
Surface Waves Prediction Based on Long-Range Acoustic Backscattering in a Mid-Frequency Range

 , , and
, , and
Abstract
:1. Introduction
2. Theory Background
3. Materials
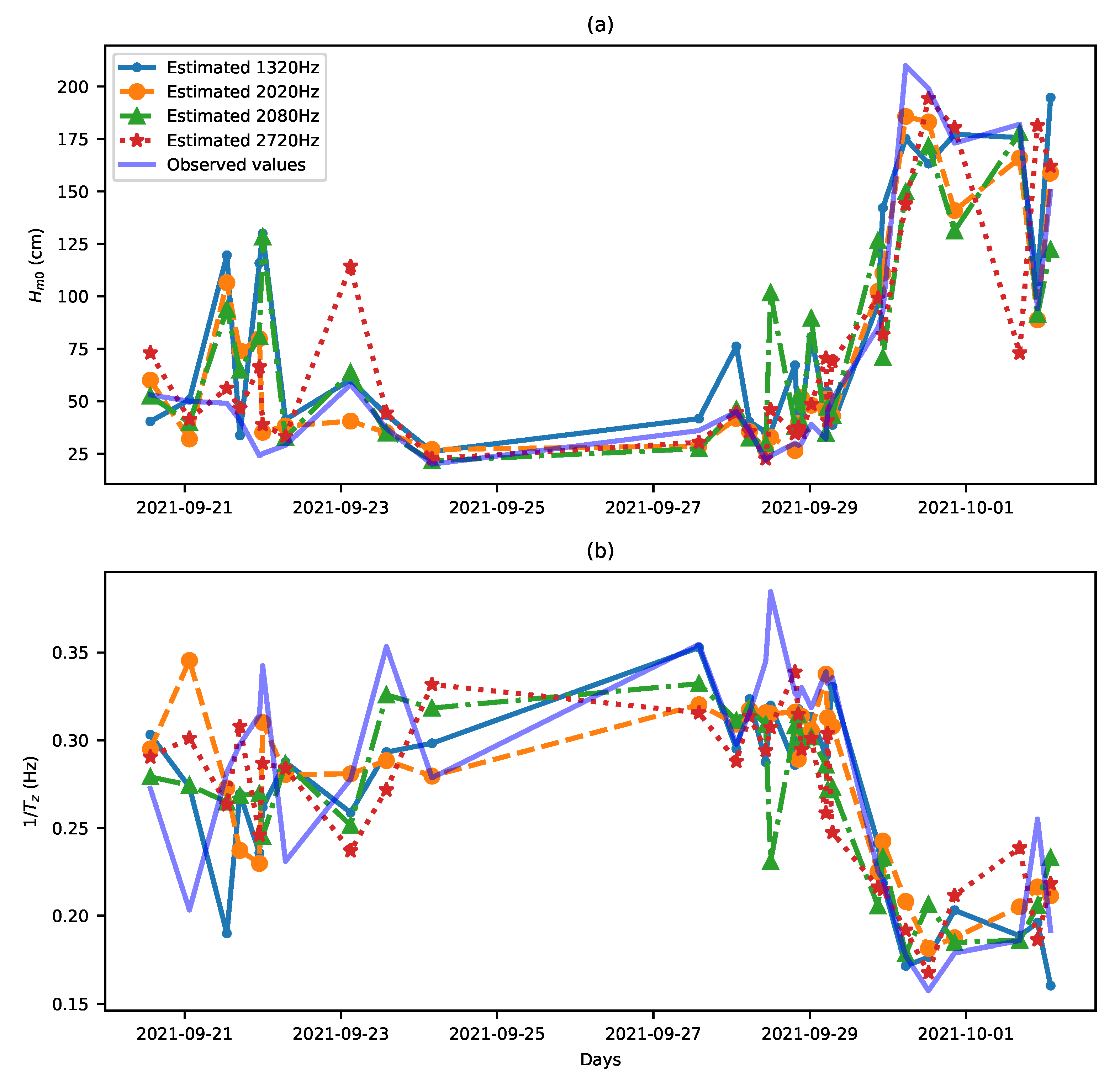
- significant waveheight ;
- direction of the most intensive waves Dirp;
- period of spectral peak .
