Detection of Corrosion-Indicating Oxidation Product Colors in Steel Bridges under Varying Illuminations, Shadows, and Wetting Conditions


Abstract
:1. Introduction
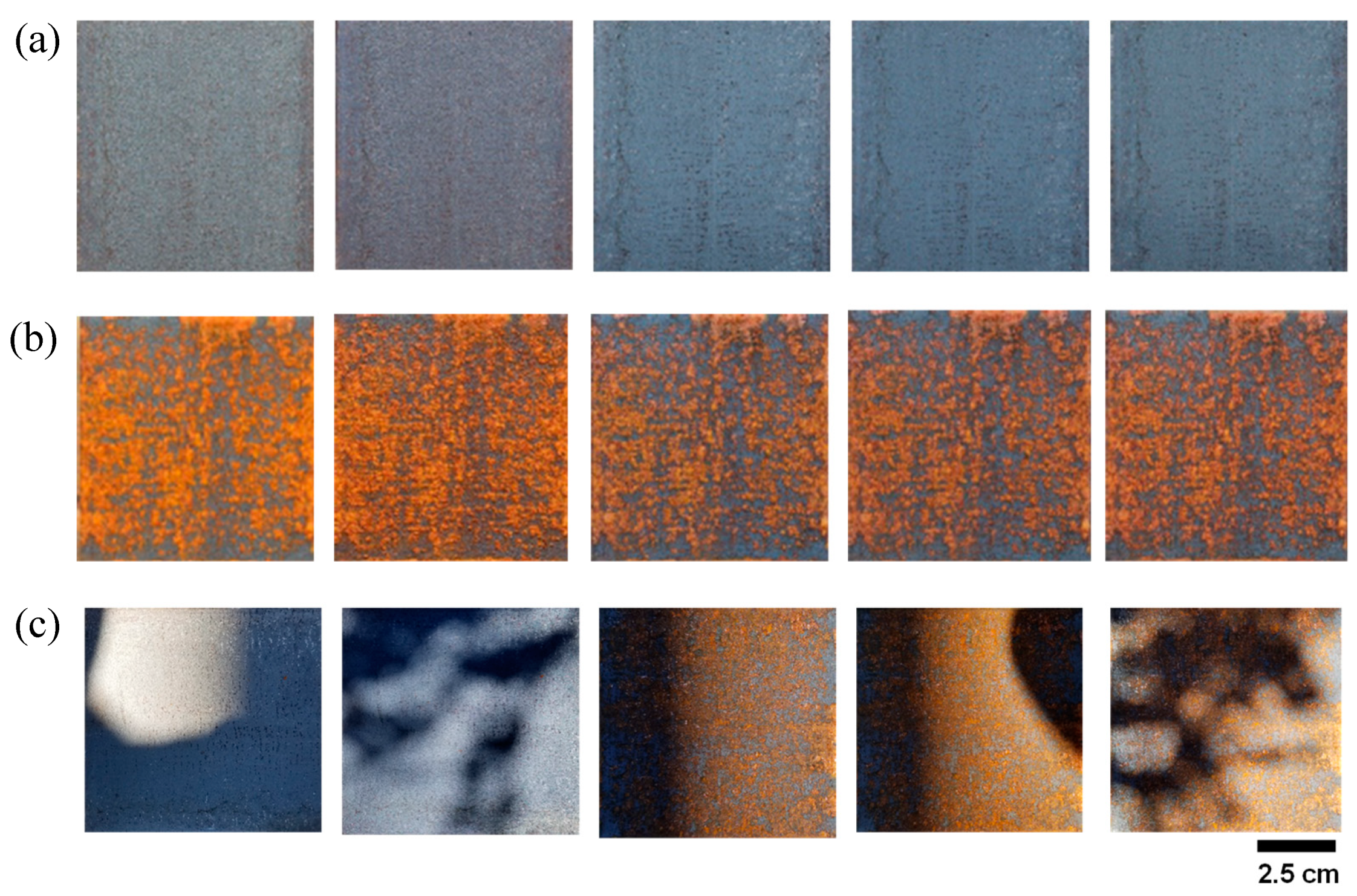
2. Laboratory Generated Corrosion Images
Accelerated Corrosion Tests and Image Acquisition
3. Color Feature Extraction and Dataset Generation
