Parameter Identification in Nonlinear Mechanical Systems with Noisy Partial State Measurement Using PID-Controller Penalty Functions

Abstract
:1. Introduction
2. Methodology
2.1. Optimization Strategy
2.2. Error Convergence
3. Results
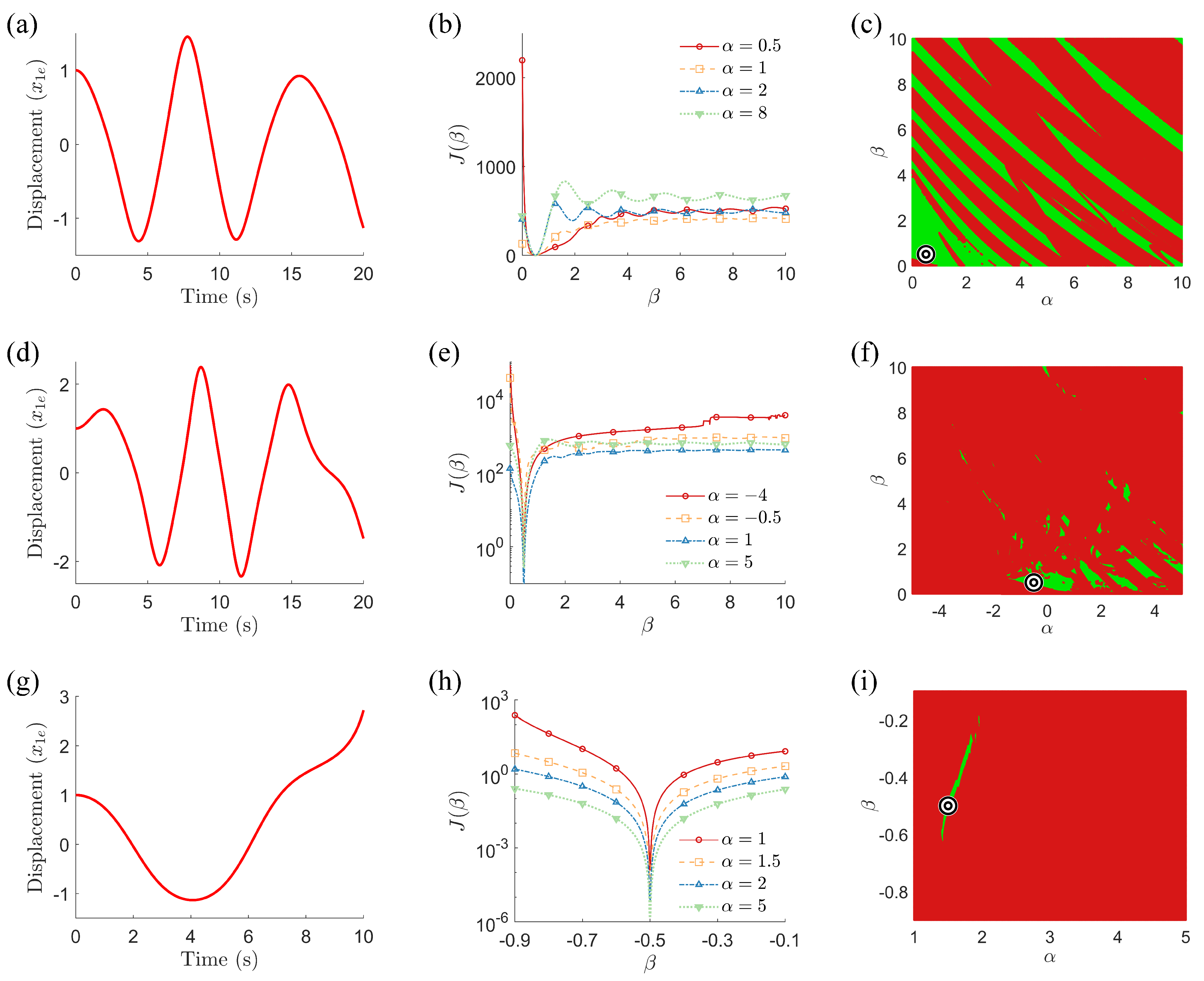
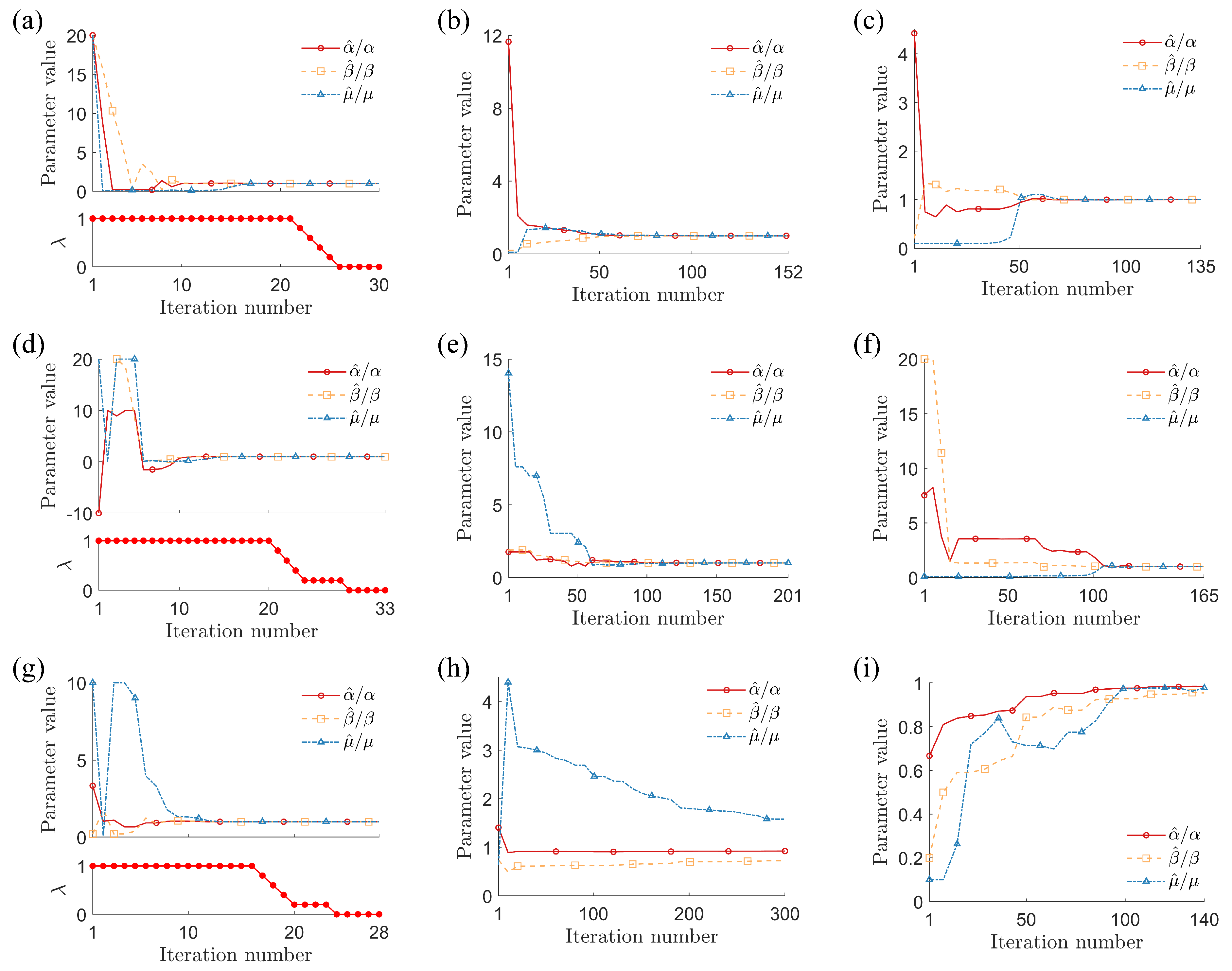
3.1. Van der Pol–Duffing Oscillator
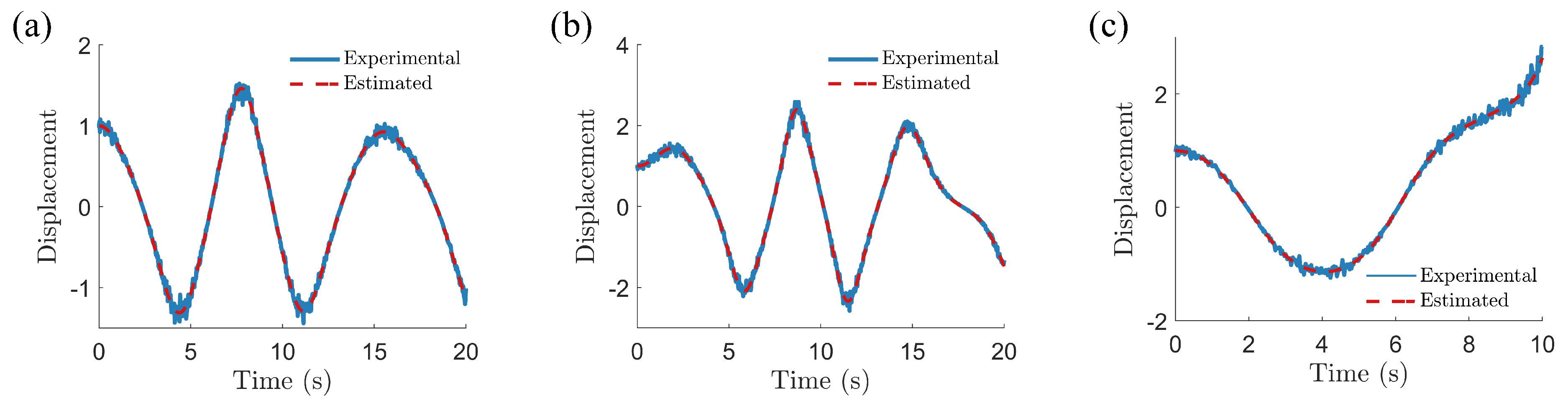
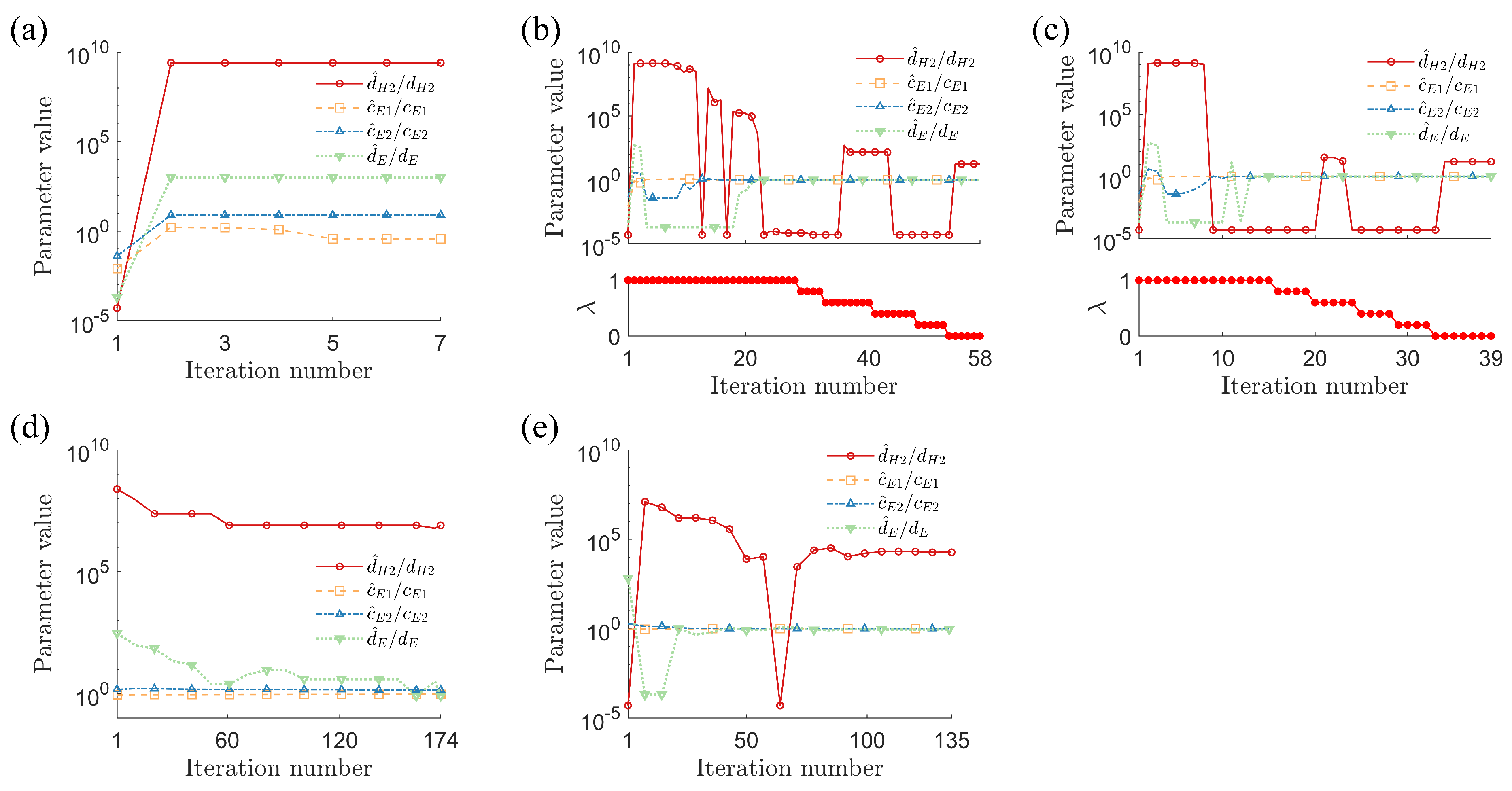
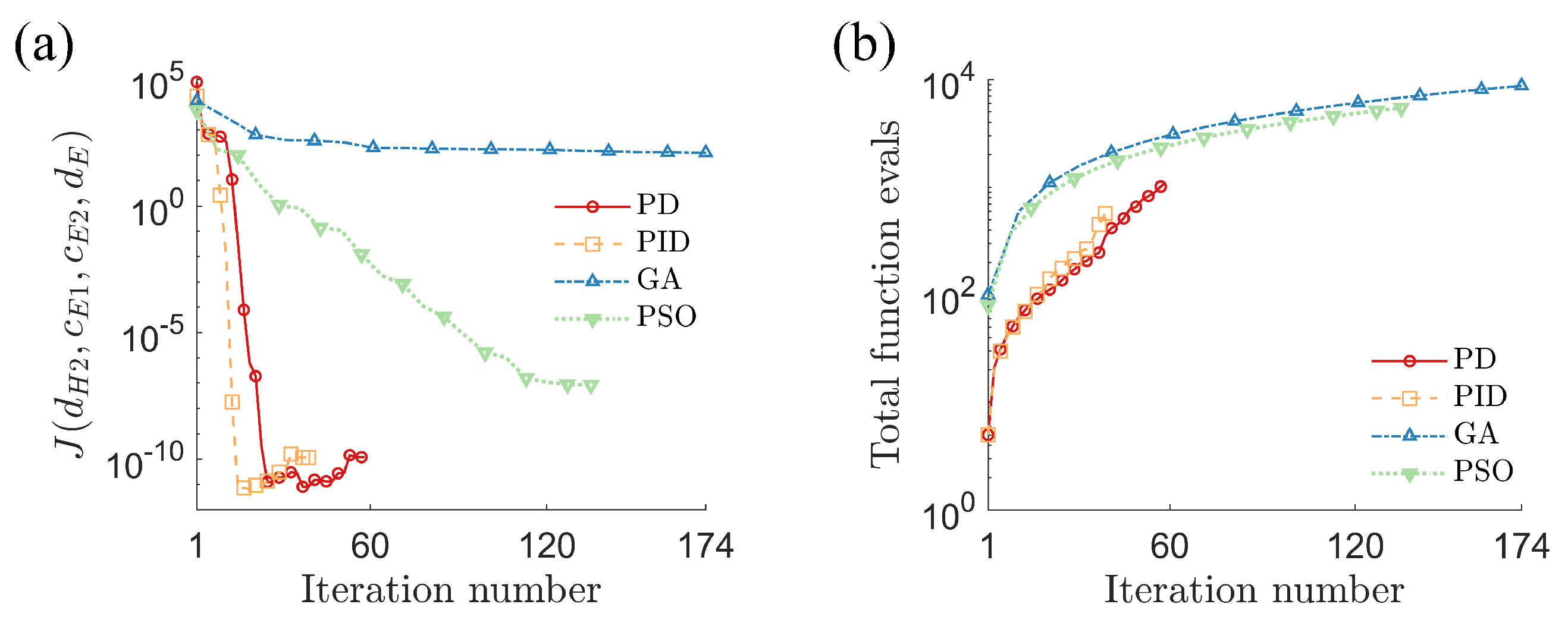
3.2. Hydraulic Engine Mount System
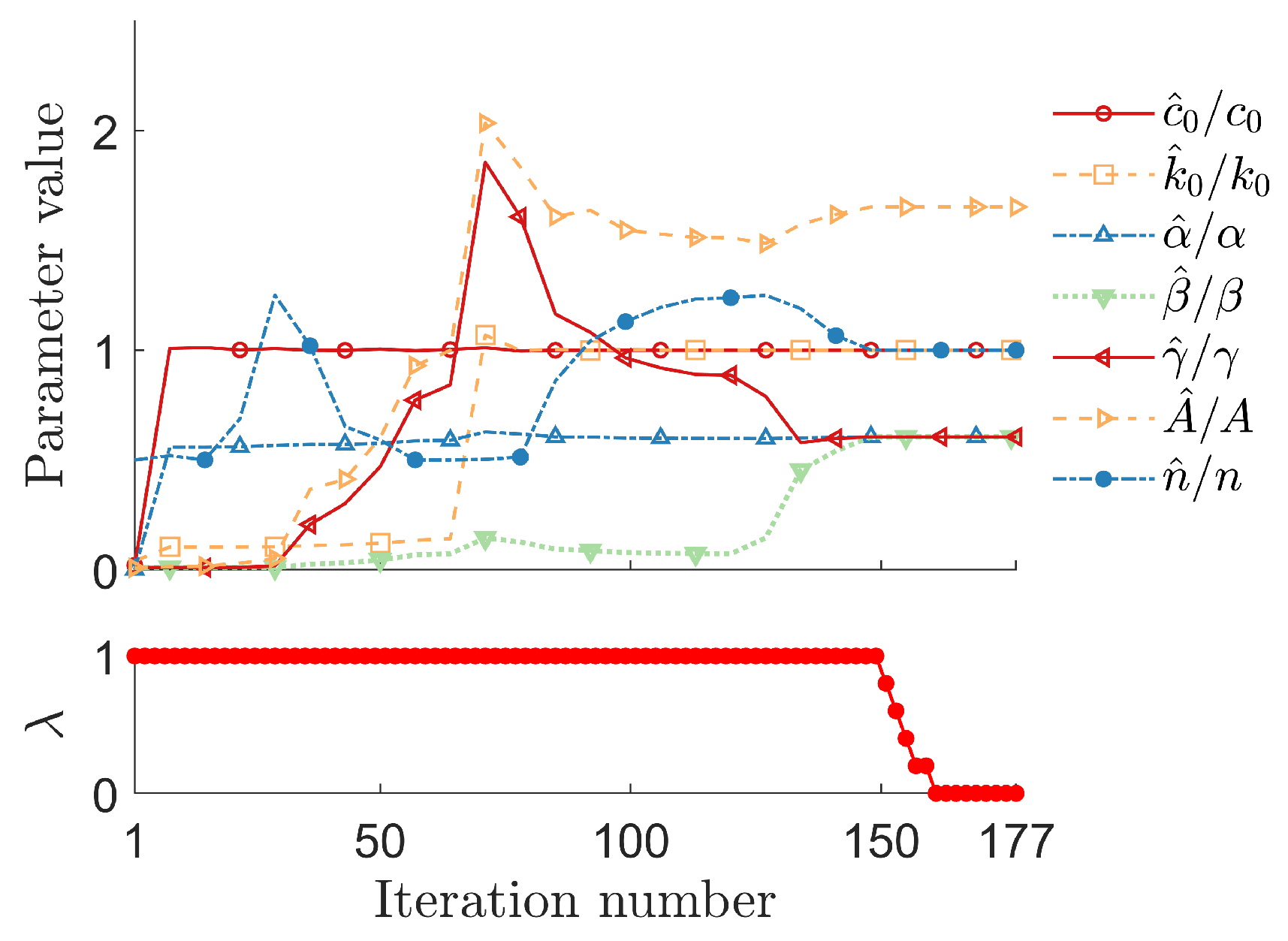
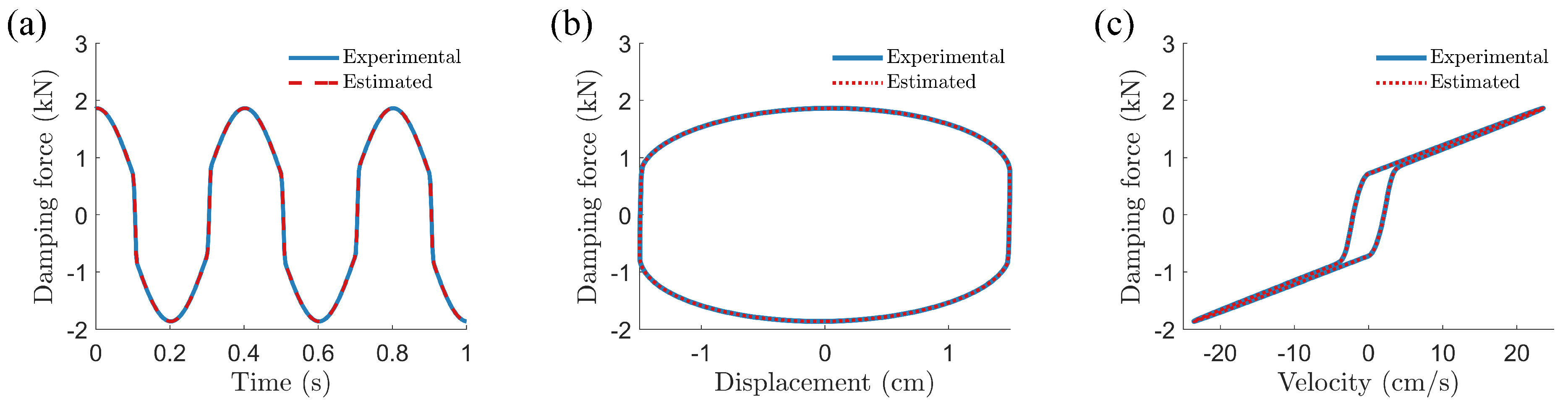
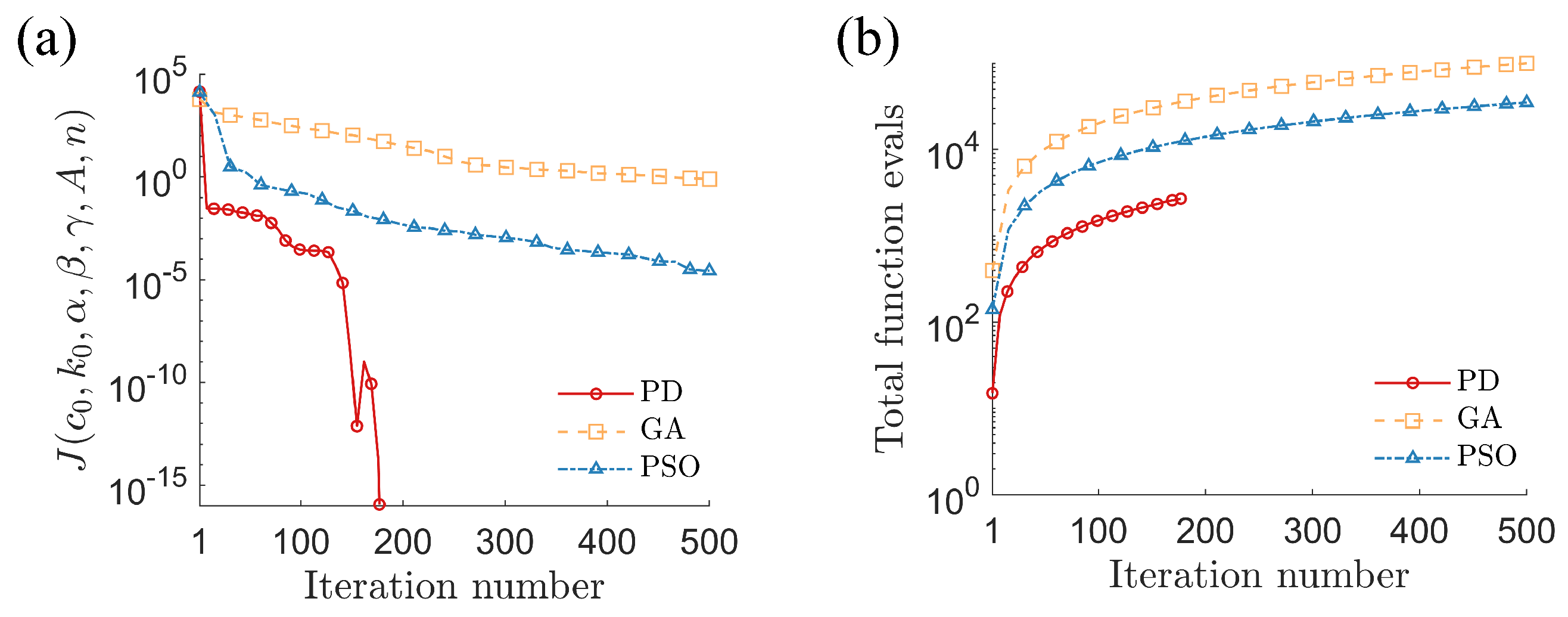
3.3. Magnetorheological Damper System
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gershenfeld, N. The Nature of Mathematical Modeling; Cambridge University Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Frewin, C. Literature Review and Implementation of Parameter Identification Methods for Multibody Systems Governed by Differential Algebraic Equations; Technical Report; University of Applied Sciences Upper Austria: Wels, Austria, 1 August 2013. [Google Scholar]
- Söderström, T.; Ljung, L. Theory and Practice of Recursive Identification; MIT Press: Cambridge, MA, USA, 1983. [Google Scholar]
- Rao, S.S. Engineering Optimization: Theory and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization and Machine Learning; Addison-Wesley: Boston, MA, USA, 1989. [Google Scholar]
