
Explicit Solutions of MHD Flow and Heat Transfer of Casson Fluid over an Exponentially Shrinking Sheet with Suction


1
School of Naval Architecture, Ocean and Civil Engineering, Shanghai Jiao Tong University, Shanghai 200240, China
2
Marine Numerical Experiment Center, State Key Laboratory of Ocean Engineering, Shanghai 200240, China
*
Author to whom correspondence should be addressed.
†
These authors contributed equally to this work.
Nanomaterials 2022, 12(19), 3289; https://doi.org/10.3390/nano12193289
Submission received: 16 August 2022
/
Revised: 12 September 2022
/
Accepted: 18 September 2022
/
Published: 21 September 2022
(This article belongs to the Special Issue Advances of Nanoscale Fluid Mechanics)
Abstract
:In this study, the magnetohydrodynamic (MHD) flow and heat transfer of a Casson fluid over an exponentially shrinking sheet with suction is investigated using the homotopy analysis method (HAM). Different from previous numerical methods and analytical techniques, we have obtained an explicit formula solution to the presented nonlinear problem. The explicit solutions of and are obtained and are valid in the whole domain. The changes in velocity and temperature profiles are studied in cases of different Casson fluid parameter , magnetic interaction parameter M, suction parameter s, and Prandtl number . The convergent solutions are verified by comparison with the numerical results. In addition, the skin friction coefficient and local Nusselt number are analyzed using the analytic formulas of and , respectively. The analytical formulas help us intuitively analyze the influence of various parameters at the theoretical level. The effects of different physical quantities on and are thoroughly investigated.
1. Introduction
Magnetohydrodynamics (MHD) refers to the study of the properties of magnetic fields and electrically conducting fluids. It focuses on the mutual interaction between fluid flow and magnetic fields. Thus, the fluids are required to be electrically conductive and non-magnetic, e.g., saltwater, plasmas, liquid metals, and electrolytes. MHD flows have found application in many branches of fluid mechanics [1,2,3,4]. The appearance of three-dimensional objects in wall-bounded MHD flows are characterized experimentally [5]. Reddy et al. [6] obtained numerical solutions of MHD flows in an electrically conductive fluid driven by a traveling magnetic field imposed at the end caps of a cylindrical annulus. Camobreco et al. [7] examined base flow influence in the context of the transition to turbulence in a quasi-two-dimensional MHD flow. With the development of MHD flow, many researchers have begun paying attention to boundary layer problems in MHD flow.
Most boundary layer problems considered in MHD flow are nonlinear. The flows are usually governed by one- or multiple-coupled nonlinear ordinary differential equations (ODEs). Thus, it is of great significance to develop effective methods to solve these nonlinear problems. Many researchers have conducted investigations on MHD boundary layer flow. Mukhopadhyay et al. [8] numerically studied the MHD boundary layer flow over a heated stretching sheet with variable viscosity. We investigate an MHD free-convection boundary layer flow saturated in a Darcian–Forchheimer porous medium over a vertical flat plate in the presence of suction/injection effect. This is conducted numerically by employing the routine bvp4c of the symbolic computer algebra software MATLAB [9]. The MHD boundary layer flow over a nonlinear stretching sheet is studied by a direct collocation method based on rational Legendre functions [10]. In addition to the MHD boundary layer problem of Newtonian fluids, attention has also increasingly shifted toward the certain flow problems of non-Newtonian fluids acting on the MHD boundary layer.
Recently, MHD boundary layer flow combined with Casson fluid has attracted the interest of many researchers. As a non-Newtonian fluid, Casson fluid is very common in nature and man-made products, such as jelly, soap, honey, and human blood. Some theoretical analyses of the related MHD Casson fluid flow have been conducted by several researchers through various numerical techniques [11,12,13,14]. Although there exists an abundance of numerical methods to deal with the nonlinear MHD boundary layer flow of a Casson fluid, the obtainment of an explicit analytical approximation of these nonlinear problems remains a challenging task.
We note that Nadeema et al. [15] employed the Adomian Decomposition Method (ADM) and numerically studied the MHD boundary layer flow of a Casson fluid induced by an exponentially shrinking sheet. In their work, the heat transfer of Casson fluid over the exponentially shrinking sheet is not considered. However, heat transfer is a crucial aspect applied in different engineering areas such as materials, energy, machinery, chemical industry, medicine, and other fields. Casson fluid is a typical non-Newtonian fluid, and it is of great significance to study its heat transfer characteristics in MHD boundary layer flow in practice. To the best of our knowledge, no explicit analytical solutions have been presented for the MHD flow and heat transfer of a Casson fluid over an exponentially shrinking sheet. This provides the inspiration behind us conducting this study.
