
Insights into the Multilevel Structural Characterization and Adsorption Mechanism of Sinogastromyzon szechuanensis Sucker on the Rough Surface


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Experimental Specimens
2.2. Structural Characterization
2.2.1. Stereo Microscopy
2.2.2. Scanning Electron Microscopy
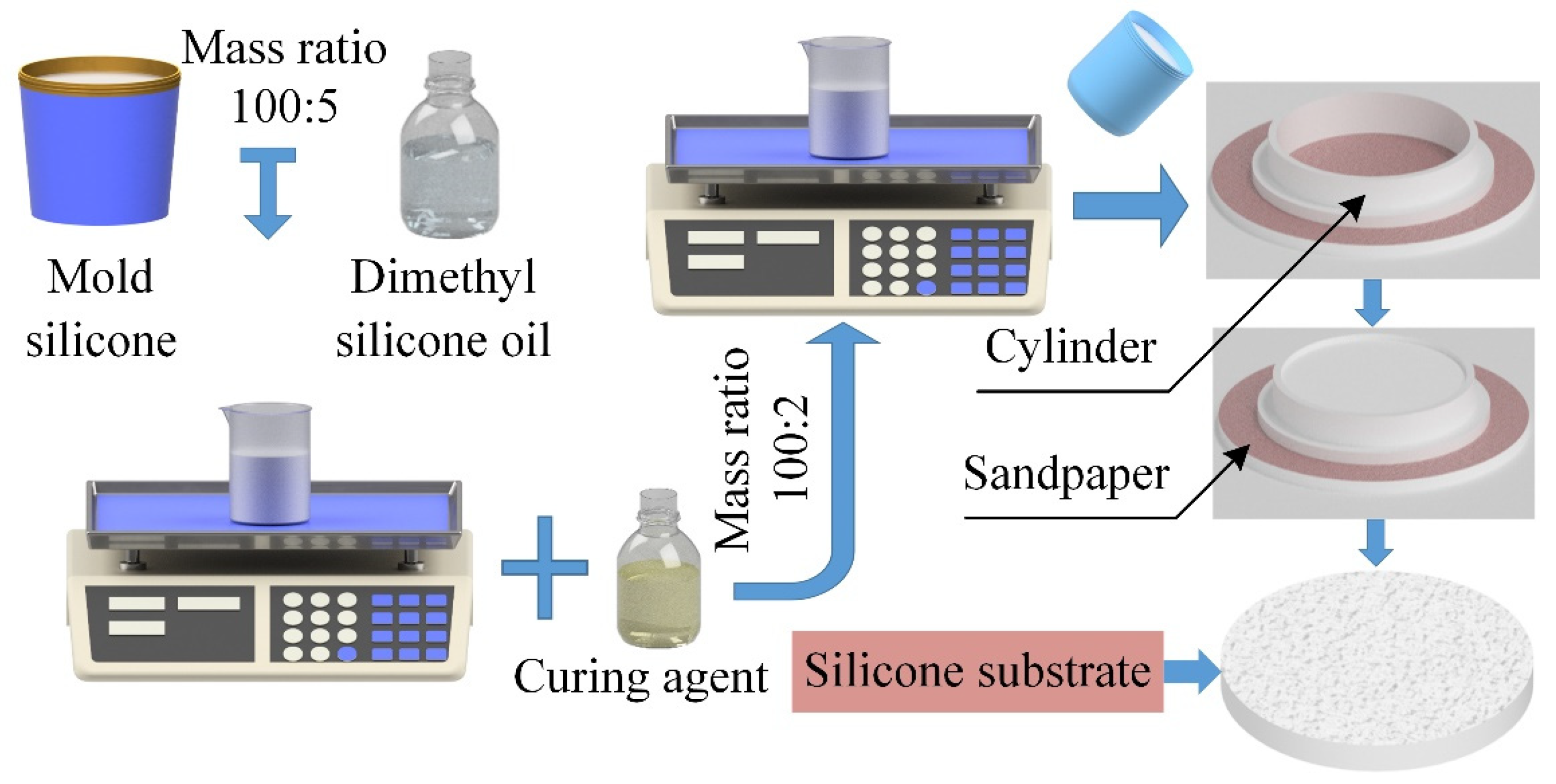
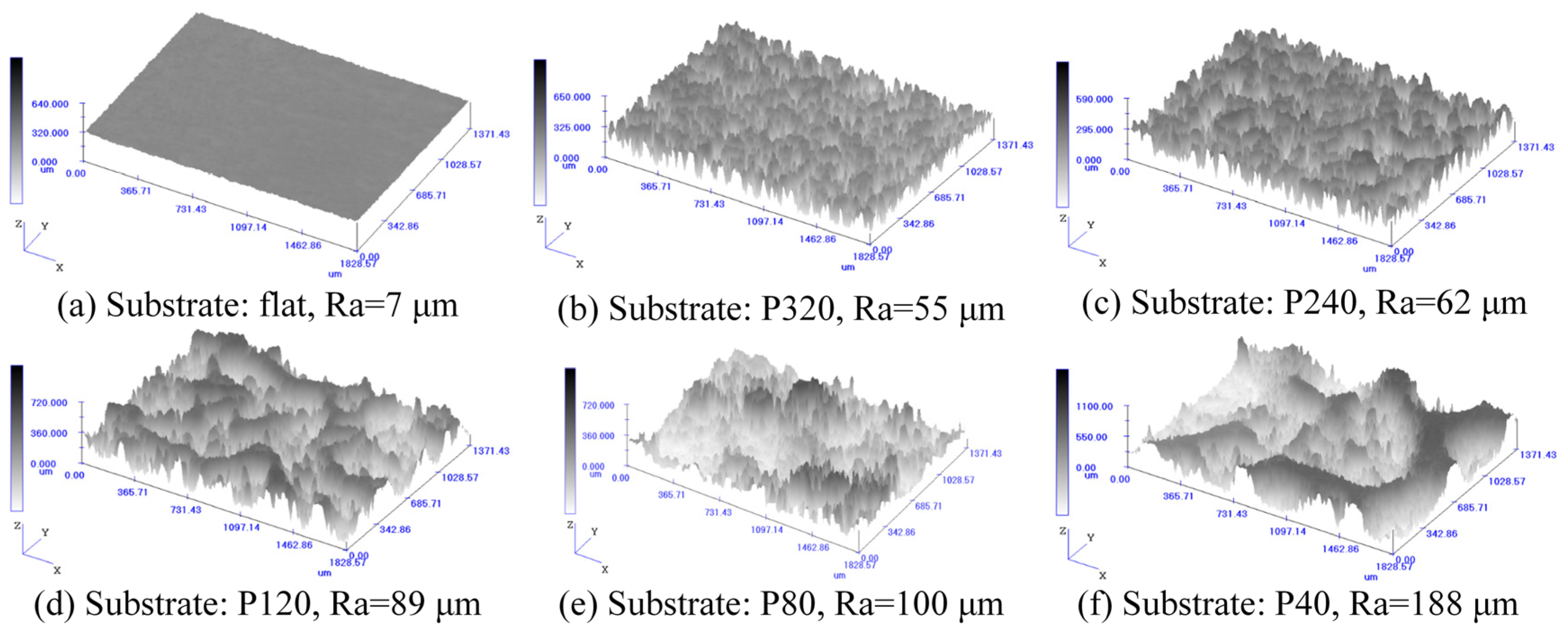
2.3. Fabrication and Surface Characterization of Substrates
2.4. Adsorption Capability Measurement
3. Results
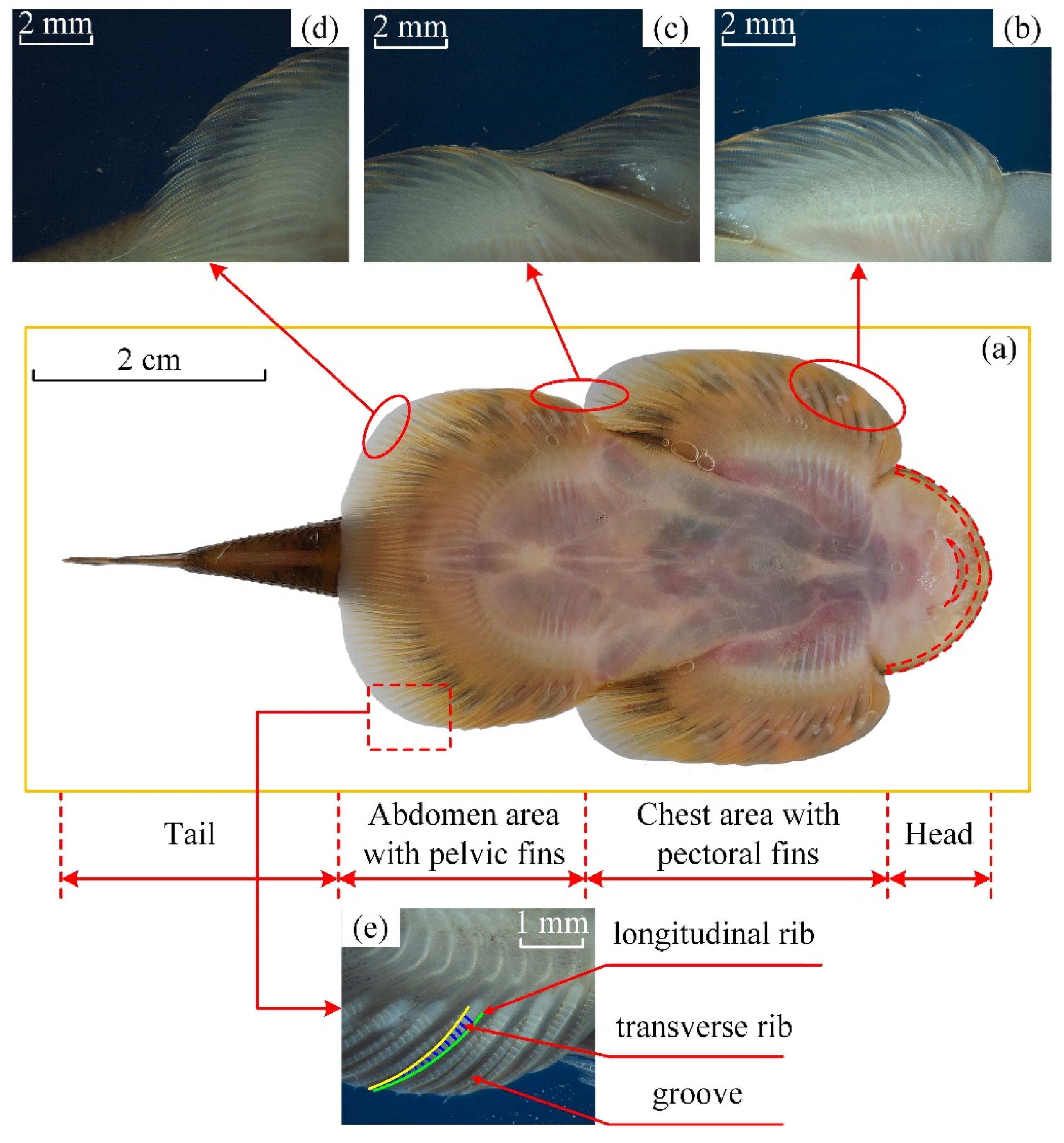
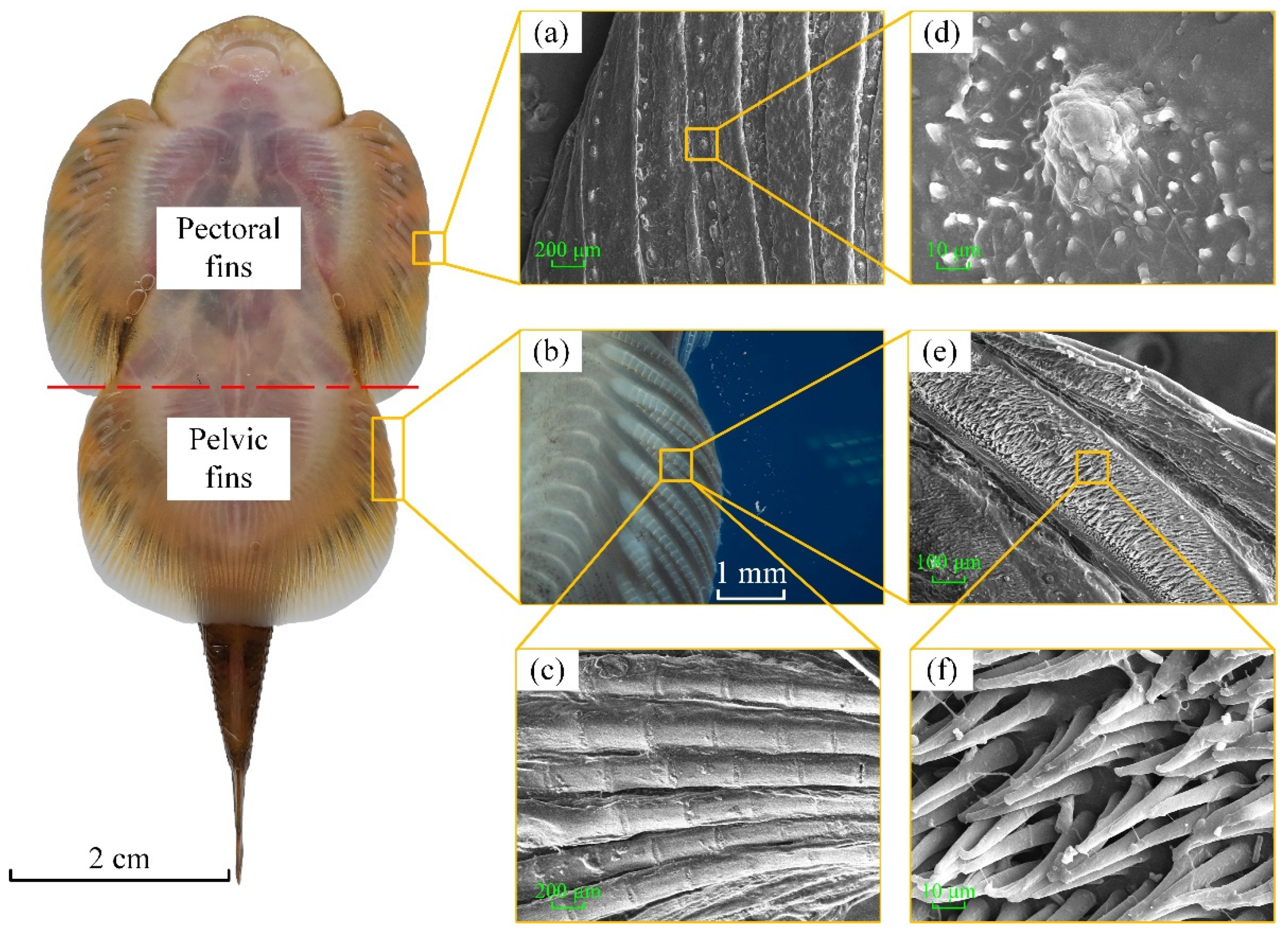
3.1. Macrostructural Characterization
3.2. Microstructural Characterization
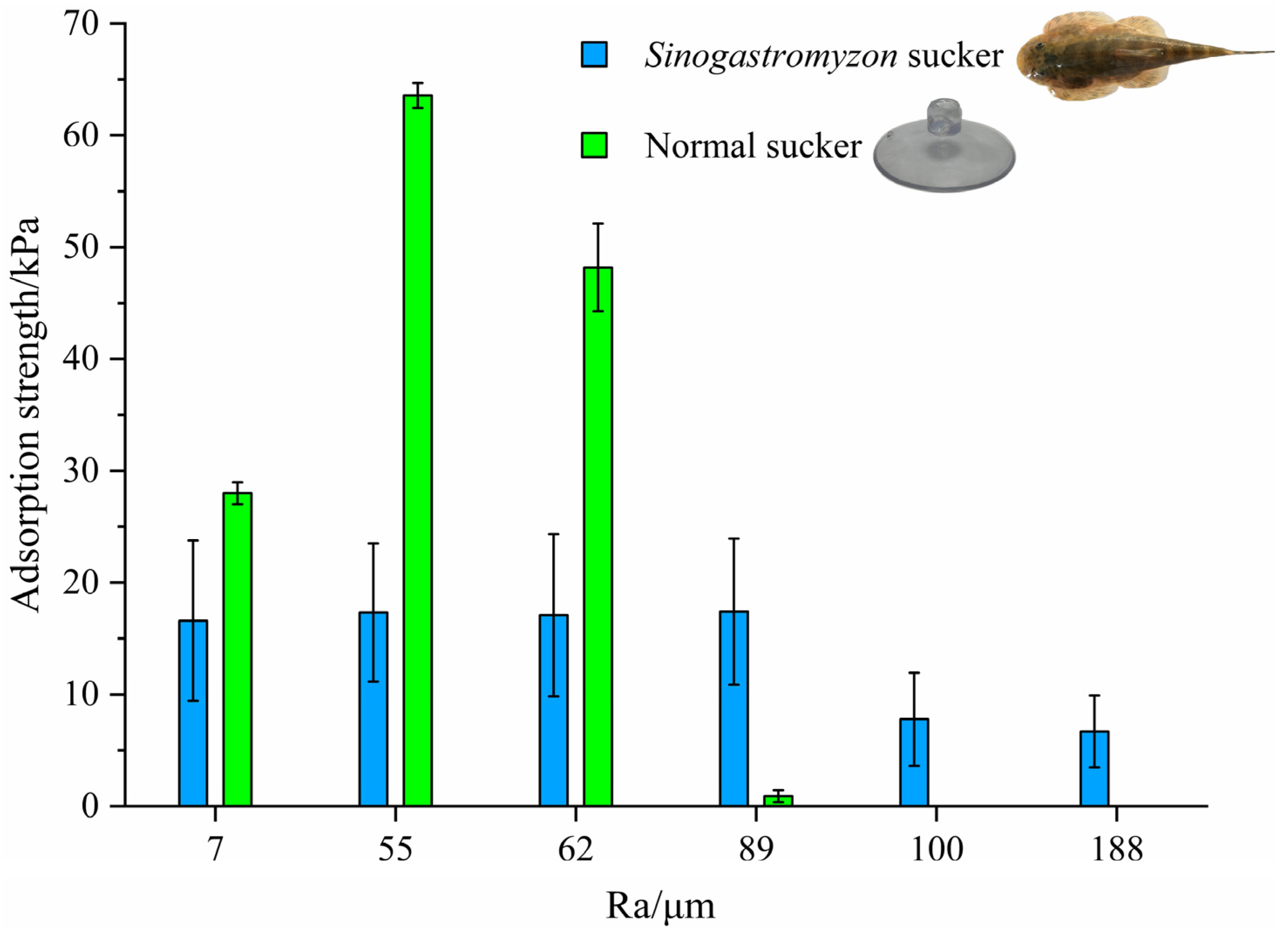
3.3. Adsorption Strength
3.3.1. Mechanical Properties of the Sinogastromyzon Szechuanensis
3.3.2. Experiment on the Influence of the Fin on Adsorption Strength
4. Discussion
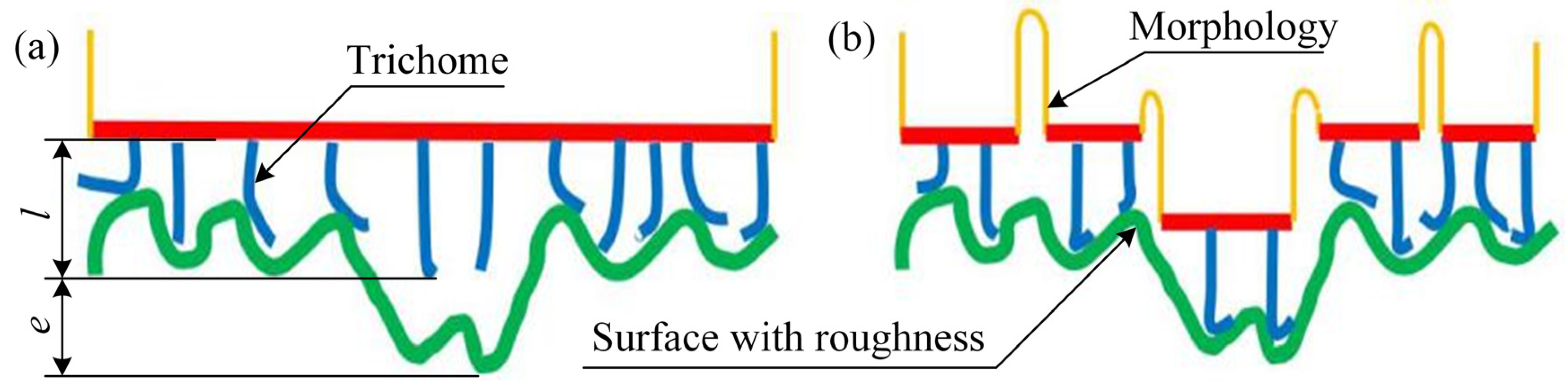
4.1. Qualitative Discussion
4.2. Quantitative Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chu, B.; Jung, K.; Han, C.S.; Hong, D. A survey of climbing robots: Locomotion and adhesion. Int. J. Precis. Eng. Manuf. 2010, 11, 633–647. [Google Scholar] [CrossRef]
- Moon, S.M.; Shin, C.Y.; Huh, J.; Oh, K.W.; Hong, D. Window cleaning system with water circulation for building facade maintenance robot and its efficiency analysis. Int. J. Precis. Eng. Manuf. Green. Technol. 2015, 2, 65–72. [Google Scholar] [CrossRef] [Green Version]
