
Novel Expressions for the Derivatives of Sixth Kind Chebyshev Polynomials: Spectral Solution of the Non-Linear One-Dimensional Burgers’ Equation


Abstract
:1. Introduction
- Some of the fundamental formulas concerned with the Chebyshev polynomials of the sixth kind such as the power form representation, inversion formula and the moments formula are not difficult in deriving;
- Chebyshev polynomials of the sixth kind have a trigonometric representation which simplifies the derivation of some formulas concerned with them;
- The linearization coefficients of these polynomials were derived before in Reference [8] in an explicit simple expression. These coefficients are crucial in the implementation of our proposed numerical algorithm in the current paper.
2. An Overview on the Generalized Ultraspherical Polynomials and Chebyshev Polynomials of the Sixth Kind
2.1. An Overview on the Generalized Ultraspherical Polynomials
2.2. Some Fundamental Properties of Sixth Kind Chebyshev Polynomials
3. Derivatives Expressions of Sixth Kind Chebyshev Polynomials
4. Spectral Tau Algorithm for One-Dimensional Burgers’ Equation
5. Convergence of the Double Chebyshev Expansion
- The expansion coefficients , satisfy, ;
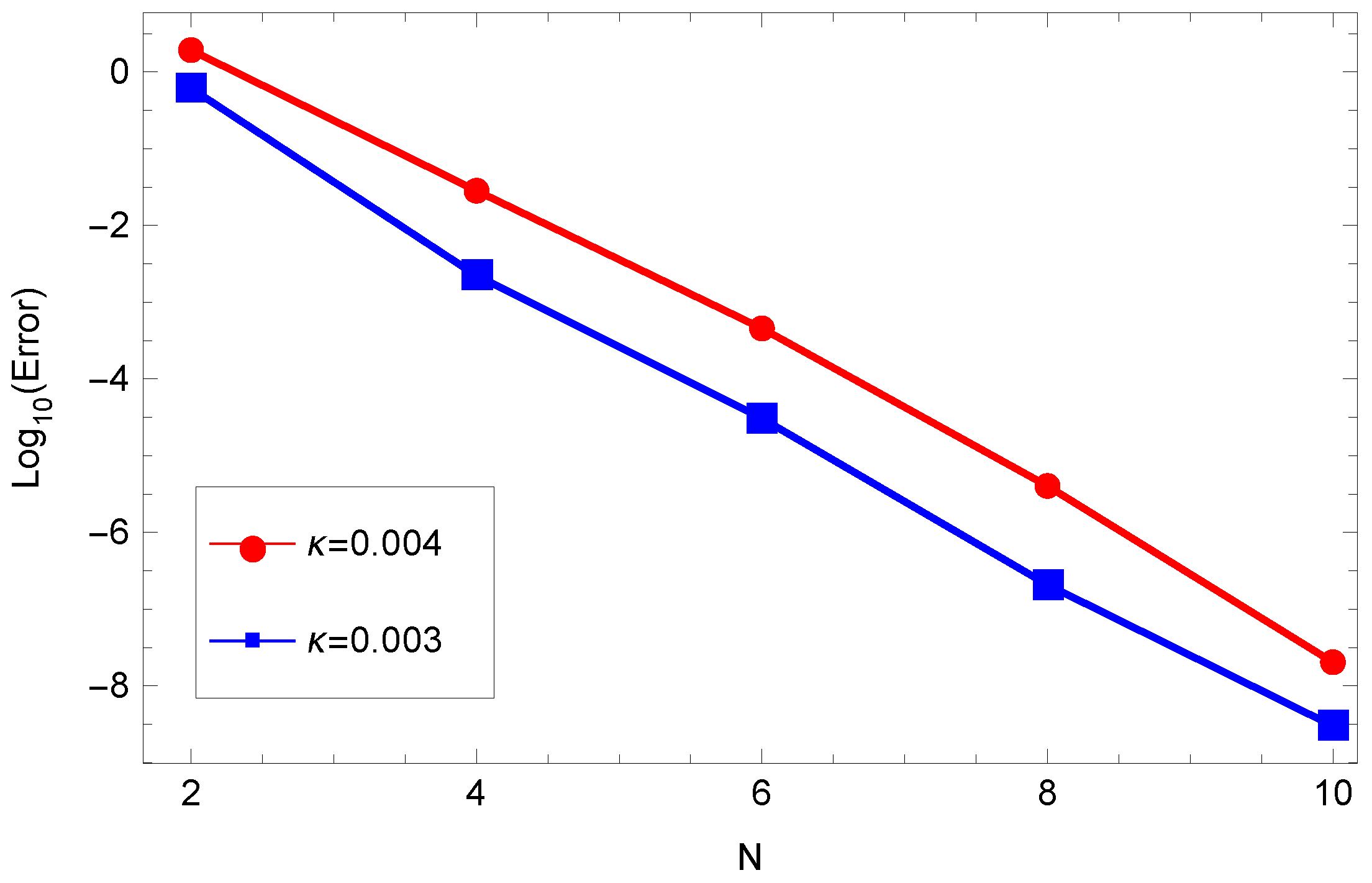
- The trunction error estimate is dominated by the following estimate .
