
Liquid-Infused Microgrooved Slippery Surface Ablated by One-Step Laser Irradiation for Underwater Bubble Directional Manipulation and Anisotropic Spreading


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
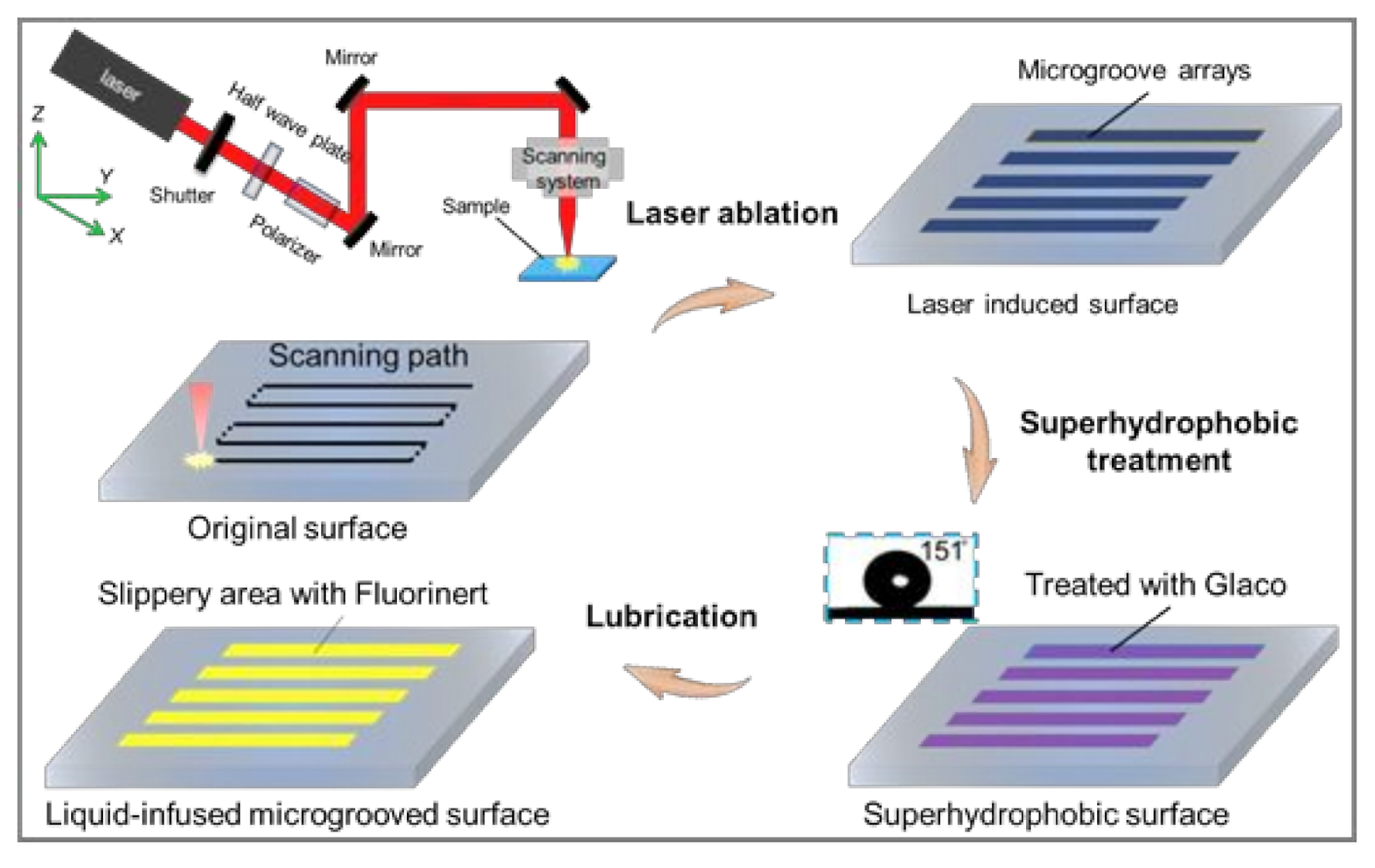
2. Materials, Methods and Fabrication Process
3. Results
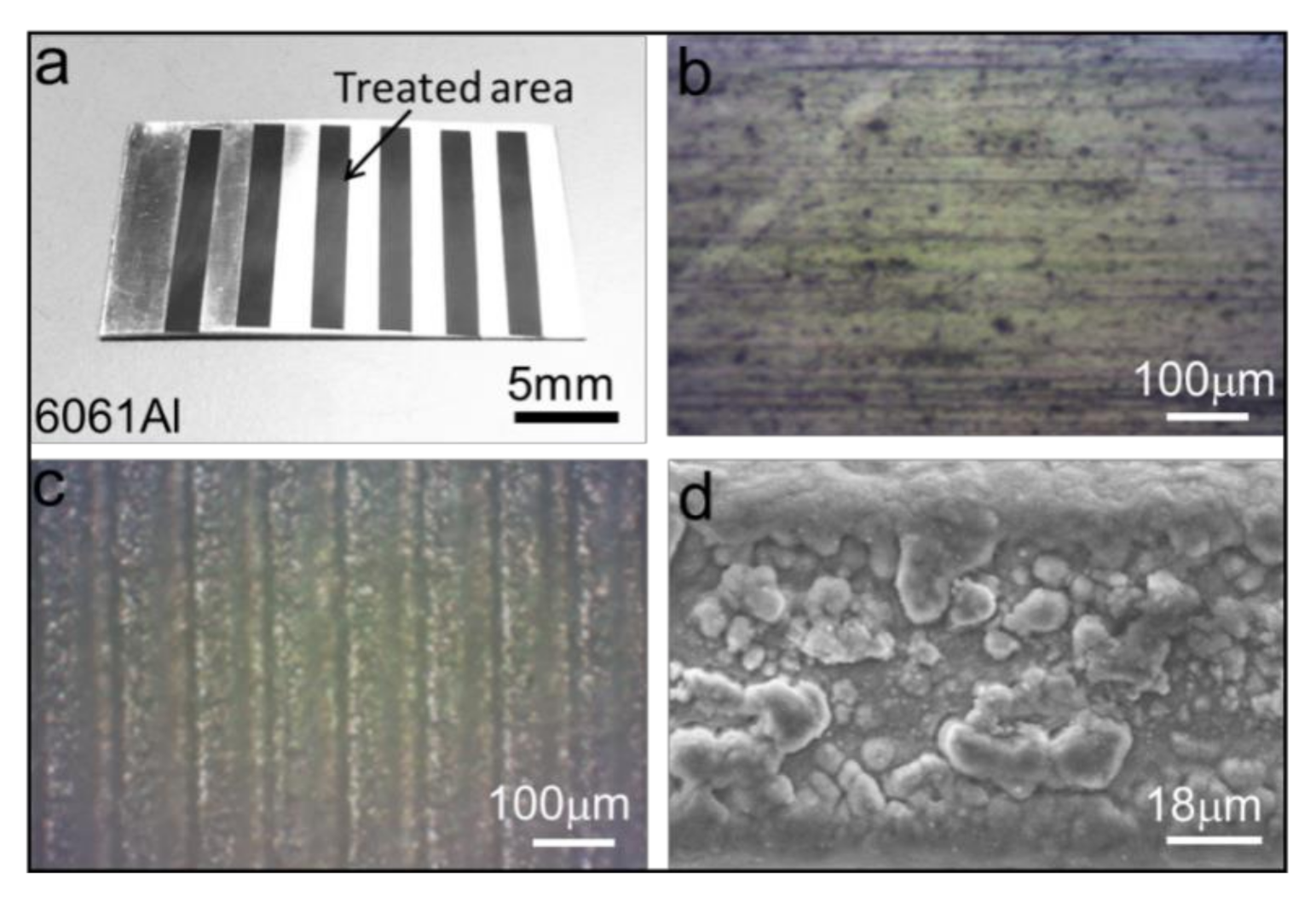
3.1. Surface Topography of the Laser-Ablated Sample
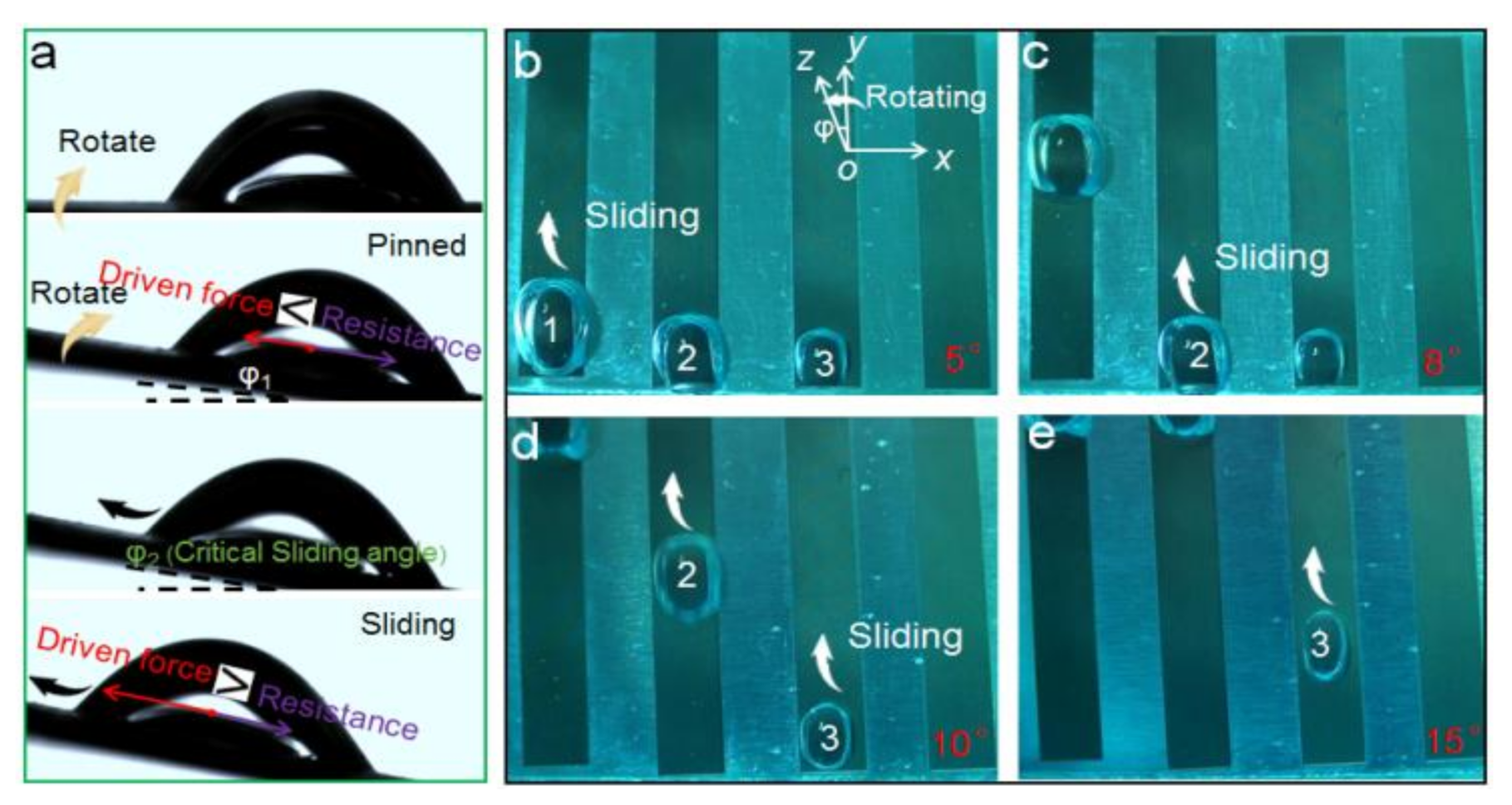
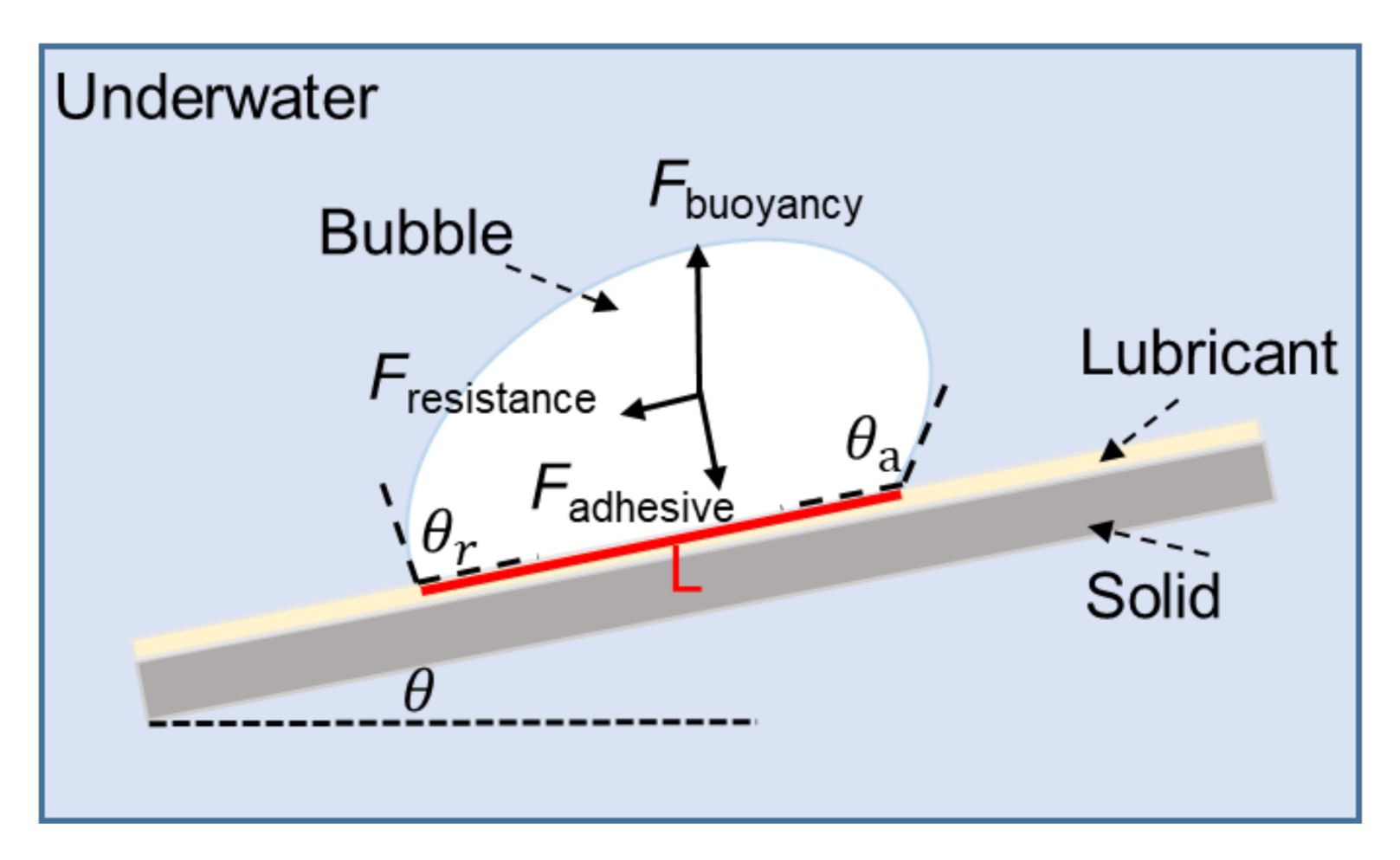
3.2. The Mechanism of Bubble Directional Transmission on the Slippery Surface during the Fabrication of LIAMSS
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Baffou, G.; Quidant, R. Nanoplasmonics for chemistry. Chem. Soc. Rev. 2014, 43, 3898–3907. [Google Scholar] [CrossRef] [PubMed]
- Lukianova-Hleb, E.Y.; Belyanin, A.; Kashinath, S.; Wu, X.; Lapotko, D.O. Plasmonic nanobubble-enhanced endosomal escape processes for selective and guided intracellular delivery of chemotherapy to drug-resistant cancer cells. Biomaterials 2012, 33, 1821–1826. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ma, H.; Cao, M.; Zhang, C.; Bei, Z.; Li, K.; Yu, C.; Jiang, L. Directional and Continuous Transport of Gas Bubbles on Su-peraerophilic Geometry-Gradient Surfaces in Aqueous Environments. Adv. Funct. Mater. 2018, 28, 76–82. [Google Scholar] [CrossRef]
