
Deformation and Response Analysis of Spur Gear Pairs with Flexible Ring Gears and Localized Spalling Faults

 ,
,
Abstract
:1. Introduction
2. The Model of Spur Gear Pairs with Flexible Ring Gears
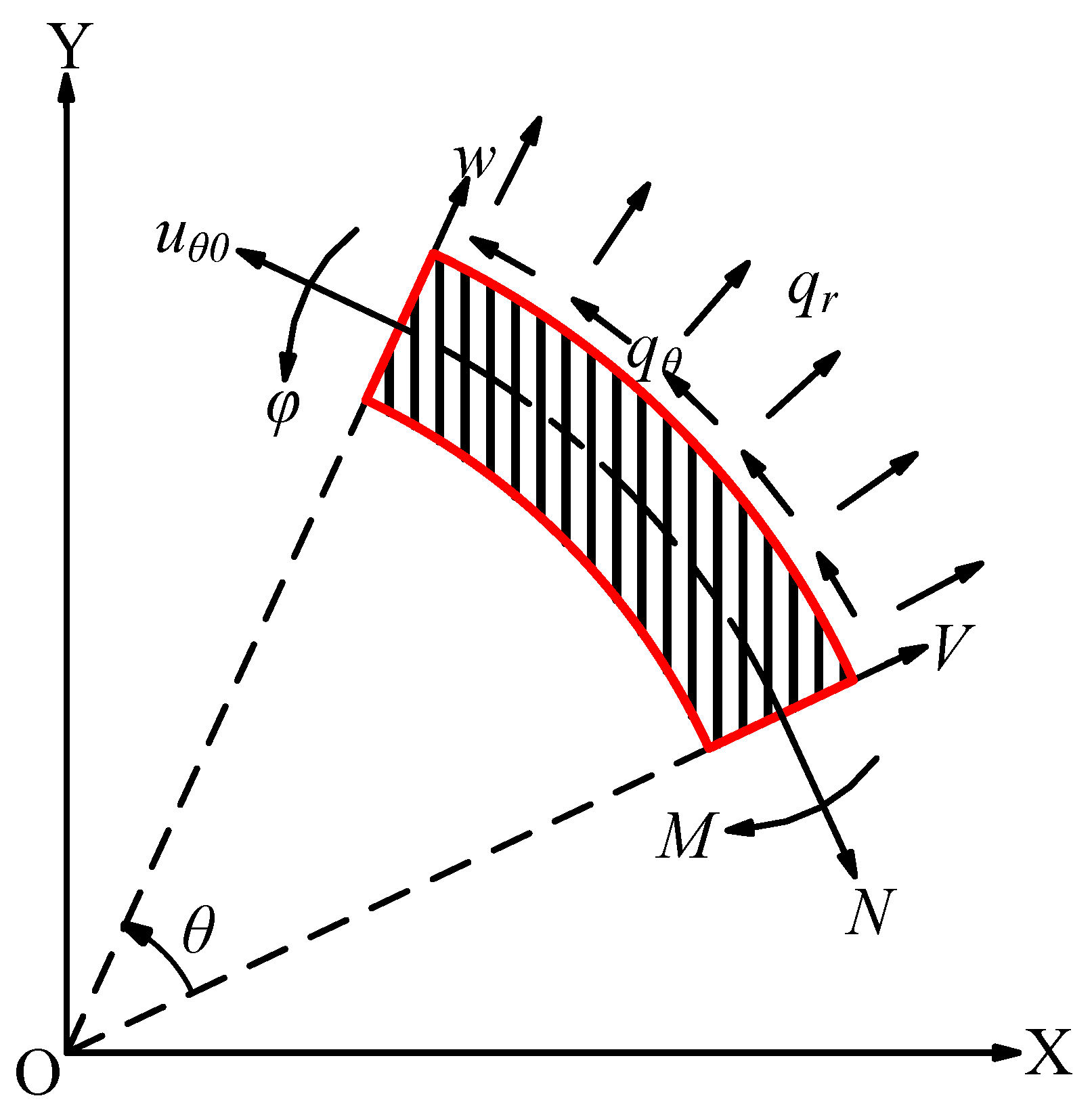
2.1. Curved Timoshenko Beam
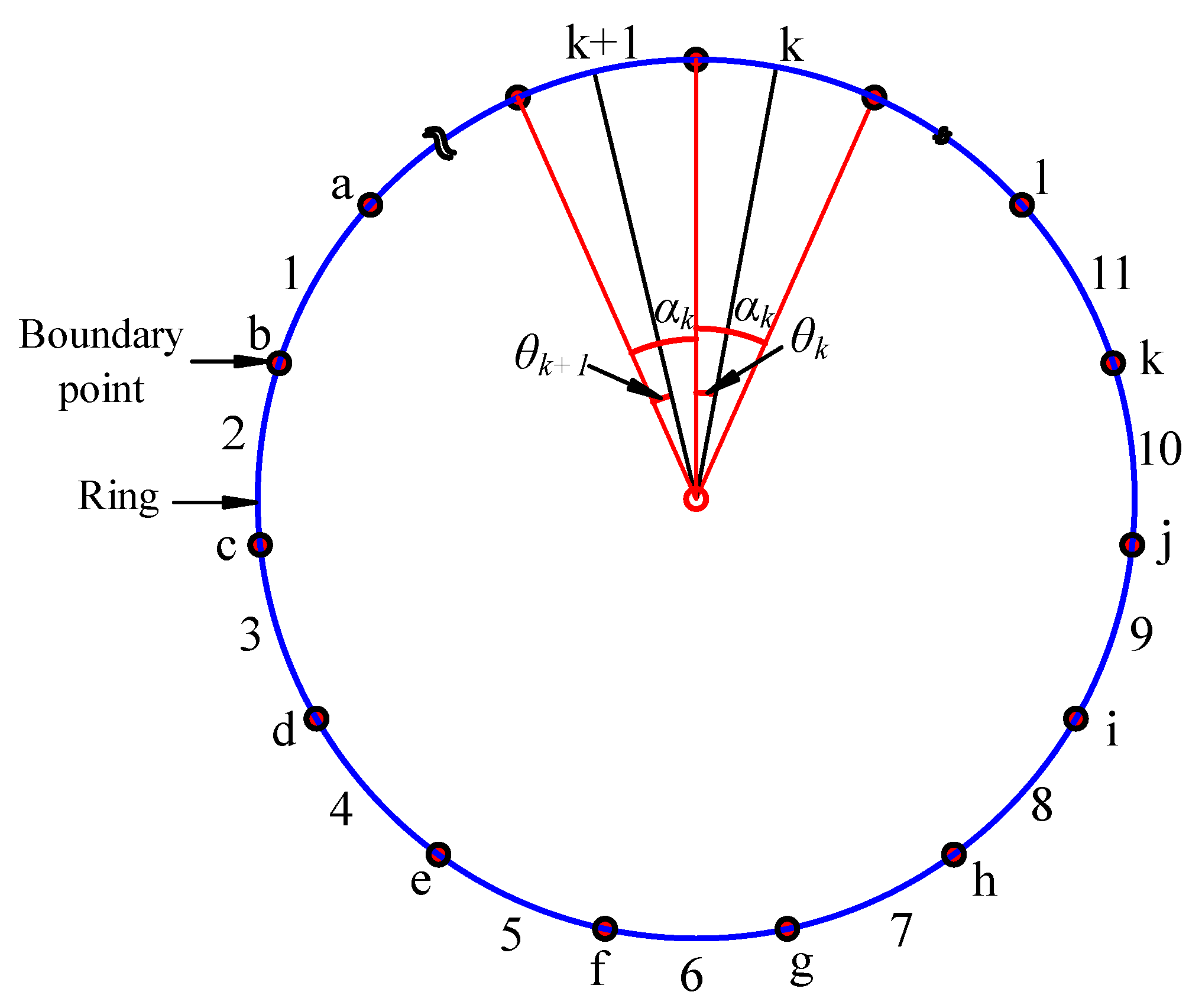
2.2. Discretization of Ring Gears
- (1)
- When the actual meshing point of gear pairs is close to the k-th section of ring gears, the ring gear of this section is supported by external force, and the boundary conditions are:
- (2)
- Free support is used in the remaining (m−1) ring gears, and their boundary conditions are:where the symbol ‘+’ indicates the lower boundary of ring gear segments; the symbol ‘−’ indicates the upper boundary of the ring gear segments. The rotation of the low-speed gear ring gear causes the angular position of each ring gear segment to change from time to time. The range of calculated angles of the k-th ring gear segment is [], where, is the initial phase of the ring gears and is the rotational angular displacement of low-speed gears.
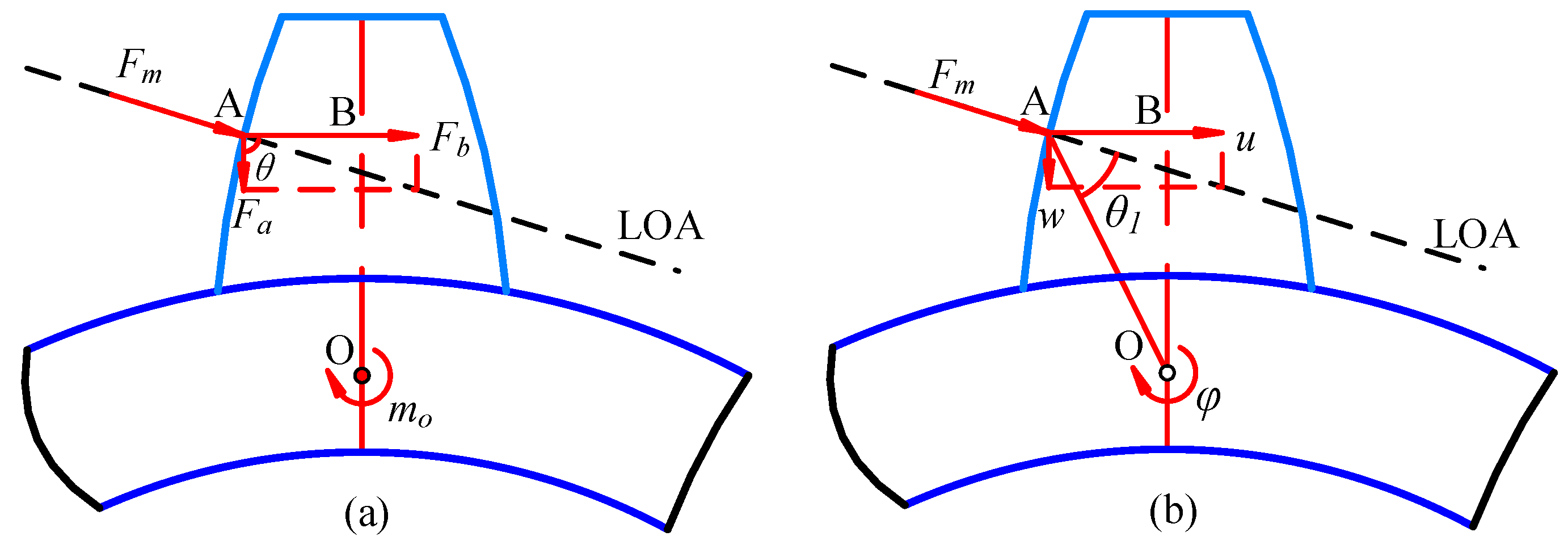
2.3. The Model for TVMS
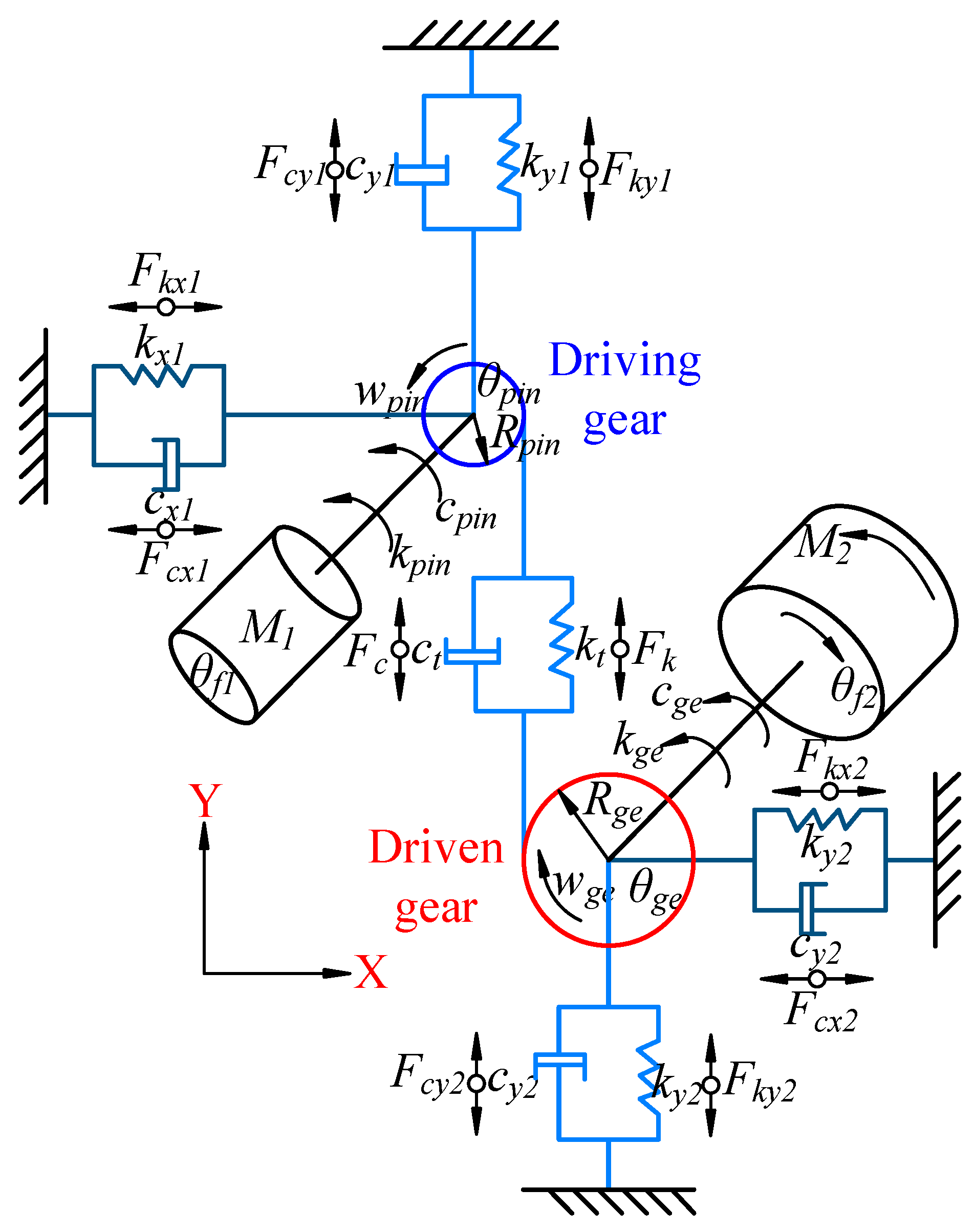
2.4. System Equations of the Gear Pairs
2.5. Model Solving
3. Result Analysis
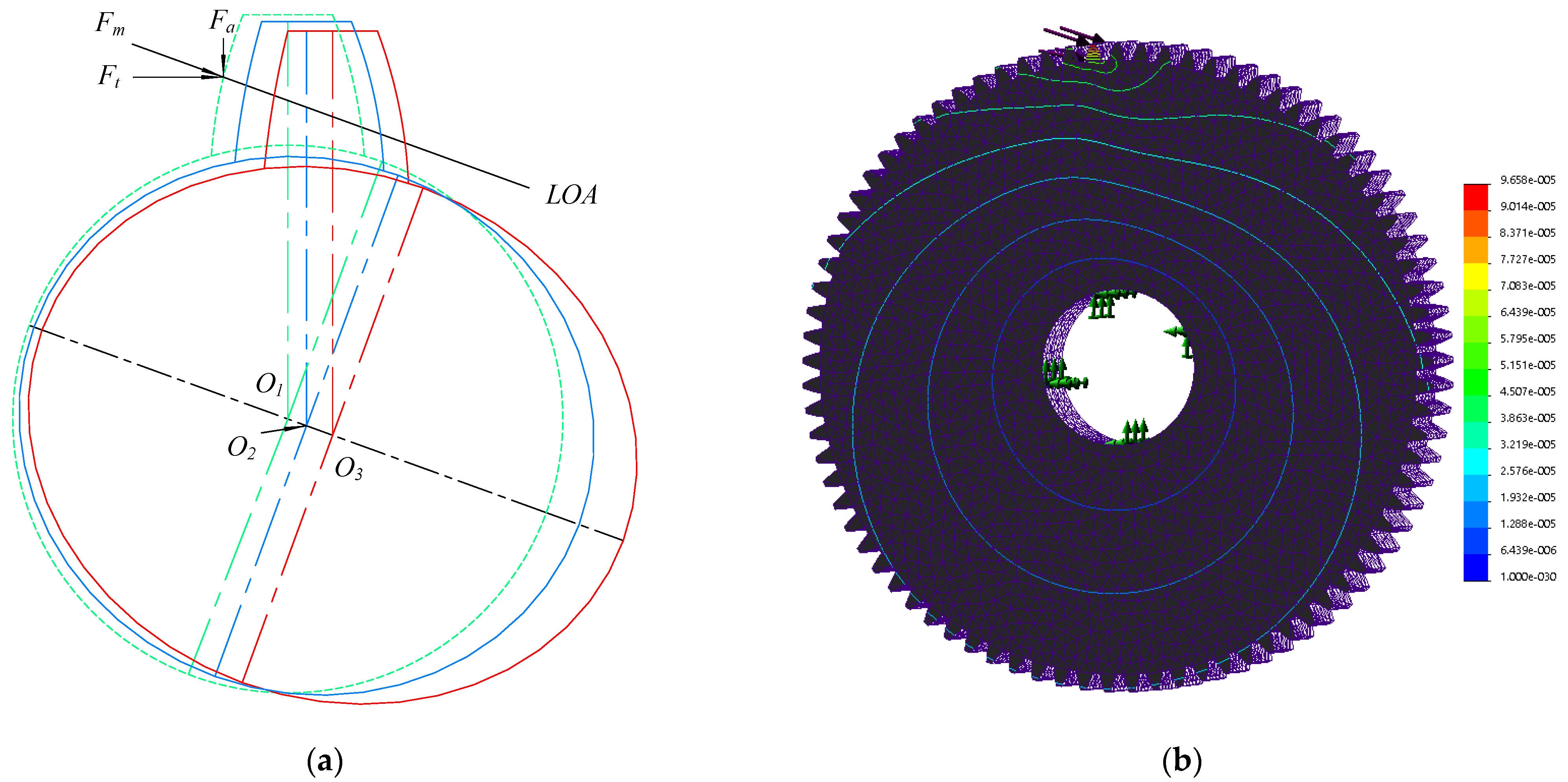
3.1. Deformation of Ring Gears