- Mehanovic, D.; Rancourt, D.; Desbiens, A.L. Fast and efficient aerial climbing of vertical surfaces using fixed-wing. IEEE Robot. Autom. Lett. 2019, 4, 97–104. [Google Scholar] [CrossRef]
- Myeong, W.; Myung, H. Development of a wall-climbing drone capable of vertical soft landing using a tilt-rotor mechanism. IEEE Access 2019, 7, 4868–4879. [Google Scholar] [CrossRef]
- Gillies, A.G.; Henry, A.; Lin, H.W.; Ren, A.; Shiuan, K.; Fearing, R.S.; Full, R.J. Gecko toe and lamellar shear adhesion on macroscopic, engineered rough surfaces. J. Exp. Biol. 2014, 217, 283–289. [Google Scholar] [CrossRef] [Green Version]
- Persson, B.N.J.; Scaraggi, M. Theory of adhesion: Role of surface roughness. J. Chem. Phys. 2014, 141, n124701. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- LaMarche, C.Q.; Leadley, S.; Liu, P.Y.; Kellogg, K.M.; Hrenya, C.M. Method of quantifying surface roughness for accurate adhesive force predictions. Chem. Eng. Sci. 2017, 158, 140–153. [Google Scholar] [CrossRef]
- Pope, M.T.; Kimes, C.W.; Jiang, H.; Hawkes, E.W.; Estrada, M.A.; Kerst, C.F.; Roderick, W.R.T.; Han, A.K.; Christensen, D.L. A multimodal robot for perching and climbing on vertical outdoor surfaces. IEEE Trans. Robot. 2017, 33, 38–40. [Google Scholar] [CrossRef]
- Stark, A.Y.; Dryden, D.M.; Olderman, J.; Peterson, K.A.; Niewiarowski, P.H.; French, R.H.; Dhinojwala, A. Adhesive interactions of geckos with wet and dry fluoropolymer substrates. J. R. Soc. Interface 2015, 12, n20150464. [Google Scholar] [CrossRef]
