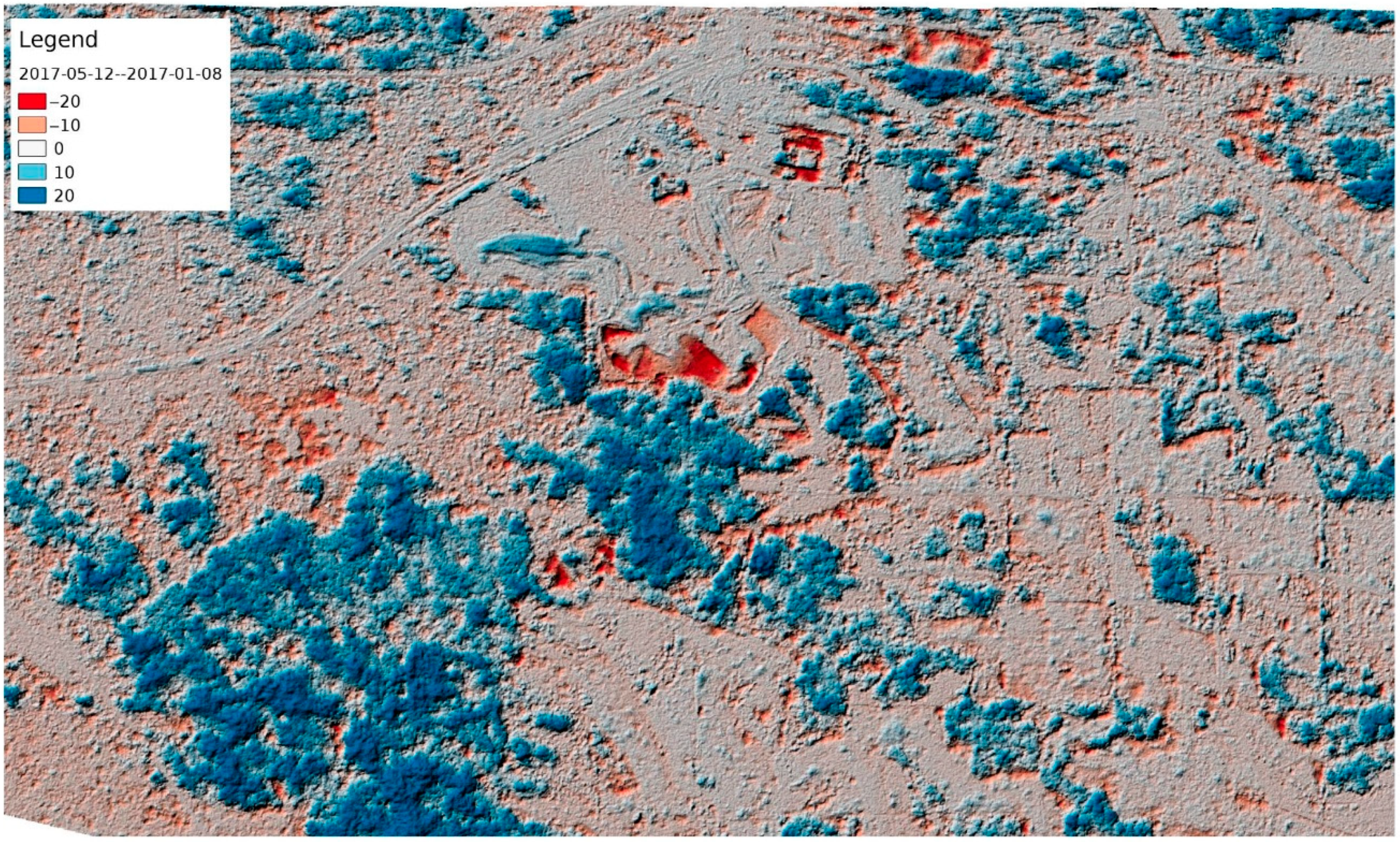
Each DigitalGlobe stereo pair is made up of roughly 8 stamp pairs. We produced over 107,000 of 2 m surface models (DSMs) from the DigitalGlobe stamp pairs. The PGC post-processing procedure combines the stamps back into strips and filters out unreliable areas in the data, such as areas obscured by clouds. PGC has continued to improve the filtering process and move it from Matlab licensed code to Python which may allow us to incorporate it into a workflow that is transportable to other systems that leverage open-source software. Analysis of multi-temporal DSM outputs has shown the utility of using them to detect changes in vegetation height and other anthropogenic changes. The example below shows changes between winter and late spring acquisition dates (
Figure 16).