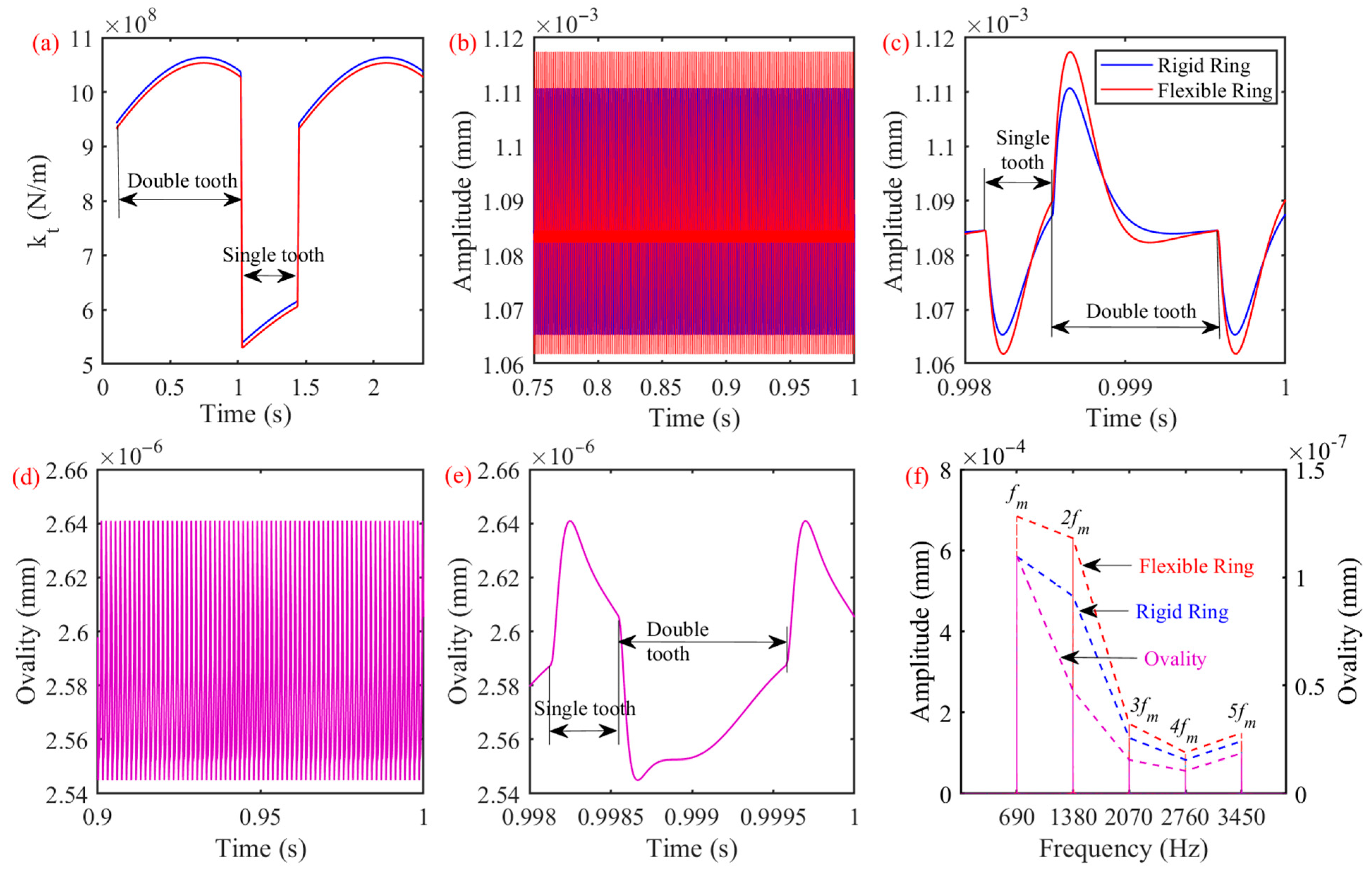
3.2. Dynamic Response of the Gear Pairs
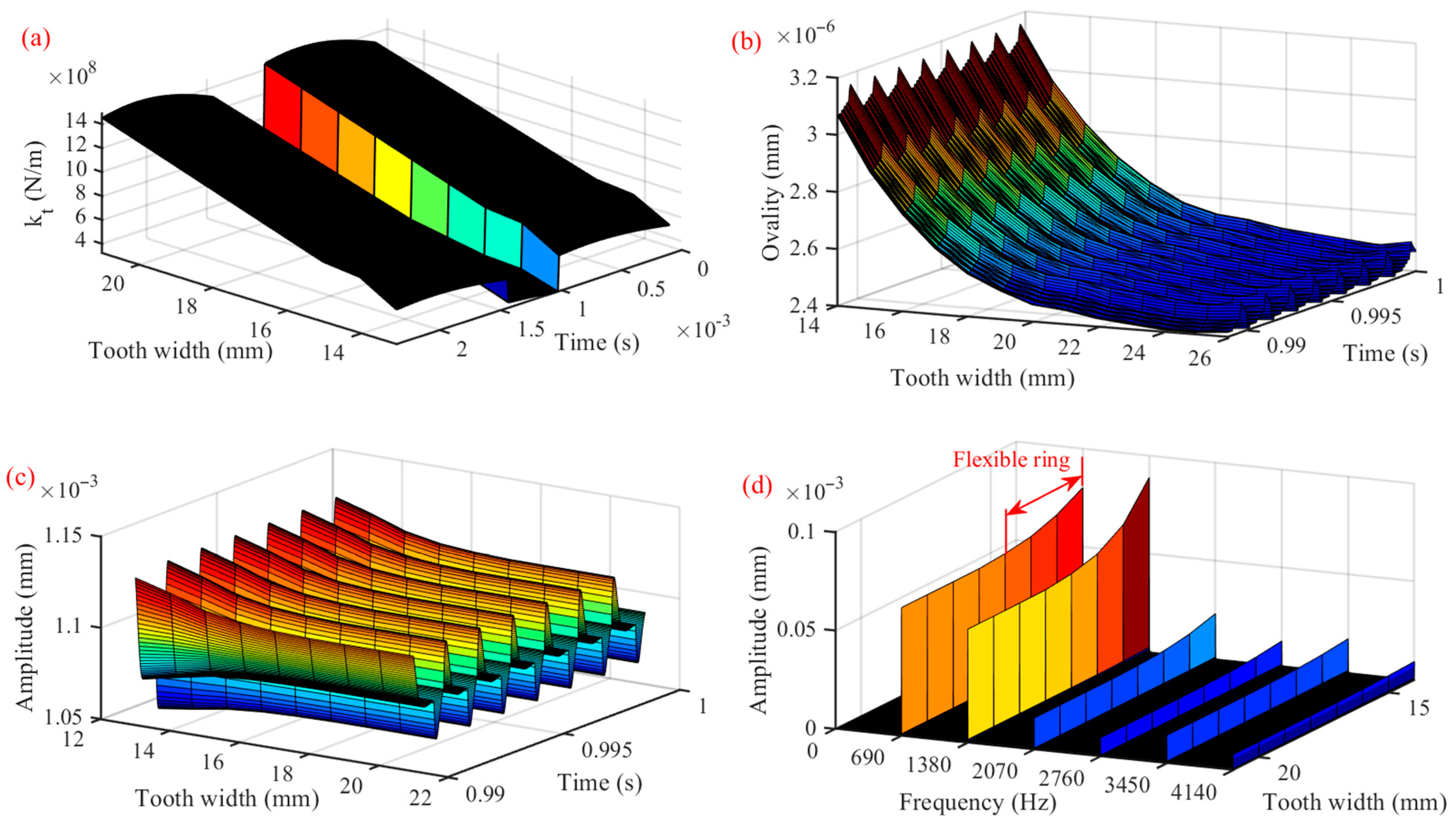
3.3. Dynamic Response of Gear Pairs with Different Flexible Gear Rim Widths
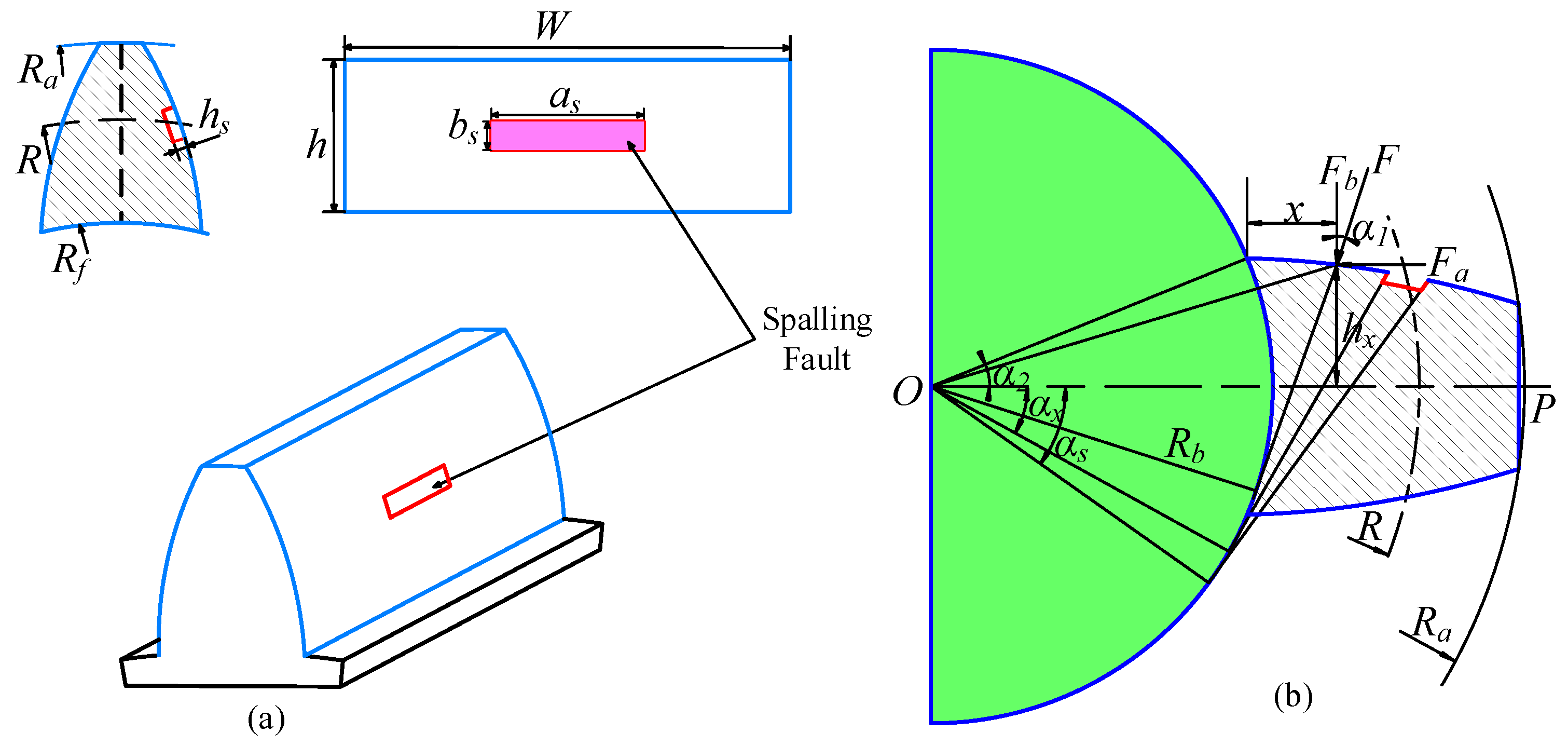
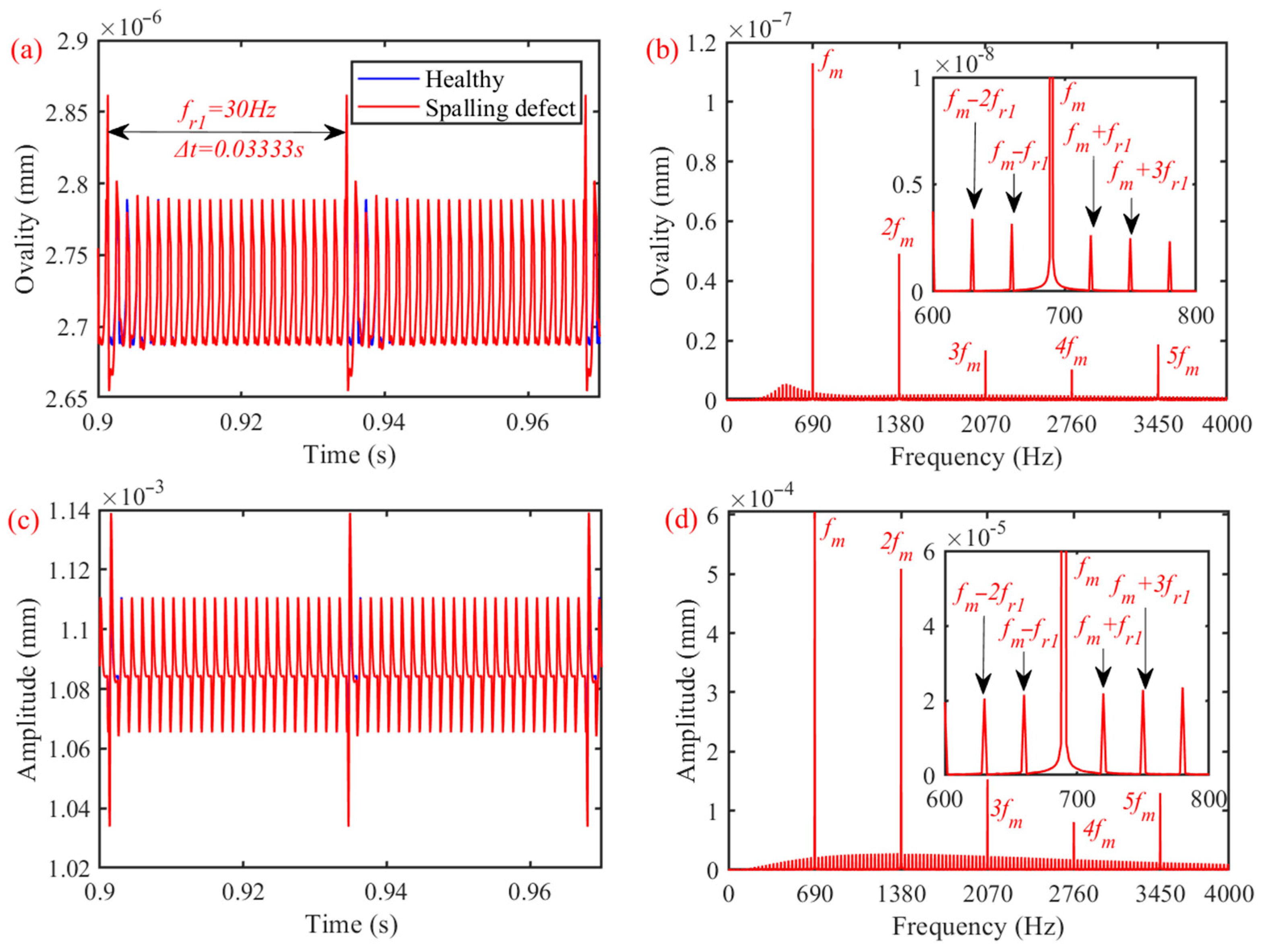
3.4. Response of Gear Pairs with a Localized Spalling Fault
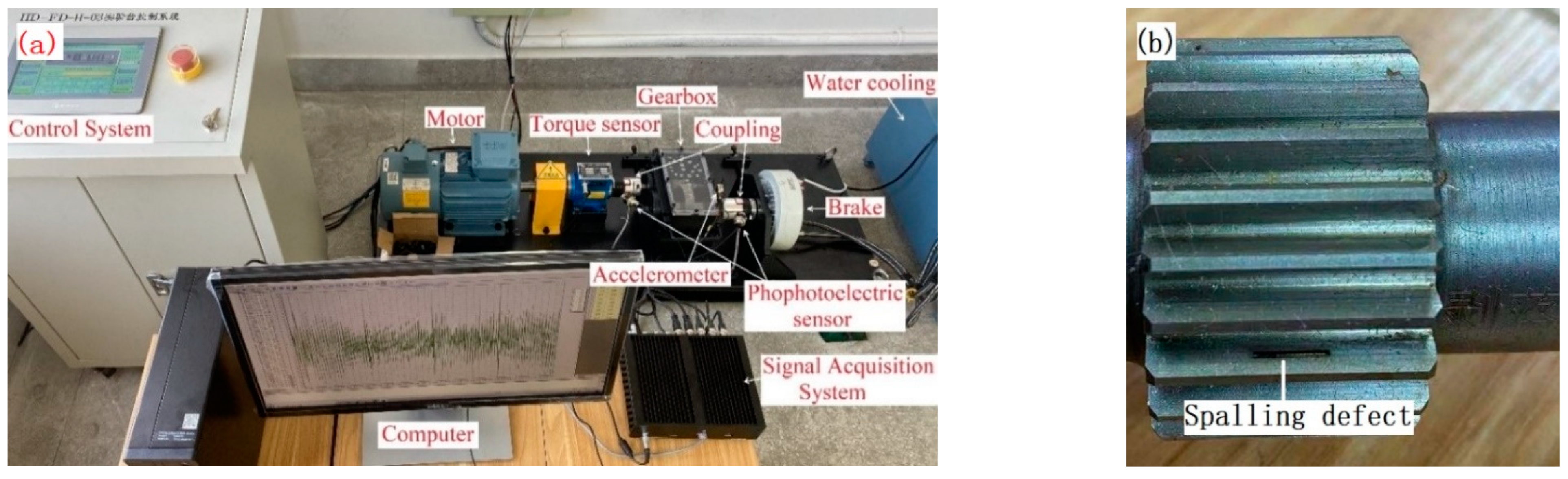
4. Experiment
4.1. Experimental Equipment
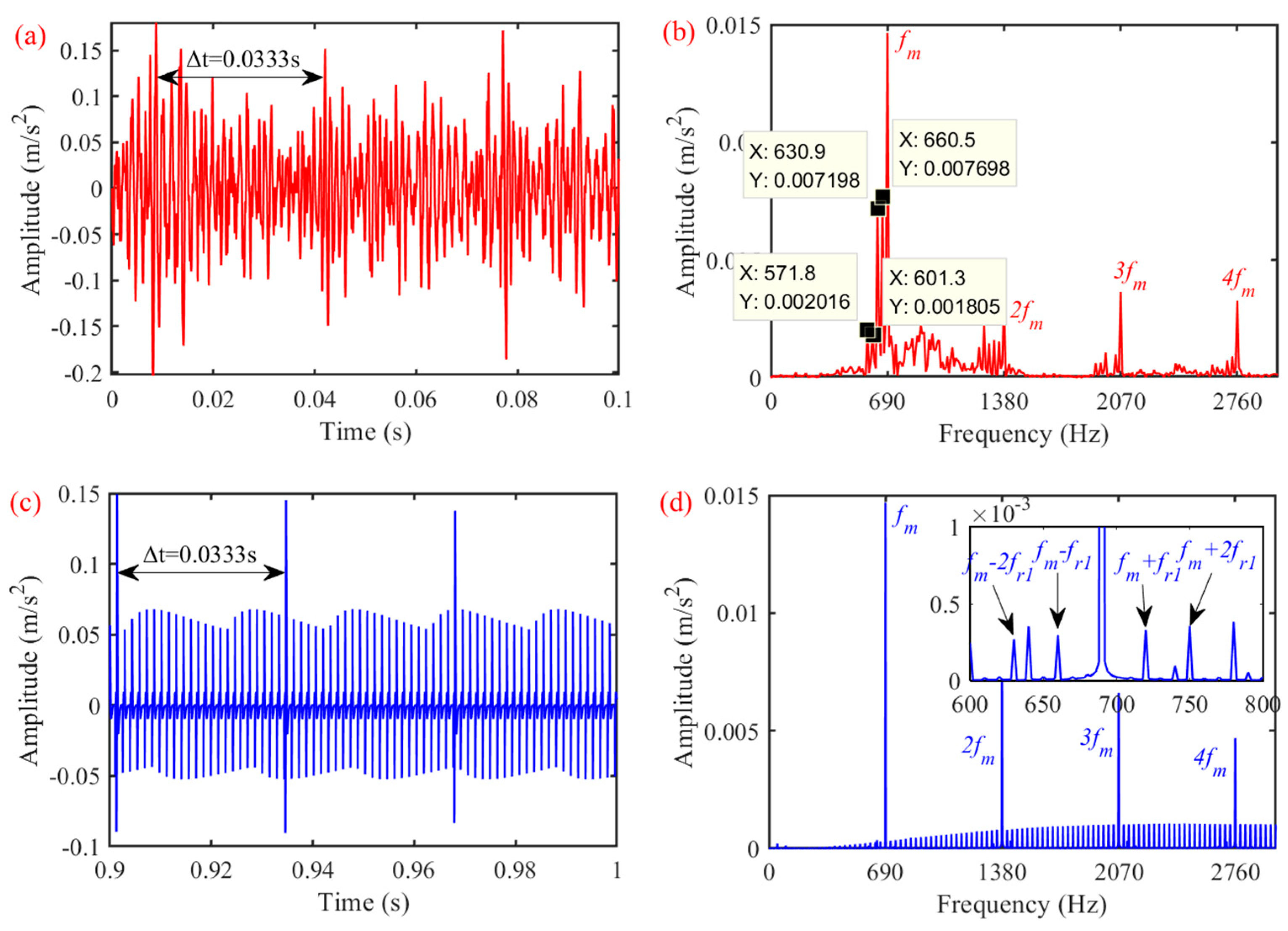
4.2. Experimental Results
5. Conclusions
- (1)
- The flexible ring gear is deformed due to the meshing force, and the deformed shape is close to an ellipse. In single-tooth meshing intervals, the main form of deformation is being stretched, and in double-tooth meshing intervals, the main form is bending.
- (2)
- After the ovality is used to describe the deformation degree of the ring gear, it is found that in single-tooth meshing interval, the ovality value keeps decreasing. When the gear pair is meshed with two pairs of teeth, the ovality value shows an increasing trend.
- (3)
- The flexible deformation of the ring gear can be effectively suppressed by increasing the rim width.
- (4)
- When there are localized spalling faults on gear pairs, the deformation of flexible ring gears is also abruptly changed due to the shock of the meshing force.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, W.; Sun, J.; Yu, J. Analysis of dynamic characteristics of a multi-stage gear transmission system. J. Vib. Control 2019, 25, 1653–1662. [Google Scholar] [CrossRef]