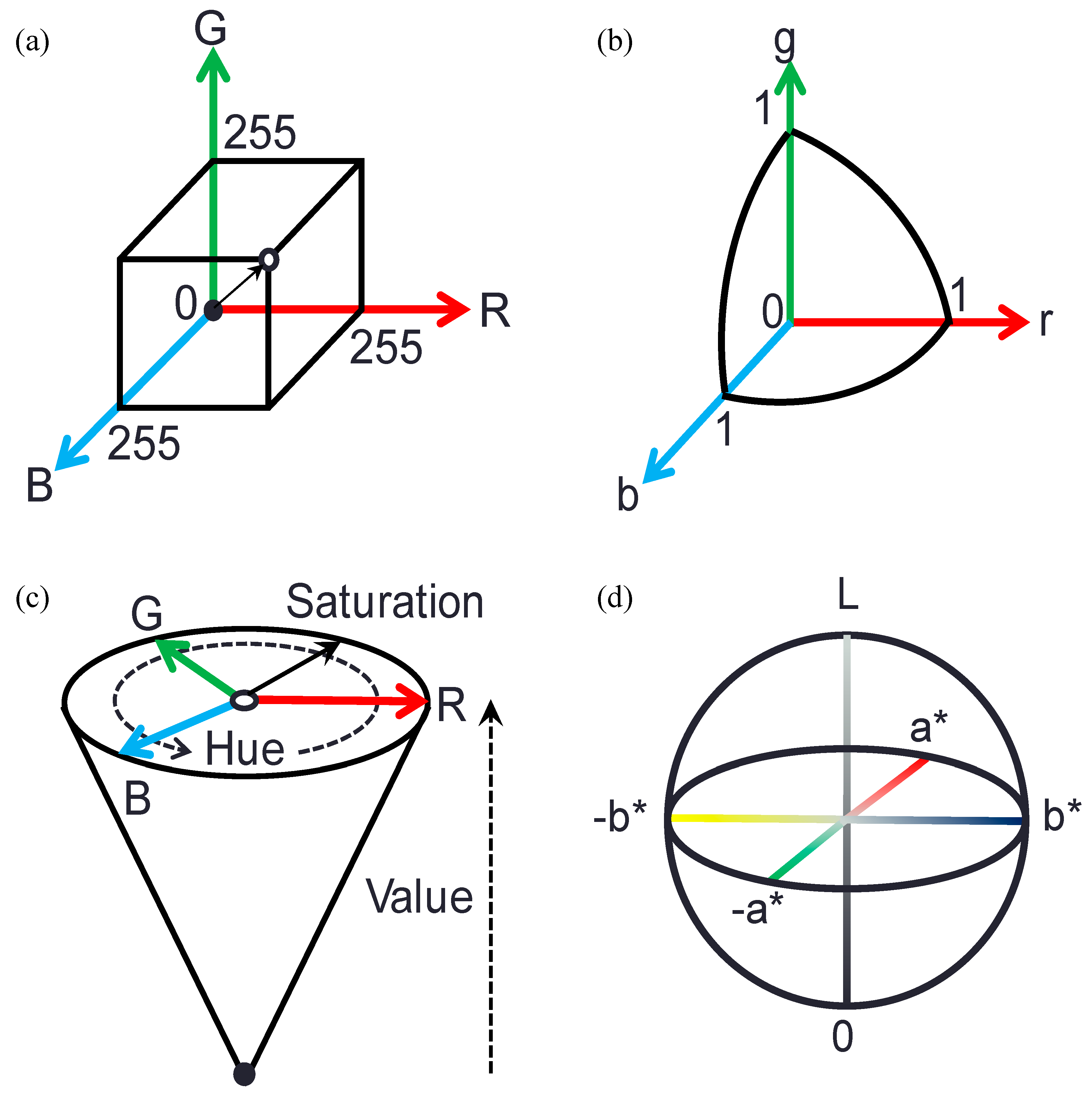
3.1. Color Spaces and Color Features
3.1.1. ‘RGB’ Color Space
3.1.2. ‘rgb’ Color Space
3.1.3. ‘HSV’ Color Space
3.1.4. ‘CIE La*b*’ Color Space
3.2. Training Dataset
3.3. Validation Dataset
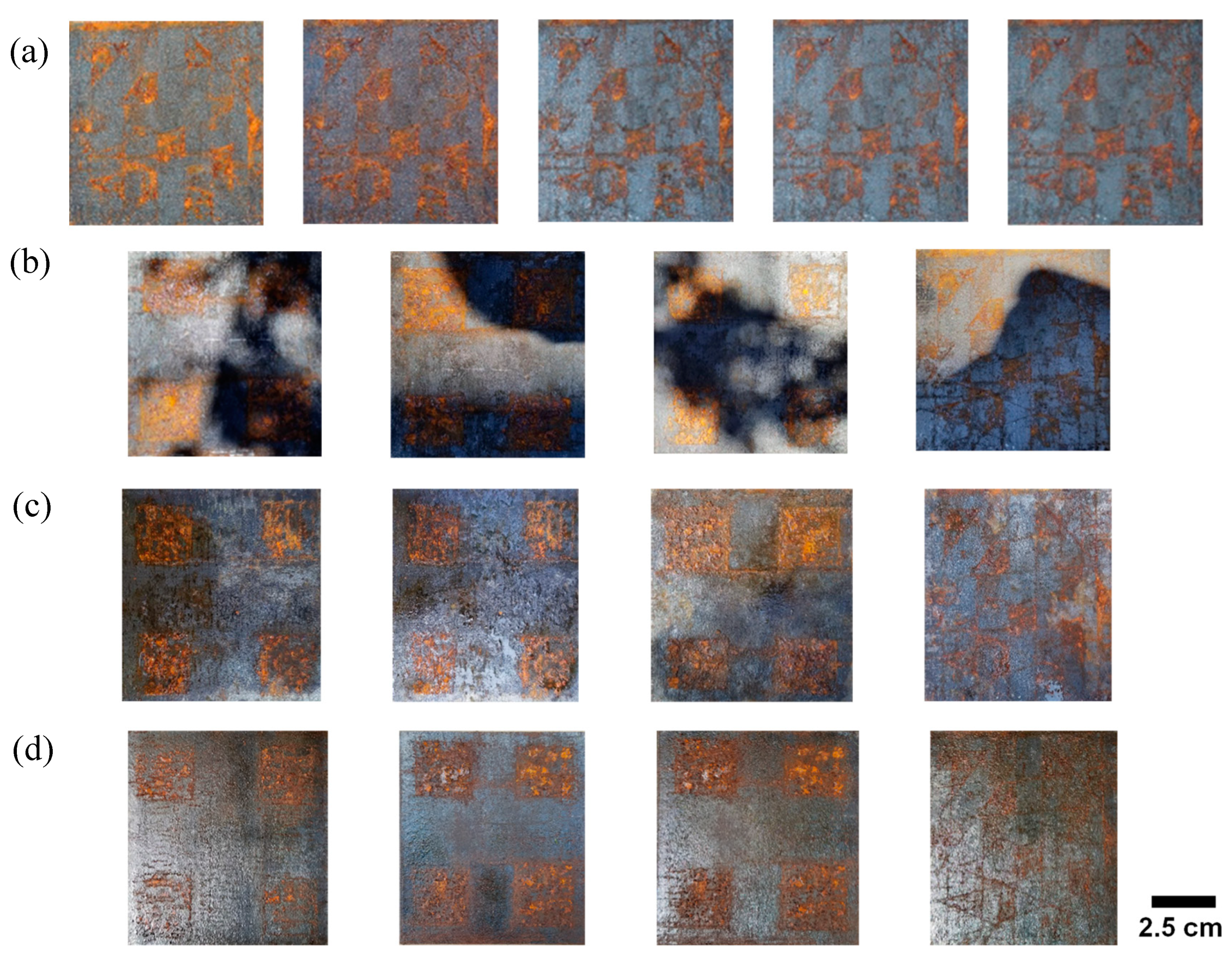
3.4. Test Image Database
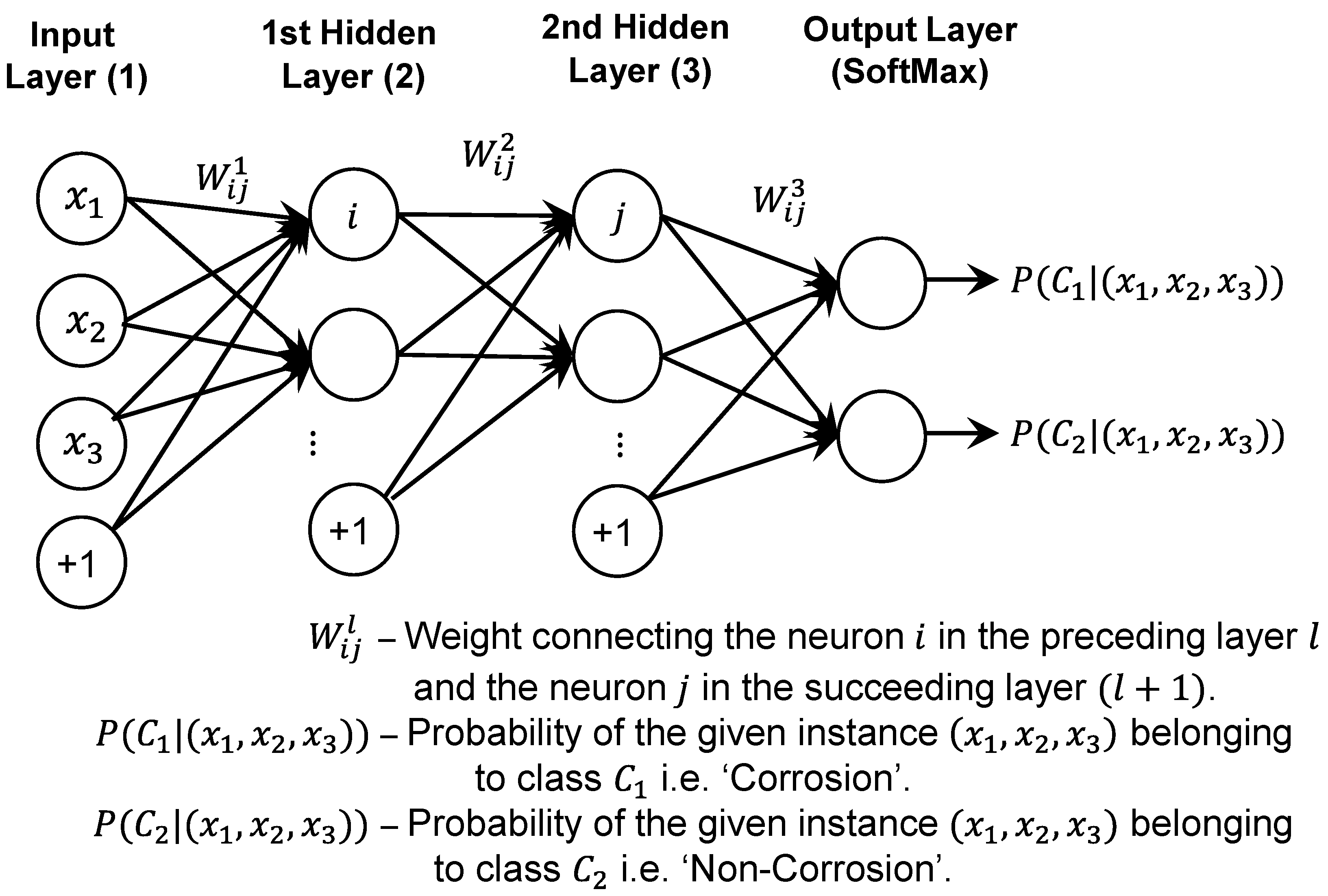
4. Multi-Layer Perceptron
5. Results
