The Study of Walking, Walkability and Wellbeing in Immersive Virtual Environments



Abstract
:1. Introduction
2. Using Virtual Reality to Study Human Behavior and Mobility
3. Implementation of a VR Walking Simulator: A Pilot Test
3.1. Materials and Methods
3.1.1. The VR Simulator
- A walking controller. We used a commercial Virtuix Omni treadmill unit, an omnidirectional treadmill that allows walking in virtual environments. Walking in the virtual environment is performed by sliding on the low-friction surface of the Virtuix Omni using designated (over)shoes while connected to a harness (see Figure 1a and Video S1). While the movement is relatively simple, it is not entirely identical to natural walking due to the need to slightly lean forward during the walk and the rather “mechanical” turns that the treadmill imposes (see Video S1).
- A visual display unit. An HTC Vive Pro Eye HMD unit incorporating built-in eye-tracking capabilities was used. The HTC has a resolution display of 1440 × 1600 pixels per eye, refreshment speed of 90 Hz and a field of view of 110 degrees. The unit includes hand controllers that allow the user to interact with the virtual environment.
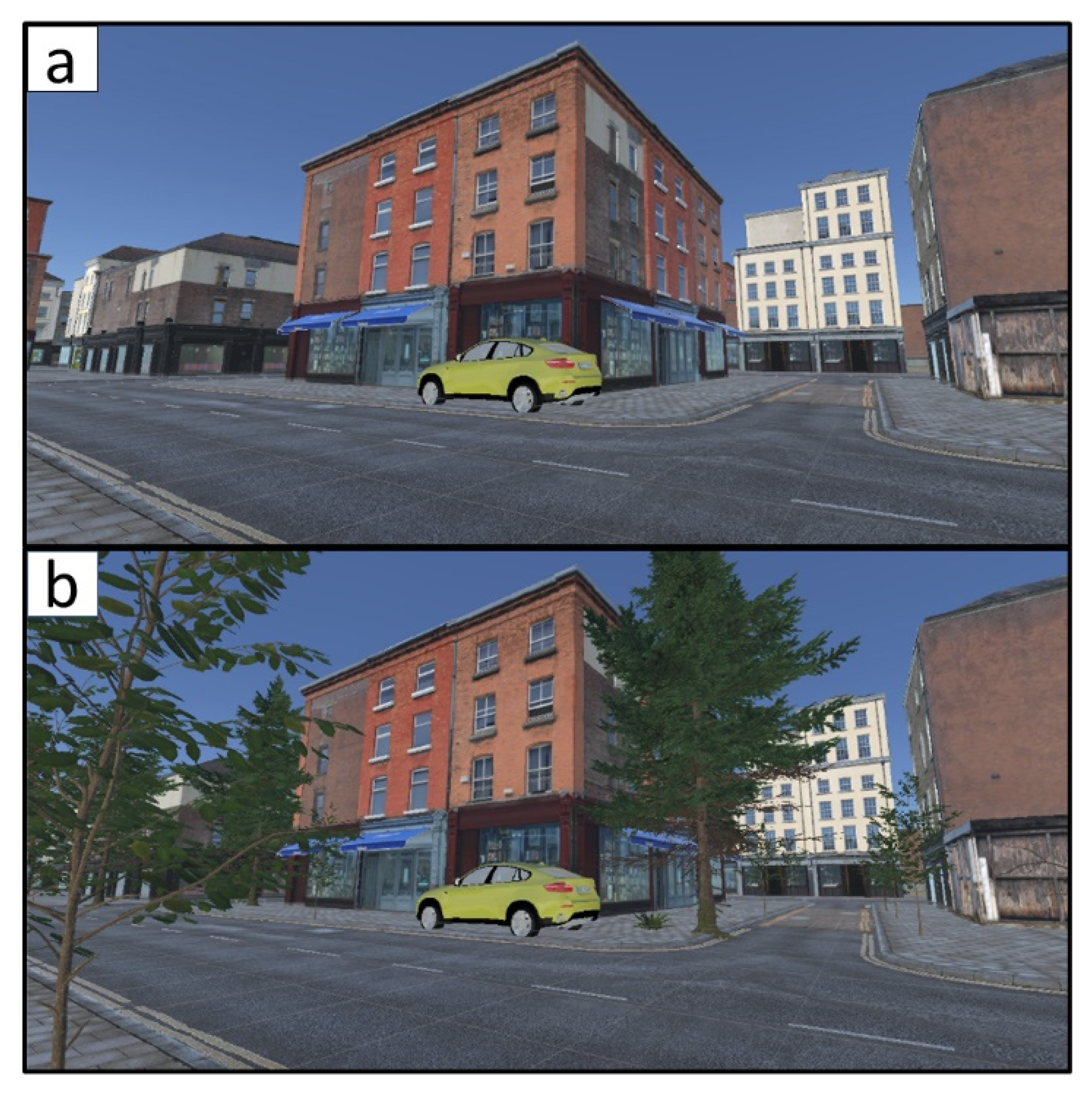
- An IVE. The IVE was developed within Unity, a cross-platform game engine. In the current experiment, the development of the environment was based on a virtual template of a typical modern urban neighborhood of mix-used buildings—both residential and commercial—as well as roads and sidewalks. Additional virtual elements such as cars, trees and people were purchased in Unity’s Asset Store and added in order to enrich the environment.