- Palermo, A.; Mundo, D.; Hadjit, R.; Desmet, W. Multibody element for spur and helical gear meshing based on detailed three-dimensional contact calculations. Mech. Mach. Theory 2013, 62, 13–30. [Google Scholar] [CrossRef]
- Ligata, H.; Kahraman, A.; Singh, A. A Closed-Form Planet Load Sharing Formulation for Planetary Gear Sets Using a Translational Analogy. J. Mech. Des. 2009, 131, 021007. [Google Scholar] [CrossRef]
- Guo, Y.; Parker, R.G. Analytical determination of back-side contact gear mesh stiffness. Mech. Mach. Theory 2014, 78, 263–271. [Google Scholar] [CrossRef]
- Zhang, B.; Liu, H.; Zhu, C.; Li, Z. Numerical simulation of competing mechanism between pitting and micro-pitting of a wind turbine gear considering surface roughness. Eng. Fail. Anal. 2019, 104, 1–12. [Google Scholar] [CrossRef]
- Huang, K.J.; Su, H.W. Approaches to parametric element constructions and dynamic analyses of spur/helical gears including modifications and undercutting. Finite Elem. Anal. Des. 2010, 46, 1106–1113. [Google Scholar] [CrossRef]
- Barbieri, M.; Zippo, A.; Pellicano, F. Adaptive grid-size finite element modeling of helical gear pairs. Mech. Mach. Theory 2014, 82, 17–32. [Google Scholar] [CrossRef]