- Gunten, U.V. Ozonation of drinking water: Part II. Disinfection and by-product formation in presence of bromide, io-dide or chlorine. Water Res. 2003, 37, 1469–1487. [Google Scholar] [CrossRef]
- Jiao, Y.; Li, C.; Wu, S.; Hu, Y.; Li, J.; Yang, L.; Wu, D.; Chu, J. Switchable Underwater Bubble Wettability on Laser-Induced Titanium Multiscale Micro-/Nanostructures by Vertically Crossed Scanning. ACS Appl. Mater. Interfaces 2018, 10, 16867–16873. [Google Scholar] [CrossRef] [PubMed]
- Xia, Z.R.; Hu, L.M. Treament of organics contaminated wastewater by ozone micro-nano-bubbles. Water 2019, 11, 55. [Google Scholar] [CrossRef] [Green Version]
- Gylys, J.; Zdankus, T.; Gylys, M. Experimental investigation of heat transfer from inclined flat surface to aqueous foam. Int. J. Heat Mass Transf. 2014, 69, 230–236. [Google Scholar] [CrossRef]
- Yang, J.; Li, Y.; Zu, L.; Tong, L.; Liu, G.; Qin, Y.; Shi, D. Light-Concentrating Plasmonic Au Superstructures with Signifi-cantly Visible-Light-Enhanced Catalytic Performance. ACS Appl. Mater. Interfaces 2015, 7, 8200–8208. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Cao, M.; Ma, H.; Yu, C.; Li, K.; Yu, C.; Jiang, L. Morphology-Control Strategy of the Superhydrophobic Poly(Methyl Methacrylate) Surface for Efficient Bubble Adhesion and Wastewater Remediation. Adv. Funct. Mater. 2017, 27, 1702020. [Google Scholar] [CrossRef]
