
Development Issues of Healthcare Robots: Compassionate Communication for Older Adults with Dementia

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
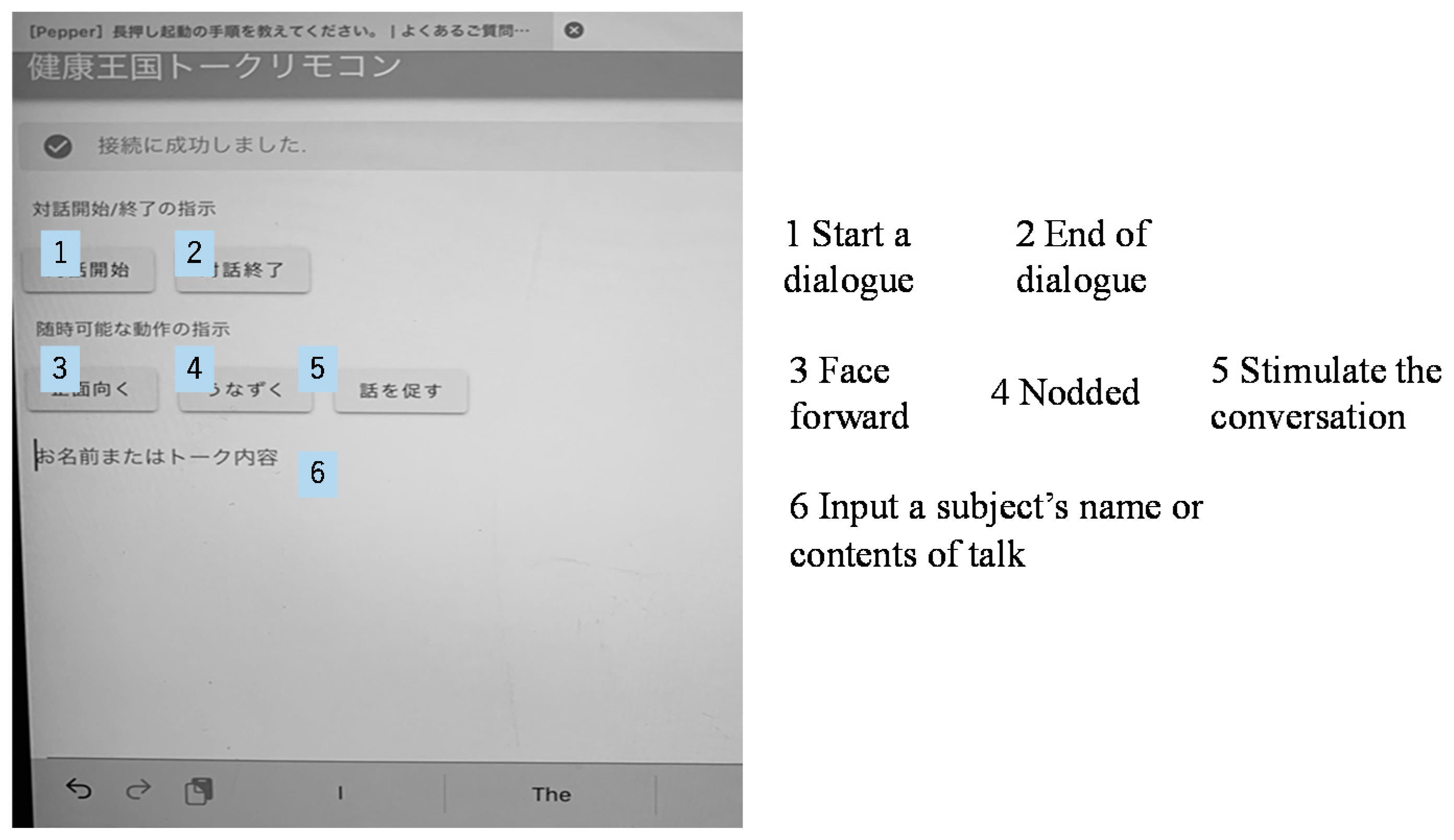
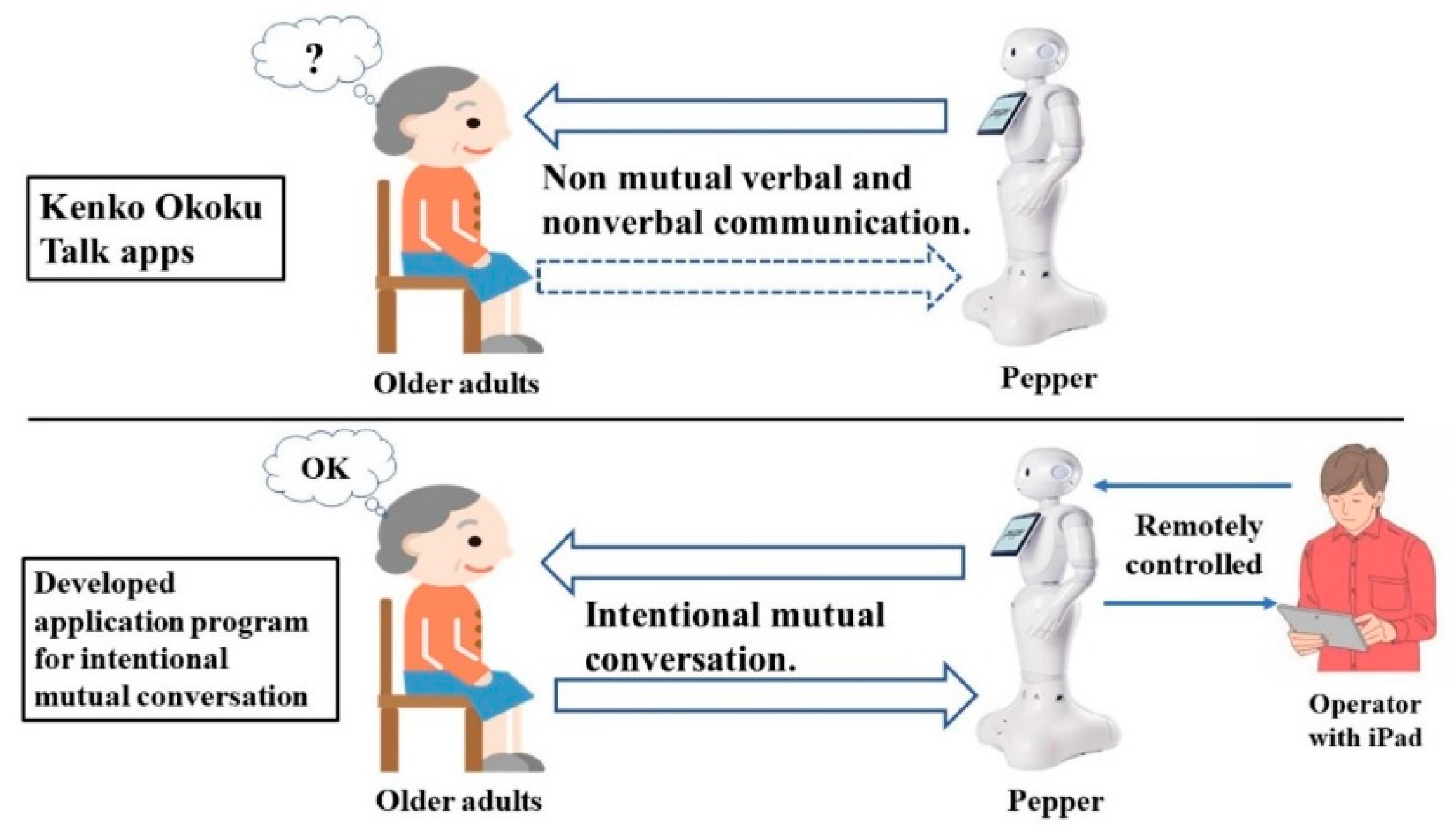
2.1. Description of Pepper—A Healthcare Robot with a Developed/Installed Application Program
2.2. Comparison of Application Programs for Intentional Mutual Conversations
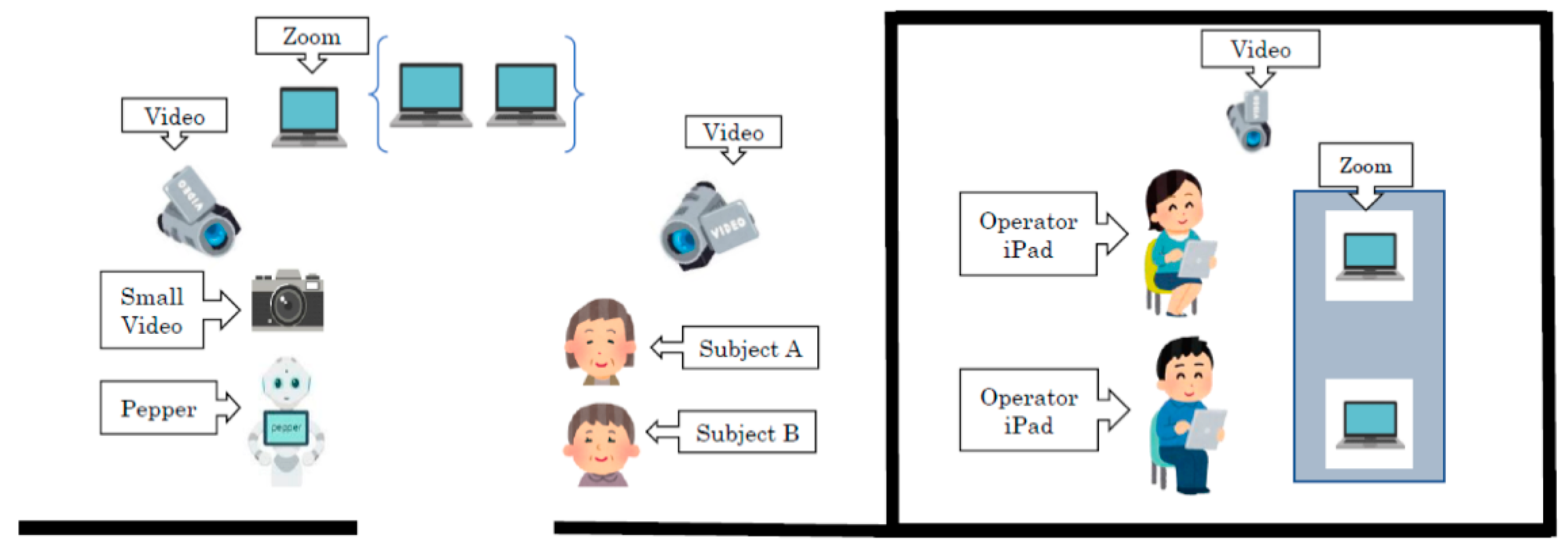
2.3. Procedure for Data Collection
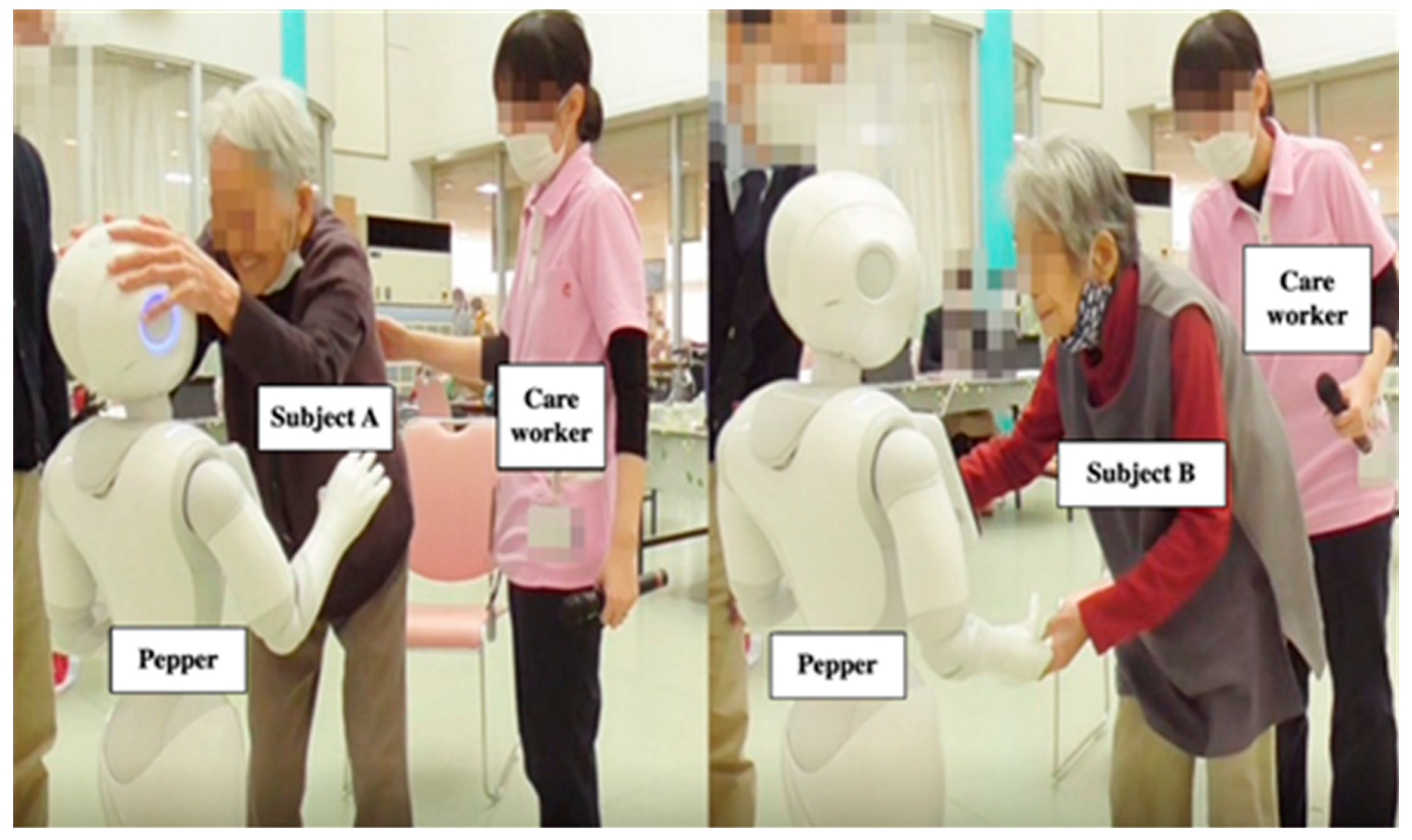
2.4. Setting of the Case Study
2.5. Ethical Considerations
3. Results