In the winter leaf-off scene the ground between the trees was visible and was the main feature detected for determining the elevation. In the late spring, the canopy (where present) obscured the ground from view as was detected as an increase in elevation.
Figure 15 shows both the blue increase in elevation from the tree canopy change from leaf-off to leaf-on, but also anthropogenic change, determined to be mining activity, as the red area in the center.
Evaluation of various DSMs found the root mean square error (RMSE) is in the range of 1.2–1.6 m. This means any change detection is better suited to large vegetation disturbances and construction projects vs. smaller fluctuations such as water level changes. We also found that the DSMs measure different things based on time of year. In particular, leaf off vs. leaf on allows easy identification of deciduous forests, and provides the ability to measure ground elevation in the leaf off scenes.
To this point, all available sub-meter, commercial optical satellite imagery for the Great Lakes Basin have been processed and will continue to be processed to create surface vegetation elevation models to two-meter resolution. Continued acquisitions have been tasked to fill in the gaps and create summer and winter surface elevation models.
4.4. InSAR Water Level Monitoring
High interferometric coherence may be maintained in inundated wetlands with repeat-pass SAR observations due to the double-bounce scattering occurring between the water surface and vertically oriented vegetation, thus permitting the generation of InSAR interferograms and reliable measurements of phase variations related to water level changes [
74]. Fluctuating water levels in dynamic water bodies, such as the Great Lakes affect SAR backscattering coefficients, InSAR coherence and interferograms over marshes [
74]. Given the high coherence and double-bounce scattering as main scattering mechanism in the wetland, we theorize that the deformation is the result of water level changes. It is important to understand the potential to use InSAR to monitor water level fluctuations in various wetland environments in the Great Lakes Basin. Although all polarizations can be used to generate interferograms, previous studies [
75] have shown that coherence values are the highest for HH, followed by VV, and HV or VH being the lowest. Coherence in wetlands is generally lower in acquisitions over two repeat cycles than that of one repeat cycle for Radarsat-2 C-band data (24 days for one repeat cycle) [
74]. As such, the small baseline subset (SBAS) technique [
76] may be exploited to use all the interferograms with short temporal and spatial baselines for wetland water level studies [
74,
75]. To address the objective of using InSAR to monitor wetland water level change in the Great Lakes Basin, C-band SAR data of HH polarization from Radarsat-2 are investigated using the SBAS based method to evaluate the suitability of InSAR in different wetland environments, including shallow water, marsh and swamp in two study areas, Bay of Quinte, Ontario, and Long Point, Ontario Canada.