4. Methods
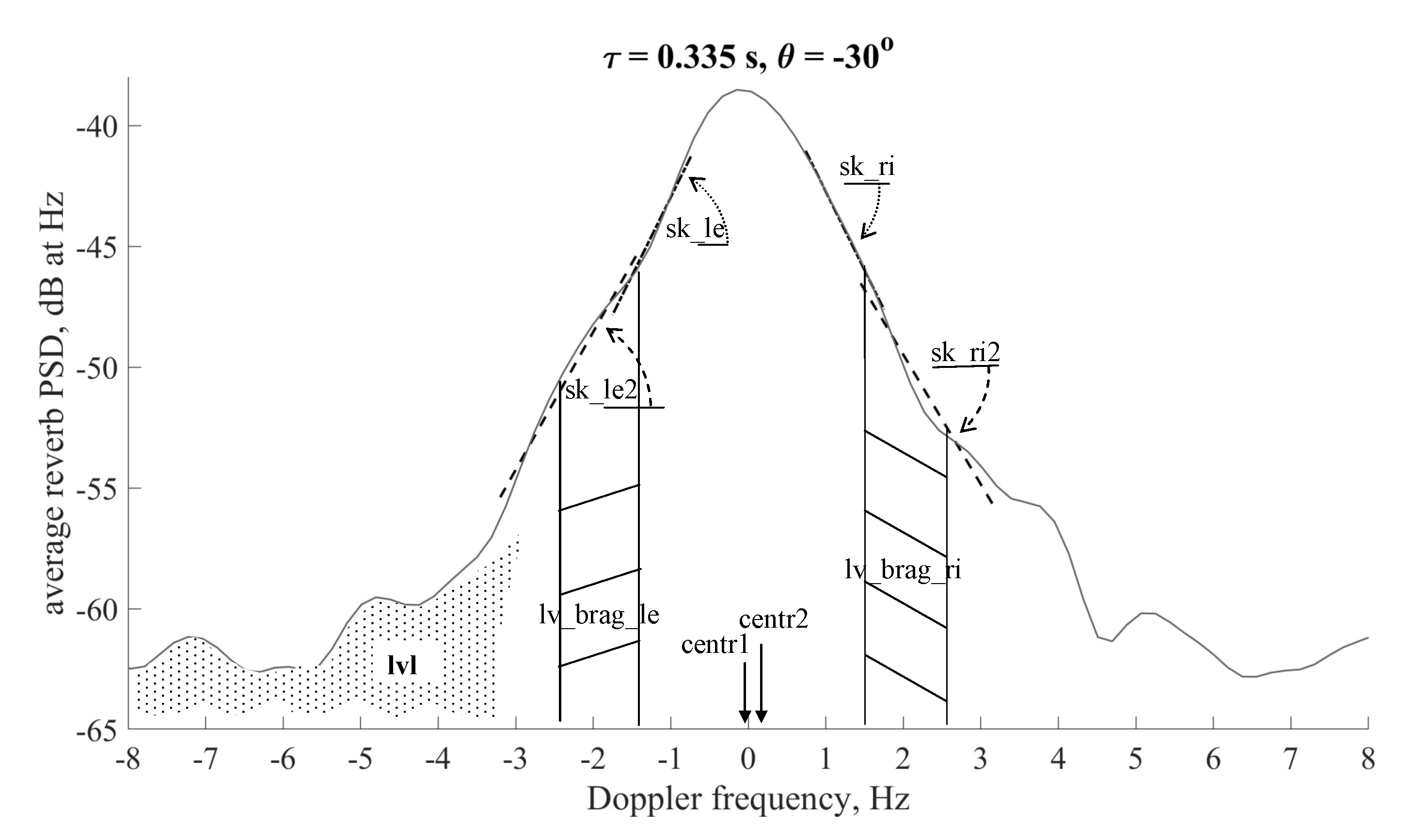
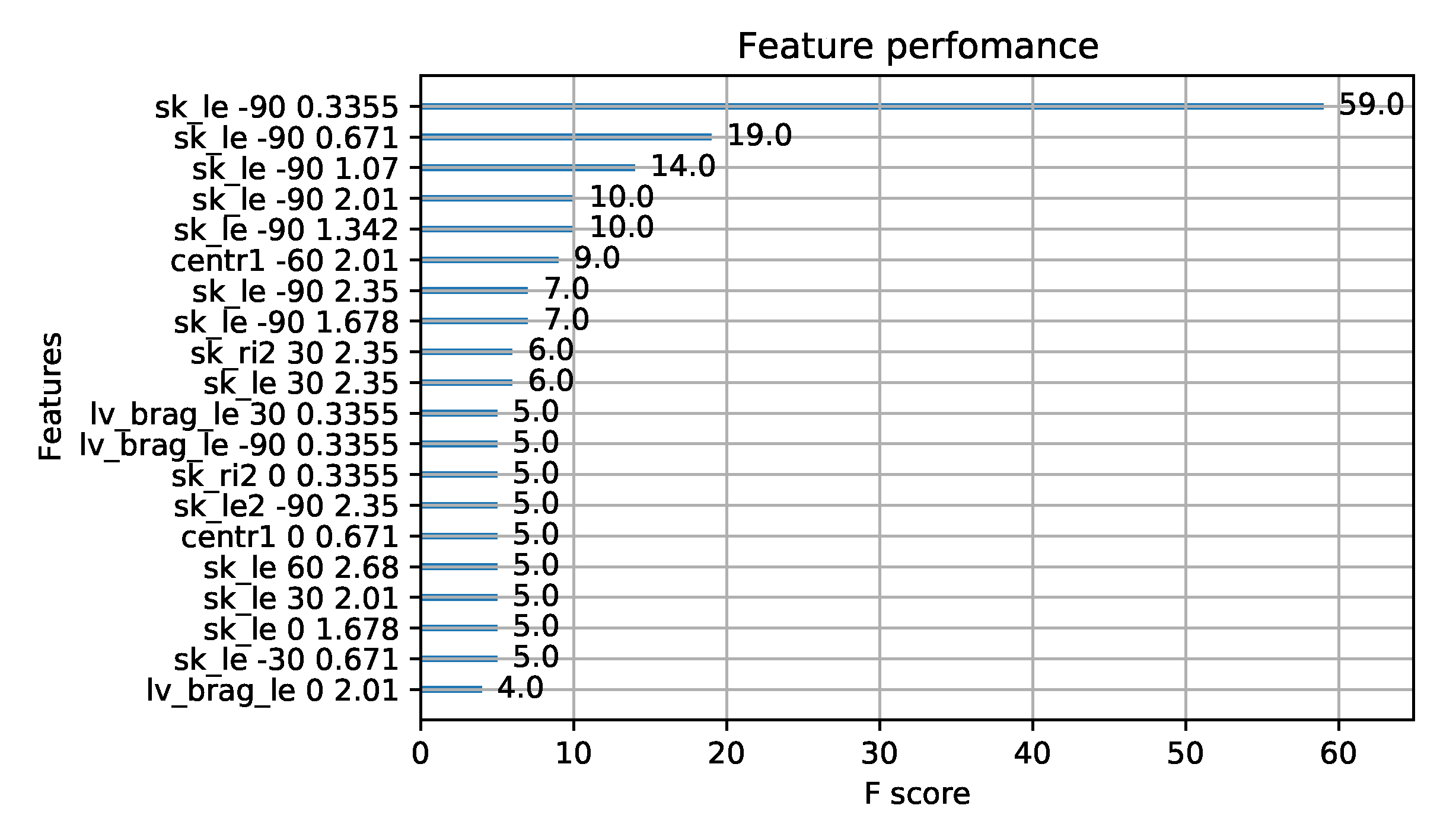
4.1. Signal Preprocessing and Features Extraction
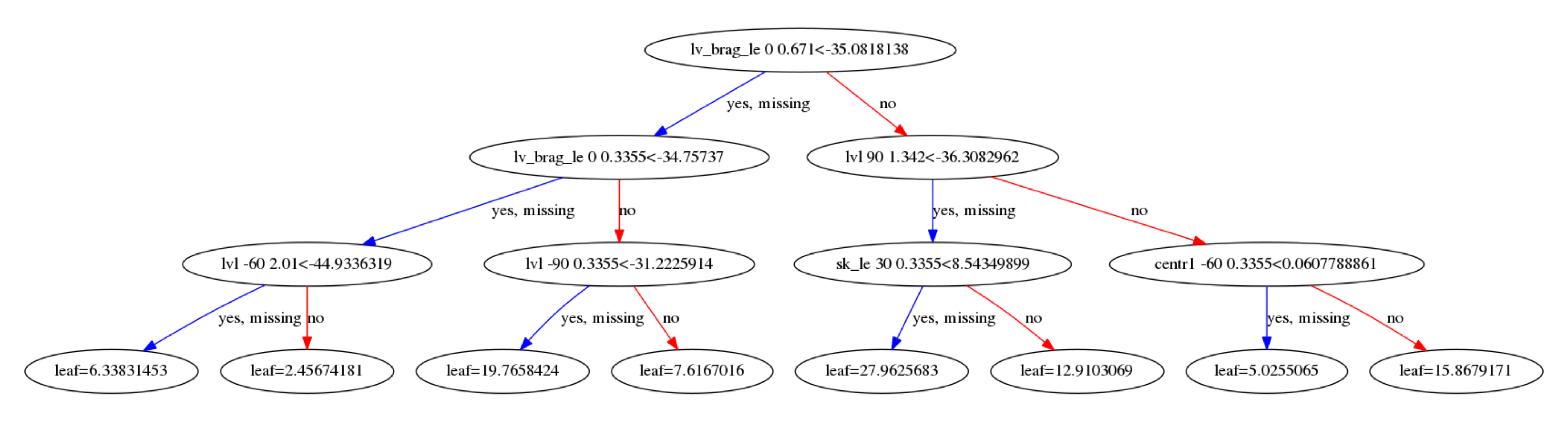
4.2. Regression Model
5. Results
5.1. Correlation Analysis
5.2. Evaluation of Regression Models
5.3. Parameters Tuning
- Number of estimators ;
- Max depth of decision trees ;
- Learning rate ;
- Step size shrinkage .
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kuznetsova, A.; Baydakov, G.; Papko, V.; Kandaurov, A.; Vdovin, M.; Sergeev, D.; Troitskaya, Y. Adjusting of wind input source term in WAVEWATCH III model for the middle-sized water body on the basis of the field experiment. Adv. Meteorol. 2016, 2016, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Wei, Z.; Davison, A. A convolutional neural network based model to predict nearshore waves and hydrodynamics. Coast. Eng. 2022, 171, 104044. [Google Scholar] [CrossRef]
- Young, I.R.; Rosenthal, W.; Ziemer, F. A three-dimensional analysis of marine radar images for the determination of ocean wave directionality and surface currents. J. Geophys. Res. Ocean. 1985, 90, 1049–1059. [Google Scholar] [CrossRef] [Green Version]
- Dankert, H.; Horstmann, J.; Rosenthal, W. Wind-and wave-field measurements using marine X-band radar-image sequences. IEEE J. Ocean. Eng. 2005, 30, 534–542. [Google Scholar] [CrossRef]
- Rosenberg, A.; Ostrovskiy, I.; Zel’dis, V.; Leiykin, I.; Ruskevich, V.G. Determination of the energy-carrying part of the sea wave spectrum by the phase characteristics of the radio signal scattered by the sea. Izv. Akad. Nauk SSSR Fiz. Atmosfery i Okeana 1973, 9, 1323–1326. (In Russian) [Google Scholar]
- Lyzenga, D.; Nwogu, O.; Trizna, D.; Hathaway, K. Ocean wave field measurements using X-band Doppler radars at low grazing angles. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 4725–4728. [Google Scholar] [CrossRef]