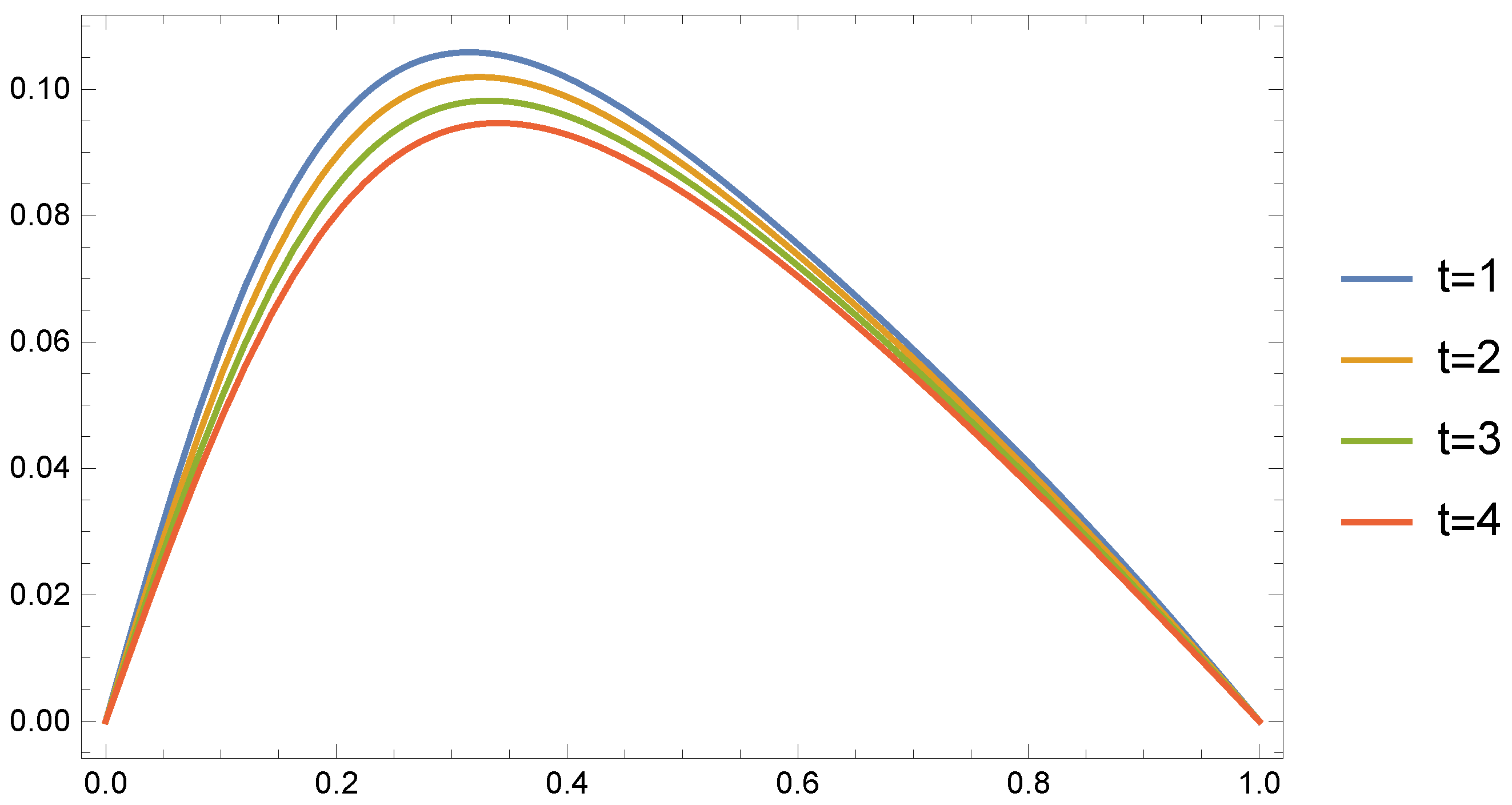
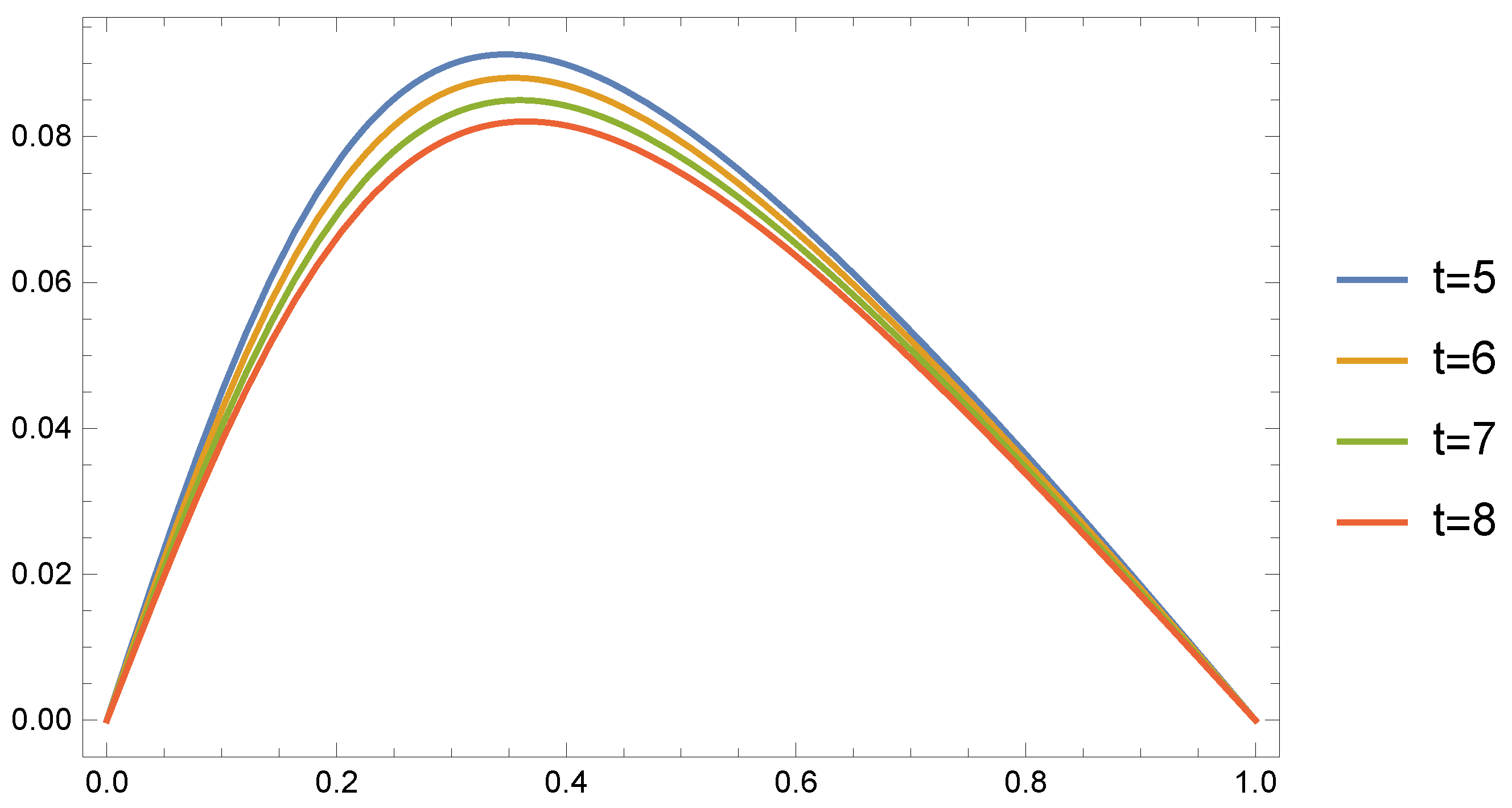
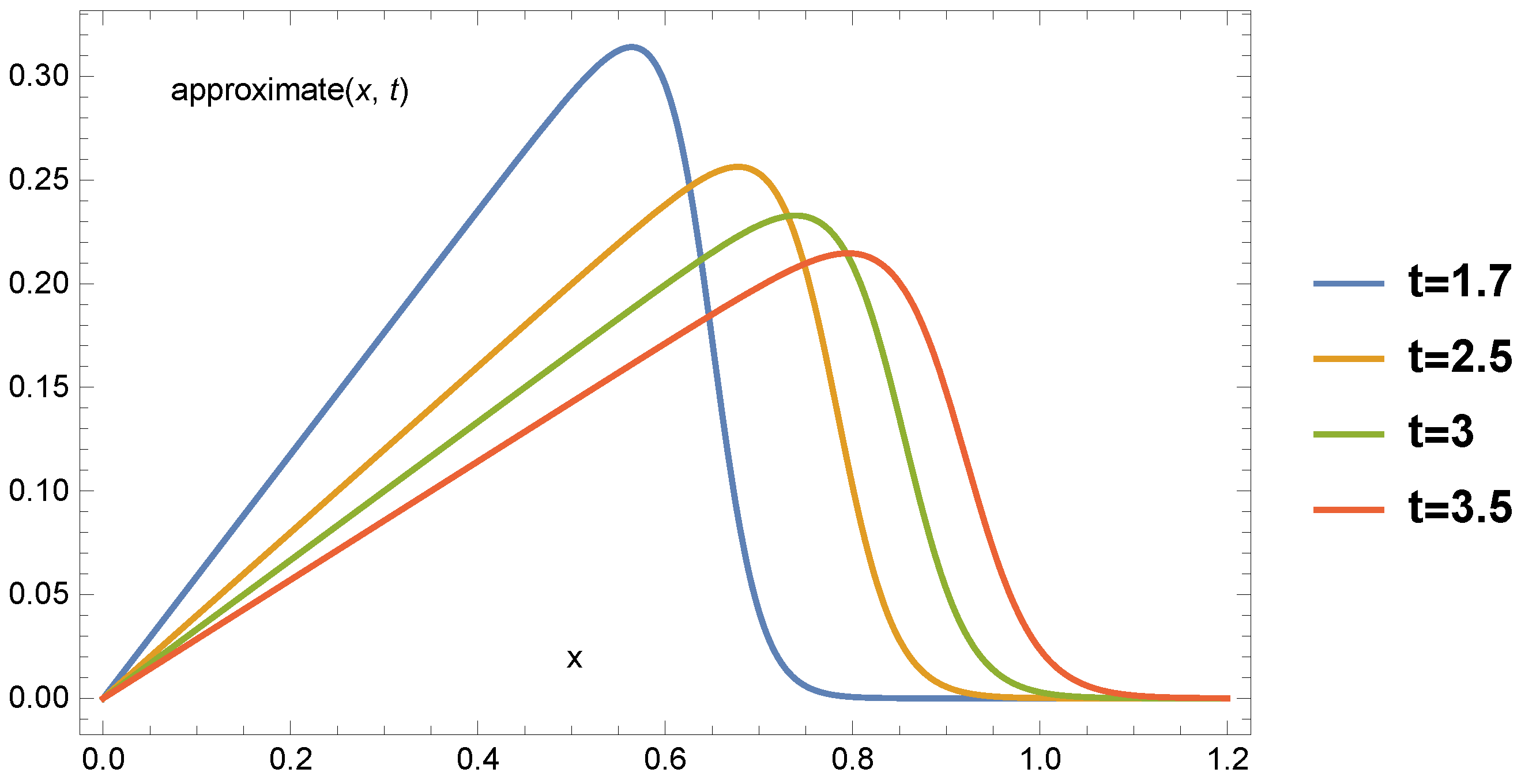
6. Numerical Experiments and Comparisons
7. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kim, T.; Kim, D.S.; Lee, H.; Kwon, J. studies in sums of finite products of the second, third, and fourth kind Chebyshev polynomials. Mathematics 2020, 8, 210. [Google Scholar] [CrossRef] [Green Version]
- Leong, Y.; Cheab, S.; Soeung, S.; Wong, P.W. A new class of dual-band waveguide filters based on Chebyshev polynomials of the second kind. IEEE Access 2020, 8, 28571–28583. [Google Scholar] [CrossRef]
- Oloniiju, S.D.; Goqo, S.P.; Sibanda, P. A Chebyshev pseudo-spectral method for the multi-dimensional fractional Rayleigh problem for a generalized Maxwell fluid with Robin boundary conditions. Appl. Numer. Math. 2020, 152, 253–266. [Google Scholar] [CrossRef]
- Lashenov, K.V. On a class of orthogonal polynomials. Sci. Notes Leningr. Gov. Pedagog. Inst. 1953, 89, 167–189. [Google Scholar]
- Masjed-Jamei, M. Some New Classes of Orthogonal Polynomials and Special Functions: A Symmetric Generalization of Sturm-Liouville Problems and its Consequences. Ph.D. Thesis, Department of Mathematics, University of Kassel, Kassel, Germany, 2006. [Google Scholar]
- Abd-Elhameed, W.M.; Youssri, Y.H. Fifth-kind orthonormal Chebyshev polynomial solutions for fractional differential equations. Comput. Appl. Math. 2018, 37, 2897–2921. [Google Scholar] [CrossRef]
- Abd-Elhameed, W.M.; Youssri, Y.H. Sixth-Kind Chebyshev spectral approach for solving fractional differential equations. Int. J. Nonlinear Sci. Numer. Simul. 2019, 20, 191–203. [Google Scholar] [CrossRef]
- Abd-Elhameed, W.M.; Youssri, Y.H. Neoteric formulas of the monic orthogonal Chebyshev polynomials of the sixth-kind involving moments and linearization formulas. Adv. Differ. Equ. 2021, 2021, 84. [Google Scholar] [CrossRef]