- The simulator software. The software that was developed by the authors served as the engine of the experiment. It facilitated setting the experimental conditions, controlling objects within the IVE (e.g., people and car movement), prompting questionnaires, logging data generated by the system (e.g., location coordinates) and more.
3.1.2. Participants and Procedure
3.2. Results
3.2.1. Self-Reports
3.2.2. Internal Sensors and System Logs
3.2.3. External Sensors
4. Methodological Guidelines for IVE Study Design
4.1. Choice of Technology
4.2. IVE Design
4.3. Sampling
4.4. Data Collection Procedure
4.5. Control Measurements
4.6. Preregistration
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Middlet, J. Walking in the City: The Geographies of Everyday Pedestrian Practices. Geogr. Compass 2011, 5, 90–105. [Google Scholar] [CrossRef]
- Andrews, G.J.; Hall, E.; Evans, B.; Colls, R. Moving beyond walkability: On the potential of health geography. Soc. Sci. Med. 2012, 75, 1925–1932. [Google Scholar] [CrossRef]
- Gebel, K.; Bauman, A.E.; Petticrew, M. The Physical Environment and Physical Activity. Am. J. Prev. Med. 2007, 32, 361–369. [Google Scholar] [CrossRef]
- Givoni, M.; Banister, D. Moving Towards Low Carbon Mobility; Edward Elgar Publishing: Cheltenham, UK, 2013. [Google Scholar]
- Cubukcu, E. Walking for Sustainable Living. Procedia Soc. Behav. Sci. 2013, 85, 33–42. [Google Scholar] [CrossRef] [Green Version]
- Robertson, R.; Robertson, A.; Jepson, R.; Maxwell, M. Walking for depression or depressive symptoms: A systematic review and meta-analysis. Ment. Health Phys. Act. 2012, 5, 66–75. [Google Scholar] [CrossRef]
- Doyle, S.; Kelly-Schwartz, A.; Schlossberg, M.; Stockard, J. Active Community Environments and Health: The Relationship of Walkable and Safe Communities to Individual Health. J. Am. Plan. Assoc. 2006, 72, 19–31. [Google Scholar] [CrossRef]
- Ewing, R.; Brownson, R.C.; Berrigan, D. Relationship Between Urban Sprawl and Weight of United States Youth. Am. J. Prev. Med. 2006, 31, 464–474. [Google Scholar] [CrossRef] [Green Version]
- Soroush, A.; Der Ananian, C.; Ainsworth, B.E.; Belyea, M.; Poortvliet, E.; Swan, P.D.; Walker, J.; Yngve, A. Effects of a 6-Month Walking Study on Blood Pressure and Cardiorespiratory Fitness in U.S. and Swedish Adults: ASUKI Step Study. Asian J. Sports Med. 2013, 4, 114–124. [Google Scholar] [CrossRef] [Green Version]
- Martens, K. Transport Justice: Designing Fair Transportation Systems; Routledge: New York, NY, USA, 2016. [Google Scholar]
- Row, A.T.; Jacobs, J. The Death and Life of Great American Cities. Yale Law J. 1962, 71, 1597. [Google Scholar] [CrossRef]
- Pucher, J.; Buehler, R. Walking and Cycling for Healthy Cities. Built Environ. 2010, 36, 391–414. [Google Scholar] [CrossRef]
- Rogers, S.H.; Halstead, J.M.; Gardner, K.H.; Carlson, C.H. Examining Walkability and Social Capital as Indicators of Quality of Life at the Municipal and Neighborhood Scales. Appl. Res. Qual. Life 2010, 6, 201–213. [Google Scholar] [CrossRef]
- Wood, L.; Frank, L.D.; Giles-Corti, B. Sense of community and its relationship with walking and neighborhood design. Soc. Sci. Med. 2010, 70, 1381–1390. [Google Scholar] [CrossRef] [PubMed]