- Hill, I.D.C.; Dong, B.Z.; Barnes, W.J.P.; Ji, A.H.; Endlein, T. The biomechanics of tree frogs climbing curved surfaces: A gripping problem. J. Exp. Biol. 2018, 221, n168179. [Google Scholar] [CrossRef] [Green Version]
- Kampowski, T.; Eberhard, L.; Gallenmüller, F.; Speck, T.; Poppinga, S. Functional morphology of suction discs and attachment performance of the mediterranean medicinal leech (Hirudo verbana Carena). J. R. Soc. Interface 2016, 13, n20160096. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, J.; Zhang, Y.; Liu, S.; Liu, J.L. Insights into adhesion of abalone: A mechanical approach. J. Mech. Behav. Biomed. Mater. 2018, 77, 331–336. [Google Scholar] [CrossRef] [PubMed]
- Tramacere, F.; Kovalev, A.; Kleinteich, T.; Gorb, S.N.; Mazzolai, B. Structure and mechanical properties of Octopus vulgaris suckers. J. R. Soc. Interface 2014, 11, n20130816. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Autumn, K.; Liang, Y.A.; Hsieh, S.T.; Zesch, W.; Chan, W.P.; Kenny, T.W.; Fearing, R.; Full, R.J. Adhesive force of a single gecko foot-hair. Nature 2000, 405, 681–685. [Google Scholar] [CrossRef]
- Autumn, K.; Sitti, M.; Liang, Y.C.A.; Peattie, A.M.; Hansen, W.R.; Sponberg, S.; Kenny, T.W.; Fearing, R.; Israelachvili, J.N.; Full, R.J. Evidence for van der Waals adhesion in gecko setae. Proc. Natl. Acad. Sci. USA 2002, 99, 12252–12256. [Google Scholar] [CrossRef] [Green Version]