- Jafari, H.; Babaei, A.; Banihashemi, S. A novel approach for solving an inverse reaction–diffusion–convection problem. J. Optim. Theory Appl. 2019, 183, 688–704. [Google Scholar] [CrossRef]
- Pandey, P.; Gómez-Aguilar, J.F. On solution of a class of nonlinear variable order fractional reaction–diffusion equation with Mittag–Leffler kernel. Numer. Methods Partial Differ. Equ. 2021, 37, 998–1011. [Google Scholar] [CrossRef]
- Öztürk, Y. solution for the system of Lane–Emden type equations using Chebyshev polynomials. Mathematics 2018, 6, 181. [Google Scholar] [CrossRef] [Green Version]
- Hassani, H.; Machado, J.A.T.; Avazzadeh, Z.; Naraghirad, E. Generalized shifted Chebyshev polynomials: Solving a general class of nonlinear variable order fractional PDE. Commun. Nonlinear Sci. Numer. Simul. 2020, 85, 105229. [Google Scholar] [CrossRef]
- Habenom, H.; Suthar, D.L. Numerical solution for the time-fractional Fokker–Planck equation via shifted Chebyshev polynomials of the fourth kind. Adv. Differ. Equ. 2020, 2020, 315. [Google Scholar] [CrossRef]
- Duangpan, A.; Boonklurb, R.; Treeyaprasert, T. finite integration method with shifted Chebyshev polynomials for solving time-fractional Burgers’ equations. Mathematics 2019, 7, 1201. [Google Scholar] [CrossRef] [Green Version]
- Canuto, C.; Hussaini, M.; Quarteroni, A.; Zang, T.A. Spectral Methods in Fluid Dynamics; Springer: Berlin, Germany, 1988. [Google Scholar]
- Shizgal, B. Spectral Methods in Chemistry and Physics; Springer: Dordrecht, The Netherlands, 2015. [Google Scholar]
- Hesthaven, J.; Gottlieb, S.; Gottlieb, D. Spectral Methods for Time-Dependent Problems; Cambridge University Press: Cambridge, UK, 2007; Volume 21. [Google Scholar]