- Romeijn, H.E.; Smith, R.L. Simulated annealing for constrained global optimization. J. Glob. Optim. 1994, 5, 101–126. [Google Scholar] [CrossRef] [Green Version]
- Watson, L.T.; Haftka, R.T. Modern homotopy methods in optimization. Comput. Methods Appl. Mech. Eng. 1989, 74, 289–305. [Google Scholar] [CrossRef] [Green Version]
- Vyasarayani, C.P.; Uchida, T.; McPhee, J. Nonlinear parameter identification in multibody systems using homotopy continuation. J. Comput. Nonlinear Dyn. 2012, 7, 011012. [Google Scholar] [CrossRef] [Green Version]
- Vyasarayani, C.P.; Uchida, T.; McPhee, J. Single-shooting homotopy method for parameter identification in dynamical systems. Phys. Rev. E 2012, 85, 036201. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Luenberger, D.G. Observing the state of a linear system. IEEE Trans. Mil. Electron. 1964, 8, 74–80. [Google Scholar] [CrossRef]
- Choi, Y.Y.; Kim, S.; Kim, S.; Choi, J.I. Multiple parameter identification using genetic algorithm in vanadium redox flow batteries. J. Power Sources 2020, 450, 227684. [Google Scholar] [CrossRef]
- Bartkowski, P.; Zalewski, R.; Chodkiewicz, P. Parameter identification of Bouc-Wen model for vacuum packed particles based on genetic algorithm. Arch. Civ. Mech. Eng. 2019, 19, 322–333. [Google Scholar] [CrossRef]