- Lund, H. Testing the Claims of New Urbanism:Local Access, Pedestrian Travel, and Neighboring Behaviors. J. Am. Plan. Assoc. 2003, 69, 414–429. [Google Scholar] [CrossRef]
- Grant, J. Planning the Good Community: New Urbanism in Theory and Practice; Routledge: Abingdon, UK, 2006; Volume 9. [Google Scholar]
- Ewing, R.; Cervero, R. Travel and the Built Environment. J. Am. Plan. Assoc. 2010, 76, 265–294. [Google Scholar] [CrossRef]
- Talen, E.; Koschinsky, J. Compact, Walkable, Diverse Neighborhoods:Assessing Effects on Residents. Hous. Policy Debate 2014, 24, 717–750. [Google Scholar] [CrossRef]
- Ferrer, S.; Ruiz, T.; Mars, L. A qualitative study on the role of the built environment for short walking trips. Transp. Res. Part F Traffic Psychol. Behav. 2015, 33, 141–160. [Google Scholar] [CrossRef]
- Ettema, D.F.; Smajic, I. Walking, places and wellbeing. Geogr. J. 2015, 181, 102–109. [Google Scholar] [CrossRef]
- Frank, L.D.; Sallis, J.F.; Conway, T.L.; Chapman, J.E.; Saelens, B.E.; Bachman, W. Many Pathways from Land Use to Health: Associations between Neighborhood Walkability and Active Transportation, Body Mass Index, and Air Quality. J. Am. Plan. Assoc. 2006, 72, 75–87. [Google Scholar] [CrossRef]
- Bornioli, A.; Parkhurst, G.; Morgan, P.L. Affective experiences of built environments and the promotion of urban walking. Transp. Res. Part A Policy Pract. 2019, 123, 200–215. [Google Scholar] [CrossRef]
- Shalizi, C.R.; Thomas, A.C. Homophily and contagion are generically confounded in observational social network studies. Soc. Methods Res. 2011, 40, 211–239. [Google Scholar] [CrossRef] [Green Version]
- Yu, R.; Cheung, O.; Lau, K.K.L.; Woo, J. Associations between Perceived Neighborhood Walkability and Walking Time, Wellbeing, and Loneliness in Community-Dwelling Older Chinese People in Hong Kong. Int. J. Environ. Res. Public Health 2017, 14, 1199. [Google Scholar] [CrossRef] [PubMed]
- Gatrell, A.C. Therapeutic mobilities: Walking and ‘steps’ to wellbeing and health. Health Place 2013, 22, 98–106. [Google Scholar] [CrossRef] [PubMed]
- Chandrabose, M.; Cerin, E.; Mavoa, S.; Dunstan, D.W.; Carver, A.; Turrell, G.; Owen, N.; Giles-Corti, B.; Sugiyama, T. Neighborhood walkability and 12-year changes in cardio-metabolic risk: The mediating role of physical activity. Int. J. Behav. Nutr. Phys. Act. 2019, 16, 1–11. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tarlov, E.; Silva, A.; Wing, C.; Slater, S.; Matthews, S.A.; Jones, K.K.; Zenk, S.N. Neighborhood Walkability and BMI Change: A National Study of Veterans in Large Urban Areas. Obesity 2019, 28, 46–54. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Stanley, J.K.; Hensher, D.A.; Stanley, J.R.; Vella-Brodrick, D. Mobility, social exclusion and well-being: Exploring the links. Transp. Res. Part A Policy Pract. 2011, 45, 789–801. [Google Scholar] [CrossRef]
- A Oppezzo, M.; Schwartz, D.L. Give your ideas some legs: The positive effect of walking on creative thinking. J. Exp. Psychol. Learn. Mem. Cogn. 2014, 40, 1142–1152. [Google Scholar] [CrossRef] [Green Version]