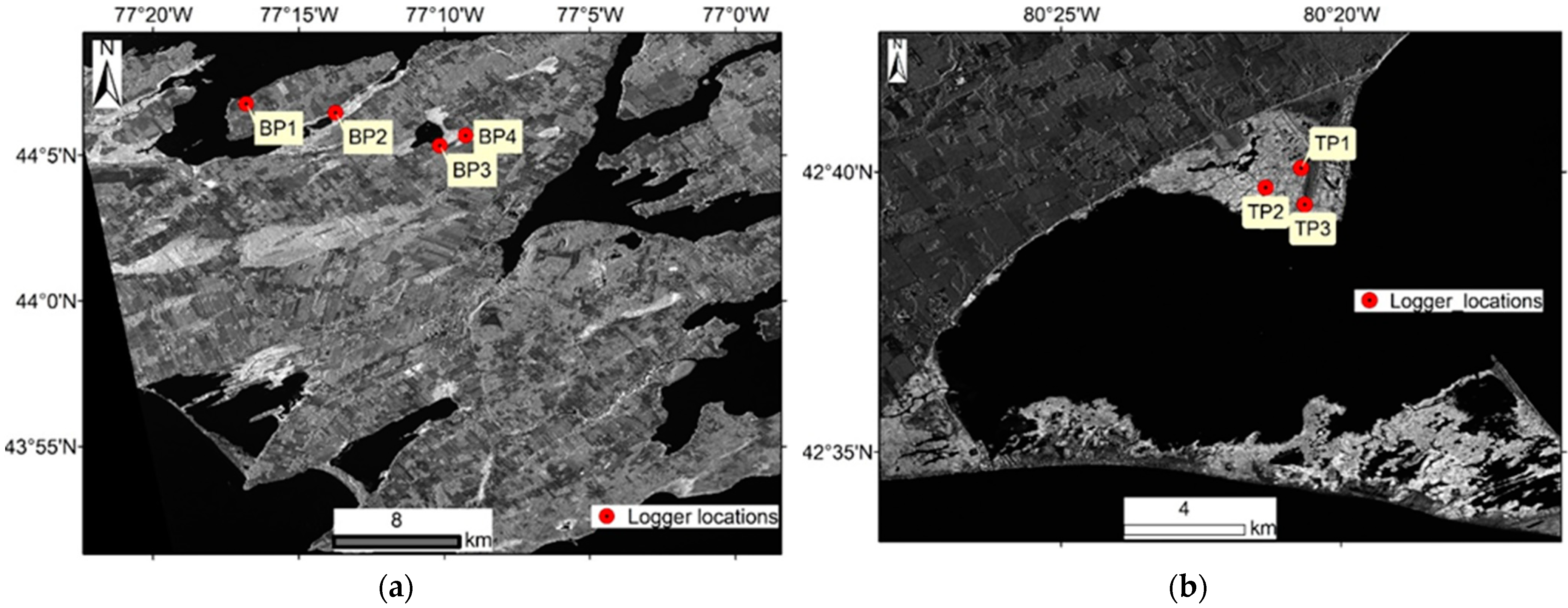
For the Bay of Quinte study area (
Figure 17a), readers are referred to the description of the Bay of Quinte above. Nine scenes of Radarsat-2 FQ5W mode, eight scenes of Radarsat-2 FQ17W, seven scenes of Radarsat-2 U7W2 mode were collected. The FQ5W and FQ17W datasets were quad polarized (HH, HV, VV, VH) while the U7W2 data was single polarized (HH).
The Long Point study area is located on the Canadian side of Lake Erie in Ontario (
Figure 17b), and encompasses Turkey Point (TP), the National Wildlife Area at Big Creek (BC), the Long Point Provincial Park and Crown Marsh at Old Cut (OC), and the National Wildlife Area at Thoroughfare (TH). Both shallow water and marsh wetland types were considered in this site. Marsh is the dominant wetland type in Long Point, characterized by an interspersion of marsh meadow and emergent aquatic vegetation, primarily dominated by cattail and/or common reed (
Phragmites australis). Both cattail and Phragmites are normally 2–3 m tall and are capable of forming dense stands. Seven scenes of Radarsat-2 FQ1W mode, eight scenes of Radarsat-2 FQ18W, eight scenes of Radarsat-2 U23W2 mode were collected. The FQ1W and FQ18W datasets were quad polarized (HH, HV, VV, VH) while the U23W2 data was single polarized (HH). Only the data of HH polarization from Radarsat-2 acquired within 24 days was evaluated.