- Ariza, H.E.; Correcher, A.; Sánchez, C.; Pérez-Navarro, Á.; García, E. Thermal and electrical parameter identification of a proton exchange membrane fuel cell using genetic algorithm. Energies 2018, 11, 2099. [Google Scholar] [CrossRef] [Green Version]
- Yang, M.; Dai, Y.; Huang, Q.; Mao, X.; Li, L.; Jiang, X.; Peng, Y. A modal parameter identification method of machine tools based on particle swarm optimization. Proc. Inst. Mech. Eng. C J. Mech. Eng. Sci. 2019, 233, 6112–6123. [Google Scholar] [CrossRef]
- Soon, J.J.; Low, K.S. Photovoltaic model identification using particle swarm optimization with inverse barrier constraint. IEEE Trans. Power Electron. 2012, 27, 3975–3983. [Google Scholar] [CrossRef]
- Liu, W.; Liu, L.; Chung, I.Y.; Cartes, D.A. Real-time particle swarm optimization based parameter identification applied to permanent magnet synchronous machine. Appl. Soft Comput. 2011, 11, 2556–2564. [Google Scholar] [CrossRef]
- Abarbanel, H.D.I.; Creveling, D.R.; Farsian, R.; Kostuk, M. Dynamical state and parameter estimation. SIAM J. Appl. Dyn. Syst. 2009, 8, 1341–1381. [Google Scholar] [CrossRef]
- Cooper, M.; Heidlauf, P.; Sands, T. Controlling chaos—Forced van der Pol equation. Mathematics 2017, 5, 70. [Google Scholar] [CrossRef] [Green Version]
