1. Introduction
Underwater Wireless Sensor Network (UWSN) has become an active research area in recent years [
1,
2] and it has many potential applications in underwater security [
3], ocean resource exploration [
4], etc. One important research direction for UWSN is the target localization, as UWSN can provide much wider coverage with reasonable performance under the existing physical limitations of each sensor. The localization methods calculate the target location using various parameter measurement from each individual sensor [
5], such as the Time-Of-Arrival (TOA) [
6], the Time-Difference-of-Arrival (TDOA) [
7], the Angle-Of-Arrival (AOA) [
8], the Received Signal Strength (RSS) [
9], etc. Among these, the AOA-based localization method requires relatively less data exchange (angle-only) and lower hardware support [
10], as it does not rely on the time synchronization. In turn, many recent works show that it appears to be a promising technique in real applications [
11,
12,
13,
14,
15,
16]. The main contributions in this direction are mainly focused on the inaccurate sensor location [
11], the angle estimation robustness [
12,
13], and the time-variant acoustic propagation path [
14], and the sensor selection [
15,
16].
The sensor selection is an important process in the UWSN application, as it is impractical to use all sensors for localization due to the large detection range and the target signal transmission loss. In addition, the usage of the sensors is also constrained by the hardware costs, data storage space, and sensor battery life in the underwater scenarios. The purpose of sensor selection is to find a group of sensors that are the most necessary ones to obtain the optimal localization performance and, at the same time, the balance between the estimation accuracy and the number of activated sensors [
17,
18].
Sensor selection problem is always formulated as an optimization problem based on two commonly used criteria: to minimize the trace of the Cramér–Rao lower bound (CRLB) and to maximize the determinant of the Fisher information matrix (FIM). The sensor selection problem can be formulated as an integer programming (IP) problem under these criteria, and one Boolean vector is defined as an indicator to indicate the selected sensors. However, the IP problem is a NP-hard problem and difficult to solve. The straightforward method to obtain the optimal subset is to enumerate all the possible sensor combinations and select the optimal performance sensor subset, which is known as the exhaustive search method. However, this method is computationally intensive and does not apply in a practical environment. Consequently, many suboptimal methods have been proposed, including the convex optimization and other heuristic algorithms. Two heuristic methods, named “iterative swapping greedy (ISG)” and “best option filling (BOF)”, can also be used to obtain an optimal solution. Although the two methods have comparable performance with the SDR method, they still have the risk of local convergence. Thus, most literature dealt with the sensor selection problem by convex relaxation that relaxes the original nonconvex problem as a semidefinite program (SDP).
In [
19,
20], a convex optimization method was proposed for sensor selection, a linear measurement model was used and the problems were solved approximately by convex relaxation. Based on them, a sparsity promoting method for sensor selections aimed to minimize the number of selected sensors under a constraint on the target state estimation error in [
21,
22]. However, in the existing literature, the research of sensor selection problem hinges on the assumption of uncorrelated measurement noises. Later, the proposed sensor selection framework was valid for an arbitrary noise correlation matrix in [
23], and then the authors in [
24] considered a more complex scenario with correlated measurement noise, which was designed for sparse signal estimation, yet it is not suitable for three-dimensional space. In the aforementioned literature, some works on the following aspects has not been carried out. In 3-D space, the sensor selection problem becomes more challenging due to the increased size of the Fisher information matrix (two measurements: the azimuth angle and elevation angle), yet the existing AOA-based sensor selection method for 2-D space is not suitable for 3-D space [
25]. Furthermore, currently most of the literature on sensor selection normally assumed that the measurement noises of the sensors are ideally uncorrelated [
16,
17,
18,
19,
20,
21,
22]. However, in a dynamic marine environment with a similar acoustic background and sound propagation path, this assumption may not be satisfied [
26]. Although the authors in [
23] have studied the sensor selection with correlated measurement noises, yet it is not designed for 3-D space, and thus not suitable for the UWSN.
Motivated by the observations above, in this paper, we focus on the sensor selection problem using the 3-D AOA-based localization with correlated measurement noise in UWSN. The main contributions of this paper are outlined as follows:
In order to solve the AOA-based sensor selection problem in 3-D space, we propose a novel sensor selection method and introduce one Boolean vector with the azimuth angle and elevation angle measurements under correlated noises.
A sensor selection problem is formulated as an optimization problem by minimizing the CRLB for the 3-D AOA-based localization. The SDR solution is utilized to transform the optimization problem as convex SDPs, and then a randomization method is used to refine the quality of the SDP solution.