In this paper, we apply the homotopy analysis method (HAM) [16,17,18,19] to the nonlinear MHD flow and heat transfer of a Casson fluid over an exponentially shrinking sheet with suction. The HAM method allows great freedom in the selection of proper base functions, auxiliary linear operators, initial guesses of unknowns, and convergence-control parameters. This method provides a straightforward way to ensure the convergence of solution series in nonlinear problems even for strongly nonlinear equations. Nowadays, it is widely applied to solve many strongly nonlinear problems in different areas [20,21,22,23,24,25,26,27]. The success of these applications demonstrates the great potential of the HAM method. In particular, the HAM method has been used to deal with many boundary layer flows, such as Blasius’ viscous flow [28], MHD Falkner–Skan flow of nano-fluids [29], Casson fluid flow with stretching sheet [30], and fluid flow over an exponentially stretching porous sheet [31]. These encourage us to employ the HAM method to the present boundary layer flow and further improve it.
We emphasize that explicit analytic formulas for the velocity and temperature distribution in a considered system do not currently exist, and which should also be valid in the whole domain. This motivates us to solve the problem. In the next section, we provide the mathematical model and formulas of the present boundary layer flow. The explicit analytic solutions of the current system are given in Section 3. In Section 4, we test the obtained explicit analytic solutions. The convergence and accuracy of solutions are evaluated in detail. Discussions concerning the effects of various physical parameters are investigated in Section 5. Summaries are presented in the last Section 6.
2. Mathematical Model
Consider the steady two-dimensional MHD boundary layer flow of a Casson fluid over an exponentially shrinking sheet. As illustrated in Figure 1, we assume that denotes the velocity of the shrinking sheet, is the variable wall mass transfer velocity, is the uniformly distributed sheet temperature, is the free stream temperature assumed to be constant, where
corresponds to the heated shrinking sheet. The fluid is electrically conductive with the uniform magnetic field applied normal to the shrinking sheet. Under the boundary layer approximations, the governing equations of continuity, motion, and energy equations are written as
where u and v are the corresponding velocities in x- and y-directions, respectively. is the kinematic fluid viscosity, is the fluid density, and is the Casson viscosity coefficient. is the Casson fluid parameter. is the electrical conductivity of the Casson fluid. denotes the magnetic field, where is the constant magnetic field, and L is the characteristic length. is the thermal diffusivity, where is the fluid thermal conductivity and is the specific heat. The boundary conditions of governing Equations (1)–(3) are given by
where is shrinking constant, is a constant with for masss suction, is a constant measuring the uniform increase in temperature along the shrinking sheet.
The governing Equations (1)–(3) are nonlinear partial differential equations. In order to obtain the self-similar equations, we use the similarity transformation reported by Refs. [15,32], and thus Equations (1)–(3) are reduced to the nonlinear ordinary differential equations
with boundary conditions
where the prime denotes the differentiation with respect to , given by , is related to the stream function by , , is the magnetic interaction parameter, is the Prandtl number, and is the suction parameter.
The related skin friction coefficient and local Nusselt number are given by using the similarity variables
where is the local Reynolds number.
3. Explicit Solutions
For the current problem, considering the convenience of calculation and obtaining the convergent solution [28], we first introduce a spatial scale factor to transform Equations (8) and (9) into
by the transformation , , and . The corresponding boundary conditions (10) become
In the framework of HAM, a nonlinear problem is transformed into an infinite number of linear sub-problems. According to Equations (13)–(15), and should hold the following “solution expressions” form
where and are constant coefficients to be determined by HAM. The solution expressions (16)–(17) guide us to choose the following auxiliary linear operator
with the properties
where , , , and are constants. Considering Equations (15)–(17), the following initial guesses are chosen
Then, according to Equations (13) and (14), we construct a family of zeroth-order deformation equations
with boundary conditions