- Persson, J.B.N. Wet adhesion with application to tree frog adhesive toe pads and tires. J. Phys. Condes. Matter 2007, 19, n376110. [Google Scholar] [CrossRef]
- Hancock, M.I.; Sekeroglu, K.; Demirel, M.C. Bioinspired directional surfaces for adhesion, wetting, and transport. Adv. Funct. Mater. 2012, 22, 2223–2234. [Google Scholar] [CrossRef] [Green Version]
- Federle, W. Why are so many adhesive pads hairy? J. Exp. Biol. 2006, 202, 2611–2621. [Google Scholar] [CrossRef] [Green Version]
- Purtov, J.; Frensemeier, M.; Kroner, E. Switchable adhesion in vacuum using bio-inspired dry adhesives. ACS. Appl. Mater. Interfaces 2015, 7, 24127–24135. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.S.; Krahn, J.; Menon, C. Bioinspired dry adhesive materials and their application in robotics: A review. J. Bionic. Eng. 2016, 13, 181–199. [Google Scholar] [CrossRef]
- Arzt, E.; Gorb, S.; Spolenak, R. From micro to nano contacts in biological attachment devices. Proc. Natl. Acad. Sci. USA 2003, 100, 10603–10606. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Drotlef, D.M.; Stepien, L.; Kappl, M.; Barnes, W.J.P.; Butt, H.J.; del Campo, A. Insights into the adhesive mechanisms of tree frogs using artificial mimics. Adv. Funct. Mater. 2013, 23, 1137–1146. [Google Scholar] [CrossRef]