- Carrasco, R.; Horstmann, J.; Seemann, J. Significant wave height measured by coherent X-band radar. IEEE Trans. Geosci. Remote. Sens. 2017, 55, 5355–5365. [Google Scholar] [CrossRef]
- Ermoshkin, A.; Kapustin, I. Estimation of the wind-driven wave spectrum using a high spatial resolution coherent radar. Russ. J. Earth Sci. 2019, 19, 1. [Google Scholar] [CrossRef] [Green Version]
- Ermoshkin, A.; Kapustin, I.; Molkov, A.; Bogatov, N. Determination of the sea surface current by a Doppler X-band radar. Fundam. Prikl. Gidrofiz. 2020, 13, 93–103. (In Russian) [Google Scholar] [CrossRef]
- Adibzade, M.; Shafieefar, M.; Akbari, H.; Panahi, R. Multi-peaked directional wave spectra based on extensive field measurement data in the Gulf of Oman. Ocean. Eng. 2021, 230, 109057. [Google Scholar] [CrossRef]
- Titchenko, Y.; Karaev, V.; Ryabkova, M.; Meshkov, E. Measurements of the sea surface parameters using a new modification of underwater sonar on a marine platform in the Black Sea. In Proceedings of the OCEANS 2019-Marseille, Marseille, France, 17–20 June 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Titchenko, Y.; Karaev, V.; Ryabkova, M.; Kuznetsova, A.; Meshkov, E. Peculiarities of the Acoustic Pulse Formation Reflected by the Water Surface: A Numerical Experiments and the Results of Long-term Measurements Using the “Kalmar” Sonar. In Proceedings of the OCEANS 2019-Marseille, Marseille, France, 17–20 June 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Salin, M.; Potapov, O.; Salin, B.; Chashchin, A. Measuring the characteristics of backscattering of sound on a rough surface in the near-field zone of a phased array. Acoust. Phys. 2016, 62, 74–88. [Google Scholar] [CrossRef]
- Badiey, M.; Eickmeier, J.; Song, A. Arrival-time fluctuations of coherent reflections from surface gravity water waves. J. Acoust. Soc. Am. 2014, 135, EL226–EL231. [Google Scholar] [CrossRef] [Green Version]