- Liu, J.; Yuan, L. Vibration analysis of a flexible gearbox system considering a local fault in the outer ring of the supported ball bearing. J. Vib. Control 2001, 27, 1063–1076. [Google Scholar] [CrossRef]
- Omar, F.K.; Moustafa, K.A.; Emam, S. Mathematical modeling of gearbox including defects with experimental verification. J. Vib. Control 2021, 18, 1310–1321. [Google Scholar] [CrossRef]
- Jiang, H.; Shao, Y.; Mechefske, C.K. Dynamic characteristics of helical gears under sliding friction with spalling defect. Eng. Fail. Anal. 2014, 39, 92–107. [Google Scholar] [CrossRef]
- Ma, H.; Pang, X.; Zeng, J.; Wang, Q.; Wen, B. Effects of gear crack propagation paths on vibration responses of the perforated gear system. Mech. Syst. Signal Process. 2015, 62–63, 113–128. [Google Scholar] [CrossRef]
- Lewicki, D.G.; Ballarini, R. Effect of Rim Thickness on Gear Crack Propagation Path. J. Mech. Des. 1997, 119, 88–95. [Google Scholar] [CrossRef] [Green Version]
- Jia, S.; Howard, I. Comparison of localised spalling and crack damage from dynamic modeling of spur gear vibrations. Mech. Syst. Signal Process. 2006, 20, 332–349. [Google Scholar] [CrossRef]
- Howard, I.; Jia, S.; Wang, J. The dynamic modelling of a spur gear in mesh including friction and a crack. Mech. Syst. Signal Process. 2001, 15, 831–853. [Google Scholar] [CrossRef]