5.1. Determining the Best Combination of Color Space and MLP
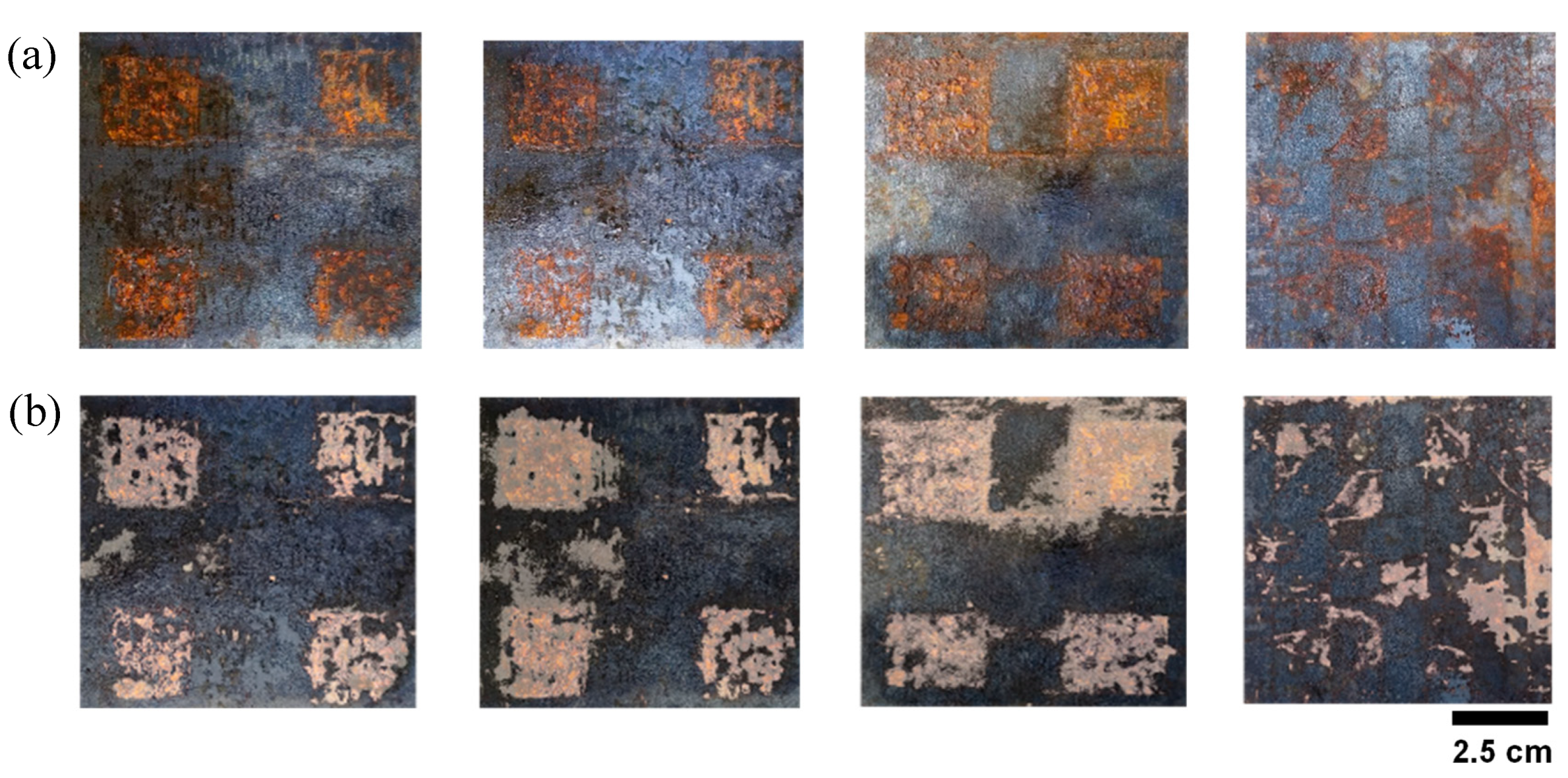
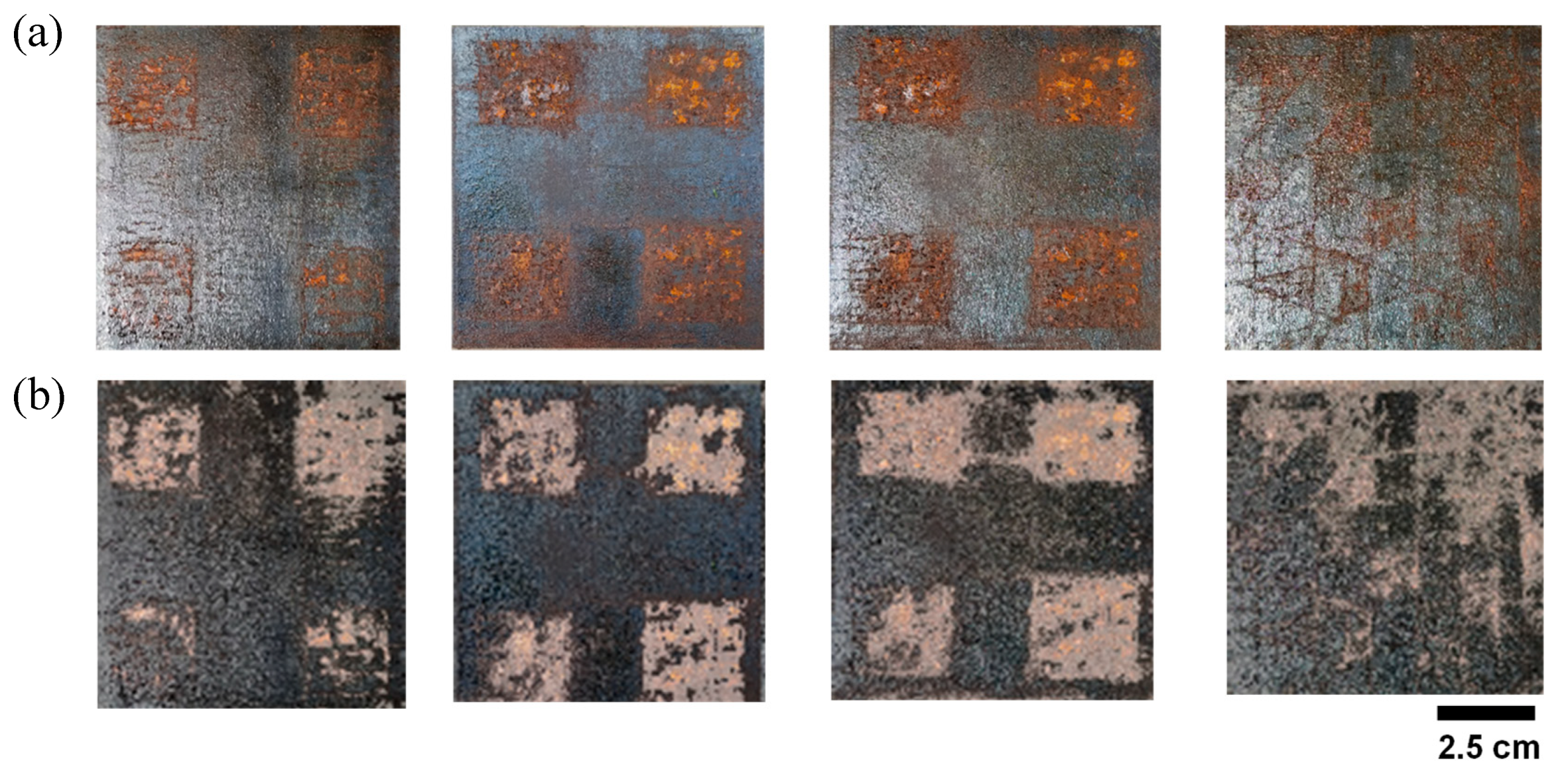
5.2. Detection of Corrosion in Lab Generated Test Images
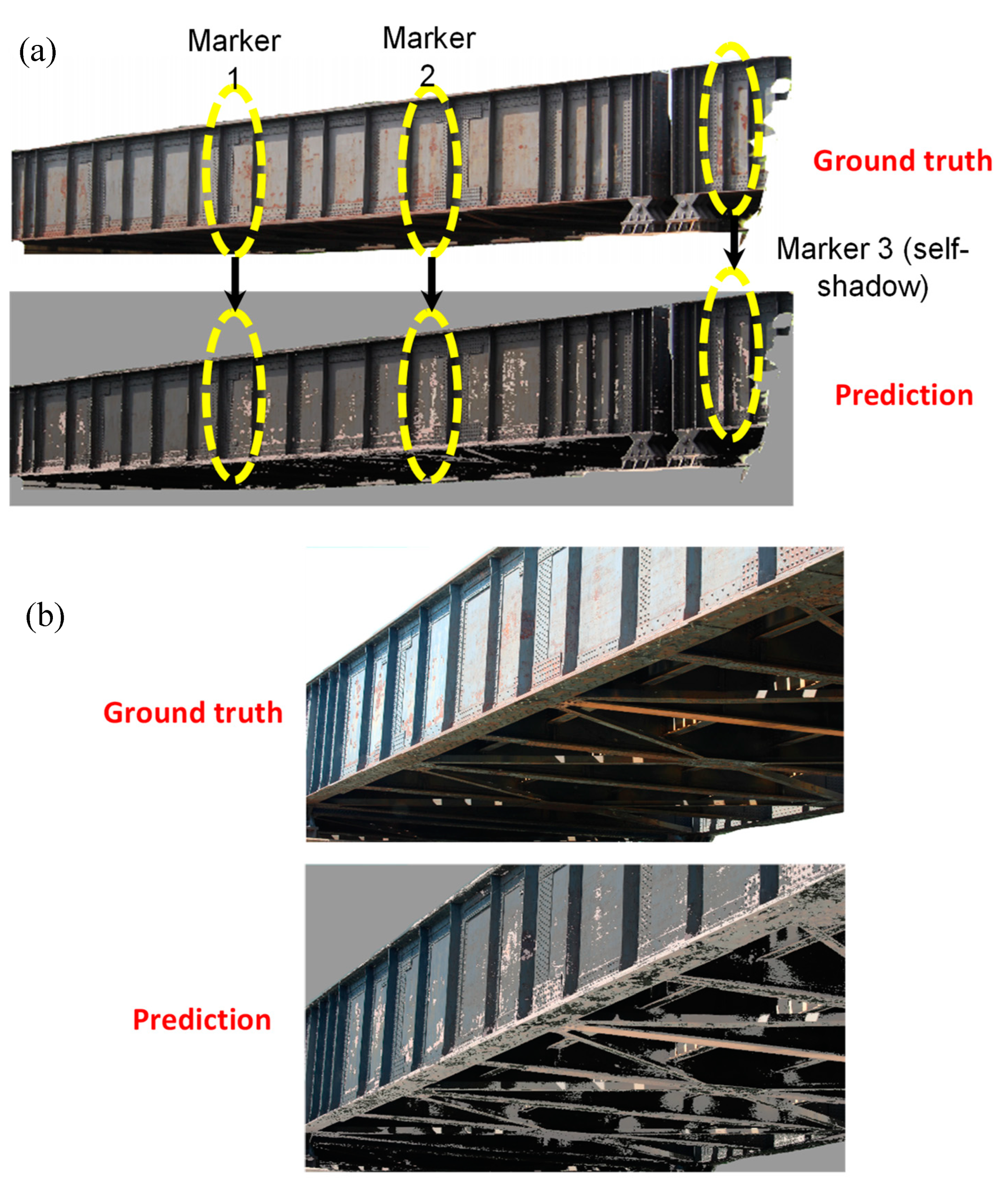
5.3. Detection of Corrosion in Steel Bridge
6. Conclusions and Limitations
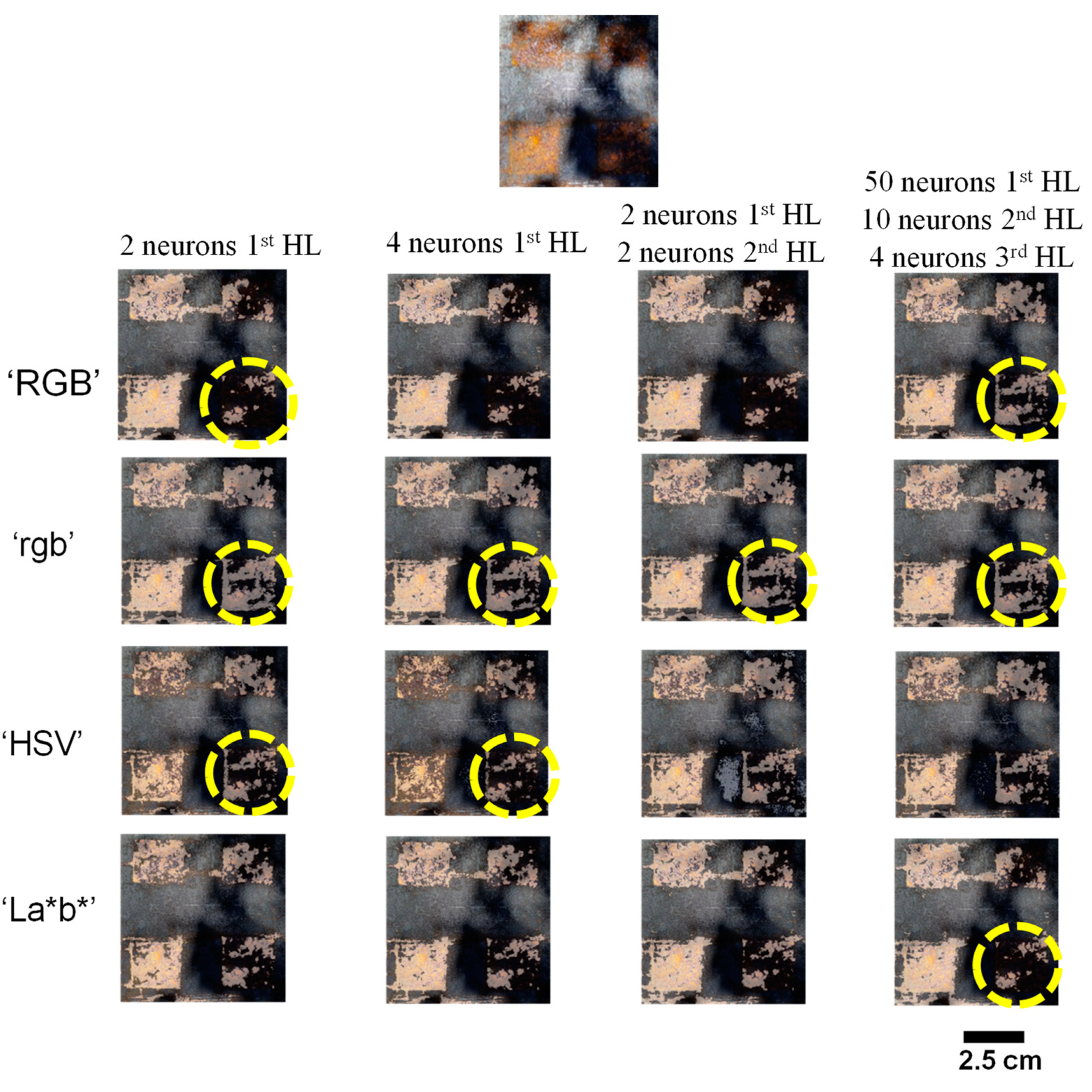