- Doha, E.H.; Abd-Elhameed, W.M. On the coefficients of integrated expansions and integrals of Chebyshev polynomials of third and fourth kinds. Bull. Malays. Math. Sci. Soc. 2014, 37, 383–398. [Google Scholar]
- Doha, E.H.; Abd-Elhameed, W.M.; Youssri, Y.H. Efficient spectral-Petrov–Galerkin methods for the integrated forms of third-and fifth-order elliptic differential equations using general parameters generalized Jacobi polynomials. Appl. Math. Comput. 2012, 218, 7727–7740. [Google Scholar] [CrossRef]
- Youssri, Y.H.; Abd-Elhameed, W.M. Numerical spectral Legendre-Galerkin algorithm for solving time fractional telegraph equation. Rom. J. Phys. 2018, 63, 1–16. [Google Scholar]
- Abd-Elhameed, W.M.; Doha, E.H.; Youssri, Y.H.; Bassuony, M.A. New Tchebyshev-Galerkin operational matrix method for solving linear and nonlinear hyperbolic telegraph type equations. Numer. Methods Partial Differ. Equ. 2016, 32, 1553–1571. [Google Scholar] [CrossRef]
- Faghih, A.; Mokhtary, P. An efficient formulation of Chebyshev tau method for constant coefficients systems of multi-order FDEs. J. Sci. Comput. 2020, 82, 6. [Google Scholar] [CrossRef]
- Mohammadi, F.; Cattani, C. A generalized fractional-order Legendre wavelet Tau method for solving fractional differential equations. J. Comput. Appl. Math. 2018, 339, 306–316. [Google Scholar] [CrossRef]
- Doha, E.H.; Abd-Elhameed, W.M. Accurate spectral solutions for the parabolic and elliptic partial differential equations by the ultraspherical tau method. J. Comput. Appl. Math. 2005, 181, 24–45. [Google Scholar] [CrossRef] [Green Version]
- Abd-Elhameed, W.M.; Youssri, Y.H. Spectral tau algorithm for certain coupled system of fractional differential equations via generalized Fibonacci polynomial sequence. Iran. J. Sci. Technol. Trans. A Sci. 2019, 43, 543–554. [Google Scholar] [CrossRef]