Solinst water level loggers were installed in two locations in the marsh and two locations in the swamp in Bay of Quinte (
Figure 17a), and three locations in the marsh in Long Point (
Figure 17b). Water level measurements from loggers were collected from April to November in 2018 to validate InSAR measurements. In Long Point, the water levels over three locations near Turkey Point also provided information for investigating the sensitivity of InSAR measurements to changes in the elevation and direction of flow of water for transects running from south to north and from southwest to northeast.
Traditional differential InSAR (D-InSAR) processing was applied first to produce D-InSAR measurements. This procedure included co-registering and resampling all the InSAR images from one orbit (same polarization and incidence angle) to the same reference image, generating differential interferograms, and phase unwrapping using the Minimum Cost Flow algorithm [
77] with a reference point. All InSAR processing was performed using GAMMA software. Multi-looking and resampling were applied to make all products of U7W2 at 10 m, FQ5W and FQ17W at 30 m for Bay of Quinte study area, and U23W2 at 10 m, FQ1W and FQ18W at 30 m for Long Point study area. Then coherence analysis was conducted to evaluate the quality of interferograms over different wetland types, and the influence of various incidence angles and resolutions on the coherence. Finally, water level change was extracted using SBAS methods.
In the coherence analysis, average coherence values were calculated for different wetland types. In Bay of Quinte, the coherence was calculated over the polygons containing shallow water (labeled as “Water”), and marsh vegetation composed primarily of cattail (labeled as “Cattail”), and swamp vegetation composed primarily of woody plants (labeled as “Swamp”). In Long Point, the coherence was calculated over the shallow water (labeled as “Water”), and marsh vegetation composed of a mix of cattail and Phragmites (labeled as “Cattail/Phragmites”), and marsh meadow dominated by grasses (labeled as “Grass”).
In the water level analysis, a coherence threshold of 0.3 was used to identify coherent pixels in each coherence map, then the SBAS approach was applied to measure water level changes observed in time series interferograms. In the SBAS analysis, the quality interferograms from the same mode were used to form a network of subsets containing the interferograms of small baselines, then the water level changes evolving over the time were extracted using the singular value decomposition (SVD) algorithm. Cumulative water level calculated from the SBAS analysis only provided relevant information for those pixels with high coherence and was then validated using in-situ measurements. A linear regression was applied to model their relationship. R square and root mean square errors (RMSE) were calculated to determine the significance of results.
Results for all four Radarsat-2 modes indicated that Cattail has higher coherence values than Swamp and Water in Bay of Quinte. For example, average coherence values were 0.55–0.69 for Cattail, 0.39–0.54 for Swamp, and 0.32–0.43 for Water (
Table 8). Results showed that coherence values varied in different swamp areas throughout the season. For example, sparser canopies observed during April-May allows more penetration than the denser canopies observed between June-October. Overall, both backscattering power and coherence over swamp were higher in the early season than the later season.
Results in Long Point demonstrated that coherence from Cattail/Phragmites was generally higher than that from Grass and Water in all three modes. For example, coherence values were 0.72–0.77 for Cattail/Phragmites, 0.41–0.62 for grass, and 0.21–0.28 for shallow water (
Table 9).