where is an embedding parameter, and and are two non-zero convergence-control parameters. When , we have the solution
and at , Equations (24)–(26) are the same as Equations (13)–(15), respectively, so that
It is clear that the embedding parameter q plays the role of mapping. In other words, when q gradually increases from 0 to 1, this mapping ensures and continuously deform from the initial guesses and to the exact solutions and , respectively.
For this direct mapping, we express and in Maclaurin series
respectively. Note that the convergence of the above series is related to the two auxiliary linear operators , , and convergence-control parameters , . Fortunately, the HAM method allows us to choose them freely. This point is different from other analytic methods, due to the absence of physical meaning regarding the convergence-control parameter. If all of them are properly selected, we obtain via Equation (28) that
where is a sufficiently large truncation number and denotes th-order approximation. and () are calculated from the corresponding governing equations
with the boundary conditions
where the right-hand terms and are derived by substituting Equations (29) and (30) into Equations (24)–(26) and equalizing the like-powers of q. is defined by
It should be emphasized that Equations (33) and (34) are linear. Thus, first considering the initial guesses (22)–(23), then , , …, and , , …, can be calculated by solving these linear equations. Interestingly, we can now find the structures of and under each mth-order approximation. Then the recurrence formulas regarding the coefficients of Equation (16) and of Equation (17) are deduced through a lengthy derivation process. For details, please refer to the process in [28]. Here, we list the explicit recurrence formulas of in Equation (16) and in Equation (17).
3.1. and
The coefficients in Equation (16) are as follows:
and for , and ,
for , please refer to Appendix A for and mentioned in above formulas.
Therefore, owing to the transformation , , we obtain the explicit analytic solution of
3.2. and
The coefficients in Equation (17) are as follows:
for , the details of and are listed in Appendix B.
Similarly, the explicit expression of is gained
Using all of the above recurrence formulas, the coefficients and are easily calculated in turn. It is worth emphasizing that the series solutions (46) and (54) are convergent as long as the convergence-control parameters are properly selected. Thus, one can gain accurate results under different values of , M, and s.
In particular, the total averaged value of the squared residual error in the governing equations [19] is evaluated by substituting the th-order approximations (46) and (54) into the original governing Equations (8) and (9), respectively. The squared residual error clearly indicates the accuracy of the analytic approximations (46)–(54). It is crucial to guarantee the convergence of an approximation series. As Liao [19] reported, the series approximations contain the convergence-control parameters and . Thus, the squared residual errors also contain and . The proper values of and can always be found to guarantee the convergence of the homotopy series owing to the great freedom. Obviously, at the given order of approximation , the optimal approximation is defined by minimizing the squared residual error with the corresponding optimal convergence-control parameters and , respectively.
4. Convergence Test
Physically, the values of and are of great significance. They are related to the skin friction coefficient (11) and the local Nusselt number (12), respectively. In this section, we first give the analytical formulas of and and then test their convergence.
Through the use of Equations (46) and (54), the th-order approximation of and are derived
where is defined by Equation (A14), and reads
To reveal the accuracy and superiority of the series solution, let us first consider the case with different values of the suction parameter s, which has the convergent series solution of and . As shown in Figure 2, the convergent values of and obtained by HAM agree quite well with the numerical results [33]. Without the loss of generality, we further investigate the changes of skin friction and Nusselt number with various values of Casson fluid parameter , as shown in Figure 3. The convergent values of and are in good agreement with the corresponding numerical results in a region of . All of these cases indicate that the analytic formulas of and (55)–(56) are valid, so that one can obtain a sufficiently accurate approximation by means of the optimal convergence-control parameters. Moreover, according to Figure 2, it is seen that both the skin friction and the Nusselt number increase linearly with an increase in s. However, the influence of is relatively weak, , , and increase slowly and nonlinearly with respect to .