- Abd-Elhameed, W.M.; Machado, J.A.T.; Youssri, Y.H. Hypergeometric fractional derivatives formula of shifted Chebyshev polynomials: Tau algorithm for a type of fractional delay differential equations. Int. J. Nonlinear Sci. Numer. Simul. 2021. [Google Scholar] [CrossRef]
- Khader, M.M.; Adel, M. Numerical approach for solving the Riccati and logistic equations via QLM-rational Legendre collocation method. Comput. Appl. Math. 2020, 39, 166. [Google Scholar] [CrossRef]
- Costabile, F.; Napoli, A. Collocation for high order differential equations with two-points Hermite boundary conditions. Appl. Numer. Math. 2015, 87, 157–167. [Google Scholar] [CrossRef]
- Costabile, F.; Napoli, A. A method for high-order multipoint boundary value problems with Birkhoff-type conditions. Intern. J. Comput. Math. 2015, 92, 192–200. [Google Scholar] [CrossRef]
- Saw, V.; Kumar, S. The Chebyshev collocation method for a class of time fractional convection-diffusion equation with variable coefficients. Math. Methods Appl. Sci. 2021, 44, 6666–6678. [Google Scholar] [CrossRef]
- Abd-Elhameed, W.M. On solving linear and nonlinear sixth-order two point boundary value problems via an elegant harmonic numbers operational matrix of derivatives. CMES Comput. Model. Eng. Sci. 2014, 101, 159–185. [Google Scholar]
- Napoli, A.; Abd-Elhameed, W.M. An innovative harmonic numbers operational matrix method for solving initial value problems. Calcolo 2017, 54, 57–76. [Google Scholar] [CrossRef]
- Abd-Elhameed, W.M. New product and linearization formulae of Jacobi polynomials of certain parameters. Integral Transform. Spec. Funct. 2015, 26, 586–599. [Google Scholar] [CrossRef]
- Abd-Elhameed, W.M. New formulae between Jacobi polynomials and some fractional Jacobi functions generalizing some connection formulae. Anal. Math. Phys. 2019, 9, 73–98. [Google Scholar] [CrossRef]