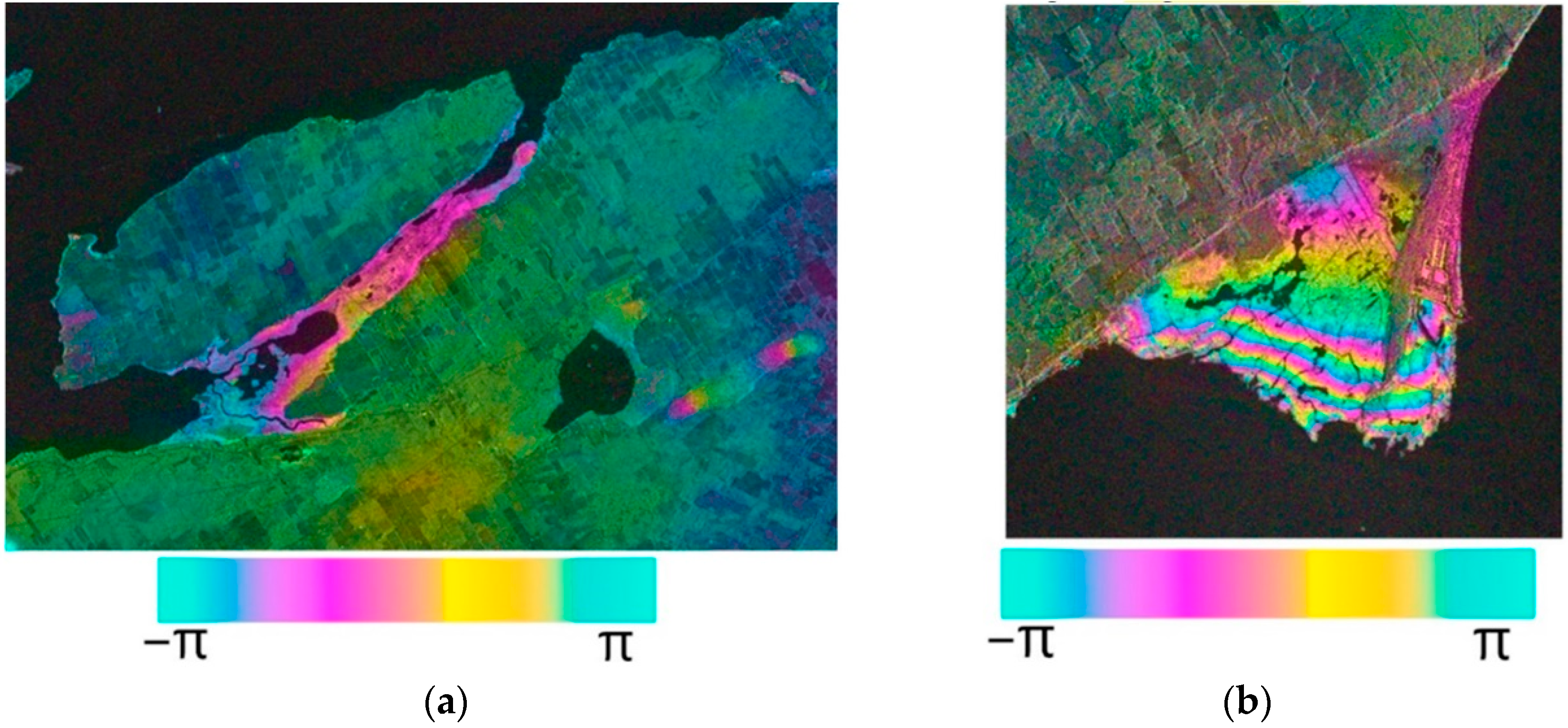
The results from the coherence analysis in both areas indicated that coherence in marsh dominated by Cattail or Cattail/Phragmites remained the highest, followed by Grass, then Swamp. Water had the lowest coherence. It seems that change in incidence angles and resolution did not affect coherence in Cattail or Cattail/Phragmites dominated marsh, although the small size of wetlands in the Bay of Quinte may not be accurately represented by coarse resolution. When the wetland size was less than 100 m by 100 m, the averaging process for coherence calculation might include the neighborhood of non-wetlands. It was found that the changes of interferogram fringes mainly occurred in wetlands, which indicated water level changes (
Figure 18).
InSAR results in Bay of Quinte were validated at four locations using field measurements in 2018. Both positive and negative correlations between field measurements and InSAR observations were found in BP1 and BP2 locations from the cattail dominated marshes, and BP3 and BP4 locations from the swamps (
Table 10). For all three imaging modes there was a strong positive correlation with field measurements at both BP2 (a marsh site) and BP3 (a swamp site). However, there were mixed results in the other two sites. In particular, low correlation was found in BP4 (a swamp site) from FQ5W and FQ17W modes (correlation of 0 and −0.1 respectively). RMSE values of up to 38 cm were also observed when comparing InSAR to field measurements. Therefore, it was not possible to draw conclusions on the effect of incidence angle and resolution. Results indicated that the finer resolution mode U7W2 performed better than other modes in swamp with a positive correlation and smaller RMSE values, and FQ5W performed better in marsh compared to U7W2 and FQ17W.