Simulation studies are presented to verify whether the proposed method can outperform the other methods and achieve the performance of the exhaustive search method at the cost of much lower complexity.
The rest of this paper is organized as follows: The 3-D AOA sensor selection problem with the correlated measurement noise is formulated in
Section 2.
Section 3 develops the nonconvex sensor selection optimization problem. The basic convex relaxation and a randomization method are described in
Section 4.
Section 5 presents the comprehensive simulation results, and the conclusion is drawn in
Section 6.
2. Problem Formulation
In this paper, we consider a 3-D underwater sensor network that is composed of
N distributed sensors with a stationary target, where
is the location of the sensors with
denoting matrix transpose.
is the unknown location of the target, it is assumed that
is a Gaussian random variable with a distribution as
, where
and
represent the mean and the covariance matrix of
. Note that each sensor can acquire the bearing measurement with azimuth and elevation angles in spherical coordinates, which can be utilized to localize the unknown target in the marine scenarios. The measurement model of the
sensor can be expressed as [
27]
where
is the noise-free measurement which is a nonlinear function of
and
, and
denotes the measurement noise. Using
for
and the vector form of the measurement model is given by
with
is the measurement noise vector with a Gaussian distribution
. Here,
is the noise variance, and the matrix
is not diagonal due to the noise measurements may be correlated among different sensors [
25]. It is assumed that
is an autoregressive matrix and each element
(row is
i and column is
j,
) denotes the correlation coefficient. Thus, the matrix
can be used for modeling noise correlations between distributed sensors in marine scenarios.
In the 3-D space, the AOA-based localization measurement becomes more challenging because of the increase in the size of the FIM from to , making the optimality analysis more cumbersome. Hence, the azimuth and elevation angle measurement models are introduced, respectively.
Using
as a reference, and
denotes the bearing measurement with azimuth and elevation angle in spherical coordinates [
28]. The azimuth angle measurement of the
sensor, takes the form
where
is the 4-quadrant arctangent,
, and we assume that
is the azumuth angle measurement noise vector following Gaussian distribution
.
The elevation angle measurement of the
sensor, we obtain
where
,
denotes the Euclidean norm,
, and we assume that
is the elevation angle measurement noise vector following Gaussian distribution
. Here, we denote the 3-D AOA-based measurement noise vector as
Thus, the measurement noise covariance matrix of the
N sensors with
measurements can be written as
where
and
are the azimuth and elevation angle noise variance, and the matrix
and
are not diagonal due to the noise measurements may be correlated among different sensors. It is assumed that
and
are autoregressive matrices and each element
(row is
i and column is
j,
) denotes the correlation coefficient.
The Jacobian matrix of the
measurements is given [
28]
The FIM for 3-D AOA localization with Gaussian problem yields
and
Next, we consider the sensor selection problem, which chooses the best subset from the sensor network to achieve the best localization accuracy. We are motivated to select the best subset with
M sensors of
N (
) active sensors that minimize the localization error, subject to a constraint on the number of active sensors. However, one 3-D AOA-based sensor is determined by azimuth and elevation angle measurements. Hence, we should select two measurement equations for the same sensor. For this reason, we introduce a Boolean vector:
where
denotes the sensor selection vector for the azimuth angle measurement, and
represents the sensor selection vector for the elevation angle measurement, respectively.
and
indicate whether or not the
sensor is selected by the azimuth angle measurement and the elevation angle measurement, respectively.
We define two matrices
(
) and
(
), which are related to Boolean selection vectors.
is a submatrix of
(
) after all rows corresponding to the unselected sensors have been removed, and the diagonal entries of
are formed by
, and
is expanded by
, respectively. Therefore, we can get the link of them as below:
and
From the above definition, when the selected sensor subset is obtained, the noise covariance matrix can be expressed:
Thus, we can get the FIM for the selected sensor subset with the Gaussian prior distribution:
3. Sensor Selection Method for the 3-D AOA-Based Localization
In this section, we derive the sensor selection method for the 3-D AOA-based localization with correlated measurement noise. Firstly, we consider a decomposition of the azimuth and elevation angle noise covariance matrix, and then the sensor selection problem with correlated measurement noise can be formulated as an optimization problem. Moreover, the A-optimality criterion (minimizing the trace of the CRLB) is used as the optimization objective. The decomposition of the noise covariance matrix for azimuth and elevation angle measurements can be given by, respectively,
where
,
are positive scalars to ensure
,
are positive definite matrices, and
is the identity matrix. Thus, we can obtain the decomposition of the noise covariance matrix for the 3-D AOA measurement as
and
,
. Substituting (
18) into (
15), we get
and
.