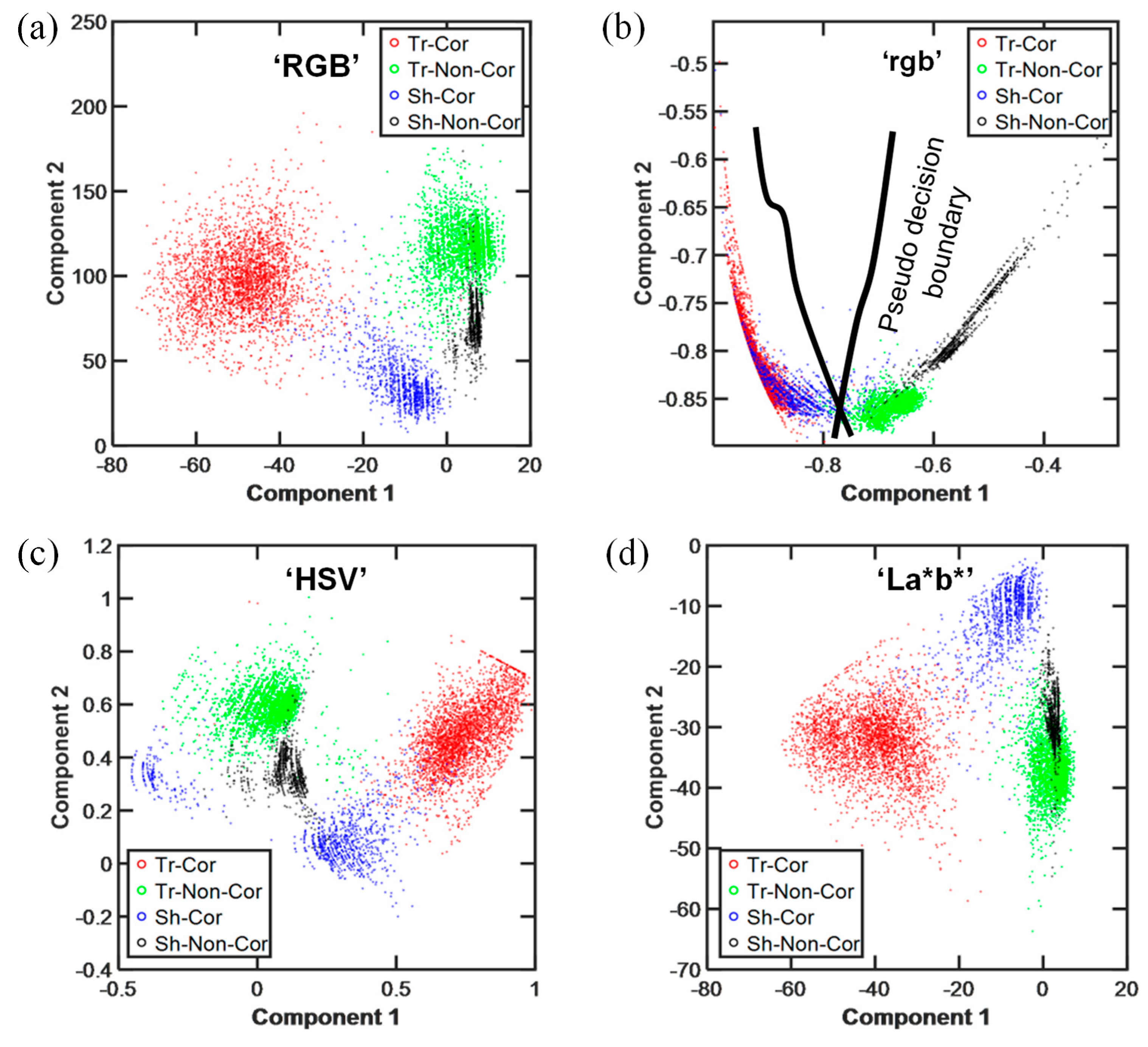
- Among all 16 combinations of color space and an MLP configuration, the combination of ‘rgb’ color space and an MLP configuration of a single hidden layer with 4 neurons (1st HL (4N)) yielded the highest ‘Recall’ of 81% and hence chosen as the best combination.
- While the accuracy (up to 91%) of ‘rgb’ color space is found to be more or less similar for all the MLP configurations, the accuracy of ‘RGB’ color space is observed to increase from 68% to 81% with the addition of third hidden layer. Improved accuracy in the case of ‘RGB’ color space can be attributed to the increased non-linearity of the decision boundary generated by the MLP which will ultimately lead to overfitting issues.