3.1. Accurate Sensing Behavior for “Listening” to Voices Appropriately and Accurately for Interaction with Subjects
3.2. Inefficiency in “Listening” and “Gaze” Activities
3.3. Fidelity of Behavioral Response
3.4. Deficiency in Natural Language Processing AI Development, i.e., the Ability to Respond Actively to Situations That Were not Pre-Programmed by the Developer
4. Discussion
4.1. Accurate Sensing Behavior for “Listening” to Voices Appropriately and Accurately for Interaction with Subjects
4.2. Inefficiency in “Listening” and “Gaze” Activities
4.3. Fidelity of Behavioral Response
4.4. Deficiency in Natural Language Processing AI Development, Ability to Respond Actively to Situations That Were Not Pre-Programmed by the Developer
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dethlefs, N.; Milders, M.; Cuayáhuitl, H.; Al-Salkini, T.; Douglas, L. A Natural Language-based Presentation of Cognitive Stimulation to People with Dementia in Assistive Technology: A Pilot Study. Inf. Health Soc. Care 2017, 42, 349–360. [Google Scholar] [CrossRef]
- Evans, I.E.M.; Llewellyn, D.J.; Matthews, F.E.; Woods, R.T.; Brayne, C.; Clare, L.; CFAS-Wales Research Team. Social Isolation, Cognitive Reserve, and Cognition in Healthy Older People. PLoS ONE 2018, 13, e0201008. [Google Scholar] [CrossRef] [Green Version]
- University College London. Socially Active 60-Year-Olds Face Lower Dementia Risk. Available online: www.sciencedaily.com/releases/2019/08/190802144414.htm (accessed on 3 September 2020).
- Ruthirakuhan, M.; Luedke, A.C.; Tam, A.; Goel, A.; Kurji, A.; Garcia, A. Use of Physical and Intellectual Activities and Socialization in the Management of Cognitive Decline of Aging and in Dementia: A Review. J. Aging Res. 2012, 384875. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- The Japan Times. EDITORIALS: Fill the Gap in Nursing Care Workers. Available online: https://www.japantimes.co.jp/opinion/2018/06/26/editorials/fill-gap-nursing-care-workers/. (accessed on 3 September 2020).