- Ma, R.; Chen, Y. Research on the dynamic mechanism of the gear system with local crack and spalling failure. Eng. Fail. Anal. 2012, 26, 12–20. [Google Scholar] [CrossRef]
- Chen, Z.; Shao, Y. Dynamic simulation of spur gear with tooth root crack propagating along tooth width and crack depth. Mech. Mach. Theory 2011, 18, 2149–2164. [Google Scholar] [CrossRef]
- Liang, X.; Zhang, H.; Liu, L.; Zuo, M.J. The influence of tooth pitting on the mesh stiffness of a pair of external spur gears. Mech. Mach. Theory 2016, 106, 1–15. [Google Scholar] [CrossRef]
- Chen, Z.; Shao, Y. Mesh stiffness calculation of a spur gear pair with tooth profile modification and tooth root crack. Mech. Mach. Theory 2013, 62, 63–74. [Google Scholar] [CrossRef]
- Chen, Z.; Shao, Y. Dynamic features of planetary gear train with tooth errors. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2015, 229, 1769–1781. [Google Scholar] [CrossRef]
- Ma, H.; Zeng, J.; Feng, R.; Pang, X.; Wen, B. An improved analytical method for mesh stiffness calculation of spur gears with tip relief. Mech. Mach. Theory 2016, 98, 64–80. [Google Scholar] [CrossRef]
- Wu, S.; Cheng, H.S. Sliding Wear Calculation in Spur Gears. J. Tribol. 1993, 115, 493–500. [Google Scholar] [CrossRef]