- Richards, E.L.; Song, H.C.; Hodgkiss, W.S. Observations of scatter from surface reflectors with Doppler sensitive probe signals. JASA Express Lett. 2021, 1, 016001. [Google Scholar] [CrossRef]
- Huang, C.F.; Li, Y.W.; Taniguchi, N. Mapping of ocean currents in shallow water using moving ship acoustic tomography. J. Acoust. Soc. Am. 2019, 145, 858–868. [Google Scholar] [CrossRef]
- Kaneko, A.; Zhu, X.H.; Lin, J. Coastal Acoustic Tomography; Elsevier: Amsterdam, The Netherlands, 2020. [Google Scholar]
- Chen, M.; Zhu, Z.N.; Zhang, C.; Zhu, X.H.; Zhang, Z.; Wang, M.; Zheng, H.; Zhang, X.; Chen, J.; He, Z.; et al. Mapping of tidal current and associated nonlinear currents in the Xiangshan Bay by coastal acoustic tomography. Ocean. Dyn. 2021, 71, 811–821. [Google Scholar] [CrossRef]
- Goncharov, V.; Kuryanov, B.; Serebryany, A. Local acoustic tomography on shelf of the Black Sea. Hydroacoustics 2013, 16, 67–76. [Google Scholar]
- Dahl, P.H.; Plant, W.J.; Nützel, B.; Schmidt, A.; Herwig, H.; Terray, E.A. Simultaneous acoustic and microwave backscattering from the sea surface. J. Acoust. Soc. Am. 1997, 101, 2583–2595. [Google Scholar] [CrossRef]
- Salin, B.M.; Salin, M.B.; Spindel, R.C. Calculation of the reverberation spectrum for Doppler-based sonar. Acoust. Phys. 2012, 58, 220–227. [Google Scholar] [CrossRef]
- Bjørnø, L. Chapter 5—Scattering of Sound. In Applied Underwater Acoustics; Neighbors, T.H., Bradley, D., Eds.; Elsevier: Amsterdam, The Netherlands, 2017; pp. 297–362. [Google Scholar] [CrossRef]
- Dolin, L.S.; Kondratyeva, M.I. On the possibility of reconstructing an anisotropic wind wave spectrum by the method of double-position sonar. Radiophys. Quantum Electron. 1995, 38, 93–97. [Google Scholar] [CrossRef]
- Hayek, C.S.; Schurman, I.W.; Sweeney, J.H.; Boyles, C.A. Azimuthal dependence of Bragg scattering from the ocean surface. J. Acoust. Soc. Am. 1999, 105, 2129–2141. [Google Scholar] [CrossRef]
- Urick, R.J. Principles of Underwater Sound, 3rd ed.; McGraw Hill Higher Education: Maidenhead, UK, 1983. [Google Scholar]
