
Forecasting the Passage Time of the Queue of Highly Automated Vehicles Based on Neural Networks in the Services of Cooperative Intelligent Transport Systems

 ,
,  and
and
Abstract
:1. Introduction
2. Related Works
3. Materials and Methods
- Distance between the car and the intersection, m;
- Time until the end of the current phase, s;
- The number of vehicles in the queue before the intersection, units.
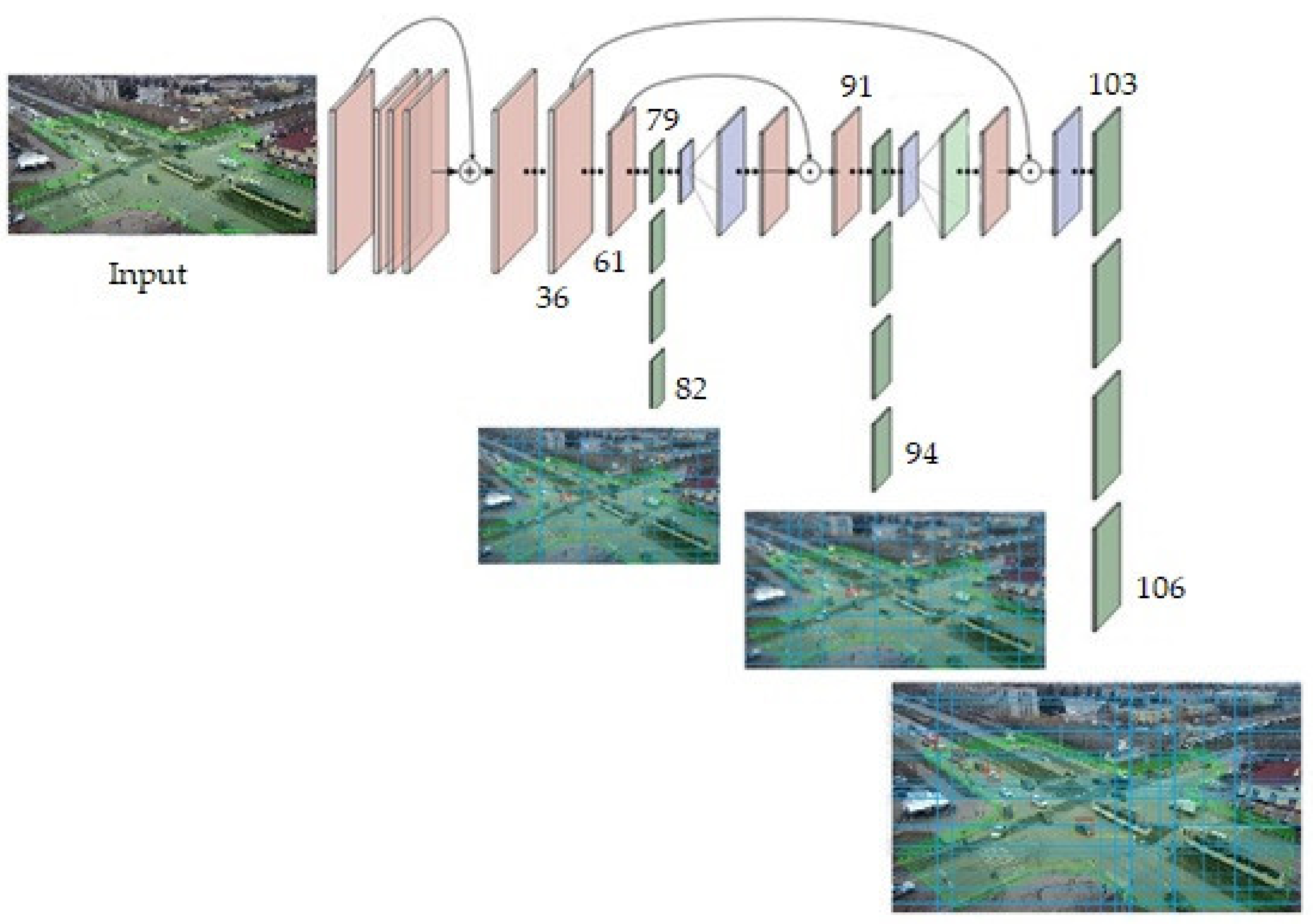
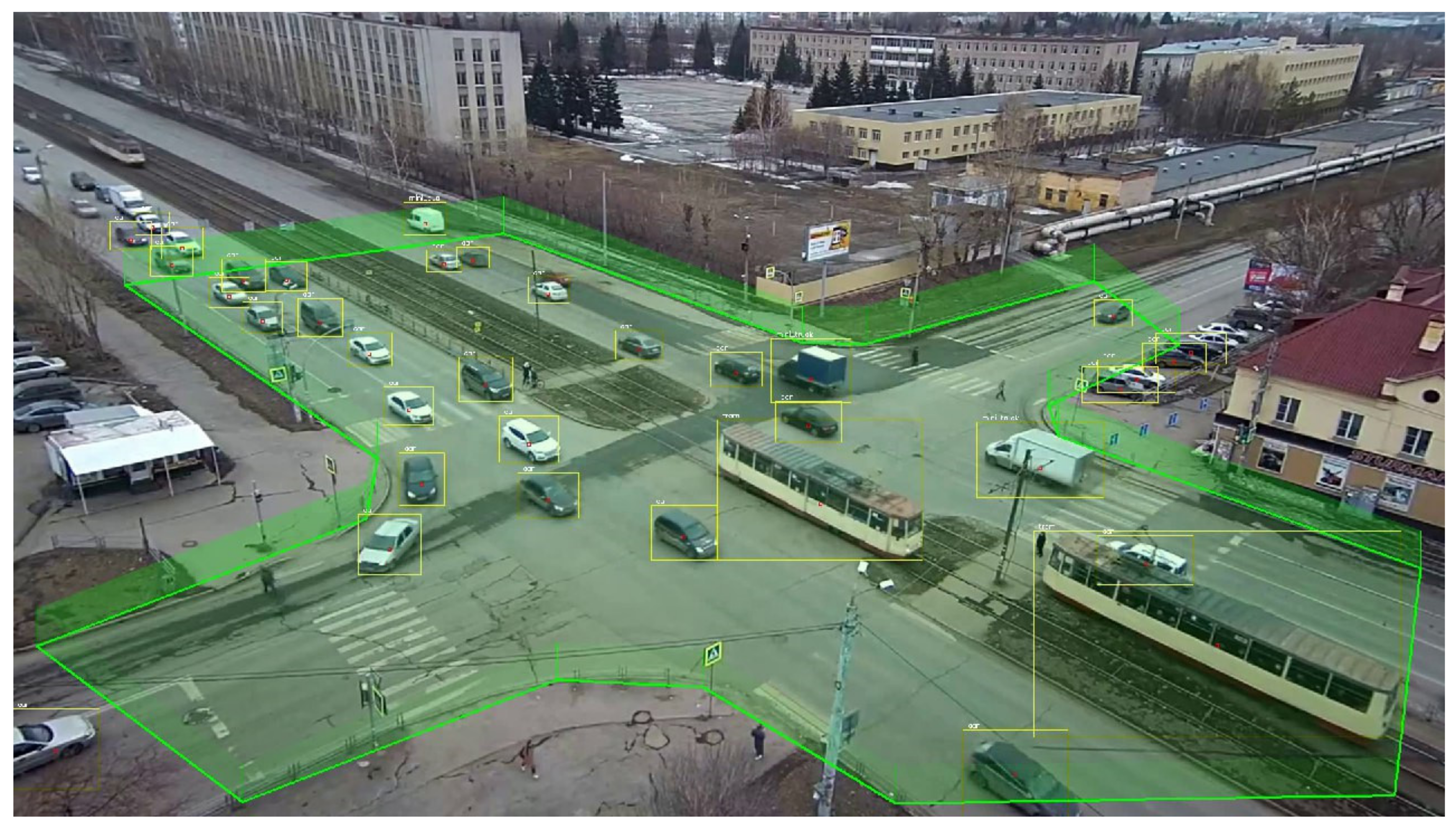