- Zhang, P.; Zhang, J.; Xue, Z.; Wang, J.; Jiang, L. Reliable manipulation of gas bubbles by regulating interfacial morpholo-gies and chemical components. Mater. Horiz. 2015, 4, 665–672. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, B.; Ma, H.; Li, Z.; Xiao, X.; Zhang, Y.; Cui, X.; Yu, C.; Cao, M.; Jiang, L. Bioinspired Pressure-Tolera Asymmetric Slippery Surface for Continuous Self-Transport of Gas Bubbles in Aqueous Environment. ACS Nano 2018, 12, 2048–2055. [Google Scholar] [CrossRef]
- Chen, C.; Huang, Z.; Shi, L.; Jiao, Y.; Zhu, S.; Li, J.; Hu, Y.; Chu, J.; Wu, D.; Jiang, L. Remote photothermal actuation of un-derwater bubble towards arbitrary direction on planar slippery Fe3O4-doped surfaces. Adv. Funct. Mater. 2019, 29, 1904766. [Google Scholar] [CrossRef]
- Liu, M.; Wang, S.; Jiang, L. Nature-inspired superwettability systems. Nat. Rev. Mater. 2017, 2, 17036. [Google Scholar] [CrossRef]
- Su, B.; Tian, Y.; Jiang, L. Bioinspired Interfaces with Superwettability: From Materials to Chemistry. J. Am. Chem. Soc. 2016, 138, 1727–1748. [Google Scholar] [CrossRef]
- Yu, C.; Zhu, X.; Li, K.; Cao, M.; Jiang, L. Manipulating Bubbles in Aqueous Environment via a Lubricant-Infused Slippery Surface. Adv. Funct. Mater. 2017, 27, 1701605. [Google Scholar] [CrossRef]