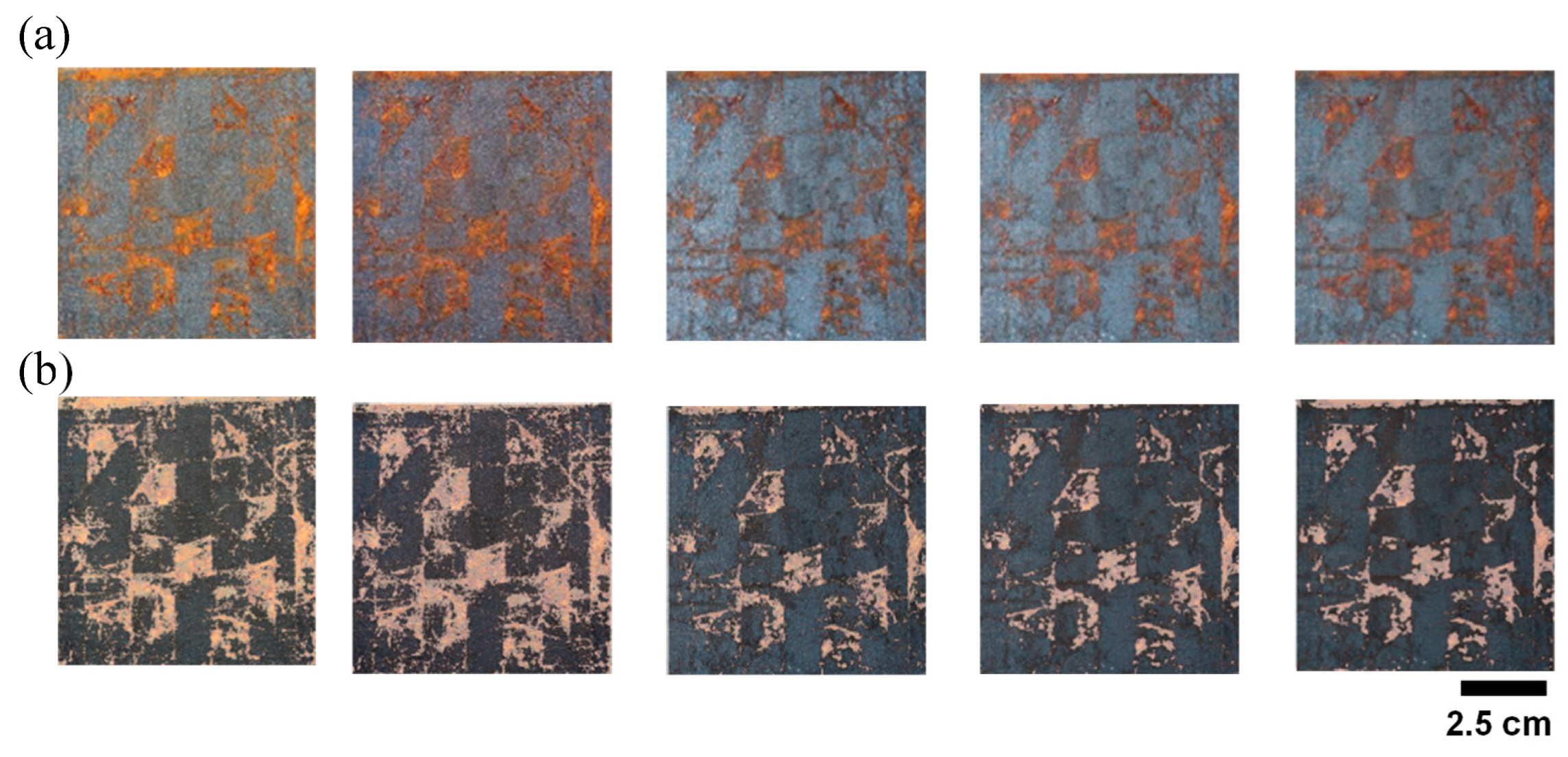
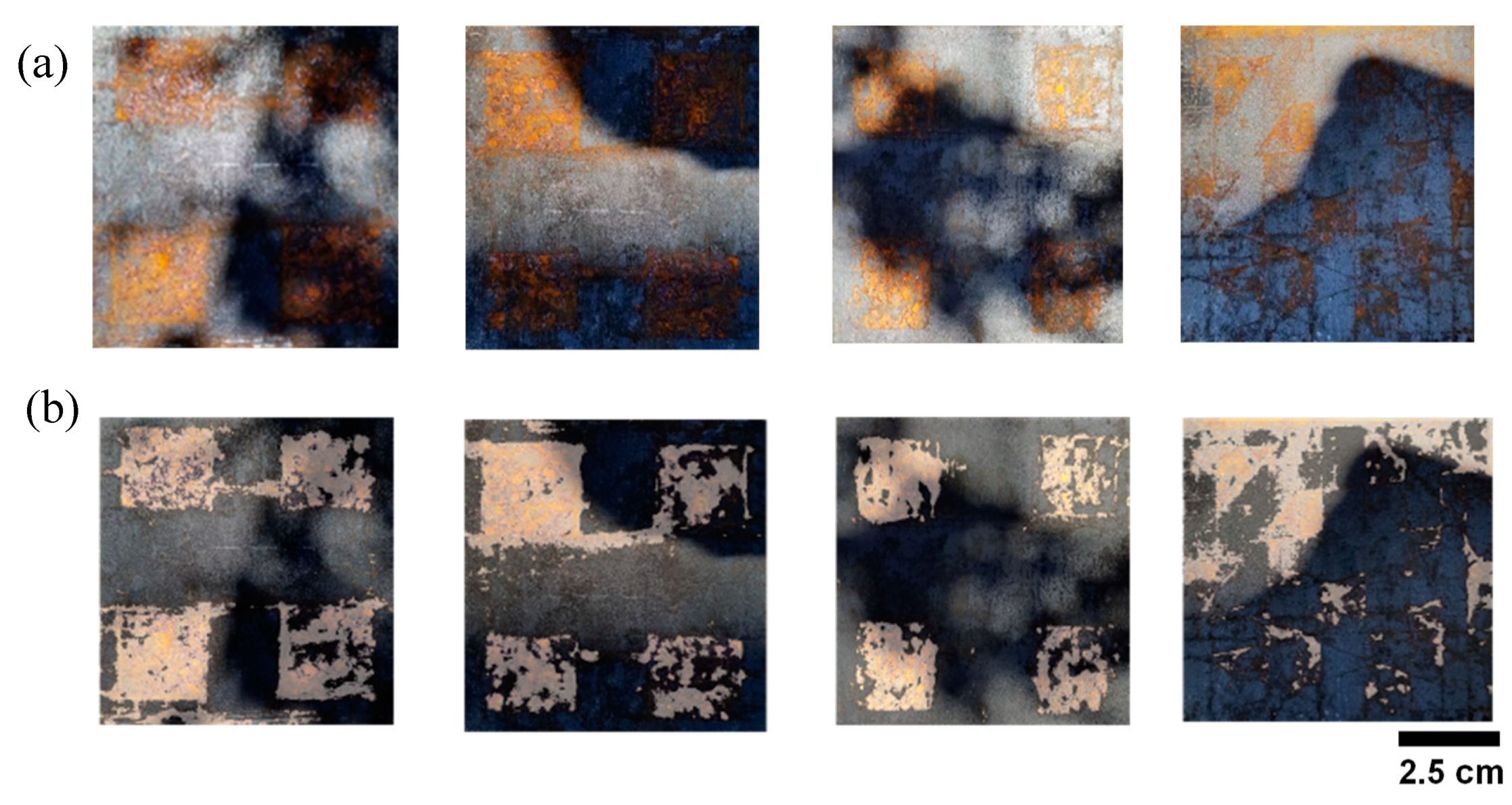
- Under shadows and wetting conditions, the trained MLP is still found to yield correct predictions when ‘rgb’ color features are used. In particular, the detection of corrosion in the bottom side of the deck of a bridge under dark shadows is noteworthy.