3.1. Recognition and Classification of the Queue of Vehicles Using Neural Networks
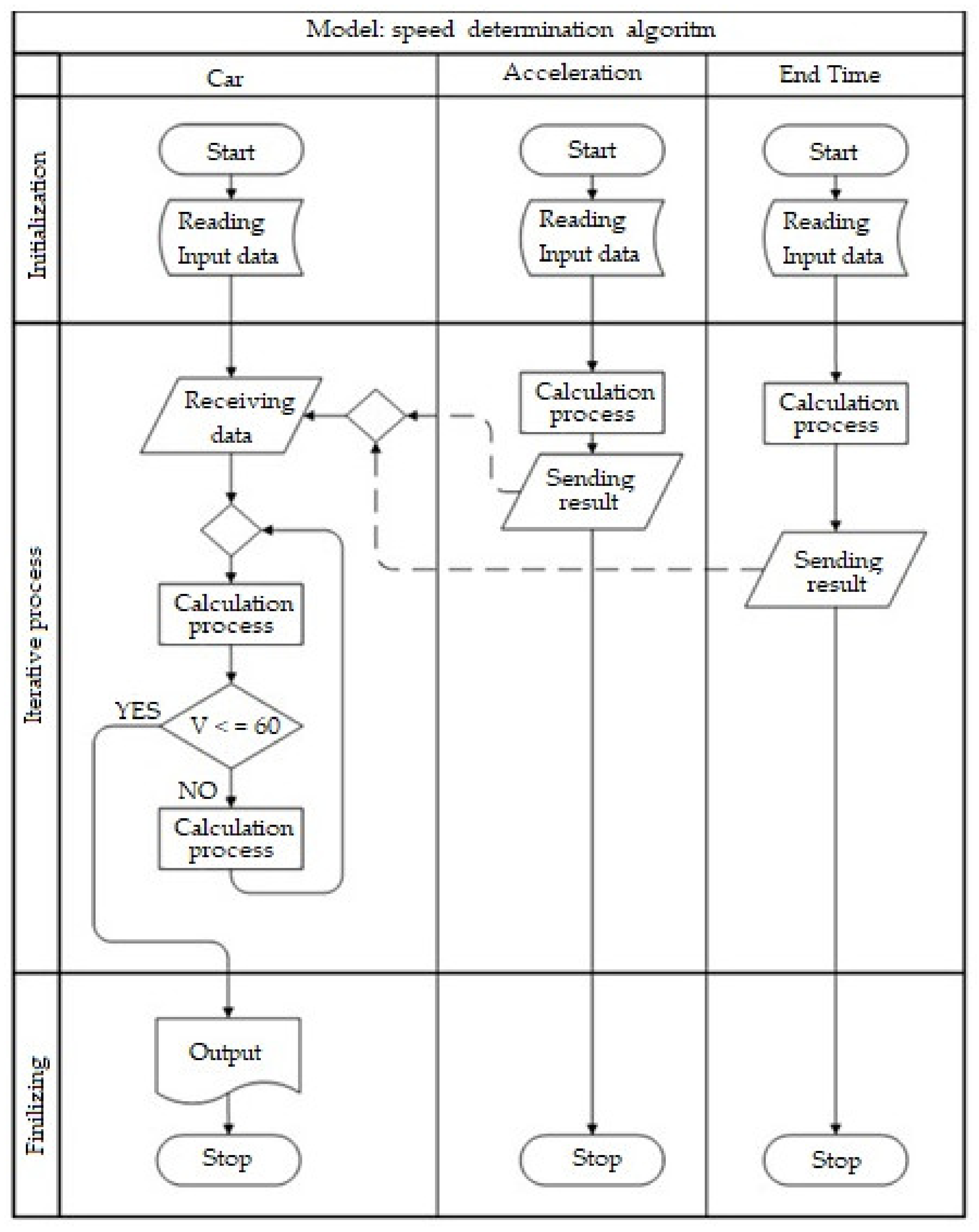
3.2. The Model of the Predictive System and the Algorithm of Its Operation
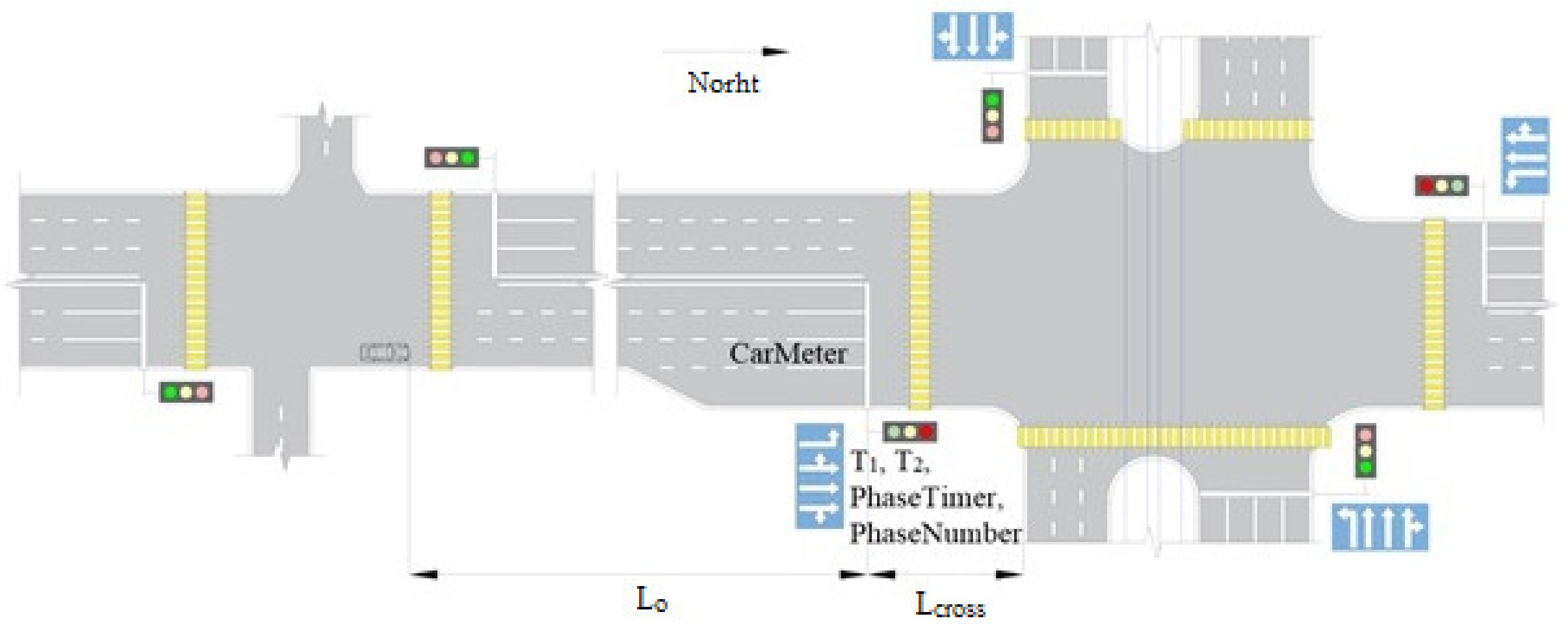
3.3. Experiment Design
- T1 = 24 s;
- T2 = 48 s;
- PhaseNumber = 2;
- PhaseTimer = 48 s;
- CarMeter is selected from the range [0; 10];
- tstart = 0 s;
- Lcross = 24 m;
- L0 is selected from the range [276; 496] meters with a step of 20 m;
- a = 1.5 m/s2.