Using (
19), the second part of the right-hand side of (
16) can be expressed as
By using the matrix inversion lemma [
29], for matrices
,
,
, and
, the matrix inversion lemma states that
, which yields
, with
, and
, the (
20) can become
Substituting (
21) into (
16), it derives
Using (
22), we can explicitly establish the relationship between
and
. Since the A-optimality criterion, i.e., minimizing the
, is equivalent to minimize the mean squared error (MSE) estimation directly, which is used as the objective function. Hence, the optimization problem of the sensor selection can be formulated as
Note that (
23) is a non-convex optimization problem due to the presence of the Boolean selection variables. In what follows, we will transform the original non-convex problem into the semidefinite problem program (SDP) by convex relaxation.
4. Semidefinite Relaxation for Sensor Selection Problem
The sensor selection problem is described by the optimization problem in last section. Nevertheless, the original problem is a non-convex and NP-hard problem, which is difficult to solve. We propose a convex relaxation approach for the sensor selection problem with the correlated measurement noise. In addition, we also adopt a randomization method to improve the performance of the SDP method.
4.1. Sensor Selection Based on Semidefinite Relaxation Method
We define
and
in (
22) for the notational simplicity, thus, the equivalent transformation (
23) can be given by
where
is an auxiliary variable with symmetric structure, and
(or
) denote
(or
) is the positive semidefinite matrix. By using the Schurs complement, the first inequality constraint (
24) can be expressed as [
21]
Lately, another variable
is introduced and the above inequality constraint equivalently is given as
with
Note that using the inequalities (
26) and (
27) to minimize the
can force the variable
to reach its lower bound. Next, we can adopt the Schur complement to further decompose the first inequality constraint in (
19) into two linear matrix inequalities (LMIs):
Substituting (
28) into (
24), and the problem is expressed as
Obviously, the above problem has the form of SDP except for the non-convex constraint of the Boolean selection vector
. To tackle this difficulty, we substitute the convex
for nonconvex constraint
. Thus, the problem (
29) can be transformed to an SDP as
The SDP problem can be solved easily and efficiently by using an interior point algorithm. When the fractional vector
is solved, we can extract
and
form it. The simplest method is to determine the maximal
M weight value. Notably, the fractional vectors
and
are used to determine the sensor selection by the azimuth angle and elevation angle measurements, respectively. We can define a new fractional vector as
In the 3-D AOA-based scenario, the optimal sensor subset should be selected by the fractional vector . We can choose the maximal M weight from . In the rest of the paper, we call the above sensor selection method “SDP” since it is developed based on the SDP, to distinguish it from the other method proposed in the following subsection.
4.2. Sensor Selection Based on Semidefinite Relaxation with Randomization Method
We use a randomization method to improve the solution of the problem [
19]. The randomization method can generate a set of random fraction vectors related to the SDP solution, and a set of random Boolean selection vectors is given. Substitute each vector into the objective function and choose a vector with the minimum value. The Boolean constraint (
14) on the entries of
, we can introduce two auxiliary variables
and
together with the rank-one constraint
which also can be equivalent to
After relaxing the (non-convex) rank-one constraint (
32) to
, we can obtain
We can first use an interior-point algorithm to solve the above SDP method, and then we adopt a randomization method to improve the quality of the above SDP solution. The SDP with randomization algorithm is as follows:
Step 1:
Generate two random vectors , , and
Step 2:
For each sample, set the largest M elements as 1 and the rest as 0 to generate two feasible vectors and , respectively.
Step 3:
Get the selected sensor index of the two vectors and , that is, all the selected sensors of and as 1. Select the sensors have the same index (assume ), and then, choose the sensors from the rest of “1” sensors.
Step 4:
Enumerate each possible combination to compute the objective function, and the minimum value of the sensor subset is selected.
Since the sensor selection method is developed based on the randomization method after the SDP is solved, we call it “SDP with randomization” in the rest of the paper.
4.3. Complexity Analysis
The SDP can be solved by the interior-point method in the polynomial time [
29], and we first analyze the worst case complexities of the proposed method, and then compare with the exhaustive search method. From [
30], the worst case complexity of solving an SDP is
where
m is the number of equality constraints,
is the number of semidefinite cone constrains,
is the dimension of the
ith semidefinite cone, and
is the solution precision. The SDP (
34) in the SDP method has about
equality constraints, one semidefinite cone constraint
, and one semidefinite cone constraint of size
. Thus, the worst case complexity of solving (
34) is on the order of
. The exhaustive search method enumerates all the possible sensor subset with size
M from the sensor network with
N sensors and calculates the CRLB. The total number of subsets is
, and the exhaustive search method demands extremely high computation complexity is
. Obviously, the proposed method has a much lower computational complexity than the exhaustive search method.