- Abd-Elhameed, W.M.; Ali, A. New specific and general linearization formulas of some classes of Jacobi polynomials. Mathematics 2021, 9, 74. [Google Scholar] [CrossRef]
- Abd-Elhameed, W.M.; Youssri, Y.H. New formulas of the high-order derivatives of fifth-kind Chebyshev polynomials: Spectral solution of the convection–diffusion equation. Numer. Methods Partial Differ. Equ. 2021. [Google Scholar] [CrossRef]
- Doha, E.H.; Abd-Elhameed, W.M.; Bassuony, M.A. On the coefficients of differentiated expansions and derivatives of Chebyshev polynomials of the third and fourth kinds. Acta Math. Sci. 2015, 35, 326–338. [Google Scholar] [CrossRef]
- Srivastava, H.M. Some Clebsch-Gordan type linearisation relations and other polynomial expansions associated with a class of generalised multiple hypergeometric series arising in physical and quantum chemical applications. J. Phys. A Math. Gen. 1988, 21, 4463. [Google Scholar] [CrossRef]
- Srivastava, H.M. A unified theory of polynomial expansions and their applications involving Clebsch-Gordan type linearization relations and Neumann series. Astrophys. Space Sci. 1988, 150, 251–266. [Google Scholar] [CrossRef]
- Srivastava, H.M.; Niukkanen, A.W. Some Clebsch-Gordan type linearization relations and associated families of Dirichlet integrals. Math. Comput. Model. 2003, 37, 245–250. [Google Scholar] [CrossRef]
- Hariharan, G.; Swaminathan, G.; Sripathy, B. An efficient operational matrix approach for the solutions of Burgers’ and fractional Burgers’ equations using wavelets. J. Math. Chem. 2021, 59, 554–573. [Google Scholar] [CrossRef]
- Singh, B.K.; Gupta, M. A new efficient fourth order collocation scheme for solving Burgers’ equation. Appl. Math. Comput. 2021, 399, 126011. [Google Scholar]