- Zhihong, Z.; Shaopu, Y. Application of van der Pol–Duffing oscillator in weak signal detection. Comput. Electr. Eng. 2015, 41, 1–8. [Google Scholar] [CrossRef]
- Ginoux, J.M.; Letellier, C. Van der Pol and the history of relaxation oscillations: Toward the emergence of a concept. Chaos 2012, 22, 023120. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kaplan, B.Z.; Gabay, I.; Sarafian, G.; Sarafian, D. Biological applications of the “filtered” van der Pol oscillator. J. Frankl. Inst. 2008, 345, 226–232. [Google Scholar] [CrossRef]
- Quaranta, G.; Monti, G.; Marano, G.C. Parameters identification of van der Pol–Duffing oscillators via particle swarm optimization and differential evolution. Mech. Syst. Signal Process. 2010, 24, 2076–2095. [Google Scholar] [CrossRef]
- Storn, R. On the usage of differential evolution for function optimization. In Proceedings of the 1996 Biennial Conference of the North American Fuzzy Information Processing Society, Berkeley, CA, USA, 19–22 June 1996; pp. 519–523. [Google Scholar]
- Marzbani, H.; Jazar, R.N.; Fard, M. Hydraulic engine mounts: A survey. J. Vib. Control 2014, 20, 1439–1463. [Google Scholar] [CrossRef]
- Yu, Y.; Peelamedu, S.M.; Naganathan, N.G.; Dukkipati, R.V. Automotive vehicle engine mounting systems: A survey. J. Dyn. Syst. Meas. Control 2001, 123, 186–194. [Google Scholar] [CrossRef]