5. Simulation Studies
In this section, simulations are presented to verify the performance of the proposed sensor selection method for the UWSN. For simplicity, we use “Exhaustive search” to denote the exhaustive search method, the method of the M closest sensors selected to the target is denoted by “Closest sensors”. We use “SDP” and “SDP with randomization” to denote the SDP solution without and with the randomization method, respectively. “All sensor” denotes all the sensors are activated to localize, and “Random selection” denotes the M sensors are selected at random.
In the following, we consider the sensor network with
sensors are randomly placed in a underwater 3-D cube region of size
. It is assumed that the distribution of target is given, and
,
. For the proposed method, to guarantee a positive definite
in (
18), we set
, where
is the minimum eigenvalue of
. Assuming that each sensor is omnidirectional, and this property can be achieved by the adoption of the circular array, the CRLB of the variance
[
5]
where
is the effective beam width defined by
,
is the radius of the sensor array, v is the speed of propagation in length unit per sample, and define the normalized root weighted mean squared (nrwms) source frequency by
L is the length of DFT, and
is the
points DFT of the taget signal, the array SNR defined by [
31]
where
R is the number of sensor devices, and we assume that the ambient noise at each sensor node has the same variance
.
We set the underwater average sound speed as , , , , , . Under this assumption, the variance and can be calculated assuming the sensing devices in a circular array.
We firstly fix the signal to noise ratio of the azimuth and elevation angle as
,
.
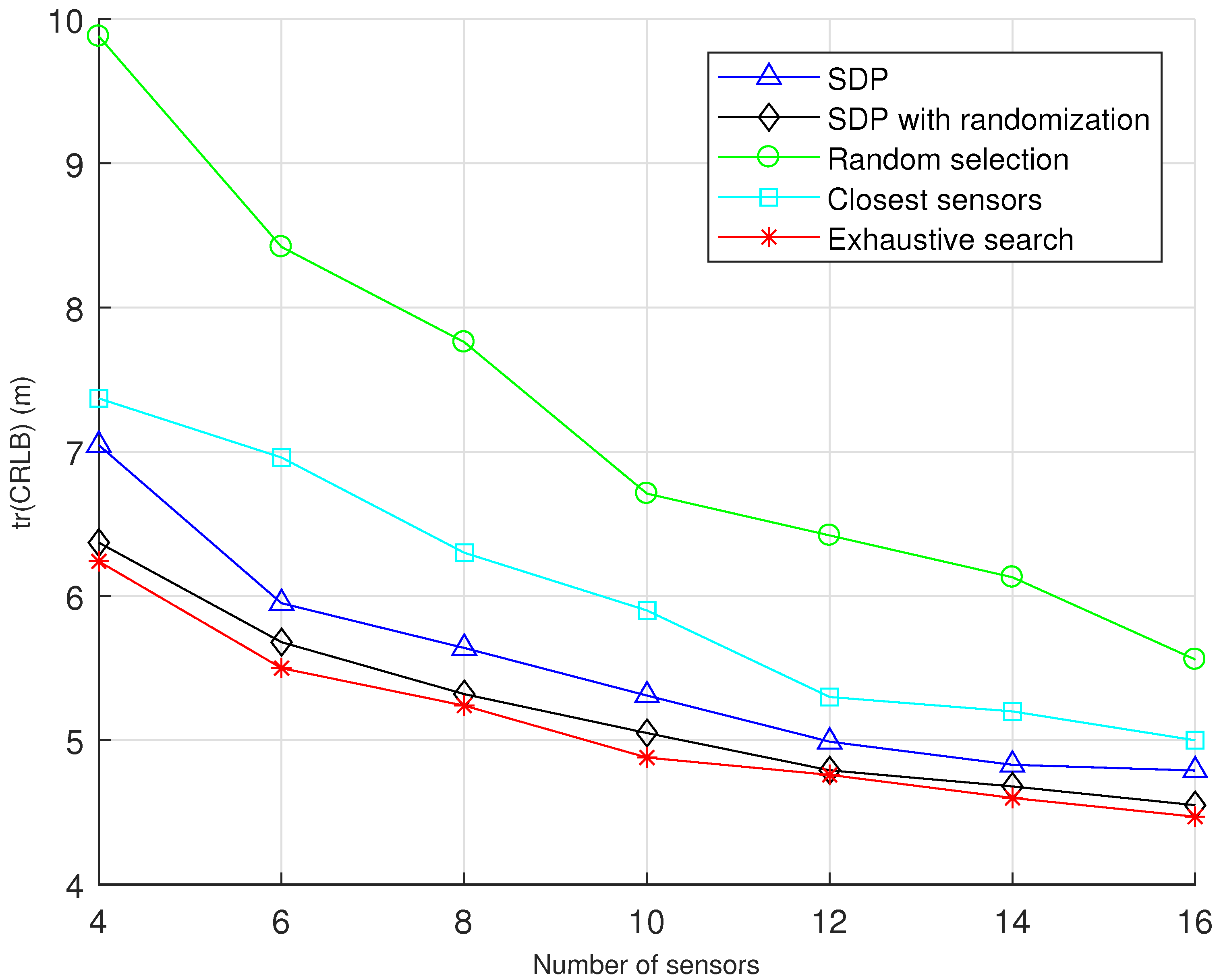
Figure 1 shows that the performance of the SDP methods without and with randomization when the
as
M varies from 4 to 16. It can be seen that the results have a better estimation performance compared with the random selection method and the closest sensors. Besides, we adopt the exhaustive search that lists all possible sensor selection solutions to obtain the global optimum. We can observe that the
decreases significantly as the number of sensors increase. Furthermore, the proposed SDP method with randomization has a better estimation performance than the without randomization method, which also approaches the exhaustive search method.
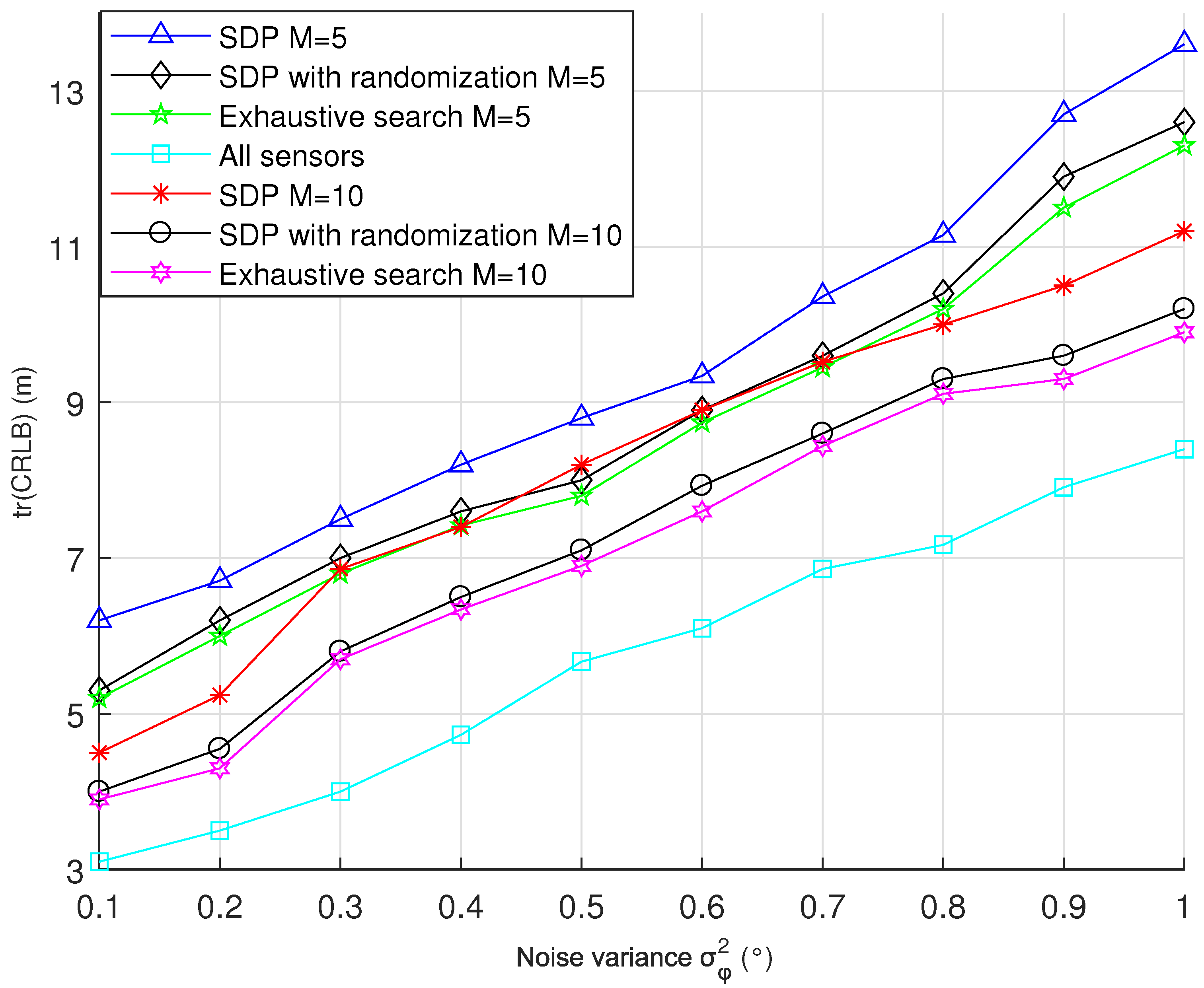
We next choose the number of selected sensors
and
, and vary the noise variance.