- Sainsot, P.; Velex, P.; Duverger, O. Contribution of Gear Body to Tooth Deflections-A New Bidimensional Analytical Formula. J. Mech. Des. 2004, 126, 748–752. [Google Scholar] [CrossRef]
- Kahraman, A.; Vijayakar, S. Effect of Internal Gear Flexibility on the Quasi-Static Behavior of a Planetary Gear Set. J. Mech. Des. 2001, 123, 409–415. [Google Scholar] [CrossRef]
- Abousleiman, V.; Velex, P. A hybrid 3D finite element/lumped parameter model for quasi-static and dynamic analyses of planetary/epicyclic gear sets. Mech. Mach. Theory 2006, 41, 725–748. [Google Scholar] [CrossRef]
- Parker, R.G.; Wu, X. Vibration modes of planetary gears with unequally spaced planets and an elastic ring gear. J. Sound Vib. 2010, 329, 2265–2275. [Google Scholar] [CrossRef]
- Wu, X.; Parker, R.G. Vibration of rings on a general elastic foundation. J. Sound Vib. 2006, 295, 194–213. [Google Scholar] [CrossRef]
- Chen, Z.; Shao, Y. Mesh stiffness of an internal spur gear pair with ring gear rim deformation. Mech. Mach. Theory 2013, 69, 1–12. [Google Scholar] [CrossRef]
- Gasmi, A.; Joseph, P.F.; Rhyne, T.B.; Cron, S.M. Closed-form solution of a shear deformable, extensional ring in contact between two rigid surfaces. Int. J. Solids Struct. 2011, 48, 843–853. [Google Scholar] [CrossRef] [Green Version]