- Ding, D.; Sallis, J.F.; Kerr, J.; Lee, S.; Rosenberg, D. Neighborhood Environment and Physical Activity Among Youth. Am. J. Prev. Med. 2011, 41, 442–455. [Google Scholar] [CrossRef]
- Sallis, J.F.; Floyd, M.F.; Rodríguez, D.A.; Saelens, B.E. Role of Built Environments in Physical Activity, Obesity, and Cardiovascular Disease. Circulation 2012, 125, 729–737. [Google Scholar] [CrossRef]
- McCormack, G.R.; Shiell, A. In search of causality: A systematic review of the relationship between the built environment and physical activity among adults. Int. J. Behav. Nutr. Phys. Act. 2011, 8, 125. [Google Scholar] [CrossRef] [Green Version]
- Bauman, A.; Reis, R.S.; Sallis, J.F.; Wells, J.C.; Loos, R.J.F.; Martin, B.W. Correlates of physical activity: Why are some people physically active and others not? Lancet 2012, 380, 258–271. [Google Scholar] [CrossRef]
- Pikora, T.; Giles-Corti, B.; Knuiman, M.W.; Bull, F.C.; Jamrozik, K.; Donovan, R.J. Neighborhood Environmental Factors Correlated with Walking Near Home. Med. Sci. Sports Exerc. 2006, 38, 708–714. [Google Scholar] [CrossRef] [PubMed]
- Middleton, J. ‘Stepping in Time’: Walking, Time, and Space in the City. Environ. Plan. A Econ. Space 2009, 41, 1943–1961. [Google Scholar] [CrossRef]
- Cao, X.; Mokhtarian, P.L.; Handy, S.L. The relationship between the built environment and nonwork travel: A case study of Northern California. Transp. Res. Part A Policy Pract. 2009, 43, 548–559. [Google Scholar] [CrossRef]
- Gao, J.; Kamphuis, C.B.M.; Helbich, M.; Ettema, D.F. What is ‘neighborhood walkability’? How the built environment differently correlates with walking for different purposes and with walking on weekdays and weekends. J. Transp. Geogr. 2020, 88, 102860. [Google Scholar] [CrossRef]
- Sugiyama, T.; Neuhaus, M.; Cole, R.; Giles-Corti, B.; Owen, N. Destination and Route Attributes Associated with Adults’ Walking. Med. Sci. Sports Exerc. 2012, 44, 1275–1286. [Google Scholar] [CrossRef]
- Ekkekakis, P.; Backhouse, S.H.; Gray, C.; Lind, E. Walking is popular among adults but is it pleasant? A framework for clarifying the link between walking and affect as illustrated in two studies. Psychol. Sport Exerc. 2008, 9, 246–264. [Google Scholar] [CrossRef]
- Resch, B.; Puetz, I.; Bluemke, M.; Kyriakou, K.; Miksch, J. An Interdisciplinary Mixed-Methods Approach to Analyzing Urban Spaces: The Case of Urban Walkability and Bikeability. Int. J. Environ. Res. Public Health 2020, 17, 6994. [Google Scholar] [CrossRef]
- Johansson, M.; Sternudd, C.; Kärrholm, M. Perceived urban design qualities and affective experiences of walking. J. Urban Des. 2016, 21, 256–275. [Google Scholar] [CrossRef]
- Loomis, J.M.; Blascovich, J.J.; Beall, A.C. Immersive virtual environment technology as a basic research tool in psychology. Behav. Res. Methods Instrum. Comput. 1999, 31, 557–564. [Google Scholar] [CrossRef] [Green Version]
- Fox, J.; Arena, D.; Bailenson, J.N. Virtual Reality. J. Media Psychol. 2009, 21, 95–113. [Google Scholar] [CrossRef]
- Mestre, D.R. CAVE versus Head-Mounted Displays: Ongoing thoughts. Electron. Imaging 2017, 2017, 31–35. [Google Scholar] [CrossRef]