Figure 2 shows the
when
,
where
varies from
to
, it can be seen that the
increases with the increase of
both the proposed SDP methods with and without randomization. Moreover, the proposed SDR methods with randomization have a better estimation performance than the SDP method, and the SDP with randomization algorithm is always close to the exhaustive search method.
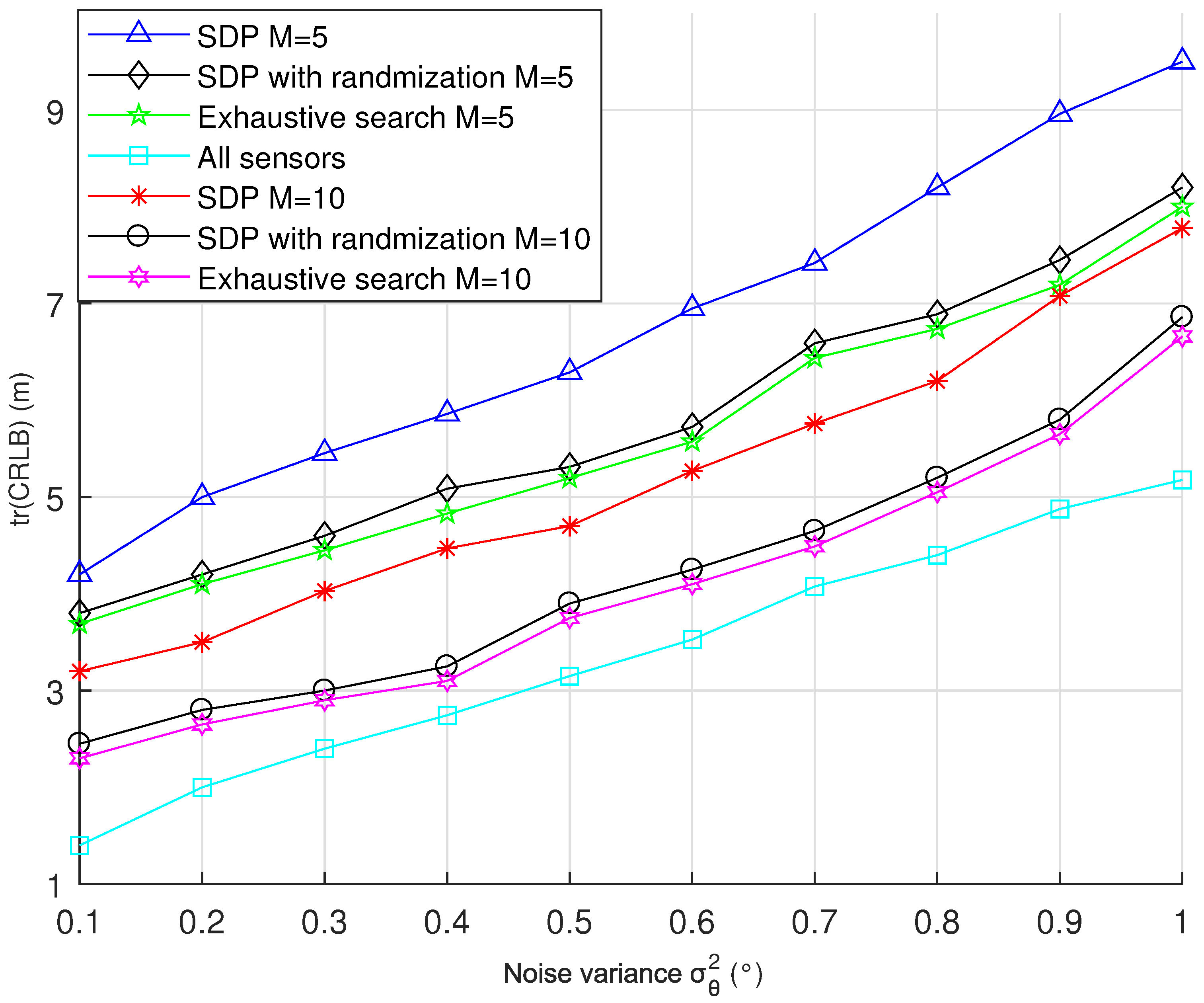
Figure 3 shows that the SDP with randomization method can obtain optimal estimation performance and close to the exhaustive search method when the number of selected sensors
and
.