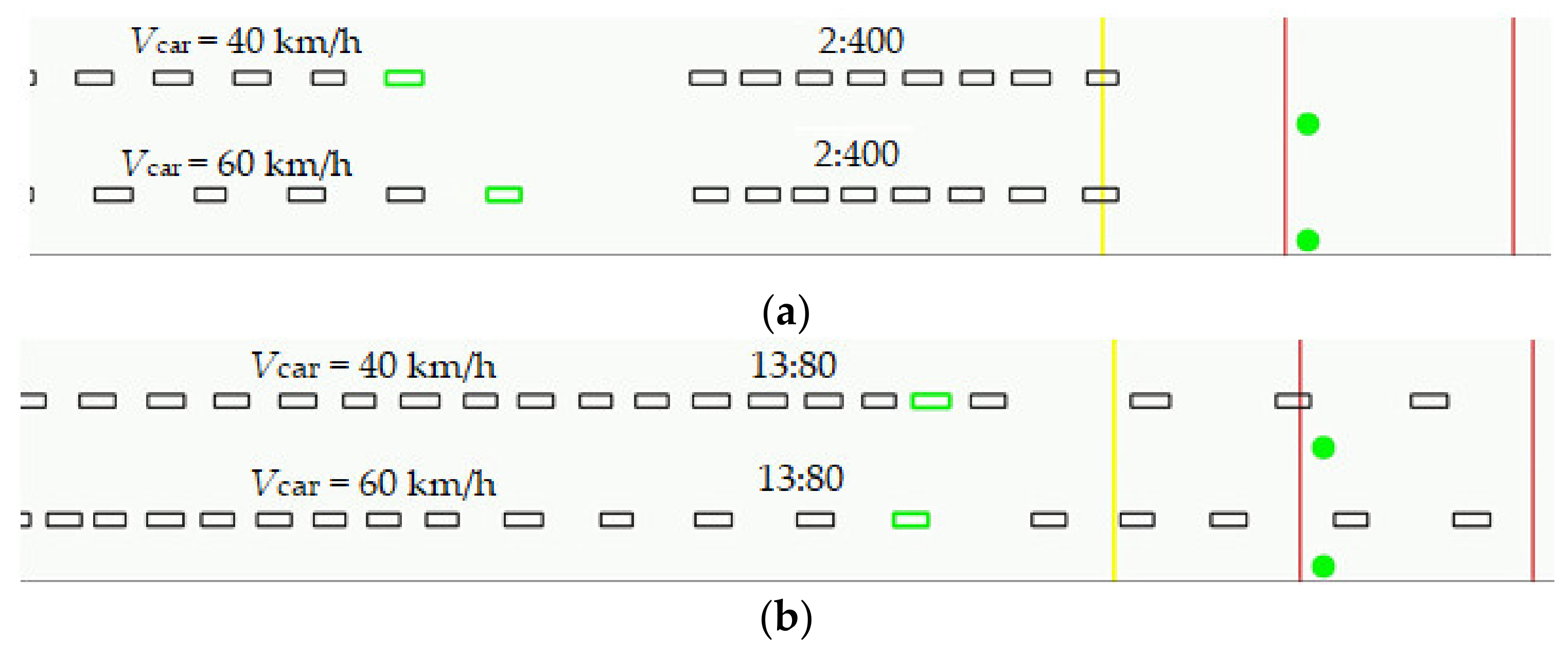
4. Microscopic Simulation of Intersection Traffic Control
- The number of vehicles before the stop line (CarMeter);
- The distance from the start line of crossing the conflicting directions to the first approaching vehicle, meter (S1);
- The speed of the vehicles approaching the intersection (Vcar);
- The distance from the stop line to the start line of crossing the conflicting directions (Lcross)—24 m;
- The distance from the start line to the end line of crossing the conflicting directions—(Lintersec) 30 m;
- The duration of the green traffic light signal (T1)—24 s.
- Vehicle length (lcar = 4.5 ± 0.5 m);
- Minimum distance between the vehicles in the queue (lmin = 1.5–3 m);
- Safe distance between the moving vehicles lsaf = Vcar/2, m.
- Maximum acceleration (amax = 1.5 ± 0.1 m/s2);