- Anthes, C.; Garcia-Hernandez, R.J.; Wiedemann, M.; Kranzlmüller, D. State of the art of virtual reality technology. In Proceedings of the IEEE Aerospace Conference, Montana, MT, USA, 2–9 March 2019; pp. 1–19. [Google Scholar]
- Hooks, K.; Ferguson, W.; Morillo, P.; Cruz-Neira, C. Evaluating the user experience of omnidirectional VR walking simulators. Entertain. Comput. 2020, 34, 100352. [Google Scholar] [CrossRef]
- Cosma, G.; Ronchi, E.; Nilsson, D. Way-finding lighting systems for rail tunnel evacuation: A virtual reality experiment with Oculus Rift®. J. Transp. Saf. Secur. 2016, 8, 101–117. [Google Scholar] [CrossRef]
- Birenboim, A.; Dijst, M.; Ettema, D.F.; De Kruijf, J.; De Leeuw, G.; Dogterom, N. The utilization of immersive virtual environments for the investigation of environmental preferences. Landsc. Urban Plan. 2019, 189, 129–138. [Google Scholar] [CrossRef]
- Joseph, A.; Browning, M.H.E.M.; Jiang, S. Using Immersive Virtual Environments (IVEs) to Conduct Environmental Design Research: A Primer and Decision Framework. HERD: Heal. Environ. Res. Des. J. 2020, 13, 11–25. [Google Scholar] [CrossRef]
- Kuliga, S.; Thrash, T.; Dalton, R.; Hölscher, C. Virtual reality as an empirical research tool-Exploring user experience in a real building and a corresponding virtual model. Comput. Environ. Urban Syst. 2015, 54, 363–375. [Google Scholar] [CrossRef]
- Slater, M.; Wilbur, S. A framework for immersive virtual environments (FIVE): Speculations on the role of presence in virtual environments. Presence (Camb) 1997, 6, 603. [Google Scholar] [CrossRef]
- Witmer, B.G.; Singer, M.J. Measuring Presence in Virtual Environments: A Presence Questionnaire. Presence 1998, 7, 225–240. [Google Scholar] [CrossRef]
- De Kort, Y.A.W.; Meijnders, A.A.; Sponselee, A.A.-M.; Ijsselsteijn, W.W. What’s wrong with virtual trees? Restoring from stress in a mediated environment. J. Environ. Psychol. 2006, 26, 309–320. [Google Scholar] [CrossRef]
- Gorini, A.; Capideville, C.S.; De Leo, G.; Mantovani, F.; Riva, G. The Role of Immersion and Narrative in Mediated Presence: The Virtual Hospital Experience. Cyberpsychol. Behav. Soc. Netw. 2011, 14, 99–105. [Google Scholar] [CrossRef]
- Grassini, S.; Laumann, K. Questionnaire Measures and Physiological Correlates of Presence: A Systematic Review. Front. Psychol. 2020, 11, 349. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hartmann, T.; Wirth, W.; Schramm, H.; Klimmt, C.; Vorderer, P.; Gysbers, A.; Böcking, S.; Ravaja, N.; Laarni, J.; Saari, T.; et al. The Spatial Presence Experience Scale (SPES). J. Media Psychol. 2016, 28, 1–15. [Google Scholar] [CrossRef]
- Boletsis, C.; Cedergren, J.E. VR Locomotion in the New Era of Virtual Reality: An Empirical Comparison of Prevalent Techniques. Adv. Hum.-Comput. Interact. 2019, 2019, 1–15. [Google Scholar] [CrossRef]