- Tanioka, T. Nursing and Rehabilitative Care of the Elderly Using Humanoid Robots. J. Med. Investig. 2019, 66, 19–23. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lane, G.W.; Noronha, D.; Rivera, A.; Craig, K.; Yee, C.; Mills, B.; Villanueva, E. Effectiveness of a Social Robot, “Paro,” in a VA Long-term Care Setting. Psychol. Serv. 2016, 13, 292–299. [Google Scholar] [CrossRef] [PubMed]
- Tobis, S.; Salatino, C.; Tapus, A.; Suwalska, A.; Wieczorowska-Tobis, K. Opinions about Robots in Care for Older People. In Proceedings of the 4th International Multidisciplinary Scientific Conference on Social Sciences and Arts SGEM2017, Albena, Bulgaria, 24–30 August 2017; Available online: https://www.elibrary.ru/item.asp?id=42744824 (accessed on 15 February 2021).
- Andtfolk, M.; Nyholm, L.; Eide, H.; Fagerström, L. Humanoid Robots in the Care of Older Persons: A Scoping Review. Assist. Technol. 2021. [Google Scholar] [CrossRef]
- Tanioka, T.; Smith, C.M.; Osaka, K.; Zhao, Y. Framing the Development of Humanoid Healthcare Robots in Caring Science. Int. J. Hum. Caring 2019, 23, 112–120. [Google Scholar] [CrossRef]
- Sinclair, S.; Norris, J.M.; McConnel, S.J.; Chochinov, H.M.; Hack, T.F.; Hagen, N.A.; McClement, S.; Bouchal, S.R. Compassion: A Scoping Review of the Healthcare Literature. BMC Palliat. Care 2016, 15. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dewar, B.; Nolan, M. Caring about Caring: Developing a Model to Implement Compassionate Relationship Centred Care in an Older People Care Setting. Int. J. Nurs. Stud. 2013, 50, 1247–1258. [Google Scholar] [CrossRef]
- Wasserman, I.C.; McNamee, S. Promoting Compassionate Care with the Older People: A Relational Imperative. Int. J. Older People Nurs. 2010, 5, 309–316. [Google Scholar] [CrossRef]
- de Vries, K. Communicating with Older People with Dementia. Nurs. Older People 2013, 25, 30–37. [Google Scholar] [CrossRef]
- Diño, M.J.S.; Ong, I.L. Research, Technology, Education & Scholarship in the Fourth Industrial Revolution [4IR]: Influences in Nursing and the Health Sciences. J. Med. Investig. 2019, 66, 3–7. [Google Scholar] [CrossRef] [Green Version]
- Wynsberghe, A. Healthcare Robots Ethics, Design and Implementation; Routledge: London, UK, 2015. [Google Scholar]
- Cruz-Sandoval, D.; Favela, J. Incorporating Conversational Strategies in a Social Robot to Interact with People with Dementia. Dement. Geriatr. Cogn. Disord. 2019, 47, 140–148. [Google Scholar] [CrossRef]
- Tanioka, T.; Osaka, K.; Locsin, R.; Yasuhara, Y.; Ito, H. Recommended Design and Direction of Development for Humanoid Nursing Robots Perspective from Nursing Researchers. Intell. Control. Autom. 2017, 8, 96–110. [Google Scholar] [CrossRef] [Green Version]
- Schachner, T.; Keller, R.; von Wangenheim, F. Artificial Intelligence-Based Conversational Agents for Chronic Conditions: Systematic Literature Review. J. Med. Internet Res. 2020, 22, e20701. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, H.; Terry, D.; Phan, H.; Vickers, J.; McInerney, F. Communication Training and Its Effects on Carer and Care-Receiver Outcomes in Dementia Settings: A Systematic Review. J. Clin. Nurs. 2019, 28, 1050–1069. [Google Scholar] [CrossRef] [PubMed]
- Banovic, S.; Zunic, L.J.; Sinanovic, O. Communication Difficulties as a Result of Dementia. Mater. Sociomed. 2018, 30, 221–224. [Google Scholar] [CrossRef]
- Fortunato, S.; Forli, F.; Guglielmi, V.; De Corso, E.; Paludetti, G.; Berrettini, S.; Fetoni, A.R. A Review of New Insights on the Association between Hearing Loss and Cognitive Decline in Ageing. Acta Otorhinolaryngol. Ital. 2016, 36, 155–166. [Google Scholar] [CrossRef] [PubMed]