- Jiao, Y.; Lv, X.; Zhang, Y.; Li, C.; Li, J.; Wu, H.; Xiao, Y.; Wu, S.; Hu, Y.; Wu, D.; et al. Pitcher plant bioinspired bubble slip-pery surface fabricated by femtosecond laser for buoyancy-driven gas self-transport and efficient capture. Nanoscale 2019, 11, 1370–1378. [Google Scholar] [CrossRef]
- Yong, C.; Chen, F.; Fang, Y.; Huo, J.; Yang, Q.; Zhang, J.; Bian, H.; Hou, H. Bioinspired Design of Underwater Superaero-phobic and Superaerophilic Surfaces by Femtosecond Laser Ablation for Anti-or Capturing Bubbles. ACS Appl. Mater. Interfaces 2017, 9, 39863–39871. [Google Scholar] [CrossRef]
- Tang, X.; Xiong, H.; Kong, T.; Tian, Y.; Li, W.-D.; Wang, L. Bioinspired Nanostructured Surfaces for On-Demand Bubble Transportation. ACS Appl. Mater. Interfaces 2018, 10, 3029–3038. [Google Scholar] [CrossRef]
- Zhang, X.; Shi, F.; Niu, J.; Jiang, Y.; Wang, Z. Superhydrophobic surfaces: From structural control to functional application. J. Mater. Chem. 2007, 18, 621–633. [Google Scholar] [CrossRef]
- De Ninno, A.; Gerardino, A.; Girarda, B.; Grenci, G.; Businaro, L. Top-Down Approach to Nanotechnology for Cell-on-Chip Applications. Available online: www.researchgate.net/publication/230583356 (accessed on 2 May 2021).