Furthermore, we would like to emphasize two points. It is known that the HAM method bears superiority over other analytical/semi-analytical methods. Firstly, HAM can ensure the convergence accuracy of nonlinear problems, even in those with strong nonlinearity. A comparison of and with the corresponding numerical values for various values of M, , s is illustrated in Table 1. Note that our convergent results are sufficiently accurate with high decimal precision, especially for large values of M, , s. HAM remains independent of small/large physical parameters and provides a convenient way to control the convergence of homotopy series solutions even for large disturbances, which distinguishes it from all other analytic techniques. Secondly, the homotopy approximation quickly converges with the optimal convergence-control parameters chosen. As shown in Figure 4, the total average residual error decreases sharply for each case as the order of approximation increases. Notice that, using the optimal convergence-control parameters , , results in a convergence speed faster than that using non-optimal values, such as , for . The proper convergence-control parameters guarantee the convergence of the homotopy series solution. Furthermore, it is worth noting that other analytic techniques cannot guarantee the same. Thus, this demonstrates an obvious advantage of using HAM. In practice, the sufficiently accurate approximations are obtained in far fewer terms by the optimal convergence-control parameters.
5. Discussions
The explicit solutions of the velocity and temperature distribution (46)–(54) are obtained in Section 3, and are valid in the whole domain . Therefore, according to the explicit solutions, one can investigate the influence of physical quantities, such as Casson fluid parameter , magnetic interaction parameter M, suction parameter s and Prandtl number on the velocity and temperature profiles, skin friction coefficient and local Nusselt number .
5.1. Effect of
First, we investigate the effects of Casson fluid parameter on the velocity profile and temperature profile. As shown in Figure 5, the magnitude of decreases as increases. The thickness of the velocity boundary layer decreases with increases in . This is because the yield stress decreases as increases, which results in the velocity being suppressed. It is observed that when approaches infinity, the problem in the given case reduces to a Newtonian case. We emphasize that the effect of on the velocity profile in this study is consistent with the Casson fluid flow along an exponentially stretching surface [34]. Whether in regard to a stretching or shrinking surface, the magnitude of velocity is found to decrease with increasing . The decreasing nature of the momentum boundary layer thickness with increasing appears accordingly. This relationship is reasonable in non-Newtonian fluids because an increase in yield stress suppresses the velocity in the boundary layer.
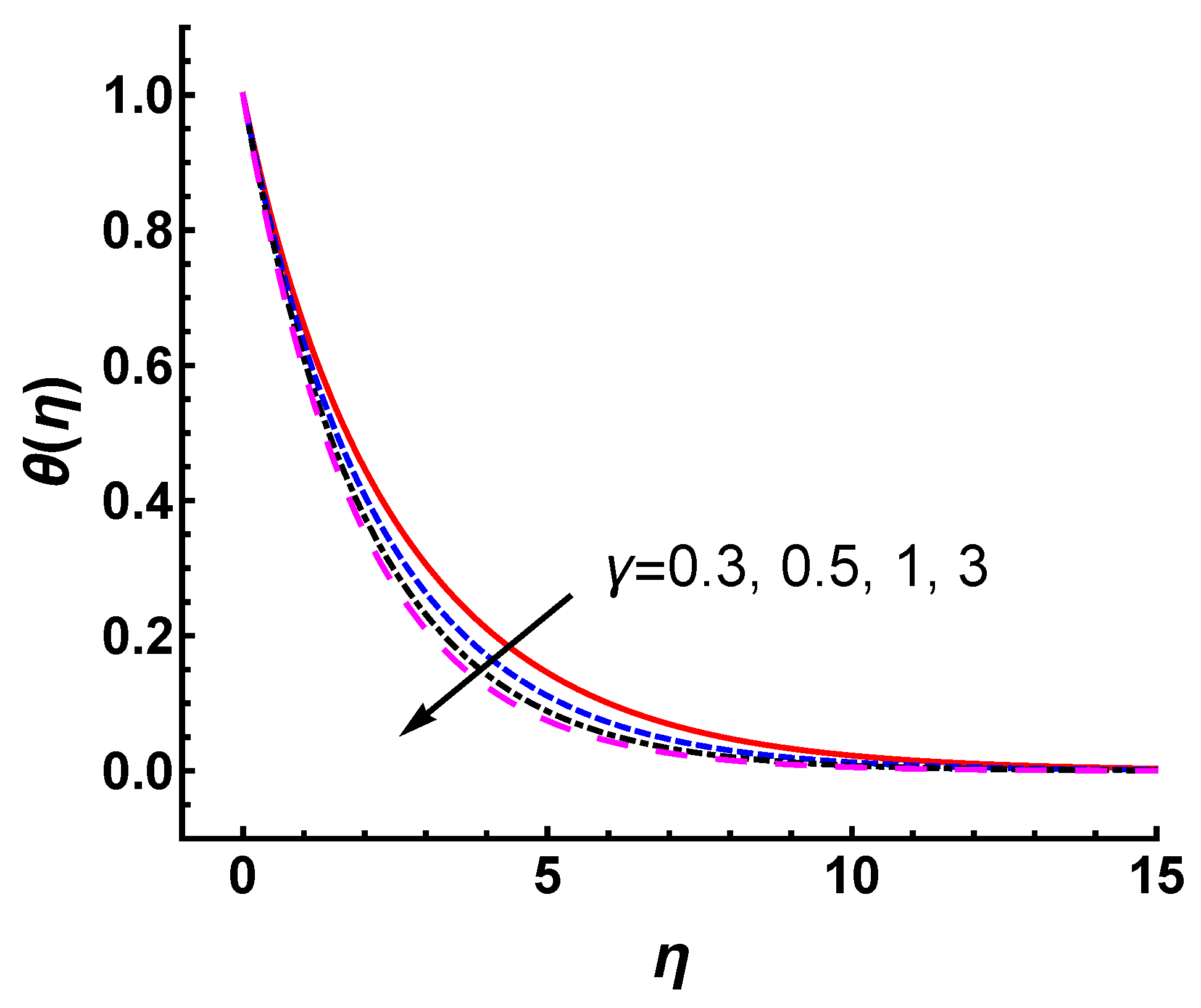
Figure 6 shows the effect of on the temperature profile in the cases of , and . It can be seen that the temperature decreases slightly with the increasing values of . Hence, the thermal boundary layer thickness decreases as the increases. Here, we would like to illustrate a point regarding the wall temperature . Note that given by Equation (6) in this study is a uniformly distributed constant. The temperature field given by constant is much more suppressed in the same value of than that of the wall temperature condition increasing exponentially with x given by . Figure 7 exhibits the temperature profiles for constant and exponentially increased in the cases of , , and , respectively. It is observed that the temperature increases for under the same parameters. Physically, as the wall temperature increases, the temperature of flow within the boundary layer increases. This causes an increase in the thermal boundary layer thickness.
5.2. Effects of M and s
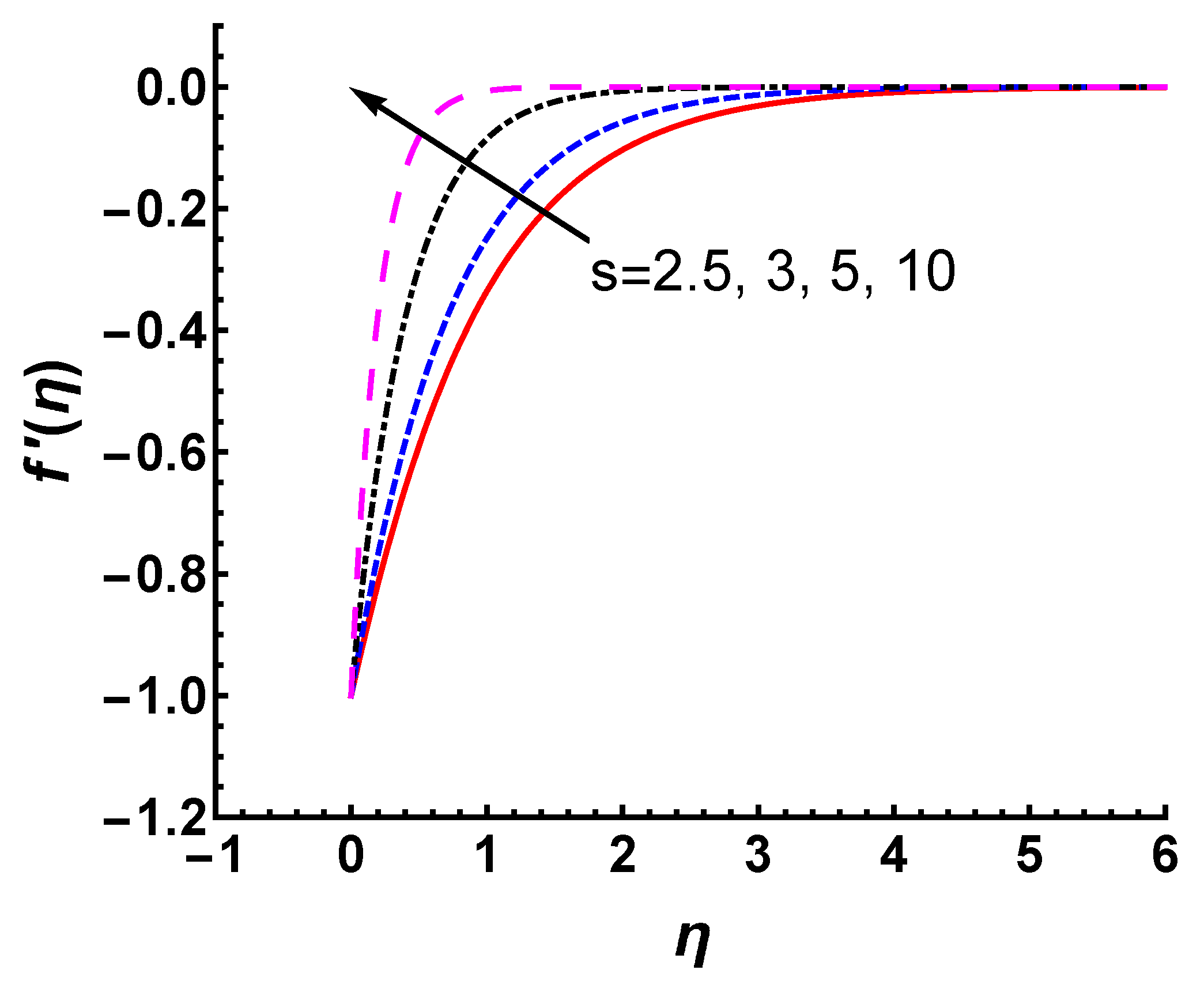
The curves of versus M and s are shown in Figure 8 and Figure 9, respectively. It is noticed that the magnitude of velocity profiles shows an appreciable decrease for large values of M and s. From Figure 8, the magnitude of velocity in the boundary layer is suppressed as M increases because the force of the magnetic field opposes the motion of the fluid. As shown in Figure 9, the magnitude of velocity decreases significantly with increasing mass suction, which causes a decrease in the boundary layer thickness. This phenomenon can be explained physically. The heated fluid is sucked closer to the wall as the mass suction becomes stronger, where the flow is slowed down due to the greater influence of viscosity. This effect suppresses the maximum velocity in the boundary layer. Therefore, an increased s leads to a faster reduction in the magnitude of velocity.