- Acceleration during braking (abrak = −5 ± 1 m/s2);
- Delay at the start (d = 800 ± 300 ms);
- Current vehicle speed (Vcar = 30–60 km/h);
- Speed of the vehicles in the queue (Vcar_q = 0);
- Current coordinate of the vehicle in the queue (nn, m); n1 = lmin.
- Current coordinate of the vehicle approaching the intersection (nn_int, m); n1_int = S1.
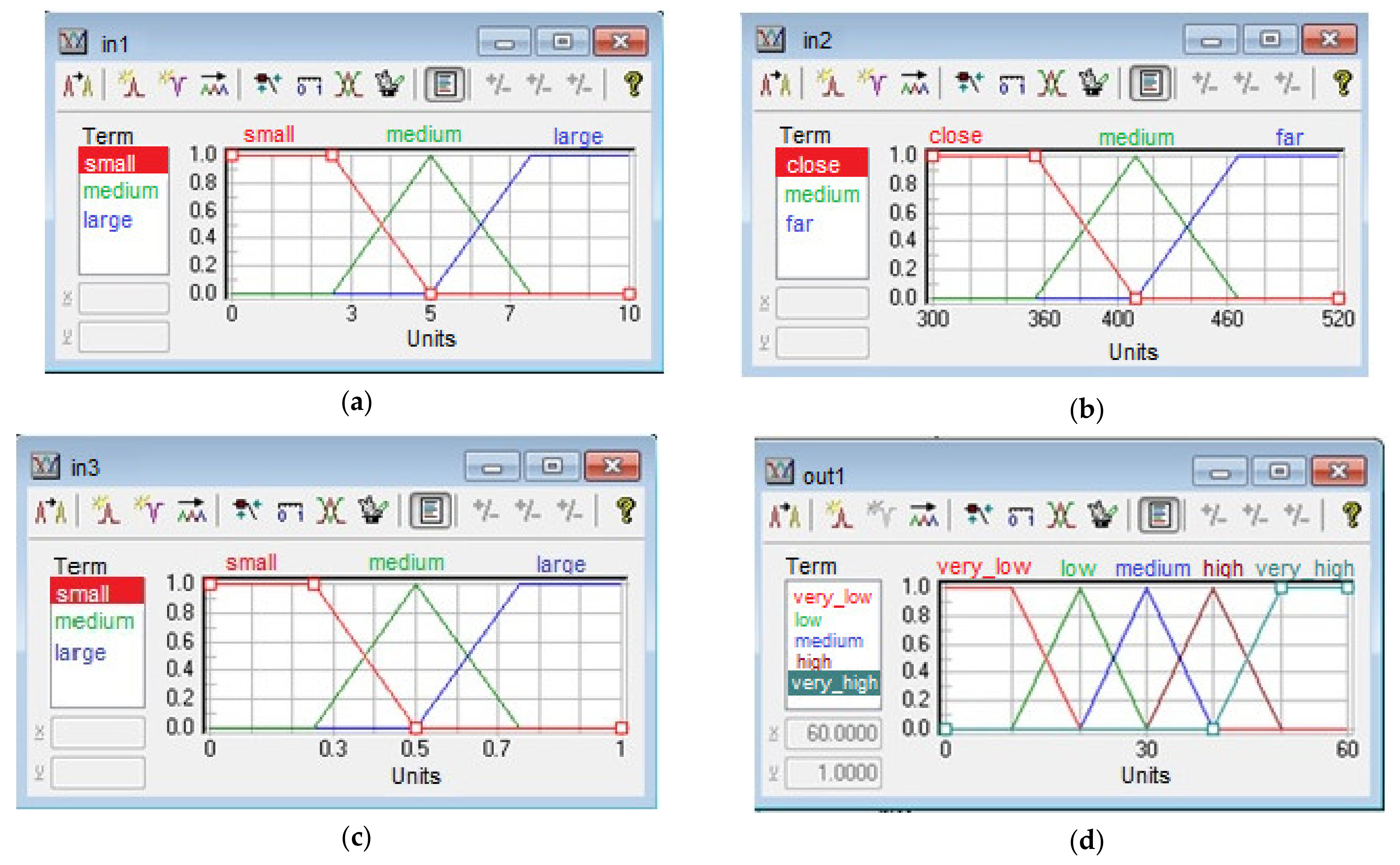
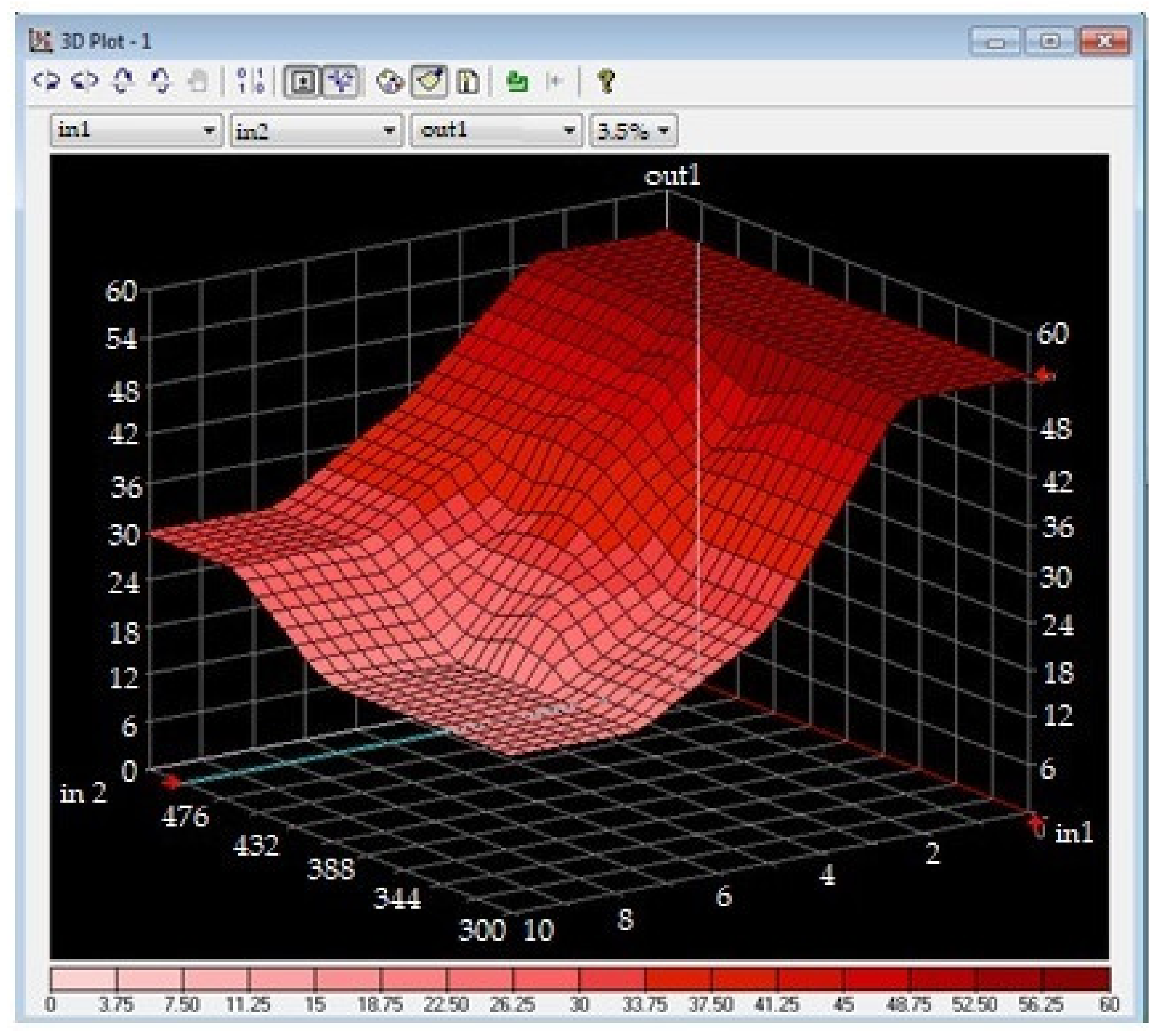
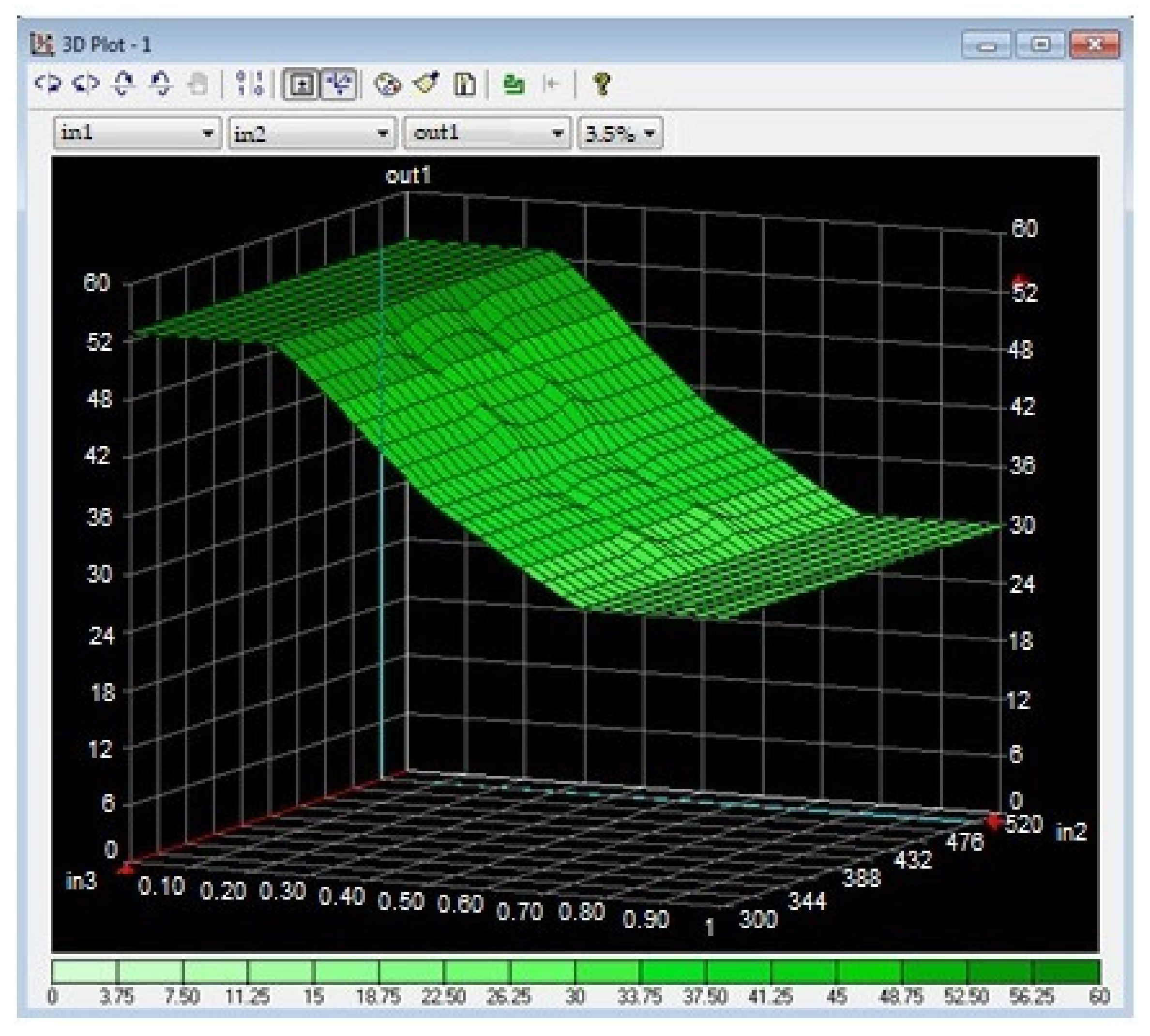
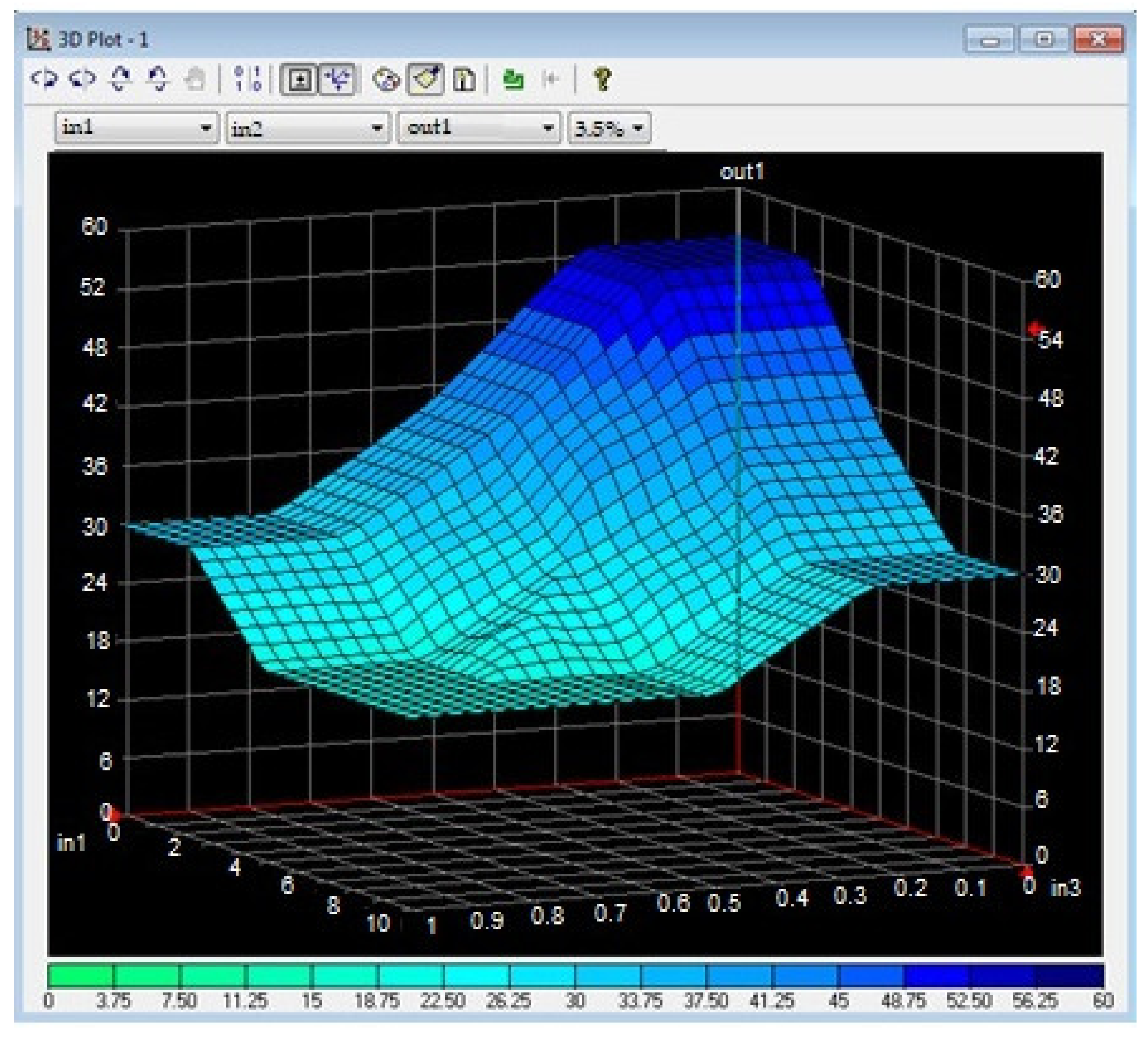
5. Mathematical Modeling of the Movement of Vehicles Based on Methods of Fuzzy Logic
- (1)
- The number of cars waiting in front of the intersection;
- (2)
- The distance of the car to the beginning of the intersection;
- (3)
- The share of large-sized vehicles among those waiting at the intersection.