- Tachi, S.; Tsujimoto, K.; Okudaira, S. Low-temperature reactive ion etching and microwave plasma etching of silicon. Appl. Phys. Lett. 1988, 52, 616–618. [Google Scholar] [CrossRef]
- Snyder, J.G.; Lim, R.G.; Huang, C.K.; Fleurial, J.P. Thermoelectric microdevice fabricated by a MEMS-like electrochem-ical process. Nat. Mater. 2003, 2, 528–531. [Google Scholar] [CrossRef]
- Hopwood, J. Review of inductively coupled plasmas for plasma processing. Plasma Sources Sci. Technol. 1992, 1, 109–116. [Google Scholar] [CrossRef]
- Hench, L.L.; West, J.K. The sol-gel process. Chem. Rev. 1990, 90, 33–72. [Google Scholar] [CrossRef]
- Ionin, A.A.; Kudryashov, S.I.; Makarov, S.V.; Seleznev, L.V.; Sinitsyn, D.V.; Golosov, E.V.; Golosova, O.A.; Kolobov, Y.R.; Ligachev, A.E. Femtosecond laser color marking of metal and semiconductor surfaces. Appl. Phys. A 2012, 107, 301–305. [Google Scholar] [CrossRef]
- Suriano, R.; Kuznetsov, A.; Eaton, S.M.; Kiyan, R.; Cerullo, G.; Osellame, R.; Chichkov, B.N.; Levi, M.; Turri, S. Femtosecond laser ablation of polymeric substrates for the fabrication of microfluidic channels. Appl. Surf. Sci. 2011, 257, 6243–6250. [Google Scholar] [CrossRef]
- Qi, L.; Niu, Y.; Ruck, C.; Zhao, Y. Mechanical-activated digital microfluidics with gradient surface wettability. Lab Chip 2019, 19, 223–232. [Google Scholar] [CrossRef]