- Ruiz Barrios, M.L.; Hernández Montero, F.E.; Gómez Mancilla, J.C.; Palomino Marín, E. Tacho-less automatic rotational speed estimation (TARSE) for a mechanical system with gear pair under non-stationary conditions. Measurement 2019, 145, 480–494. [Google Scholar] [CrossRef]
- Li, Z.; Zhu, C.; Liu, H.; Gu, Z. Mesh stiffness and nonlinear dynamic response of a spur gear pair considering tribo-dynamic effect. Mech. Mach. Theory 2020, 153, 103989. [Google Scholar] [CrossRef]
- Saxena, A.; Parey, A.; Chouksey, M. Effect of shaft misalignment and friction force on time varying mesh stiffness of spur gear pair. Eng. Fail. Anal. 2015, 49, 79–91. [Google Scholar] [CrossRef]
- Yang, D.C.H.; Lin, J.Y. Hertzian Damping, Tooth Friction and Bending Elasticity in Gear Impact Dynamics. J. Mech. Des. 1987, 109, 189–196. [Google Scholar] [CrossRef]
- Chaari, F.; Baccar, W.; Abbes, M.S.; Haddar, M. Effect of spalling or tooth breakage on gearmesh stiffness and dynamic response of a one-stage spur gear transmission. Eur. J. Mech.-A/Solids 2008, 27, 691–705. [Google Scholar] [CrossRef]
- Park, S.; Kim, S.; Choi, J.-H. Gear fault diagnosis using transmission error and ensemble empirical mode decomposition. Mech. Syst. Signal Process. 2018, 108, 262–275. [Google Scholar] [CrossRef]
- Jun, Z.; Wei-min, T.; Qin, C.; Tao, C. Reliability sensitivity analysis of tooth modification on dynamic transmission error of helical planetary gears. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020, 234, 3903–3918. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Driving Gear | Driven Gear |