- Neighbors, T.; Bjørnø, L. Anomalous low frequency sea surface reverberation. Hydroacoustics 2001, 4, 181–192. [Google Scholar]
- Thorpe, S.A. On the clouds of bubbles formed by breaking wind-waves in deep water, and their role in air-sea gas transfer. Philos. Trans. R. Soc. London. Ser. A Math. Phys. Sci. 1982, 304, 155–210. [Google Scholar]
- Deane, G.B.; Stokes, M.D. Scale dependence of bubble creation mechanisms in breaking waves. Nature 2002, 418, 839–844. [Google Scholar] [CrossRef]
- Akulichev, V.; Bulanov, V.; Bugaeva, L. Features of Sound Propagation in the Presence of Bubble Clouds in the Perturbed Surface Layer of the Ocean. Dokl. Earth Sci. 2019, 487, 1002–1005. [Google Scholar] [CrossRef]
- Liu, R.; Li, Z. The Effects of Bubble Scattering on Sound Propagation in Shallow Water. J. Mar. Sci. Eng. 2021, 9, 1441. [Google Scholar] [CrossRef]
- Salin, B.; Salin, M. Formation Mechanisms for the Spectral Characteristis of Low-Frequency Reverberations and Predictive Estimates. Acoust. Phys. 2018, 64, 196–204. [Google Scholar] [CrossRef]
- Doisy, Y.; Deruaz, L.; van IJsselmuide, S.P.; Beerens, S.P.; Been, R. Reverberation suppression using wideband Doppler-sensitive pulses. IEEE J. Ocean. Eng. 2008, 33, 419–433. [Google Scholar] [CrossRef]
- Rui, G.; Xiao-tong, W.; Zhi-ming, C. Comparison research on reverberation strength excited by PTFM and CW signals. In Proceedings of the 2016 IEEE 13th International Conference on Signal Processing (ICSP), Chengdu, China, 6–10 November 2016; pp. 1677–1681. [Google Scholar] [CrossRef]
- Hartstra, I.; Colin, M.; Prior, M. Active sonar performance modelling for Doppler-sensitive pulses. Proc. Meet. Acoust. 2021, 44, 022001. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. Xgboost: A scalable tree boosting system. In Proceedings of the 22nd ACM Sigkdd International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 785–794. [Google Scholar]