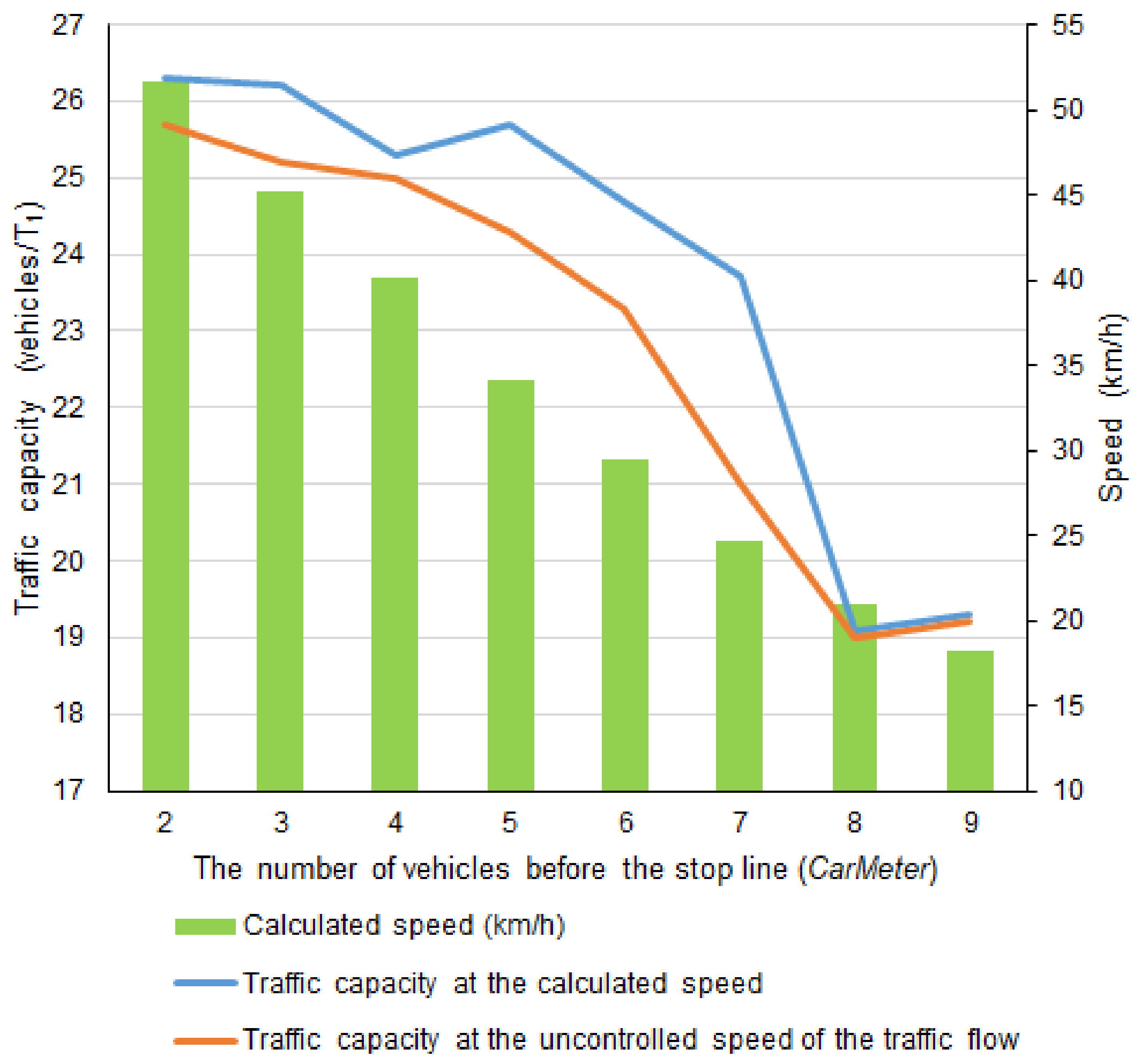
6. Discussion of Modeling Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| L | The path to be traveled by the car. |
| L0 | Distance from the start line to the stop line of the next intersection. |
| Lacceleration | Distance traveled by a car with non-zero acceleration. |
| Lcross | Distance between the stop line and the line where the conflictingdirections intersect the intersection traffic. |
| Lsteady_motion | Distance traveled by a car at a constant speed. |
| PhaseNumber | The number of the traffic light regulation phase currently active. |
| PhaseTimer | Countdown to the end of the current traffic light regulation phase. |
| T1,T2 | Total duration of the first and second phases of regulation of one cycle of traffic light. |
| tacceleration | The time during which the car is moving with acceleration. |
| tend | The time it takes a car to cover a given distance. |
| tstart | The moment the car starts moving. |
| V0 | Initial car speed. |
| Vcar | Car speed. |
| Vsteady_motion | The speed reached by the car while accelerating. |
References
- Novikov, A.N.; Eremin, S.V.; Shevtsova, A.G. Development of a methodology for optimizing the urban route in the metropolitan area. In Proceedings of the International Conference on Digital Solutions for Automotive Industry, Roadway Maintenance and Traffic Control, Cholpon-Ata, Kyrgyzstan, 1 November 2019; Institute of Physics Publishing: Bristol, UK, 2020; Volume 832, p. 012096. [Google Scholar]
- Marusin, A.; Marusin, A.; Danilov, I. A method for assessing the influence of automated traffic enforcement system parameters on traffic safety. Transp. Res. Procedia 2018, 36, 500–506. [Google Scholar] [CrossRef]
- Boryaev, A.; Malygin, I.; Marusin, A. Areas of focus in ensuring the environmental safety of motor transport. Transp. Res. Procedia 2020, 50, 68–76. [Google Scholar] [CrossRef]
- Mavrin, V.; Magdin, K.; Shepelev, V.; Danilov, I. Reduction of environmental impact from road transport using analysis and simulation methods. Transp. Res. Procedia 2020, 50, 451–457. [Google Scholar] [CrossRef]
- Kerimov, M.; Evtiukov, S.; Marusin, A. Model of multi-level system managing automated traffic enforcement facilities recording traffic violations. Transp. Res. Procedia 2020, 50, 242–252. [Google Scholar] [CrossRef]
- Zakharov, D.; Fadyushin, A. The efficiency of some activities for the development of urban infrastructure for public transport, cyclists and pedestrians. Int. J. Transp. Dev. Integr. 2021, 5, 136–149. [Google Scholar] [CrossRef]
- Makarova, I.; Shubenkova, K.; Pashkevich, A. Efficiency assessment of measures to increase sustainability of the transport system. Transport 2021, 36, 123–133. [Google Scholar] [CrossRef]
- Gorodokin, V.; Almetova, Z.; Shepelev, V. Algorithm of signalized crossroads passage within the range of permissive-to-restrictive signals exchange. Transp. Res. Procedia 2017, 20, 225–230. [Google Scholar] [CrossRef]
- Shepelev, V.; Glushkov, A.; Almetova, Z.; Mavrin, V. A Study of the Travel Time of Intersections by Vehicles using Computer Vision. In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems, Virtual, Online, 2–4 May 2020; pp. 653–658. [Google Scholar]
- Makarova, I.; Mavrin, V.; Buyvol, P.; Boyko, A. Digitalization and New Opportunities of Urban Mobility. In Proceedings of the 20th International Conference on Reliability and Statistics in Transportation and Communication, Riga, Latvia, 14–17 October 2020; Volume 195, pp. 559–569. [Google Scholar]
- Phan, C.T.; Pham, D.D.; Tran, H.V.; Tran, T.V.; Huu, P.N. Applying the IoT platform and green wave theory to control intelligent traffic lights system for urban areas in Vietnam. KSII Trans. Internet Inf. Syst. 2019, 13, 34–52. [Google Scholar]
- Kurihara, S.; Ogawa, R.; Shinoda, K.; Suwa, H. Proposed traffic light control mechanism based on multi-agent coordination. J. Adv. Comput. Intell. Intell. Inform. 2016, 20, 803–812. [Google Scholar] [CrossRef]
- Yusuf, A.N.A.; Arifin, A.S.; Zulkifli, F.Y. Recent development of smart traffic lights. IAES Int. J. Artif. Intell. 2021, 10, 224–233. [Google Scholar]
- De Oliveira, L.F.P.; Manera, L.T.; Luz, P.D.G.D. Development of a Smart Traffic Light Control System with Real-Time Monitoring. IEEE Internet Things J. 2021, 8, 3384–3393. [Google Scholar] [CrossRef]
- Sanguesa, J.A.; Barrachina, J.; Fogue, M.; Garrido, P.; Martinez, F.J.; Cano, J.-C.; Calafate, C.T.; Manzoni, P. Sensing Traffic Density Combining V2V and V2I Wireless Communications. Sensors 2015, 15, 31794–31810. [Google Scholar] [CrossRef] [Green Version]
- Suzuki, H.; Marumo, Y. A New Approach to Green Light Optimal Speed Advisory (GLOSA) Systems for High-Density Traffic Flow. In Proceedings of the 21st International Conference on Intelligent Transportation Systems, Maui, HI, USA, 4–7 November 2018. [Google Scholar]
- Benzaman, B.; Sharma, D. Discrete event simulation of a road intersection integrating V2V and V2I features to improve traffic flow. In Proceedings of the Winter Simulation Conference, Las Vegas, NV, USA, 3–6 December 2017. [Google Scholar]
- Li, L.-H.; Gan, J.; Li, W.-Q. A Separation Strategy for Connected and Automated Vehicles: Utilizing Traffic Light Information for Reducing Idling at Red Lights and Improving Fuel Economy. J. Adv. Transp. 2018, 2018, 5679064. [Google Scholar] [CrossRef]
- Coelho, M.C.; Rouphail, N. Assessing the impact of V2V/V2I communication systems on traffic congestion and emissions. In Proceedings of the European Conference on Human Centred Design for Intelligent Transport Systems, Berlin, Germany, 29–30 April 2010. [Google Scholar]