Figure 10 and Figure 11 show the effects of M and s on the temperature profile . Figure 10 depicts the features of temperature profile as a function of for various M. As M increases, the thermal temperature thickness becomes slightly thinner, and is not so sensitive to M. The convergent analytic approximation for , 3, 5 and 10 is shown in Figure 11. The increase in s obviously reduces the temperature profile. This change is quite significant due to the increase of mass suction. Compared with M, s has a greater impact on thermal distribution. Meanwhile, obtained by HAM matches the numerical ones quite well for each case, as shown in Figure 11.
M and s show similar effects on temperature and velocity. Due to the applied magnetic field and suction, the velocity and temperature distributions become more uniform within the boundary layer. The presence of a magnetic field force opposite to the velocity direction and suction tends to reduce the momentum and thermal thickness of the boundary layer. This shows the effect of decreasing both the velocity and temperature within the boundary layer.
Additionally, similar to the analysis in , we compare the temperature profile for different wall temperature conditions in the cases of and (see Figure 12). It is observed that the temperature profile caused by decreases faster than that caused by under the same parameters. The exponentially increasing wall temperature with x raises the temperature of the fluid within the boundary layer and increases the thermal boundary layer thickness.
5.3. Effect of
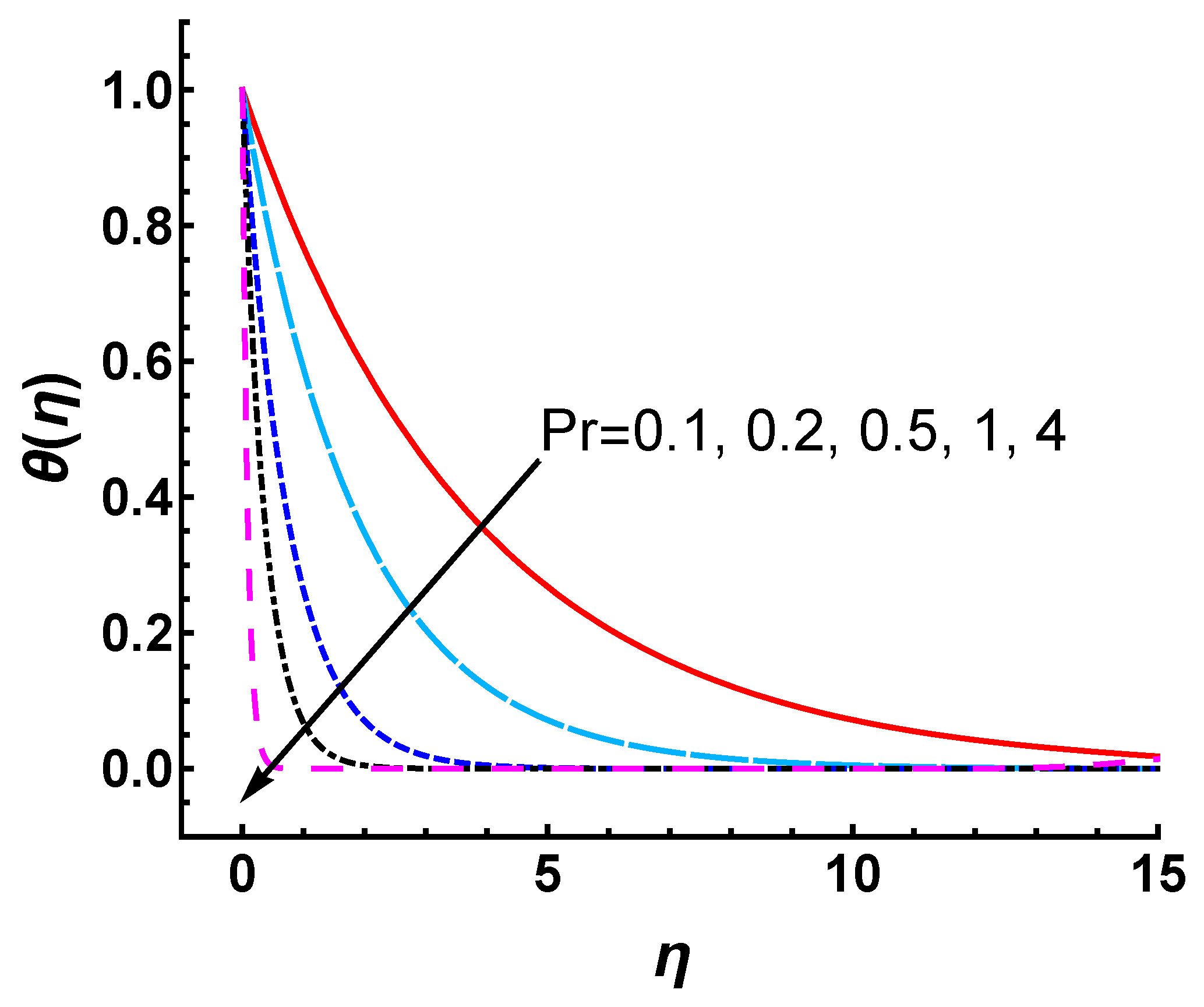
Notice that since the Prandtl number is closely related to the temperature of the boundary layer, we study the influences of on the temperature profile . As shown in Figure 13, the temperature profile decreases with the increasing values of . The thermal boundary layer thickness is reduced with an increase in . Since signifies the ratio of momentum diffusivity to thermal diffusivity, the thickness of momentum and thermal boundary layers can be controlled using . The heat diffuses faster than the momentum for a small value of . Therefore, the thermal boundary layer is thicker than that of the momentum boundary layer. In other words, higher thermal conductivity corresponds to a thicker thermal boundary layer. Therefore, it is observed from Figure 13 that the heat diffuses slowly and the thermal boundary layer becomes thinner as increases.
5.4. Analysis of and
The effects of s and on skin friction and Nusselt number are investigated by the explicit solutions of and in Section 4. Figure 2 illustrates that an increase in s leads to a linear increase in and linear decrease in . According to Equations (11) and (12), and exhibit a linearly increasing trend as s increases. However, and are nonlinear functions of (see Figure 3). Note that , and increase slowly with an increase in . As increases to infinity, a Newtonian case appears.
In addition, the comparison of the present results corresponding to and with numerical solutions for various values of M, and s is presented in Table 1. It shows the high accuracy of the applied scheme and verifies the effectiveness of the HAM approach. From Table 1, it is seen that the influence of M on and is similar to . An increment in M causes and to increase slowly. The same is true for the trend of and due to Equations (11) and (12).
Figure 14 displays the wall temperature gradient against . It is clearly shown that the increment in leads to a linear increase in the wall temperature gradient. The wall temperature gradient is proportional to the heat transfer rate or . As mentioned earlier, represents the ratio of momentum diffusivity to thermal diffusivity. The momentum diffusivity increases, whereas thermal diffusivity decreases as increases, so the heat transfer rate increases. This reflects that the Nusselt number increases with the increasing values of . Significantly, the heat transfer rate under the condition of an exponentially increasing wall temperature is lower than that under a constant wall temperature. As can be observed from Table 2, the convergent solution is reduced by increasing the wall temperature along the x-direction. This means that the temperature profile within the boundary layer enhances, which causes an increase in thermal boundary layer thickness.
Finally, it should be emphasized that our series solutions are sufficiently accurate by comparison with the numerical results. In addition, as observed in Figure 4, the squared residual error of the homotopy approximations decreases exponentially as the order of approximation increases. Thus, it is in fact unnecessary to compare our convergent results with numerical ones. The variation of the squared residual error evaluates the accuracy of the homotopy approximation.
6. Conclusions