- Ellis, D.D. A shallow-water normal-mode reverberation model. J. Acoust. Soc. Am. 1995, 97, 2804–2814. [Google Scholar] [CrossRef]
- Kazak, M.; Koshel, K.; Petrov, P. Generalized Form of the Invariant Imbedding Method and Its Application to the Study of Back-Scattering in Shallow-Water Acoustics. J. Mar. Sci. Eng. 2021, 9, 1033. [Google Scholar] [CrossRef]
- Lynch, J.; Newhall, A. Chapter 7—Shallow-Water Acoustics. In Applied Underwater Acoustics; Neighbors, T.H., Bradley, D., Eds.; Elsevier: Amsterdam, The Netherlands, 2017; pp. 403–467. [Google Scholar] [CrossRef]
- Razumov, D.; Salin, M. Features of sound diffraction on surface roughness in the middle-frequency range. Fundam. Prikl. Gidrofiz. 2021, 14, 98–110, (In Russian, see doi:10.1109/DD52349.2021.9598681 for a close English version). [Google Scholar] [CrossRef]
- Quinlan, J.R. Induction of decision trees. Mach. Learn. 1986, 1, 81–106. [Google Scholar] [CrossRef] [Green Version]
- Quinlan, J.R. C4. 5: Programs for Machine Learning; Elsevier: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Breiman, L.; Friedman, J.H.; Olshen, R.A.; Stone, C.J. Classification and Regression Trees; Routledge: New York, NY, USA, 2017. [Google Scholar]
- Friedman, J.H. Multivariate adaptive regression splines. Ann. Stat. 1991, 19, 1–67. [Google Scholar] [CrossRef]
- Roe, B.P.; Yang, H.J.; Zhu, J.; Liu, Y.; Stancu, I.; McGregor, G. Boosted decision trees as an alternative to artificial neural networks for particle identification. Nucl. Instruments Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2005, 543, 577–584. [Google Scholar] [CrossRef] [Green Version]
- Mouche, A.A.; Collard, F.; Chapron, B.; Dagestad, K.F.; Guitton, G.; Johannessen, J.A.; Kerbaol, V.; Hansen, M.W. On the Use of Doppler Shift for Sea Surface Wind Retrieval From SAR. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2901–2909. [Google Scholar] [CrossRef]