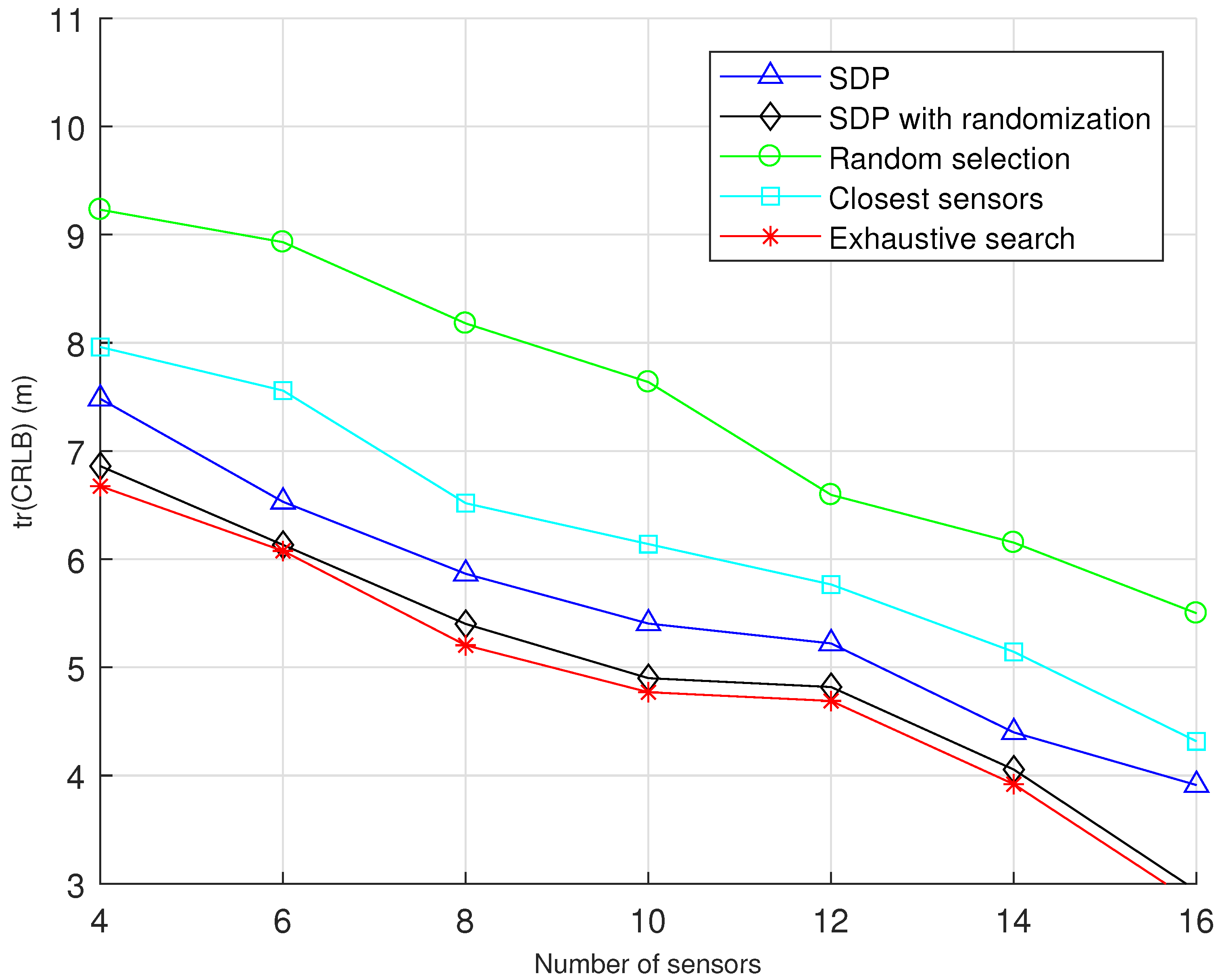
Figure 4 presents the
comparison of five different methods when the
,
. It is shown that the SDP with randomization always can obtain optimal estimation performance and is close to the exhaustive search method when the number of selected sensors is different. Besides, the
decreases with the increase of the number of selected sensors.