- Jiao, Y.; Li, C.; Ji, J.; Wang, Z.; Tao, T.; Zhang, T.; Liu, K. Femtosecond laser-induced shape memory polymer micropillar with tunable wettability and reversible adhesion for underwater oil droplet lossless transfer. Appl. Phys. Lett. 2021, 118, 033701. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiao, Y.; Li, C.; Chen, C.; Li, J.; Hu, Y.; Wu, D.; Chu, J. Bioinspired micro/nanostructured surfaces prepared by femtosecond laser direct writing for multi-functional applications. Int. J. Extreme Manuf. 2020, 2, 032002. [Google Scholar] [CrossRef]
- Jiao, Y.; Zhang, Y.; Lv, X.; Ji, J.; Wang, Z.; Su, Y.; Liu, X.; Liu, K. In Situ Tuning Underwater Bubble Movement on Slippery Lubricant-Infused Anisotropic Microgrooved Surface by Unidirectional Mechanical Strain. Langmuir 2021, 37, 2140–2145. [Google Scholar] [CrossRef]
- Wong, T.-S.; Kang, S.H.; Tang, S.K.Y.; Smythe, E.J.; Hatton, B.D.; Grinthal, A.; Aizenberg, J. Bioinspired self-repairing slippery surfaces with pressure-stable omniphobicity. Nat. Cell Biol. 2011, 477, 443–447. [Google Scholar] [CrossRef]
- Epstein, A.; Wong, T.; Belisa, R.; Boggs, E.; Aizenberg, J. Liquid-Infused Structured Surfaces with Exceptional An-ti-Biofouling Performance. Proc. Natl. Acad. Sci. USA 2012, 109, 13182–13187. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, P.; Wong, T.; Alvarenga, J.; Adorno, W.; Aizenberg, J. Liquid-Infused Nanostructured Surfaces with Extreme An-ti-Ice and Anti-Frost Performance. ACS Nano 2012, 6, 6569–6577. [Google Scholar] [CrossRef] [PubMed]