The MHD flow and heat transfer of a Casson fluid over an exponentially shrinking sheet with suction is investigated using the HAM approach. First, the governing boundary layer equations are transformed into nonlinear ordinary differential equations using similarity transformations. Then, the nonlinear ordinary differential governing Equations (8) and (9) are replaced utilizing an infinite number of linear sub-equations, which are solved analytically in the whole domain. Due to the freedom in constructing the zeroth-order deformation equations, we can choose the appropriate initial guesses and the auxiliary linear operators so that the explicit solutions are derived further. The generosity in freedom is based on the concept of convergence-control by means of convergence-control parameters. The optimal values of the convergence-control parameters are strongly suggested for use in practice. In general, it is enough to obtain an accurate homotopy approximation by using optimal convergence-control parameters determined by the minimum of the squared residual error corresponding to the governing equations.
In this study, by solving the coupled nonlinear differential equations in the MHD flow and heat transfer of a Casson fluid over an exponentially shrinking sheet, we arrive at the following main points:
- The explicit analytic solutions of and are obtained and valid in the whole region .
- The important quantities and related to the skin friction coefficient and local Nusselt number are derived in an explicit form.
- The convergent analytic solutions are in good agreement with the numerical solutions. The rapid decrease in squared residual error ensures the accuracy of the homotopy approximation.
- An increase in the Casson fluid parameter suppresses the magnitude of velocity profile due to the reduced yield stress as increases. This leads to a thinner momentum boundary layer thickness. The velocity profile magnitude is found to decrease with increasing for both stretching and shrinking surfaces.
- The temperature profile decreases slightly with increasing values of in the current case, which decreases the thermal boundary layer thickness.
- The magnitudes of and decrease significantly with increases in the magnetic interaction parameter M and suction parameter s.
- The velocity and thermal boundary layer thicknesses decrease as M and s increase. The presence of a magnetic field force opposite to the velocity and suction reduces the momentum and thermal thickness of the boundary layer.
- The temperature profile and thermal boundary layer thickness decrease with increasing values of Prandtl number . The heat diffuses faster corresponding to the higher thermal conductivity for a small value of .
- and exhibit a linearly increasing trend as s becomes stronger.
- and increase nonlinearly with increases in and M.
- The wall heat transfer rate increases linearly as increases, as a result, also increases linearly.
- Compared with the constant wall temperature condition, the exponentially increasing wall temperature with x raises the temperature of the fluid within the boundary layer and leads to increased thickness of the thermal boundary layer.
Author Contributions
Conceptualization, L.L., J.L. and S.L.; methodology, L.L., J.L. and S.L.; software, L.L.; validation, L.L., J.L. and S.L.; formal analysis, L.L., J.L.; writing—original draft preparation, L.L.; writing—review and editing, L.L., J.L. and S.L.; visualization, L.L., J.L.; supervision, J.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China, grant number 12002206; 91752104.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented are available in this article.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A. The Related Coefficients in
(1) is defined by
where
in which
and for , ,
in which
and
and
where , , are shown in Equations (A13), .
Appendix B. The Related Coefficients in
References
- Ryutova, M.; Tarbell, T. MHD Shocks and the Origin of the Solar Transition Region. Phys. Rev. Lett. 2003, 90, 191101. [Google Scholar] [CrossRef] [PubMed]
- Takahashi, R.; Brennan, D.P.; Kim, C.C. Kinetic Effects of Energetic Particles on Resistive MHD Stability. Phys. Rev. Lett. 2009, 102, 135001. [Google Scholar] [CrossRef]
- Stawarz, J.E.; Pouquet, A. Small-scale behavior of Hall magnetohydrodynamic turbulence. Phys. Rev. E 2015, 92, 063102. [Google Scholar] [CrossRef] [PubMed]
- Miura, H.; Yang, J.G.; Gotoh, T. Hall magnetohydrodynamic turbulence with a magnetic Prandtl number larger than unity. Phys. Rev. E 2019, 100, 063207. [Google Scholar] [CrossRef] [PubMed]
- Klein, R.; Pothérat, A. Appearance of Three Dimensionality in Wall-Bounded MHD Flows. Phys. Rev. Lett. 2010, 104, 034502. [Google Scholar] [CrossRef] [PubMed]
- Reddy, K.S.; Fauve, S.; Gissinger, C. Instabilities of MHD flows driven by traveling magnetic fields. Phys. Rev. Fluids 2018, 3, 063703. [Google Scholar] [CrossRef]
- Camobreco, C.J.; Pothérat, A.; Sheard, G.J. Transition to turbulence in quasi-two-dimensional MHD flow driven by lateral walls. Phys. Rev. Fluids 2021, 6, 013901. [Google Scholar] [CrossRef]
- Mukhopadhyay, S.; Layek, G.C.; Samad, S.A. Study of MHD boundary layer flow over a heated stretching sheet with variable viscosity. Int. J. Heat Mass Transf. 2005, 48, 4460–4466. [Google Scholar] [CrossRef]
- Kerrache, N.; Bouaziz, M.N. Suction/injection effects on MHD free convection boundary flow in a darciam-forchheimer porous medium. Adv. Appl. Fluid Mech. 2017, 20, 561–578. [Google Scholar]