- Flower, W.C. Understanding hydraulic mounts for improved vehicle noise, vibration and ride qualities. SAE Trans. 1985, 94, 832–841. [Google Scholar]
- Lauß, T.; Oberpeilsteiner, S.; Steiner, W.; Nachbagauer, K. The discrete adjoint method for parameter identification in multibody system dynamics. Multibody Syst. Dyn. 2018, 42, 397–410. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhu, X.; Jing, X.; Cheng, L. Magnetorheological fluid dampers: A review on structure design and analysis. J. Intell. Mater. Syst. Struct. 2012, 23, 839–873. [Google Scholar] [CrossRef]
- Bitaraf, M.; Ozbulut, O.E.; Hurlebaus, S.; Barroso, L. Application of semi-active control strategies for seismic protection of buildings with MR dampers. Eng. Struct. 2010, 32, 3040–3047. [Google Scholar] [CrossRef]
- Dominguez, A.; Sedaghati, R.; Stiharu, I. Modeling and application of MR dampers in semi-adaptive structures. Comput. Struct. 2008, 86, 407–415. [Google Scholar] [CrossRef]
- Boreiry, M.; Ebrahimi-Nejad, S.; Marzbanrad, J. Sensitivity analysis of chaotic vibrations of a full vehicle model with magnetorheological damper. Chaos Solitons Fractals 2019, 127, 428–442. [Google Scholar] [CrossRef]
- Yao, G.Z.; Yap, F.F.; Chen, G.; Li, W.H.; Yeo, S.H. MR damper and its application for semi-active control of vehicle suspension system. Mechatronics 2002, 12, 963–973. [Google Scholar] [CrossRef] [Green Version]