- Kreimeier, J.; Ullmann, D.; Kipke, H.; Götzelmann, T. Initial Evaluation of Different Types of Virtual Reality Locomotion Towards a Pedestrian Simulator for Urban and Transportation Planning. In Proceedings of the Extended Abstracts of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; Association for Computing Machinery (ACM): New York, NY, USA, 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Sanchez, G.M.E.; Van Renterghem, T.; Sun, K.; De Coensel, B.; Botteldooren, D. Using Virtual Reality for assessing the role of noise in the audio-visual design of an urban public space. Landsc. Urban Plan. 2017, 167, 98–107. [Google Scholar] [CrossRef] [Green Version]
- Gao, T.; Zhang, T.; Zhu, L.; Qiu, L.; Gao, T.; Gao, Y.; Zhu, Q. Exploring Psychophysiological Restoration and Individual Preference in the Different Environments Based on Virtual Reality. Int. J. Environ. Res. Public Health 2019, 16, 3102. [Google Scholar] [CrossRef] [Green Version]
- O’Hern, S.; Oxley, J.; Stevenson, M. Validation of a bicycle simulator for road safety research. Accid. Anal. Prev. 2017, 100, 53–58. [Google Scholar] [CrossRef]
- Patterson, Z.; Darbani, J.M.; Rezaei, A.; Zacharias, J.; Yazdizadeh, A. Comparing text-only and virtual reality discrete choice experiments of neighbourhood choice. Landsc. Urban Plan. 2017, 157, 63–74. [Google Scholar] [CrossRef]
- Arellana, J.; Garzón, L.; Estrada, J.; Cantillo, V. On the use of virtual immersive reality for discrete choice experiments to modelling pedestrian behaviour. J. Choice Model. 2020, 100251, 100251. [Google Scholar] [CrossRef]
- Schwarz, N. Self-reports: How the questions shape the answers. Am. Psychol. 1999, 54, 93–105. [Google Scholar] [CrossRef]
- Antoniou, P.; Arfaras, G.; Pandria, N.; Athanasiou, A.; Ntakakis, G.; Babatsikos, E.; Nigdelis, V.; Bamidis, P.D. Biosensor Real-Time Affective Analytics in Virtual and Mixed Reality Medical Education Serious Games: Cohort Study. JMIR Serious Games 2020, 8, e17823. [Google Scholar] [CrossRef]
- Robinson, E.; Michaelis, K.; Thompson, J.C.; Wiener, M. Temporal and spatial discounting are distinct in humans. Cognition 2019, 190, 212–220. [Google Scholar] [CrossRef] [PubMed]
- Ries, B.; Interrante, V.; Kaeding, M.; Anderson, L. The effect of self-embodiment on distance perception in immersive virtual environments. In Proceedings of the 2008 ACM symposium on Applied computing-SAC ’08, Ceara, Brazil, 16–20 March 2008; Association for Computing Machinery (ACM): New York, NY, USA; pp. 167–170. Available online: https://www-users.cs.umn.edu/~interran/vrst08.pdf (accessed on 5 January 2021).
- Boletsis, C. The New Era of Virtual Reality Locomotion: A Systematic Literature Review of Techniques and a Proposed Typology. Multimodal Technol. Interact. 2017, 1, 24. [Google Scholar] [CrossRef] [Green Version]
- Birenboim, A.; Dijst, M.; Scheepers, F.E.; Poelman, M.; Helbich, M. Wearables and Location Tracking Technologies for Mental-State Sensing in Outdoor Environments. Prof. Geogr. 2019, 71, 449–461. [Google Scholar] [CrossRef]
- Li, B.; Zhu, C.; Li, S.; Zhu, T. Identifying Emotions from Non-Contact Gaits Information Based on Microsoft Kinects. IEEE Trans. Affect. Comput. 2018, 9, 585–591. [Google Scholar] [CrossRef]
- Lessiter, J.; Freeman, J.; Keogh, E.; Davidoff, J.B. A Cross-Media Presence Questionnaire: The ITC-Sense of Presence Inventory. Presence: Teleoperators Virtual Environ. 2001, 10, 282–297. [Google Scholar] [CrossRef] [Green Version]