- Saadatmandi, A.; Sanatkar, Z. Collocation method based on rational Legendre functions for solving the magneto-hydrodynamic flow over a nonlinear stretching sheet. Appl. Math. Comput. 2018, 323, 193–203. [Google Scholar] [CrossRef]
- Ponalagusamy, R.; Priyadharshini, S. Pulsatile MHD flow of a Casson fluid through a porous bifurcated arterial stenosis under periodic body acceleration. Appl. Math. Comput. 2018, 333, 325–343. [Google Scholar] [CrossRef]
- Asifa, P.K.; Shah, Z.; Watthayu, W.; Anwar, T. Radiative MHD unsteady Casson fluid flow with heat source/sink through a vertical channel suspended in porous medium subject to generalized boundary conditions. Phys. Scr. 2021, 96, 075213. [Google Scholar] [CrossRef]
- Kumar, M.; Mondal, P.K. Bejan’s flow visualization of buoyancy-driven flow of a hydromagnetic Casson fluid from an isothermal wavy surface. Phys. Fluids 2021, 33, 093113. [Google Scholar] [CrossRef]
- Kandelousi, M.S.; Ameen, S.; Akhtar, M.S.; Shin, H.S. Nanofluid Flow in Porous Media; IntechOpen: London, UK, 2020. [Google Scholar]
- Nadeema, S.; Haqa, R.U.; Lee, C. MHD flow of a Casson fluid over an exponentially shrinking sheet. Sci. Iran. B 2012, 19, 1550–1553. [Google Scholar] [CrossRef]
- Liao, S. The Proposed Homotopy Analysis Technique for the Solution of Nonlinear Problems. Ph.D. Thesis, Shanghai Jiao Tong University, Shanghai, China, 1992. [Google Scholar]
- Liao, S. Beyond Perturbation: Introduction to the Homotopy Analysis Method; Chapman and Hall/CRC: New York, NY, USA, 2003. [Google Scholar]
- Liao, S. Notes on the homotopy analysis method: Some definitions and theorems. Commun. Nonlinear Ence Numer. Simul. 2009, 14, 983–997. [Google Scholar] [CrossRef]
- Liao, S. Homotopy Analysis Method in Nonlinear Differential Equations; Springer-Verlag GmbH: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Vajravelu, K.; Van Gorder, R.A. Nonlinear Flow Phenomena and Homotopy Analysis: Fluid Flow and Heat Transfer; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Yu, Q. Wavelet-based homotopy method for analysis of nonlinear bending of variable-thickness plate on elastic foundations. Thin-Walled Struct. 2020, 157, 107105. [Google Scholar] [CrossRef]
- Ramzan, M.; Bilal, M.; Chung, J.D.; Lu, D.C.; Farooq, U. Impact of generalized Fourier’s and Fick’s laws on MHD 3D second grade nanofluid flow with variable thermalconductivity and convective heat and mass conditions. Phys. Fluids 2017, 29, 093102. [Google Scholar] [CrossRef]
- Xu, D.L.; Liu, Z. A study on nonlinear steady-state waves at resonance in water of finite depth by the amplitude-based Homotopy Analysis Method. J. Hydrodyn. 2020, 32, 888–900. [Google Scholar] [CrossRef]
- Liu, L.; Rana, J.; Liao, S. Analytical solutions for the hydrogen atom in plasmas with electric, magnetic, and Aharonov-Bohm flux fields. Phys. Rev. E 2021, 103, 023206. [Google Scholar] [CrossRef]
- Yang, X.Y.; Li, Y. On bi-chromatic steady-state gravity waves with an arbitrary included angle. Phys. Fluids 2022, 34, 032107. [Google Scholar] [CrossRef]
- Sardanyés, J.; Rodrigues, C.; Januário, C.; Martins, N.; Gil-Gómez, G.; Duarte, J. Activation of effector immune cells promotes tumor stochastic extinction: A homotopy analysis approach. Appl. Math. Comput. 2015, 252, 484–495. [Google Scholar] [CrossRef] [Green Version]
- Nassar, C.J.; Revelli, J.F.; Bowman, R.J. Application of the homotopy analysis method to the Poisson-Boltzmann equation for semiconductor devices. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 2501–2512. [Google Scholar] [CrossRef]
- Liao, S.J. An explicit, totally analytic approximate solution for Blasius’ viscous flow problems. Int. J. Non Linear Mech. 1999, 34, 759–778. [Google Scholar] [CrossRef]
- Farooq, U.; Zhao, Y.L.; Hayat, T.; Alsaedi, A.; Liao, S.J. Application of the HAM-based Mathematica package BVPh 2.0 on MHD Falkner–Skan flow of nano-fluid. Comput. Fluids 2015, 111, 69–75. [Google Scholar] [CrossRef]
- Mustafa, M.; Hayat, T.; Pop, I.; Hendi, A. Stagnation-Point Flow and Heat Transfer of a Casson Fluid towards a Stretching Sheet. Z. Naturforschung A 2015, 67, 70–76. [Google Scholar] [CrossRef]
- Ali, A.; Zaman, H.; Abidin, M.Z.; Naeemullah; Shah, S.I.A. Analytic Solution for Fluid Flow over an Exponentially Stretching Porous Sheet with Surface Heat Flux in Porous Medium by Means of Homotopy Analysis Method. Am. J. Comput. Math. 2015, 5, 224–238. [Google Scholar] [CrossRef]
- Bhattacharyya, K. Boundary Layer Flow and Heat Transfer over an Exponentially Shrinking Sheet. Chin. Phys. Lett. 2011, 28, 074701. [Google Scholar] [CrossRef]
- Kierzenka, J.; Shampine, L.F. A BVP Solver Based on Residual Control and the Matlab PSE. ACM Trans. Math. Softw. 2001, 27, 299. [Google Scholar] [CrossRef]
- Pramanik, S. Casson fluid flow and heat transfer past an exponentially porous stretching surface in presence of thermal radiation. Ain Shams Eng. J. 2014, 5, 205–212. [Google Scholar] [CrossRef] [Green Version]
Figure 1.
Physical model and coordinate system.