- Razumov, D.; Ermoshkin, A.; Kosteev, D.; Ponomarenko, A.; Salin, M. Dataset for Surface waves prediction based on acoustic backscattering. 2022. Available online: https://zenodo.org/record/6530915 (accessed on 23 May 2022).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency | North Projection | East Projection | Squared Wave Frequency | Wave Height |
|---|---|---|---|---|
| (Hz) | (Hz) | (Hz) | (Hz) | (cm) |
| 1320 | 0.0303 | 0.0595 | 0.0282 | 47 |
| 2020 | 0.0297 | 0.0612 | 0.0258 | 39 |
| 2080 | 0.0300 | 0.0585 | 0.0256 | 42 |
| 2720 | 0.0316 | 0.0580 | 0.0238 | 35 |
| Frequency | North Projection | East Projection | Squared Wave Frequency | Wave Height |
|---|---|---|---|---|
| (HZ) | (%) | (%) | (%) | (%) |
| 1320 | 288.3 | 78.0 | 32.6 | 116 |
| 2020 | 332.6 | 76.1 | 36.8 | 45.7 |
| 2080 | 233.4 | 63.9 | 36.9 | 103 |
| 2720 | 118.0 | 111.6 | 37.4 | 57.3 |
| Mean RMSE | std of RMSE | Max_Depth | n_Estimators | Learning_Rate | |
|---|---|---|---|---|---|
| 1320 Hz | 40.4 | 37.3 | 3 | 193 | 0.10 |
| 2020 Hz | 32.1 | 30.9 | 3 | 154 | 0.05 |
| 2080 Hz | 38.6 | 32.3 | 3 | 276 | 0.05 |
| 2720 Hz | 34.3 | 38.5 | 2 | 207 | 0.05 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ermoshkin, A.V.; Kosteev, D.A.; Ponomarenko, A.A.; Razumov, D.D.; Salin, M.B. Surface Waves Prediction Based on Long-Range Acoustic Backscattering in a Mid-Frequency Range. J. Mar. Sci. Eng. 2022, 10, 722. https://doi.org/10.3390/jmse10060722
Ermoshkin AV, Kosteev DA, Ponomarenko AA, Razumov DD, Salin MB. Surface Waves Prediction Based on Long-Range Acoustic Backscattering in a Mid-Frequency Range. Journal of Marine Science and Engineering. 2022; 10(6):722. https://doi.org/10.3390/jmse10060722
Chicago/Turabian StyleErmoshkin, Alexey V., Dmitry A. Kosteev, Alexander A. Ponomarenko, Dmitrii D. Razumov, and Mikhail B. Salin. 2022. "Surface Waves Prediction Based on Long-Range Acoustic Backscattering in a Mid-Frequency Range" Journal of Marine Science and Engineering 10, no. 6: 722. https://doi.org/10.3390/jmse10060722