- Lourenco, M.; Souza, F.S.H.; Silva, C.M.; Meneguette, R.I.; Guidoni, D.L. A hybrid V2I and V2V approach for urban traffic management in vehicular networks. In Proceedings of the Latin-American Conference on Communications, Salvador, Brazil, 11–13 November 2019. [Google Scholar]
- Husain, A.A.; Maity, T.; Yadav, R.K. Vehicle detection in intelligent transport system under a hazy environment: A survey. IET Image Proc. 2020, 14, 1–10. [Google Scholar] [CrossRef]
- Howard, B. Hands on with Audi’s Exciting (No, Really) Traffic Light Countdown Timer. 2016. Available online: https://www.extremetech.com/extreme/240264-hands-audis-exciting-no-really-traffic-light-countdown-timer (accessed on 16 August 2021).
- Jeong, H.-J.; Kafle, V.P.; Yoo, H.; Kim, D. HIMALIS-VI: Fast and Secure Mobility Management Scheme Based on HIMALIS for V2I Services in Future Networks. Wireless Pers. Commun. 2014, 78, 2009–2023. [Google Scholar] [CrossRef]
- He, X.; Liu, H.X.; Liu, X. Optimal vehicle speed trajectory on a signalized arterial with consideration of queue. Transp. Res. Part C Emerg. Technol. 2015, 61, 106–120. [Google Scholar] [CrossRef]
- Kerimov, M.; Marusin, A.; Marusin, A.; Danilov, I. Methodological aspects of building mathematical model to evaluate efficiency of automated vehicle traffic control systems. Transp. Res. Procedia 2020, 50, 253–261. [Google Scholar] [CrossRef]
- Safiullin, R.; Fedotov, V.; Marusin, A. Method to evaluate performance of measurement equipment in automated vehicle traffic control systems. Transp. Res. Procedia 2020, 50, 20–27. [Google Scholar] [CrossRef]
- Lu, C.; Aakre, A. A new adaptive cruise control strategy and its stabilization effect on traffic flow. Eur. Transp. Res. Rev. 2018, 10, 49. [Google Scholar] [CrossRef]
- Granda, F.; Azpilicueta, L.; Vargas-Rosales, C.; Lopez-Iturri, P.; Aguirre, E.; Falcone, F. Integration of Wireless Sensor Networks in Intelligent Transportation Systems within Smart City Context. In Proceedings of the IEEE Antennas and Propagation Society International Symposium and USNC/URSI National Radio Science Meeting, Boston, MA, USA, 8–13 July 2018. [Google Scholar]
- Grumert, E.F.; Tapani, A.; Ma, X. Characteristics of variable speed limit systems. Eur. Transp. Res. Rev. 2018, 10, 21. [Google Scholar] [CrossRef]
- Sjöberg, K.; Andres, P.; Buburuzan, T.; Brakemeier, A. Cooperative Intelligent Transport Systems in Europe: Current Deployment Status and Outlook. IEEE Veh. Technol. Mag. 2017, 12, 89–97. [Google Scholar] [CrossRef]
- Glushkov, A.; Shepelev, V. Development of Reliable Models of Signal-Controlled Intersections. Transp. Telecommun. J. 2021, 22, 417–424. [Google Scholar] [CrossRef]
- Zhang, S.; Wu, G.; Costeira, J.P.; Moura, J.M. Table of contents. In Proceedings of the Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Peppa, M.V.; Bell, D.; Komar, T.; Xiao, W. Urban traffic flow analysis based on deep learning car detection from CCTV image series. In Proceedings of the ISPRS TC IV Mid-Term Symposium on 3D Spatial Information Science, Delft, The Netherlands, 1–5 October 2018. [Google Scholar]
- Zhang, S.; Wu, G.; Costeira, J.P.; Moura, J.M. FCN-rLSTM: Deep spatio-temporal neural networks for vehicle counting in city cameras. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; Institute of Electrical and Electronics Engineers Inc: Piscataway, NJ, USA, 2017. [Google Scholar]
- Bewley, A.; Ge, Z.; Ott, L.; Ramos, F.; Upcroft, B. Simple online and realtime tracking. In Proceedings of the IEEE International Conference on Image Processing, Phoenix, AZ, USA, 25–28 September 2016; IEEE Computer Society: Piscataway, NJ, USA, 2016. [Google Scholar]
- Khazukov, K.; Shepelev, V.; Karpeta, T.; Shabiev, S.; Slobodin, I.; Charbadze, I.; Alferova, I. Real-time monitoring of traffic parameters. J. Big Data 2020, 7, 84. [Google Scholar] [CrossRef]
- Shepelev, V.; Aliukov, S.; Nikolskaya, K.; Shabiev, S. The capacity of the road network: Data collection and statistical analysis of traffic characteristics. Energies 2020, 13, 1765. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Chang, G.L. An arterial signal optimization model for intersections experiencing queue spillback and lane blockage. Transp. Res. Part C Emerg. Technol. 2011, 19, 30–144. [Google Scholar] [CrossRef]
- Cohen, S.L.; Liu, C.C. Bandwidth-constrained transyt signal-optimization program. Transp. Res. Rec. 1986, 1057, 1–7. [Google Scholar]
- Gartner, N.H.; Assman, S.F.; Lasaga, F.; Hou, D.L. A multi-band approach to arterial traffic signal optimization. Transp. Res. Part B Methodol. 1991, 25, 55–74. [Google Scholar] [CrossRef]
- Chaudhary, N.A.; Messer, C.J. PASSER IV: A program for optimizing signal timing in grid networks. Transp. Res. Rec. 1993, 1421, 82–93. [Google Scholar]
- Wallace, C.E.; Courage, K.G.; Reaves, D.P.; Shoene, G.W.; Euler, G.W.; Wilbur, A. TRANSYT-7F User’s Manual: Technical Report; University of Florida: Gainesville, FL, USA, 1988. [Google Scholar]
- Wong, S.C. Group-based optimisation of signal timings using the TRANSYT traffic model. Transp. Res. Part B 1996, 30, 217–244. [Google Scholar] [CrossRef]
- Robertson, D.I.; Bretherton, R.D. Optimizing networks of traffic signals in real-time: The SCOOT method. IEEE Trans. Veh. Technol. 1991, 40, 11–15. [Google Scholar] [CrossRef]
- Zhen, Q.; Qian, Z.; Huapu, L.; Zhiheng, L. Intersection design and timing optimization based on SCOOT information platform. In Proceedings of the Intelligent Transportation Society of America—12th World Congress on Intelligent Transport Systems, San Francisco, CA, USA, 6–10 November 2005; Institute of Transportation Engineering, Tsinghua University: Beijing, China, 2009. [Google Scholar]
- Yu, Q.; Jun, H.J.; Li, W.; Jian, R.; Shi, J.-J. SCOOT improvement project and measures of effect in Beijing. In Proceedings of the Intelligent Transportation Society of America—12th World Congress on Intelligent Transport Systems, San Francisco, CA, USA, 6–10 November 2005; Institute of Transportation Engineering, Tsinghua University: Beijing, China, 2009. [Google Scholar]