- Osaka, K. Development of the Model for the Intermediary Role of Nurses in Transactive Relationships with Healthcare Robots. Int. J. Hum. Caring 2020, 24, 265–274. [Google Scholar]
- Osaka, K.; Tanioka, T.; Tanioka, R.; Kai, Y.; Locsin, R.C. Effectiveness of Care Robots, and the Intermediaries’ Role between and among Care Robots and Older Adults. In Proceedings of the 2020 IEEE/SICE International Symposium on System Integration (SII), Honolulu, HI, USA, 12–15 January 2020; pp. 611–616. [Google Scholar] [CrossRef]
- Russo, A.; D’Onofrio, G.; Gangemi, A.; Giuliani, F.; Mongiovi, M.; Ricciardi, F.; Greco, F.; Cavallo, F.; Dario, P.; Sancarlo, D.; et al. Dialogue Systems and Conversational Agents for Patients with Dementia: The Human-Robot Inter-action. Rejuvenation Res. 2019, 22, 109–120. [Google Scholar] [CrossRef]
- Agrawal, A.; Gans, J.S.; Goldfarb, A. What to Expect From Artificial Intelligence. Available online: https://static1.squarespace.com/static/578cf5ace58c62ac649ec9ce/t/589a5bfe20099e9d2837a707/1486511104226/What+to+Expect+From+Artificial+Intelligence.pdf (accessed on 15 January 2021).
- Kuipers, B. How Can We Trust a Robot? Commun. ACM 2018, 61, 86–95. [Google Scholar] [CrossRef]
- Yokoo, T.; Yamada, M.; Sakaino, S.; Abe, S.; Tsuji, T. Development of a Physical Therapy Robot for Rehabilitation Databases. In Proceedings of the 12th IEEE International Workshop on Advanced Motion Control (AMC), Sarajevo, Bosnia-Herzegovina, 25–27 March 2012. [Google Scholar] [CrossRef]
- Miyagawa, M.; Yasuhara, Y.; Tanioka, T.; Locsin, R.C.; Kongsuwan, W.; Catangui, E.; Matsumoto, K. The Optimization of Humanoid Robots Dialog in Improving Communication between Humanoid Robot and Older Adults. Intell. Control. Autom. 2019, 10, 118–127. [Google Scholar] [CrossRef] [Green Version]
- SoftBank Mobile Corp. SoftBank Mobile and Aldebaran Unveil “Pepper” the World’s First Personal Robot that Reads Emotions. Available online: https://www.softbank.jp/en/corp/group/sbm/news/press/2014/20140605_01/ (accessed on 15 January 2021).
- Noguchi, H.; Koyano, Y.; Mori, H.; Komiyama, C.; Sanada, H.; Mori, T. Exploration of Communication Robot Use for Older Patients in an Acute Hospital Based on Case Trials. J. Nurs. Sci. Eng. 2019, 6, 70–82. [Google Scholar] [CrossRef]
- Koyano, Y.; Noguchi, H.; Sanada, H. Can the Use of a Human-shaped Communication Robot Enhance Motivation for Inpatient Rehabilitation? J. Nurs. Sci. Eng. 2020, 7, 170–176. [Google Scholar] [CrossRef]
- Ishiguro, K.; Majima, Y. Utilization of Communication Robot in Patient Education. Stud. Health Technol. Inform. 2016, 225, 913–914. [Google Scholar] [PubMed]
- Riek, L.D. Wizard of Oz Studies in HRI: A Systematic Review and New Reporting Guidelines. J. Hum. Robot. Interact. 2012, 1, 119–136. [Google Scholar] [CrossRef] [Green Version]
- Imai, Y.; Hasegawa, K. The Revised Hasegawa’s Dementia Scale (HDS-R)-Evaluation of Its Usefulness as a Screening Test for Dementia. Hong Kong J. Psychiatry 1994, 4, 20–24. [Google Scholar]
- Willemse, C.; Marchesi, S.; Wykowska, A. Robot Faces that Follow Gaze Facilitate Attentional Engagement and Increase Their Likeability. Front. Psychol. 2018, 9, 70. [Google Scholar] [CrossRef] [Green Version]
- Kiilavuori, H.; Sariola, V.; Peltola, M.J.; Hietanen, J.K. Making Eye Contact with a Robot: Psychophysiological Responses to Eye Contact with a Human and with a Humanoid Robot. Biol. Psychol. 2021, 158, 107989. [Google Scholar] [CrossRef]