Figure 2.
Comparison of convergent series solutions of and obtained by HAM with the numerical results for different values of suction parameter s when , . Solid line: convergent series solutions of ; dashed line: convergent series solutions of ; circles: corresponding numerical results.
Figure 2.
Comparison of convergent series solutions of and obtained by HAM with the numerical results for different values of suction parameter s when , . Solid line: convergent series solutions of ; dashed line: convergent series solutions of ; circles: corresponding numerical results.

Figure 3.
Comparison of convergent series solutions of () and () obtained by HAM with the numerical results for different values of Casson fluid parameter when , , . Line: convergent series solutions; symbols: corresponding numerical results.
Figure 3.
Comparison of convergent series solutions of () and () obtained by HAM with the numerical results for different values of Casson fluid parameter when , , . Line: convergent series solutions; symbols: corresponding numerical results.

Figure 4.
Total average residual error of Equations (8) and (9) in cases of and for , , at different orders of approximation given by HAM using non-optimal , (for ), optimal , (for ) and optimal , (for ), respectively.

Figure 5.
Velocity profile for different values of with , and .

Figure 6.
Temperature profile for different values of with , and .

Figure 7.
Temperature profile for different wall temperature conditions in the cases of , , and . Long-dashed line: ; solid line: .
Figure 7.
Temperature profile for different wall temperature conditions in the cases of , , and . Long-dashed line: ; solid line: .

Figure 8.
Velocity profile for different values of M with , and .

Figure 9.
Velocity profile for different values of s with and .

Figure 10.
Influence of M parameter on temperature profile with , , ; line: HAM results, marker: numerical results.
Figure 10.
Influence of M parameter on temperature profile with , , ; line: HAM results, marker: numerical results.

Figure 11.
Influence of s parameter on temperature profile with , ; line: HAM results, marker: numerical results.
Figure 11.
Influence of s parameter on temperature profile with , ; line: HAM results, marker: numerical results.

Figure 12.
Temperature profile for different wall temperature conditions in the cases of (, , ) and (, ), respectively. Long-dashed line: , ; dot-dashed line: , ; short-dashed line: , ; solid line: , .
Figure 12.
Temperature profile for different wall temperature conditions in the cases of (, , ) and (, ), respectively. Long-dashed line: , ; dot-dashed line: , ; short-dashed line: , ; solid line: , .

Figure 13.
Influence of on temperature profile obtained by HAM with .

Figure 14.
Influence of on obtained by HAM with .


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Analytic approximations (HAM) of , compared with numerical results for various M, and s in case of .
Table 1.
Analytic approximations (HAM) of , compared with numerical results for various M, and s in case of .
| Parameters | |||||
|---|---|---|---|---|---|
| HAM | Num | HAM | Num | ||
| M | 2 | 1.18455279 | 1.184553 | −1.10536254 | −1.105533 |
| 3 | 1.47878566 | 1.478786 | −1.14720967 | −1.147279 | |
| 5 | 1.89590282 | 1.895903 | −1.18877394 | −1.188803 | |
| 10 | 2.60700267 | 2.607003 | −1.23492995 | −1.234942 | |
| 1 | 0.61356181 | 0.613026 | −0.94909557 | −0.944217 | |
| 3 | 1.18865714 | 1.188657 | −1.11302087 | −1.113159 | |
| 5 | 1.36433170 | 1.364332 | −1.13918925 | −1.139268 | |
| 10 | 1.52194504 | 1.521945 | −1.15851866 | −1.158571 | |
| s | 2.5 | 1.00391561 | 1.003915 | −1.48397701 | −1.483987 |
| 3 | 1.31012112 | 1.310121 | −1.90669518 | −1.906695 | |
| 5 | 2.39570505 | 2.395705 | −3.42764833 | −3.427648 | |
| 10 | 4.94949146 | 4.949491 | −7.04073641 | −7.040736 | |
Table 2.
Analytic approximations (HAM) of under different wall temperature conditions for various with .
Table 2.
Analytic approximations (HAM) of under different wall temperature conditions for various with .
| Parameters | |||
|---|---|---|---|
| 0.1 | 0.2664 | 0.23258 | |
| 0.2 | 0.53845 | 0.47562 | |
| 0.5 | 1.37692 | 1.24919 | |
| 1 | 2.81671 | 2.62471 | |
| 4 | 11.71837 | 11.42673 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Liu, L.; Li, J.; Liao, S. Explicit Solutions of MHD Flow and Heat Transfer of Casson Fluid over an Exponentially Shrinking Sheet with Suction. Nanomaterials 2022, 12, 3289. https://doi.org/10.3390/nano12193289
AMA Style
Liu L, Li J, Liao S. Explicit Solutions of MHD Flow and Heat Transfer of Casson Fluid over an Exponentially Shrinking Sheet with Suction. Nanomaterials. 2022; 12(19):3289. https://doi.org/10.3390/nano12193289
Chicago/Turabian StyleLiu, Ling, Jing Li, and Shijun Liao. 2022. "Explicit Solutions of MHD Flow and Heat Transfer of Casson Fluid over an Exponentially Shrinking Sheet with Suction" Nanomaterials 12, no. 19: 3289. https://doi.org/10.3390/nano12193289
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.