- Button, K.S.; Ioannidis, J.P.A.; Mokrysz, C.; Nosek, B.A.; Flint, J.; Robinson, E.S.J.; Munafò, M.R. Power failure: Why small sample size undermines the reliability of neuroscience. Nat. Rev. Neurosci. 2013, 14, 365–376. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jiang, Y.; Paquette, L.; Baker, R.S.; Clarke-Midura, J. Comparing novice and experienced students within virtual performance assessments. In Proceedings of the International Conference on Educational Data Mining (EDM); International Educational Data Mining Society, Madrid, Spain, 26–29 June 2015. [Google Scholar]
- Kourtesis, P.; Collina, S.; Doumas, L.A.A.; MacPherson, S.E. Validation of the Virtual Reality Neuroscience Questionnaire: Maximum Duration of Immersive Virtual Reality Sessions Without the Presence of Pertinent Adverse Symptomatology. Front. Hum. Neurosci. 2019, 13, 417. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rubin, M. The perceived awareness of the research hypothesis scale: Assessing the influence of demand characteristics. J. Contrib. 2016. [Google Scholar] [CrossRef]
- Strack, F.; Schwarz, N.; Bless, H.; Kübler, A.; Wänke, M. Awareness of the influence as a determinant of assimilation versus contrast. Eur. J. Soc. Psychol. 1993, 23, 53–62. [Google Scholar] [CrossRef]
- Gelman, A.; Loken, E. The statistical crisis in science: Data-dependent analysis--a “garden of forking paths”--explains why many statistically significant comparisons don’t hold up. Am. Sci. 2014, 102, 460. [Google Scholar] [CrossRef]
- Gramann, K.; Gwin, J.T.; Ferris, D.P.; Oie, K.; Jung, T.-P.; Lin, C.-T.; Liao, L.-D.; Makeig, S. Cognition in action: Imaging brain/body dynamics in mobile humans. Rev. Neurosci. 2011, 22, 593–608. [Google Scholar] [CrossRef] [PubMed]
- Jones, B. A reappraisal of the use of infrared thermal image analysis in medicine. IEEE Trans. Med. Imaging 1998, 17, 1019–1027. [Google Scholar] [CrossRef] [PubMed]
- Cruz-Albarran, I.A.; Benitez-Rangel, J.P.; Osornio-Rios, R.A.; Morales-Hernandez, L.A. Human emotions detection based on a smart-thermal system of thermographic images. Infrared Phys. Technol. 2017, 81, 250–261. [Google Scholar] [CrossRef]
- Osborne, T.; Jones, P. Biosensing and geography: A mixed methods approach. Appl. Geogr. 2017, 87, 160–169. [Google Scholar] [CrossRef]
- Canning, C.G.; Allen, N.E.; Nackaerts, E.; Paul, S.S.; Nieuwboer, A.; Gilat, M. Virtual reality in research and rehabilitation of gait and balance in Parkinson disease. Nat. Rev. Neurol. 2020, 16, 409–425. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| P1 | P2 | P3 | P4 | |||||
|---|---|---|---|---|---|---|---|---|
| Participants’ Characteristics | ||||||||
| Gender, Age Group | Male, 30–45 | Female, 30–45 | Female, 30–45 | Female, 30–45 | ||||
| Experience with Simulator | Experienced | Experienced | Novice | Novice | ||||
| 1st Run | 2nd Run | 1st Run | 2nd Run | 1st Run | 2nd Run | 1st Run | 2nd Run | |
| Self-reports | ||||||||
| Real-time questions | ||||||||
| I enjoyed walking a | 5 | 6 | 4 | 6 | 5 | 5 | 4 | 6 |
| Built-in sensors | ||||||||
| Location and time | ||||||||