- Villegas, M.; Zhang, Y.; Jarad, N.; Soleymani, L.; Didar, T. Liquid-infused surfaces: A review of theory, design, and appli-cations. ACS Nano 2019, 13, 8517–8536. [Google Scholar] [CrossRef] [PubMed]
- Furmidge, L. Studies at phase interfaces. I. The sliding of liquid drops on solid surfaces and a theory for spray retention. J. Colloid Sci. 1962, 17, 309–324. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, W.; Chen, X.; Jiao, Y. Liquid-Infused Microgrooved Slippery Surface Ablated by One-Step Laser Irradiation for Underwater Bubble Directional Manipulation and Anisotropic Spreading. Micromachines 2021, 12, 555. https://doi.org/10.3390/mi12050555
Liu W, Chen X, Jiao Y. Liquid-Infused Microgrooved Slippery Surface Ablated by One-Step Laser Irradiation for Underwater Bubble Directional Manipulation and Anisotropic Spreading. Micromachines. 2021; 12(5):555. https://doi.org/10.3390/mi12050555
Chicago/Turabian StyleLiu, Wei, Xuehui Chen, and Yunlong Jiao. 2021. "Liquid-Infused Microgrooved Slippery Surface Ablated by One-Step Laser Irradiation for Underwater Bubble Directional Manipulation and Anisotropic Spreading" Micromachines 12, no. 5: 555. https://doi.org/10.3390/mi12050555