- Labonte, D.; Federle, W. Scaling and biomechanics of surface attachment in climbing animals. Philos. Trans. R. Soc. B-Biol. Sci. 2015, 370, n20140027. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Endlein, T.; Federle, W. Rapid preflexes in smooth adhesive pads of insects prevent sudden detachment. Proc. R. Soc. B-Biol. Sci. 2013, 280, n20122868. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xue, L.J.; Sanz, B.; Luo, A.; Turner, K.T.; Wang, X.; Tan, D.; Zhang, R.; Du, H.; Steinhart, M.; Mijangos, C. Hybrid surface patterns mimicking the design of the adhesive toe pad of tree frog. ACS Nano 2017, 11, 9711–9719. [Google Scholar] [CrossRef] [PubMed]
- Persson, B.N.J. Biological adhesion for locomotion: Basic principles. J. Adhes. Sci. Technol. 2007, 21, 1145–1173. [Google Scholar] [CrossRef] [Green Version]
- Ditsche, P.; Summers, A.P. Aquatic versus terrestrial attachment: Water makes a difference. Beilstein. J. Nanotechnol. 2014, 5, 2424–2439. [Google Scholar] [CrossRef]
- Tadmor, R.; Das, R.; Gulec, S.; Liu, J.; N’guessan, H.E.; Shah, M.; Wasnik, P.S.; Yadav, S.B. Solid-liquid work of adhesion. Langmuir 2017, 33, 3594–3600. [Google Scholar] [CrossRef] [PubMed]
- Extrand, C.W. Comment on “Solid-liquid work of adhesion”. Langmuir 2017, 33, 9241–9242. [Google Scholar] [CrossRef] [Green Version]
- Tramacere, F.; Appel, E.; Mazzolai, B.; Gorb, S.N. Hairy suckers: The surface microstructure and its possible functional significance in the octopus vulgaris sucker. Beilstein. J. Nanotechnol. 2014, 5, 561–565. [Google Scholar] [CrossRef] [Green Version]