- The proposed method is insensitive to the camera sensor employed for the image acquisition i.e., irrespective of images being acquired from a mobile camera or a DSLR camera the efficacy of trained MLP to detect corrosion was not affected.
- MLP trained on varying illumination dataset alone is sufficient for detecting the corrosion under shadows and wetting conditions.
Author Contributions
Funding
Conflicts of Interest
Data Availability
Appendix A
References
- Troitsky, M.S. Planning and Design of Bridges; John Wiley & Sons, Inc.: New York, NY, USA, 1994. [Google Scholar]
- Haas, T. Are Reinforced Concrete Girder Bridges More Economical Than Structural Steel Girder Bridges? A South African Perspective. Jordan J. Civ. Eng. 2014, 159, 1–15. [Google Scholar] [CrossRef]
- Sastri, V.S. Challenges in Corrosion: Costs, Causes, Consequences, and Control; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Chen, W.-F.; Duan, L. Bridge Engineering Handbook: Construction and Maintenance; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- García-Martín, J.; Gómez-Gil, J.; Vázquez-Sánchez, E. Non-Destructive Techniques Based on Eddy Current Testing. Sensors 2011, 11, 2525–2565. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pavlopoulou, S.; Staszewski, W.; Soutis, C. Evaluation of instantaneous characteristics of guided ultrasonic waves for structural quality and health monitoring. Struct. Control Health Monit. 2012, 20, 937–955. [Google Scholar] [CrossRef]
- Sharma, S.; Mukherjee, A. Ultrasonic guided waves for monitoring corrosion in submerged plates. Struct. Control Health Monit. 2015, 22, 19–35. [Google Scholar] [CrossRef]
- Nowak, M.; Lyasota, I.; Baran, I. The test of railway steel bridge with defects using acoustic emission method. J. Acoust. Emiss. 2016, 33, 363–372. [Google Scholar]
- Cole, P.; Watson, J. Acoustic emission for corrosion detection. In Advanced Materials Research; Trans Tech Publications Ltd.: Stafa-Zurich, Switzerland, 2006; pp. 231–236. [Google Scholar]
- Deraemaeker, A.; Reynders, E.; De Roeck, G.; Kullaa, J. Vibration-based structural health monitoring using output-only measurements under changing environment. Mech. Syst. Signal Process. 2008, 22, 34–56. [Google Scholar] [CrossRef] [Green Version]
- McCrea, A.; Chamberlain, D.; Navon, R. Automated inspection and restoration of steel bridges—A critical review of methods and enabling technologies. Autom. Constr. 2002, 11, 351–373. [Google Scholar] [CrossRef]
- Doshvarpassand, S.; Wu, C.; Wang, X. An overview of corrosion defect characterization using active infrared thermography. Infrared Phys. Technol. 2019, 96, 366–389. [Google Scholar] [CrossRef]
- Jahanshahi, M.R.; Kelly, J.S.; Masri, S.F.; Sukhatme, G.S. A survey and evaluation of promising approaches for automatic image-based defect detection of bridge structures. Struct. Infrastruct. Eng. 2009, 5, 455–486. [Google Scholar] [CrossRef]
- Chen, P.-H.; Chang, L.-M. Artificial intelligence application to bridge painting assessment. Autom. Constr. 2003, 12, 431–445. [Google Scholar] [CrossRef]
- Chen, P.-H.; Yang, Y.-C.; Chang, L.-M. Automated bridge coating defect recognition using adaptive ellipse approach. Autom. Constr. 2009, 18, 632–643. [Google Scholar] [CrossRef]
- Shen, H.-K.; Chen, P.-H.; Chang, L.-M. Automated steel bridge coating rust defect recognition method based on color and texture feature. Autom. Constr. 2013, 31, 338–356. [Google Scholar] [CrossRef]
- Gevers, T.; Gijsenij, A.; Van De Weijer, J.; Geusebroek, J.-M. Color in Computer Vision: Fundamentals and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Koschan, A.; Abidi, M. Digital Color Image Processing; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Zhang, Z.; Flores, P.; Igathinathane, C.; Naik, D.L.; Kiran, R.; Ransom, J.K. Wheat Lodging Detection from UAS Imagery Using Machine Learning Algorithms. Remote Sens. 2020, 12, 1838. [Google Scholar] [CrossRef]
- Naik, D.L.; Kiran, R. Identification and characterization of fracture in metals using machine learning based texture recognition algorithms. Eng. Fract. Mech. 2019, 219, 106618. [Google Scholar] [CrossRef]
- Medeiros, F.N.; Ramalho, G.L.B.; Bento, M.P. On the Evaluation of Texture and Color Features for Nondestructive Corrosion Detection. Eurasip J. Adv. Signal Process. 2010, 2010, 817473. [Google Scholar] [CrossRef] [Green Version]
- Ranjan, R.; Gulati, T. Condition assessment of metallic objects using edge detection. Int. J. Adv. Res. Comput. Sci. Softw. Eng. 2014, 4, 253–258. [Google Scholar]
- Lee, S.; Chang, L.-M.; Skibniewski, M. Automated recognition of surface defects using digital color image processing. Autom. Constr. 2006, 15, 540–549. [Google Scholar] [CrossRef]
- Chen, P.-H.; Shen, H.-K.; Lei, C.-Y.; Chang, L.-M. Support-vector-machine-based method for automated steel bridge rust assessment. Autom. Constr. 2012, 23, 9–19. [Google Scholar] [CrossRef]
- Ghanta, S.; Karp, T.; Lee, S. Wavelet domain detection of rust in steel bridge images. In Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011. [Google Scholar]
- Nelson, B.N.; Slebodnick, P.; Lemieux, E.J.; Singleton, W.; Krupa, M.; Lucas, K.; Ii, E.D.T.; Seelinger, A. Wavelet processing for image denoising and edge detection in automatic corrosion detection algorithms used in shipboard ballast tank video inspection systems. In Proceedings of the Wavelet Applications VIII: International Society for Optics and Photonics, Orlando, FL, USA, 26 March 2001. [Google Scholar]
- Son, H.; Hwang, N.; Kim, C.; Kim, C. Rapid and automated determination of rusted surface areas of a steel bridge for robotic maintenance systems. Autom. Constr. 2014, 42, 13–24. [Google Scholar] [CrossRef]
- Liao, K.-W.; Lee, Y.-T. Detection of rust defects on steel bridge coatings via digital image recognition. Autom. Constr. 2016, 71, 294–306. [Google Scholar] [CrossRef]