- Bouc, R. Forced vibrations of mechanical systems with hysteresis. In Proceedings of the Fourth Conference on Nonlinear Oscillations, Prague, Czech Republic, 5–9 September 1967; pp. 315–321. [Google Scholar]
- Wen, Y.K. Equivalent linearization for hysteretic systems under random excitation. J. Appl. Mech. 1980, 47, 150–154. [Google Scholar] [CrossRef]
- Spencer, B.F., Jr.; Dyke, S.J.; Sain, M.K.; Carlson, J.D. Phenomenological model for magnetorheological dampers. J. Eng. Mech. 1997, 123, 230–238. [Google Scholar] [CrossRef]
- Xiaomin, X.; Qing, S.; Ling, Z.; Bin, Z. Parameter estimation and its sensitivity analysis of the MR damper hysteresis model using a modified genetic algorithm. J. Intell. Mater. Syst. Struct. 2009, 20, 2089–2100. [Google Scholar] [CrossRef]
- Kwok, N.M.; Ha, Q.P.; Nguyen, M.T.; Li, J.; Samali, B. Bouc–Wen model parameter identification for a MR fluid damper using computationally efficient GA. ISA Trans. 2007, 46, 167–179. [Google Scholar] [CrossRef]
- Kwok, N.M.; Ha, Q.P.; Nguyen, T.H.; Li, J.; Samali, B. A novel hysteretic model for magnetorheological fluid dampers and parameter identification using particle swarm optimization. Sens. Actuators A Phys. 2006, 132, 441–451. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Single-Well | Double-Well | Double-Hump | |||
|---|---|---|---|---|---|---|