From the results, we can draw the conclusion that the SDP with randomization method has the optimal estimation performance when the noise measurements are identical or not.
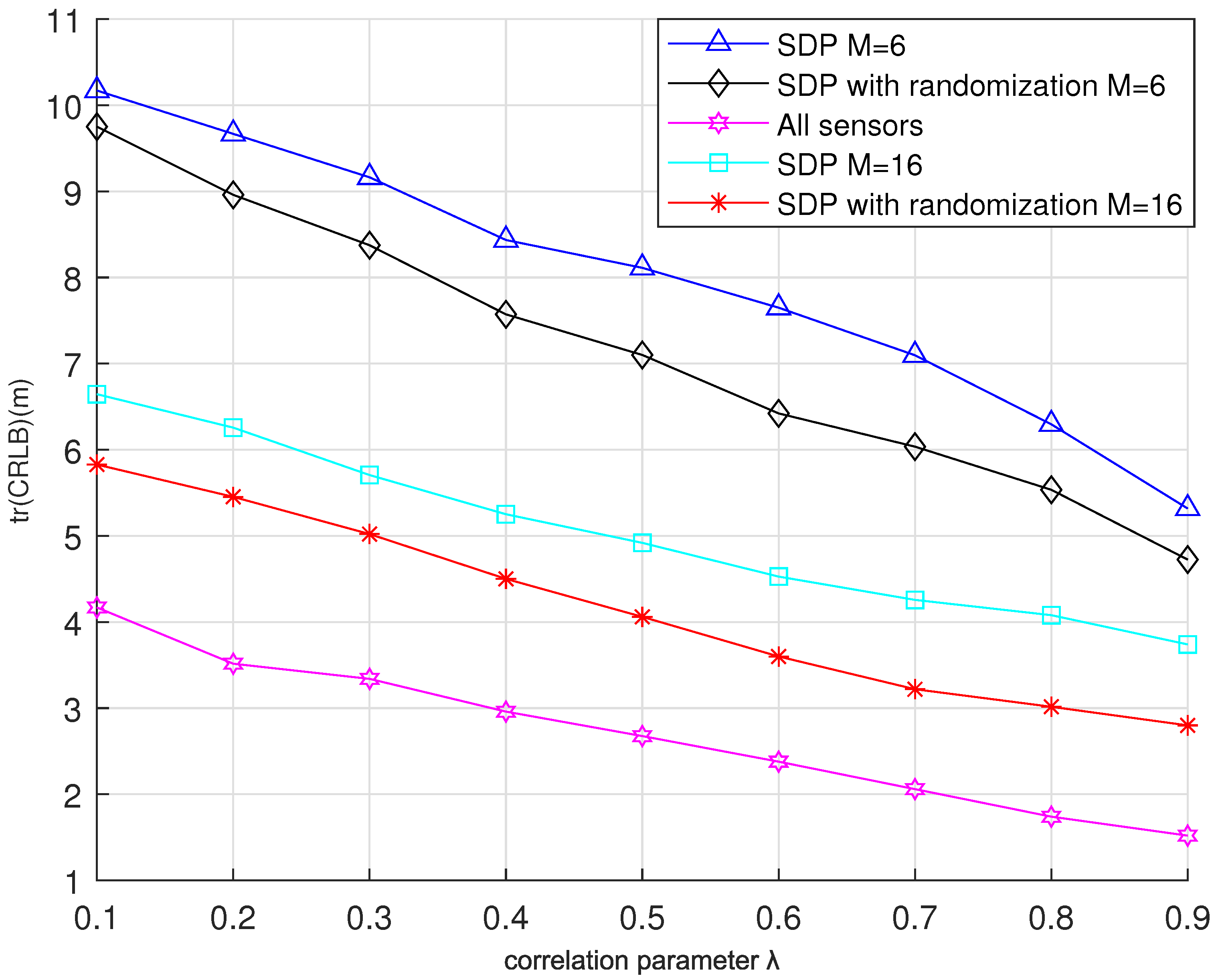
Then, we investigate the
when the correlation parameter
varies from 0.1 to 0.9, and the rest of the parameters are the same as
Figure 1.
Figure 5 presents the
comparison when
,
and all sensors in the localization system. The
decreases with the increase of correlation parameter, which is consistent with the results in [
25]. The noises can be reduced by subtracting one observation from the other due to the additive model with strongly correlated Gaussian noises, which can also obtain a better localization accuracy. Besides, the SDP with randomization method yields the optimal estimation performance.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