- Tramacere, F.; Follador, M.; Pugno, N.M.; Mazzolai, B. Octopus-like suction cups: From natural to artificial solutions. Bioinspir. Biomim. 2015, 10, n035004. [Google Scholar] [CrossRef]
- Lin, A.Y.M.; Brunner, R.; Chen, P.Y.; Talke, F.E.; Meyers, M.A. Underwater adhesion of abalone: The role of van der Waals and capillary forces. Acta Mater. 2009, 57, 4178–4185. [Google Scholar] [CrossRef]
- Liu, S.W.; Chen, X.Y.; Yang, J.X. Two new species and a new record of the genus Sinogastromyzon (Teleostei: Balitoridae) from Yunnan, China. Environ. Biol. Fishes. 2010, 87, 25–37. [Google Scholar] [CrossRef]
- Adams, R.D.; Reinhardt, U.G. Effects of texture on surface attachment of spawning-run sea lampreys Petromyzon marinus: A quantitative analysis. J. Fish Biol. 2008, 73, 1464–1472. [Google Scholar] [CrossRef]
- Ditsche, P.; Wainwright, D.K.; Summers, A.P. Attachment to challenging substrates-fouling, roughness and limits of adhesion in the northern clingfish (Gobiesox maeandricus). J. Exp. Biol. 2014, 217, 2548–2554. [Google Scholar] [CrossRef] [Green Version]
- Wainwright, D.K.; Kleinteich, T.; Kleinteich, A.; Grob, S.N.; Summers, A.P. Stick tight: Suction adhesion on irregular surfaces in the northern clingfish. Biol. Lett. 2013, 9, n20130234. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Motta, P.J.; Fulcher, B.A. Suction disk performance of echeneid fishes. Can. J. Zool. 2006, 84, 42–50. [Google Scholar] [CrossRef]