- Gartner, N. OPAC: A demand-responsive strategy for traffic signal control. Transp. Res. Rec. 1983, 906, 75–81. [Google Scholar]
- Mirchandani, P.; Wang, F.Y. RHODES to intelligent transportation systems. IEEE Intell. Syst. 2005, 20, 10–15. [Google Scholar] [CrossRef]
- Pedroso, L.; Batista, P. Decentralized store-and-forward based strategies for the signal control problem in large-scale congested urban road networks. Transp. Res. Part C Emerg. Technol. 2021, 132, 103412. [Google Scholar] [CrossRef]
- Xu, Y.; Li, D.; Xi, Y.; Lin, S. Path-based adaptive traffic signal control with a mixed backpressure index. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Indianapolis, IN, USA, 19–22 September 2021. [Google Scholar]
- Aboudolas, K.; Papageorgiou, M.; Kosmatopoulos, E. Store-and-forward based methods for the signal control problem in large-scale congested urban road networks. Transp. Res. Part C Emerg. Technol. 2009, 17, 163–174. [Google Scholar] [CrossRef] [Green Version]
- Messmer, A.; Papageorgiou, M. METANET: A macroscopic simulation program for motorway networks. Traffic Eng. Control 1990, 31, 466–470. [Google Scholar]
- Papamichail, I.; Messmer, A.; Wang, Y. Traffic Simulation with METANET; International Series in Operations Research & Management Science; Springer: New York, NY, USA, 2010; pp. 399–430. [Google Scholar]
- Shelby, S.G. Single-intersection evaluation of real-time adaptive traffic signal control algorithms. Transp. Res. Rec. 2004, 1867, 183–192. [Google Scholar] [CrossRef]
- Chai, L.; Cai, B.; ShangGuan, W.; Wang, J.; Wang, H. Connected and autonomous vehicles coordinating approach at intersection based on space–time slot. Transportmetr. A Transport Sci. 2018, 14, 929–951. [Google Scholar] [CrossRef]
- Németh, B.; Gáspár, P.; Szőcs, D.; Mihály, A. Design of the optimal motions of autonomous vehicles in intersections through neural networks. IFAC-PapersOnLine 2018, 51, 19–24. [Google Scholar] [CrossRef]
- Reyes, A.; Barrado, C.; López, M.; Excelente, C. Vehicle density in VANET applications. J. Ambient Intell. Smart Environ. 2014, 6, 469–481. [Google Scholar] [CrossRef] [Green Version]
- Kandali, K.; Bennis, H. Performance assessment of AODV, DSR and DSDV in an urban VANET scenario. Adv. Intell. Sys. Comput. 2019, 915, 98–109. [Google Scholar]
- Jayapal, C.; Roy, S.S. Road traffic congestion management using VANET. In Proceedings of the International Conference on Advances in Human Machine Interaction, Kodigehalli, India, 3–5 March 2016. [Google Scholar]
- Kwatirayo, S.; Almhana, J.; Liu, Z. Optimizing intersection traffic flow using VANET. In Proceedings of the IEEE International Conference on Sensing, Communications and Networking, New Orleans, LA, USA, 24–27 June 2013. [Google Scholar]
- Kalinic, M.; Krisp, J.M. Fuzzy inference approach in traffic congestion detection. Ann. GIS 2019, 25, 329–336. [Google Scholar] [CrossRef]
- Lin, H.; Aye, K.M.; Tun, H.M.; Theingi Naing, Z.M. Design and construction of intelligent traffic light control system using fuzzy logic. AIP Conf. Proc. 2008, 1052, 237–239. [Google Scholar]
- Comert, G. Effect of stop line detection in queue length estimation at traffic signals from probe vehicles data. Eur. J. Oper. Res. 2013, 226, 67–76. [Google Scholar] [CrossRef]
- Ramezani, M.; Geroliminis, N. Queue profile estimation in congested urban networks with probe data. Comput. Aided Civ. Infrastruct. Eng. 2015, 30, 414–432. [Google Scholar] [CrossRef]
- Li, F.; Tang, K.; Yao, J.; Li, K. Real-time queue length estimation for signalized intersections using vehicle trajectory data. Transp. Res. Rec. 2017, 2623, 49–59. [Google Scholar] [CrossRef]
- Tan, C.; Yao, J.; Tang, K.; Sun, J. Cycle-based queue length estimation for signalized intersections using sparse vehicle trajectory data. IEEE Intell. Syst. 2021, 22, 91–106. [Google Scholar] [CrossRef]
- Jeff Ban, X.; Hao, P.; Sun, Z. Real time queue length estimation for signalized intersections using travel times from mobile sensors. Transp. Res. Part C Emerg. Technol. 2011, 19, 1133–1156. [Google Scholar] [CrossRef]
- Qi, Z.; Li, M.; Liu, C.; Zhao, M.; Long, M. A measurement method for vehicle queue length of intersection based on image processing. In Proceedings of the Eighth International Conference on Image Processing Theory, Tools and Applications, Xi’an, China, 7–10 November 2018; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Do, L.N.N.; Taherifar, N.; Vu, H.L. Survey of neural network-based models for short-term traffic state prediction. Wiley Interdiscip. Rev. Data Min. Knowl. Discov. 2019, 9, e1285. [Google Scholar] [CrossRef] [Green Version]
- Cui, C.; Shin, J.; Lee, H. Real-time traffic signal learning control using BPNN based on predictions of the probabilistic distribution of standing vehicles. Artif. Life Rob. 2010, 15, 58–61. [Google Scholar] [CrossRef]
- Luo, X.; Li, D.; Yang, Y.; Zhang, S. Spatiotemporal traffic flow prediction with KNN and LSTM. J. Adv. Transp. 2019, 2019, 4145353. [Google Scholar] [CrossRef] [Green Version]
- Niittymäki, J.; Nevala, R. Fuzzy adaptive traffic signal control—Principles and results. In Proceedings of the Joint 9th IFSA World Congress and 20th NAFIPS International Conference, Vancouver, BC, Canada, 25–28 July 2001; IEEE: Piscataway, NJ, USA, 2002. [Google Scholar]
- Agrawal, A.; Paulus, R. Improving traffic and emergency vehicle clearance at congested intersections using fuzzy inference engine. Int. J. Electr. Comput. Eng. 2021, 11, 3176–3185. [Google Scholar]
- Xu, M.; Chai, J.; Yan, Y.; Qu, X. Multi-agent fuzzy-based transit signal priority control for traffic network considering conflicting priority requests. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]