| Experimental Value | Bounds | Experimental Value | Bounds | Experimental Value | Bounds | |
| Strategy | Single-Well | Double-Well | Double-Hump | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Iter- ations | Function Evals | Error (J) | Iter- ations | Function Evals | Error (J) | Iter- ations | Function Evals | Error (J) | |
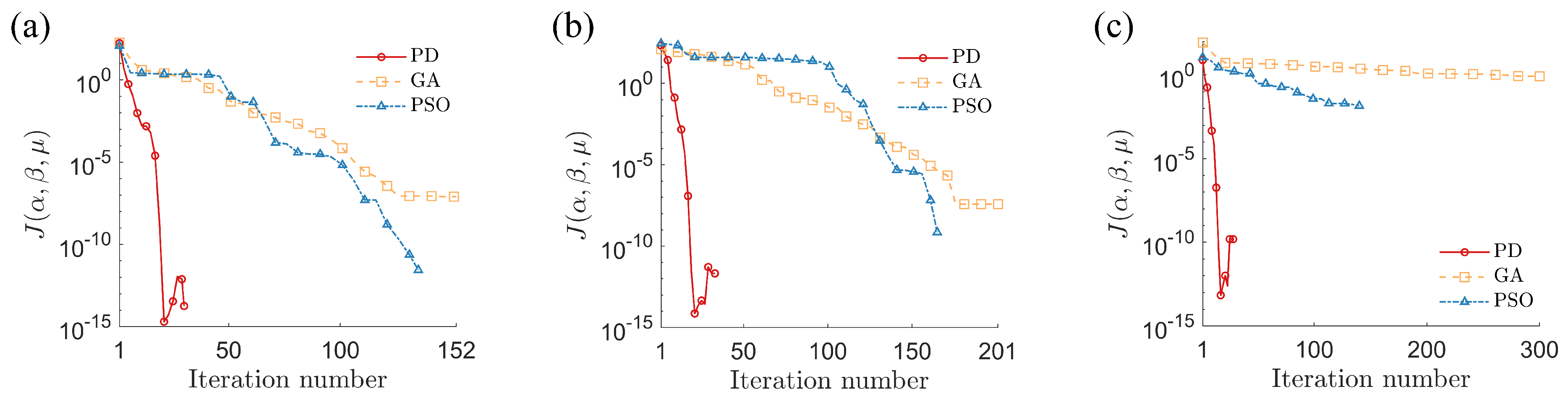
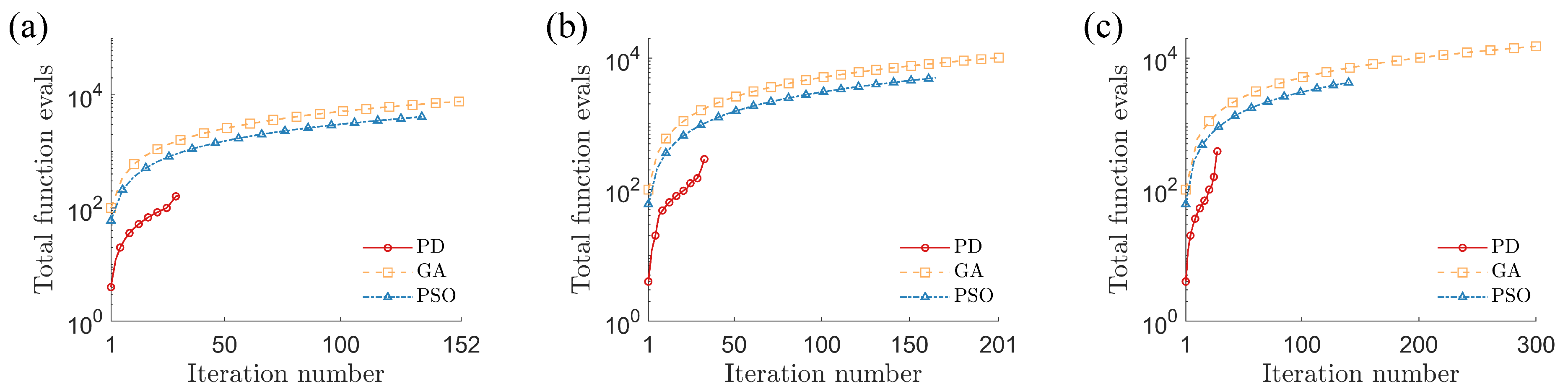
| PD | 30 | 165 | 33 | 291 | 28 | 383 | |||
| GA | 152 | 7650 | 201 | 10,100 | 300 | 15,050 | |||
| PSO | 135 | 4080 | 165 | 4980 | 140 | 4230 | |||
| Noise-to-Signal Ratio | Single-Well | Double-Well | Double-Hump | ||||||
|---|---|---|---|---|---|---|---|---|---|
| (0.5) | (0.5) | (0.1) | (−0.5) | (0.5) | (0.1) | (1.5) | (−0.5) | (0.1) | |
| Parameter | Value |
|---|---|
| 20 kg | |
| kg | |
| kg | |
| 375 N·mm−1 | |
| N·s·mm−1 | |
| 9 N·mm−1 | |
| N·s·mm−1 | |
| a | 95 mm |
| b | mm |
| g | m·s−2 |
| Parameter | Units | Experimental Value | Initial Guess | Bounds |
|---|---|---|---|---|
| Nsmm−3 | ||||
| N·mm−1 | 123 | 1 | ||
| N·mm−1 | ||||
| N·s·mm−1 |
| Strategy | Parameter Estimates | Performance | |||||
|---|---|---|---|---|---|---|---|
| Iterations | Function Evaluations | Error (J) | |||||
| PD | 58 | 1076 | |||||
| PID | 39 | 572 | |||||
| GA | 174 | 8750 | 124 | ||||
| PSO | 135 | 5440 | |||||