|---|---|---|
| Gear modulus m/mm | 2 | 2 |
| Teeth number z | 23 | 81 |
| Pressure Angle α/(°) | 20 | 20 |
| Gear width W/mm | 25 | 25 |
| Elastic modulus E/GPa | 208 | 208 |
| Poisson ratio v | 0.31 | 0.31 |
| Parameter | Values |
|---|---|
| 0.96 | |
| 2.88 | |
| 4.365 × 10−4 | |
| 8.362 × 10−4 | |
| 0.0021 | |
| 0.0105 | |
| 3 × 10−5 | |
| 2 × 10−5 | |
| 30 | |
| 690 | |
| 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, S.; Dai, P.; Shu, D.; Wang, J.; Wei, S.; Liu, P.; Zhang, D.; Li, H. Deformation and Response Analysis of Spur Gear Pairs with Flexible Ring Gears and Localized Spalling Faults. Machines 2022, 10, 560. https://doi.org/10.3390/machines10070560
Yan S, Dai P, Shu D, Wang J, Wei S, Liu P, Zhang D, Li H. Deformation and Response Analysis of Spur Gear Pairs with Flexible Ring Gears and Localized Spalling Faults. Machines. 2022; 10(7):560. https://doi.org/10.3390/machines10070560
Chicago/Turabian StyleYan, Shuping, Peng Dai, Da Shu, Jianbin Wang, Shan Wei, Pengfei Liu, Dabin Zhang, and Hongwei Li. 2022. "Deformation and Response Analysis of Spur Gear Pairs with Flexible Ring Gears and Localized Spalling Faults" Machines 10, no. 7: 560. https://doi.org/10.3390/machines10070560