- Asada, M. Development of Artificial Empathy. Neurosci. Res. 2015, 90, 41–50. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sorbello, R.; Chella, A.; Giardina, M.; Nishio, S.; Ishiguro, H. An Architecture for Telenoid Robot as Empathic Conversational Android Companion for Elderly People. In Intelligent Autonomous Systems 13, Proceedings of the 13th International Conference IAS-13, Osaka, Japan, 9–12 November 2016; Menegatti, E., Michael, N., Berns, K., Yamaguchi, H., Eds.; Springer: Berlin/Heidelberg, Germany, 2016; pp. 939–953. [Google Scholar]
- Matheny, M.S.; Israni, T.; Ahmed, M.; Whicher, D. Artificial Intelligence in Health Care: The Hope, the Hype, the Promise, the Peril; National Academy of Medicine: Washington, DC, USA, 2019; pp. 1–245. [Google Scholar]
- Cross, E.S.; Hortensius, R.; Wykowska, A. From social brains to social robots: Applying neurocognitive insights to human-robot interaction. Philos. Trans. R. Soc. Lond. Ser. B Biol. Sci. 2019, 374, 20180024. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Foster, M.E. Natural language generation for social robotics: Opportunities and challenges. Philos. Trans. R. Soc. Lond. Ser. B Biol. Sci. 2019, 374, 20180027. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Breazeal, C. Role of expressive behaviour for robots that learn from people. Philos. Trans. R. Soc. Lond. Ser. B Biol. Sci. 2009, 364, 3527–3538. [Google Scholar] [CrossRef] [PubMed] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Application | Kenko Okoku Talk | Application Program for Intentional Mutual Conversation |
|---|---|---|
| Robot body | Pepper | Pepper |
| Features | Robot is able to | This new system allows: |
| ask questions to subject | The voicing of robot to be organized based on the situation | |
| answer question | Response time can be managed according to the conversation situation | |
| explain about certain topics | Conversation content can be inputted and managed in real time Engaging the robot and subject within a more ‘natural’ conversation Robot‘s head and face can be moved towards the conversation partner System includes template responses, questions, and replies that fit the conversation Enable the robot to communicate with multiple conversation partners | |
| Problems | 1. Asynchronous timing response, e.g., robot moves to the next topic while subject is still talking 2. The robot data base does not include ‘wait time’ for the interval between responses accurately 3. Robot‘s speed and the emotional “color” are difficult for the older persons to follow 4. Eye contact cannot be managed 5. Unable to communicate with multiple conversation partners | Needs human operator(s) to input the content and control the conversation in a timely manner and with appropriate “interval time”. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tanioka, T.; Yokotani, T.; Tanioka, R.; Betriana, F.; Matsumoto, K.; Locsin, R.; Zhao, Y.; Osaka, K.; Miyagawa, M.; Schoenhofer, S. Development Issues of Healthcare Robots: Compassionate Communication for Older Adults with Dementia. Int. J. Environ. Res. Public Health 2021, 18, 4538. https://doi.org/10.3390/ijerph18094538
Tanioka T, Yokotani T, Tanioka R, Betriana F, Matsumoto K, Locsin R, Zhao Y, Osaka K, Miyagawa M, Schoenhofer S. Development Issues of Healthcare Robots: Compassionate Communication for Older Adults with Dementia. International Journal of Environmental Research and Public Health. 2021; 18(9):4538. https://doi.org/10.3390/ijerph18094538
Chicago/Turabian StyleTanioka, Tetsuya, Tomoya Yokotani, Ryuichi Tanioka, Feni Betriana, Kazuyuki Matsumoto, Rozzano Locsin, Yueren Zhao, Kyoko Osaka, Misao Miyagawa, and Savina Schoenhofer. 2021. "Development Issues of Healthcare Robots: Compassionate Communication for Older Adults with Dementia" International Journal of Environmental Research and Public Health 18, no. 9: 4538. https://doi.org/10.3390/ijerph18094538