| Walking duration (seconds) | 30 | 31 | 30 | 26 | 25 | 23 | 123 | 59 |
| Walking distance (meters) | 74.49 | 71.65 | 71.05 | 71.87 | 71.76 | 70.50 | 79.45 | 73.78 |
| Speed (kmph) | 8.94 | 8.32 | 8.53 | 9.95 | 10.33 | 11.03 | 2.33 | 4.50 |
| Eye tracking b | ||||||||
| Yellow car (ms) | 1110 | 1021 | 1606 | 3401 | 910 | 0 | 44 | 65 |
| Bookshop (ms) | 2031 | 1116 | 0 | 0 | 0 | 0 | 8776 | 0 |
| External sensors | ||||||||
| Biosensors | ||||||||
| EDA (avg μS, stdv) | 23.055, 3.260 | 28.401, 0.600 | 9.745, 0.413 | 10.320, 0.331 | 12.596, 1.182 | 15.990, 0.339 | 4.435, 0.611 | 9.302, 0.458 |
| HR (avg bpm, stdv) | 115.121, 3.555 | 100.473, 2.241 | 83.245, 1.705 | 92.255, 0.256 | 102.234, 4.215 | 110.728, 0.474 | 82.084, 11.335 | 86.249, 4.127 |
| Gait (inertial) sensors | ||||||||
| Number of steps | 32 | 26 | 41 | 36 | 24 | 20 | 108 | 55 |
| Cadence (steps/min) | 70.42 | 58.76 | 71.68 | 77.14 | 74.93 | 59.08 | 56.64 | 57.73 |
| Step regularity | 0.356 | 0.272 | 0.093 | 0.132 | 0.139 | 0.225 | 0.162 | 0.167 |
| Step symmetry | 0.925 | 0.902 | 0.601 | 0.841 | 0.622 | 0.806 | 0.844 | 0.895 |
| Basic Condition (1st Run) | Green Condition (2nd Run) | T-Test (Paired, 1tail) | ||||
|---|---|---|---|---|---|---|
| Average | Stdv | Average | Stdv | t-Statistics | p-Value | |
| Self-reports | ||||||
| I enjoyed walking | 4.50 | 0.58 | 5.75 | 0.50 | −2.611 | 0.040 ** |
| Internal sensors | ||||||
| Walking duration (seconds) | 52.00 | 47.39 | 34.75 | 16.50 | 1.105 | 0.175 |
| Walking distance (meters) | 74.19 | 3.81 | 71.95 | 1.36 | 1.636 | 0.100 * |
| Speed (kmph) | 7.53 | 3.55 | 8.45 | 2.86 | −1.545 | 0.110 |
| Yellow car (ms) | 917.50 | 651.70 | 1121.75 | 1589.57 | −0.359 | 0.372 |
| Bookshop (ms) | 2701.75 | 4161.14 | 279.00 | 558.00 | 1.138 | 0.169 |
| External sensors | ||||||
| EDA (avg) | 12.46 | 7.83 | 16.00 | 8.77 | −3.302 | 0.023 ** |
| EDA (stdv) | 1.37 | 1.30 | 0.43 | 0.13 | 1.557 | 0.109 |
| HR (avg) | 95.67 | 15.92 | 97.43 | 10.61 | −0.315 | 0.387 |
| HR (stdv) | 5.20 | 4.22 | 1.77 | 1.80 | 2.488 | 0.044 ** |
| Number of steps | 51.25 | 38.47 | 34.25 | 15.33 | 1.416 | 0.126 |
| Cadence (steps/min) | 68.42 | 8.08 | 63.18 | 9.33 | 1.034 | 0.189 |
| Step regularity | 0.19 | 0.12 | 0.20 | 0.06 | −0.320 | 0.385 |
| Step symmetry | 0.75 | 0.16 | 0.86 | 0.05 | −1.877 | 0.079 * |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Birenboim, A.; Ben-Nun Bloom, P.; Levit, H.; Omer, I. The Study of Walking, Walkability and Wellbeing in Immersive Virtual Environments. Int. J. Environ. Res. Public Health 2021, 18, 364. https://doi.org/10.3390/ijerph18020364
Birenboim A, Ben-Nun Bloom P, Levit H, Omer I. The Study of Walking, Walkability and Wellbeing in Immersive Virtual Environments. International Journal of Environmental Research and Public Health. 2021; 18(2):364. https://doi.org/10.3390/ijerph18020364
Chicago/Turabian StyleBirenboim, Amit, Pazit Ben-Nun Bloom, Hila Levit, and Itzhak Omer. 2021. "The Study of Walking, Walkability and Wellbeing in Immersive Virtual Environments" International Journal of Environmental Research and Public Health 18, no. 2: 364. https://doi.org/10.3390/ijerph18020364