| Noise-to-Signal Ratio | () | (123) | (2.5) | () |
|---|---|---|---|---|
| Parameter | Units | Experimental Value | Initial Guess | Bounds | Identified Value |
|---|---|---|---|---|---|
| N·s·cm | 50 | 1 | |||
| N·cm | 25 | 1 | |||
| N·cm | 880 | 1 | |||
| cm | 100 | 1 | |||
| cm | 100 | 1 | |||
| A | — | 120 | 1 | ||
| n | — | 2 | 1 |
| Strategy | Number of Iterations | Number of Function Evaluations | Error (J) |
|---|---|---|---|
| PD | 177 | 2716 | |
| GA | 500 | 100,200 | |
| PSO | 500 | 35,070 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Manikantan, R.; Chakraborty, S.; Uchida, T.K.; Vyasarayani, C.P. Parameter Identification in Nonlinear Mechanical Systems with Noisy Partial State Measurement Using PID-Controller Penalty Functions. Mathematics 2020, 8, 1084. https://doi.org/10.3390/math8071084
Manikantan R, Chakraborty S, Uchida TK, Vyasarayani CP. Parameter Identification in Nonlinear Mechanical Systems with Noisy Partial State Measurement Using PID-Controller Penalty Functions. Mathematics. 2020; 8(7):1084. https://doi.org/10.3390/math8071084
Chicago/Turabian StyleManikantan, R., Sayan Chakraborty, Thomas K. Uchida, and C. P. Vyasarayani. 2020. "Parameter Identification in Nonlinear Mechanical Systems with Noisy Partial State Measurement Using PID-Controller Penalty Functions" Mathematics 8, no. 7: 1084. https://doi.org/10.3390/math8071084