- Mittal, U.; Chawla, P. Neuro-fuzzy based adaptive traffic light management system. In Proceedings of the 8th International Conference on Reliability, Infocom Technologies and Optimization (Trends and Future Directions), Noida, India, 4–5 June 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Fedorov, A.; Nikolskaia, K.; Ivanov, S.; Shepelev, V.; Minbaleev, A. Traffic flow estimation with data from a video surveillance camera. J. Big Data 2019, 6, 73. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Menshov, S.; Wang, Y.; Zhdanov, A.; Varlamov, E.; Zhdanov, D. Simple online and realtime tracking people with new “soft-iou” metric. In Proceedings of the SPIE—The International Society for Optical Engineering, Beijing, China, 7–9 July 2019. [Google Scholar]
- Maher, A.; Taha, H.; Zhang, B. Realtime multi-aircraft tracking in aerial scene with deep orientation network. J. Real-Time Image Process. 2018, 15, 495–507. [Google Scholar] [CrossRef]
- Wei, Y.; Song, N.; Ke, L.; Chang, M.; Lyu, S. Street object detection/tracking for AI city traffic analysis. In Proceedings of the IEEE SmartWorld Ubiquitous Intelligence and Computing, Advanced and Trusted Computed, Scalable Computing and Communications, Cloud and Big Data Computing, Internet of People and Smart City Innovation, San Francisco, CA, USA, 4–8 April 2017. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the 29th IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016. [Google Scholar]
- Kacimi, M.A.; Guenounou, O.; Brikh, L.; Yahiaoui, F.; Hadid, N. New mixed-coding PSO algorithm for a self-adaptive and automatic learning of Mamdani fuzzy rules. Eng. Appl. Artif. Intell. 2020, 89, 103417. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Car No. | Tstart (sec) | L (m) | Tend (s) |
|---|---|---|---|
| 1 | 0.3 | 24.1 | 6.1 |
| 2 | 1.9 | 28.7 | 8.6 |
| 3 | 3.2 | 33.3 | 11.1 |
| 4 | 4.6 | 38.2 | 13.6 |
| 5 | 6.2 | 42.8 | 15.8 |
| 6 | 8.0 | 47.6 | 18.6 |
| 7 | 9.8 | 52.3 | 20.5 |
| 8 | 10.6 | 57.0 | 21.2 |
| 9 | 12.5 | 61.7 | 23.2 |
| L (m) | Number of CarMeter Vehicles | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
| 300 | 23.58 | 20.30 | 19.36 | 18.50 | 17.72 | 17.09 | 16.35 | 15.88 | 15.71 | 9.07 | 9.07 |
| 320 | 25.23 | 21.70 | 20.69 | 19.77 | 18.94 | 18.26 | 17.46 | 16.96 | 16.79 | 9.68 | 9.68 |
| 340 | 26.90 | 23.12 | 22.03 | 21.05 | 20.16 | 19.43 | 18.58 | 18.05 | 17.86 | 10.29 | 10.29 |
| 360 | 28.58 | 24.54 | 23.38 | 22.34 | 21.38 | 20.61 | 19.71 | 19.14 | 18.94 | 10.90 | 10.90 |
| 380 | 30.27 | 25.96 | 24.74 | 23.63 | 22.61 | 21.79 | 20.84 | 20.23 | 20.02 | 11.51 | 11.51 |
| 400 | 31.98 | 27.40 | 26.10 | 24.92 | 23.85 | 22.98 | 21.97 | 21.33 | 21.10 | 12.12 | 12.12 |
| 420 | 33.69 | 28.84 | 27.47 | 26.22 | 25.09 | 24.17 | 23.10 | 22.43 | 22.19 | 12.73 | 12.73 |
| 440 | 35.42 | 30.29 | 28.84 | 27.53 | 26.33 | 25.37 | 24.24 | 23.53 | 23.28 | 13.34 | 13.34 |
| 460 | 37.17 | 31.75 | 30.22 | 28.84 | 27.58 | 26.57 | 25.38 | 24.64 | 24.38 | 13.95 | 13.95 |
| 480 | 38.93 | 33.22 | 31.61 | 30.16 | 28.84 | 27.77 | 26.53 | 25.75 | 25.48 | 14.57 | 14.57 |
| 500 | 40.70 | 34.69 | 33.00 | 31.48 | 30.10 | 28.98 | 27.68 | 26.86 | 26.58 | 15.18 | 15.18 |
| 520 | 42.49 | 36.18 | 34.41 | 32.81 | 31.36 | 30.20 | 28.83 | 27.98 | 27.68 | 15.80 | 15.80 |
| No. | IF | THEN | |||
|---|---|---|---|---|---|
| in1 | in2 | in3 | DoS | Out1 | |
| 1 | Small | Close | Small | 1.00 | Very high |
| 2 | Small | Close | Medium | 1.00 | High |
| 3 | Small | Close | Large | 1.00 | Medium |
| 4 | Small | Medium | Small | 1.00 | Very high |
| 5 | Small | Medium | Medium | 1.00 | High |
| 6 | Small | Medium | Large | 1.00 | Medium |
| 7 | Small | Far | Small | 1.00 | Very high |
| 8 | Small | Far | Medium | 1.00 | High |
| 9 | Small | Far | Large | 1.00 | Medium |
| 10 | Medium | Close | Small | 1.00 | Medium |
| 11 | Medium | Close | Medium | 1.00 | Low |
| 12 | Medium | Close | Large | 1.00 | Very low |
| 13 | Medium | Medium | Small | 1.00 | High |
| 14 | Medium | Medium | Medium | 1.00 | Medium |
| 15 | Medium | Medium | Large | 1.00 | Low |
| 16 | Medium | Far | Small | 1.00 | High |
| 17 | Medium | Far | Medium | 1.00 | Medium |
| 18 | Medium | Far | Large | 1.00 | Low |
| 19 | Large | Close | Small | 1.00 | Low |
| 20 | Large | Close | Medium | 1.00 | Very low |
| 21 | Large | Close | Large | 1.00 | Very low |
| 22 | Large | Medium | Small | 1.00 | Low |
| 23 | Large | Medium | Medium | 1.00 | Low |
| 24 | Large | Medium | Large | 1.00 | Very low |
| 25 | Large | Far | Small | 1.00 | Medium |
| 26 | Large | Far | Medium | 1.00 | Low |
| 27 | Large | Far | Large | 1.00 | Low |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shepelev, V.; Zhankaziev, S.; Aliukov, S.; Varkentin, V.; Marusin, A.; Marusin, A.; Gritsenko, A. Forecasting the Passage Time of the Queue of Highly Automated Vehicles Based on Neural Networks in the Services of Cooperative Intelligent Transport Systems. Mathematics 2022, 10, 282. https://doi.org/10.3390/math10020282
Shepelev V, Zhankaziev S, Aliukov S, Varkentin V, Marusin A, Marusin A, Gritsenko A. Forecasting the Passage Time of the Queue of Highly Automated Vehicles Based on Neural Networks in the Services of Cooperative Intelligent Transport Systems. Mathematics. 2022; 10(2):282. https://doi.org/10.3390/math10020282
Chicago/Turabian StyleShepelev, Vladimir, Sultan Zhankaziev, Sergey Aliukov, Vitalii Varkentin, Aleksandr Marusin, Alexey Marusin, and Aleksandr Gritsenko. 2022. "Forecasting the Passage Time of the Queue of Highly Automated Vehicles Based on Neural Networks in the Services of Cooperative Intelligent Transport Systems" Mathematics 10, no. 2: 282. https://doi.org/10.3390/math10020282