- Ditsche, P.; Hicks, M.; Truong, L.; Linkem, C.; Summers, A. From smooth to rough, from water to air: The intertidal habitat of Northern clingfish (Gobiesox maeandricus). Sci. Nat. 2017, 104, n33. [Google Scholar] [CrossRef]
- Laboratory Animals-General Requirements for Animal Experiment; GB/T 35823-2018; General Administration of Quality Supervision, Inspection and Quarantine; Standardization Administration of the People’s Republic of China: Beijing, China, 2018.
- Standards for Drinking Water Quality; GB 5749-2006; Ministry of Health of China; Standardization Administration of China: Beijing, China, 2006.
- Chuang, Y.C.; Chang, H.K.; Liu, G.L. Climbing upstream: Multi-scale structural characterization and underwater adhesion of the Pulin river loach (Sinogastromyzon puliensis). J. Mech. Behav. Biomed. Mater. 2017, 73, 76–85. [Google Scholar] [CrossRef] [PubMed]
- Han, K.; Park, T.Y.; Yong, K.; Cha, H.J. Combinational biomimicking of lotus leaf, mussel, and sandcastle worm for robust superhydrophobic surfaces with biomedical multifunctionality: Antithrombotic, antibiofouling, and tissue closure capabilities. ACS Appl. Mater. Interfaces 2019, 11, 9777–9785. [Google Scholar] [CrossRef] [PubMed]