InSAR results in Long Point were validated at three locations using field measurements in 2018. Only results from FQ18W were positively correlated with field measurements of water level changes in all three marsh locations (
Table 11). Results generated from the other two datasets were variable in three locations, although the finer resolution U23W2 had smaller RMSE values.
Differences in water level along the southwest-northeast transect (TP2_TP1,
Figure 17) and the south-north transect (TP3_TP1) detected using InSAR were compared with that measured by in-situ instruments. Results indicated that the InSAR measurements from all three modes were sensitive to the water level change along the southwest-northeast transect, but uncertainty remained along the south-north transect (
Table 12). Note that there was little water level difference in the east-west direction in the study area and so results for that transect were inconclusive. Overall, the finer resolution U23W2 was observed to be more sensitive than other modes in measuring the change along the flow path.
Based on the results from coherence and water level analyses, it was not possible to draw conclusions on the effect of incidence angle, and resolution on InSAR measurements. We found that generally, InSAR interferograms from finer resolution images produced clearer fringe patterns than those from coarser resolution images in both study areas. Finer resolution data may more adequately represent changes in smaller wetlands. In-situ measurements in both the Bay of Quinte and Long Point showed that daily water levels fluctuated by up to 30 cm, with the greatest variations being observed in April, and between September and October 2018. Marshes had more water level variations than swamps, however, the coherence of cattail/Phragmites dominated marshes was higher than in swamps.
The correlation analysis produced mixed results for the different locations and imaging modes, with variable correlation values and large RMSE between field-measured water level and InSAR measurements. This is largely as a result of the combination of high fluctuations in water levels that occurred over short time periods, and the relatively long-time interval between SAR observations. Higher RMSE values between InSAR and in-situ field measurements in the marsh in Bay of Quinte (compared to that of Long Point) was due to low variation of the interferogram fringe. The low coherence in swamp also resulted in low correlation between field measurements and InSAR observations in FQ5W and FQ17W modes in one of the swamp areas. Only half a fringe was measured throughout most interferograms for the Bay of Quinte, compared to 1–2 fringes in Long Point. Therefore, a large RMSE was found between InSAR and field measurements. For example, although a correlation of 0.87 was found with FQ5W observations, the RMSE represented up to a 38 cm offset between InSAR and field measurements. Given fewer observed fringe cycles, and the large RMSE between InSAR observations and field measurements in this study, C-band data with a 24-day repeating cycle may not be sufficient to detect water level changes in areas like the Bay of Quinte and Long Point, where there is dynamic water level change (both daily water level and accumulated water level > 10 cm).
Overall, these results demonstrated that InSAR phase changes were sensitive to differences in water level and in the direction of flow in some cases. Although observed coherence in marshes was generally high, results from correlation and RMSE analysis showed that the relationship between InSAR measurements and field-based water level changes varied depending on the site, type of vegetation, and incidence angle. Resolution and incidence angles did not affect the coherence quality in large wetlands. Results suggest that InSAR observations based on C-band data, within a 24-day repeat cycle, may not be sufficient to maintain temporal coherence, and thus to also represent the water level changes in such dynamic wetland environments. Further studies on the potential of InSAR for water level monitoring with long term observations in various study sites and SAR sensors with shorter repeat cycles will be considered. Given a shorter acquisition cycle of four days with a constellation of three satellites, the RCM data is expected to improve InSAR applications because higher coherence can be maintained within a shorter time period, which may make it possible to detect dynamic water level changes in the future.


 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}