- Sajid, H.U.; Naik, D.L.; Kiran, R. Microstructure–Mechanical Property Relationships for Post-Fire Structural Steels. J. Mater. Civ. Eng. 2020, 32, 04020133. [Google Scholar] [CrossRef]
- Sajid, H.U.; Kiran, R. Influence of corrosion and surface roughness on wettability of ASTM A36 steels. J. Constr. Steel Res. 2018, 144, 310–326. [Google Scholar] [CrossRef]
- Delgado-González, M.J.; Carmona-Jiménez, Y.; Rodríguez-Dodero, M.C.; García-Moreno, M.V. Color Space Mathematical Modeling Using Microsoft Excel. J. Chem. Educ. 2018, 95, 1885–1889. [Google Scholar] [CrossRef]
- Garcia-Lamont, F.; Cervantes, J.; López, A.; Rodriguez, L. Segmentation of images by color features: A survey. Neurocomputing 2018, 292, 1–27. [Google Scholar] [CrossRef]
- Smith, A.R. Color gamut transform pairs. ACM Siggraph Comput. Graph. 1978, 12, 12–19. [Google Scholar] [CrossRef]
- Liu, G.-H.; Yang, J.-Y. Exploiting Color Volume and Color Difference for Salient Region Detection. IEEE Trans. Image Process. 2018, 28, 6–16. [Google Scholar] [CrossRef]
- Shanmuganathan, S. Artificial Neural Network Modelling: An Introduction. In Intelligent Distributed Computing VI; Springer Science and Business Media LLC: Cham, Switzerland, 2016; pp. 1–14. [Google Scholar]
- Priddy, K.L.; Keller, P.E. Artificial Neural Networks: An Introduction; SPIE Press: Bellingham, WA, USA, 2005. [Google Scholar]
- Aggarwal, C.C. Neural Networks and Deep Learning; Springer International Publishing: Cham, Switzerland, 2018. [Google Scholar]
- Daniel, G. Principles of Artificial Neural Networks; World Scientific: Hoboken, NJ, USA, 2013. [Google Scholar]
- Leva, S.; Ogliari, E. Computational Intelligence in Photovoltaic Systems. Appl. Sci. 2019, 9, 1826. [Google Scholar] [CrossRef] [Green Version]
- Engel, T.; Gasteiger, J. Chemoinformatics: Basic Concepts and Methods; Wiley-VCH: Weinheim, Germany, 2018. [Google Scholar]
- Naik, D.L.; Sajid, H.U.; Kiran, R. Texture-Based Metallurgical Phase Identification in Structural Steels: A Supervised Machine Learning Approach. Metals 2019, 9, 546. [Google Scholar] [CrossRef] [Green Version]
- Naik, D.L.; Kiran, R. Naïve Bayes classifier, multivariate linear regression and experimental testing for classification and characterization of wheat straw based on mechanical properties. Ind. Crop. Prod. 2018, 112, 434–448. [Google Scholar] [CrossRef]
- Sethi, I.K.; Jain, A.K. Artificial Neural Networks and Statistical Pattern Recognition: Old and New Connections; Elsevier: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Li, C.; Wang, B. Fisher Linear Discriminant Analysis. Available online: https://www.ccs.neu.edu/home/vip/teach/MLcourse/5_features_dimensions/lecture_notes/LDA/LDA.pdf (accessed on 27 October 2020).
- Gu, Q.; Li, Z.; Han, J. Linear discriminant dimensionality reduction. In Joint European Conference on Machine Learning and Knowledge Discovery in Databases; Springer: Berlin/Heidelberg, Germany, 2011; pp. 549–564. [Google Scholar]
- Tan, K.; Cheng, X. Specular Reflection Effects Elimination in Terrestrial Laser Scanning Intensity Data Using Phong Model. Remote. Sens. 2017, 9, 853. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.-C. Introduction to Color Imaging Science; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Mestha, L.K.; Dianat, S.A. Control of Color Imaging Systems: Analysis and Design; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Composition | Symbol | wt. % |
|---|---|---|
| Carbon | C | 0.25–0.29 |
| Iron | Fe | 98 |
| Copper | Cu | 0.2 |
| Manganese | Mn | 1.03 |
| Phosphorous | P | 0.04 |
| Silicon | Si | 0.28 |
| Sulfur | S | 0.05 |
| Color Space | Confusion Matrix | |||||||
|---|---|---|---|---|---|---|---|---|
| 2N | 4N | 2N-2N | 50N-10N-4N | |||||
| ‘RGB’ | 0.33 | 0.67 | 0.35 | 0.65 | 0.36 | 0.64 | 0.61 | 0.39 |
| 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | |
| Acc. | 66.50 | 67.50 | 68 | 80.50 | ||||
| ‘rgb’ | 0.79 | 0.21 | 0.81 | 0.19 | 0.81 | 0.19 | 0.82 | 0.18 |
| 0 | 1 | 0 | 1 | 0 | 1 | 0.03 | 0.97 | |
| Acc. | 89.50 | 90.50 | 90.50 | 89.50 | ||||
| ‘HSV’ | 0.66 | 0.34 | 0.68 | 0.32 | 0.70 | 0.30 | 0.60 | 0.40 |
| 0.38 | 0.62 | 0.28 | 0.72 | 0 | 1 | 0.04 | 0.96 | |
| Acc. | 64 | 70 | 85 | 78 | ||||
| ‘La*b*’ | 0.39 | 0.61 | 0.51 | 0.49 | 0.54 | 0.46 | 0.31 | 0.69 |
| 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | |
| Acc. | 69.50 | 75.50 | 77 | 65.50 | ||||
| Color Space | Performance Metrics (%) | ||||
|---|---|---|---|---|---|
| Accuracy | Recall | Precision | F-Measure | ||
| ‘RGB’ | 2N | 66.5 | 33 | 100 | 49.62 |
| 4N | 67.5 | 35 | 100 | 51.85 | |
| 2N-2N | 68 | 36 | 100 | 52.94 | |
| 50N-10N-4N | 80.5 | 61 | 100 | 75.78 | |
| ‘rgb’ | 2N | 89.5 | 79 | 100 | 88.27 |
| 4N | 90.5 | 81 | 100 | 89.50 | |
| 2N-2N | 90.5 | 81 | 100 | 89.50 | |
| 50N-10N-4N | 89.5 | 81 | 100 | 90.11 | |
| ‘HSV’ | 2N | 64 | 66 | 63 | 64.47 |
| 4N | 70 | 68 | 70 | 68.99 | |
| 2N-2N | 85 | 70 | 100 | 82.35 | |
| 50N-10N-4N | 78 | 60 | 100 | 75.00 | |
| ‘La*b*’ | 2N | 69.5 | 39 | 100 | 56.12 |
| 4N | 75.5 | 51 | 100 | 67.55 | |
| 2N-2N | 77 | 54 | 100 | 70.13 | |
| 50N-10N-4N | 65.5 | 31 | 100 | 47.33 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Naik, D.L.; Sajid, H.U.; Kiran, R.; Chen, G. Detection of Corrosion-Indicating Oxidation Product Colors in Steel Bridges under Varying Illuminations, Shadows, and Wetting Conditions. Metals 2020, 10, 1439. https://doi.org/10.3390/met10111439
Naik DL, Sajid HU, Kiran R, Chen G. Detection of Corrosion-Indicating Oxidation Product Colors in Steel Bridges under Varying Illuminations, Shadows, and Wetting Conditions. Metals. 2020; 10(11):1439. https://doi.org/10.3390/met10111439
Chicago/Turabian StyleNaik, Dayakar L., Hizb Ullah Sajid, Ravi Kiran, and Genda Chen. 2020. "Detection of Corrosion-Indicating Oxidation Product Colors in Steel Bridges under Varying Illuminations, Shadows, and Wetting Conditions" Metals 10, no. 11: 1439. https://doi.org/10.3390/met10111439