- Barthlott, W.; Mail, M.; Neinhuis, C. Superhydrophobic hierarchically structured surfaces in biology: Evolution, structural principles and biomimetic applications. Trans. R. Soc. A-Math. Phys. Eng. 2016, 374, n20160191. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nayak, P.R. Random process model of rough surfaces. J. Lub. Tech. 1971, 93, 398–407. [Google Scholar] [CrossRef]
- Persson, B.N.J.; Albohr, O.; Tartaglino, U.; Volokitin, A.L.; Tosatti, E. On the nature of surface roughness with application to contact mechanics, sealing, rubber friction and adhesion. J. Phys. Condes. Matter. 2005, 17, 1–62. [Google Scholar] [CrossRef] [PubMed] [Green Version]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cong, Q.; Xu, J.; Fan, J.; Chen, T.; Ru, S. Insights into the Multilevel Structural Characterization and Adsorption Mechanism of Sinogastromyzon szechuanensis Sucker on the Rough Surface. Life 2021, 11, 952. https://doi.org/10.3390/life11090952
Cong Q, Xu J, Fan J, Chen T, Ru S. Insights into the Multilevel Structural Characterization and Adsorption Mechanism of Sinogastromyzon szechuanensis Sucker on the Rough Surface. Life. 2021; 11(9):952. https://doi.org/10.3390/life11090952
Chicago/Turabian StyleCong, Qian, Jin Xu, Jiaxiang Fan, Tingkun Chen, and Shaofeng Ru. 2021. "Insights into the Multilevel Structural Characterization and Adsorption Mechanism of Sinogastromyzon szechuanensis Sucker on the Rough Surface" Life 11, no. 9: 952. https://doi.org/10.3390/life11090952