- Xie, S.S.; Heo, S.; Kim, S.; Woo, G.; Yi, S. Numerical solution of one-dimensional Burgers’ equation using reproducing kernel function. J. Comput. Appl. Math. 2008, 214, 417–434. [Google Scholar] [CrossRef] [Green Version]
- Bratsos, A.G. A fourth-order numerical scheme for solving the modified Burgers equation. Comput. Math. Appl. 2010, 60, 1393–1400. [Google Scholar] [CrossRef] [Green Version]
- Arora, G.; Singh, B.K. Numerical solution of Burgers’ equation with modified cubic B-spline differential quadrature method. Appl. Math. Comput. 2013, 224, 166–177. [Google Scholar] [CrossRef]
- Mittal, R.C.; Jain, R.K. Numerical solutions of nonlinear Burgers’ equation with modified cubic B-splines collocation method. Appl. Math. Comput. 2012, 218, 7839–7855. [Google Scholar] [CrossRef]
- Korkmaz, A.; Dağ, İ. Cubic B-spline differential quadrature methods and stability for Burgers’ equation. Eng. Comput. 2013, 30, 320–344. [Google Scholar] [CrossRef]
- Kukreja, V.K. An improvised collocation algorithm with specific end conditions for solving modified Burgers equation. Numer. Methods Partial Differ. Equ. 2021, 37, 874–896. [Google Scholar]
- Yang, X.J.; Gao, F.; Srivastava, H.M. Exact travelling wave solutions for the local fractional two-dimensional Burgers-type equations. Comput. Math. Appl. 2017, 73, 203–210. [Google Scholar] [CrossRef]
- Cole, J.D. On a quasi-linear parabolic equation occurring in aerodynamics. Q. Appl. Math. 1951, 9, 225–236. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| t | SC6TM | CWPM [41] | Exact | SC6TM | CWPM [41] | Exact | SC6TM | CWPM [41] | Exact |
|---|---|---|---|---|---|---|---|---|---|
| 0.1 | 0.26148 | 0.26147 | 0.26148 | 0.38342 | 0.3834 | 0.38342 | 0.28157 | 0.28156 | 0.28157 |
| 0.15 | 0.16148 | 0.16146 | 0.16148 | 0.23406 | 0.23404 | 0.23406 | 0.16974 | 0.16973 | 0.16974 |
| 0.2 | 0.09947 | 0.09946 | 0.09947 | 0.14289 | 0.14288 | 0.14289 | 0.10266 | 0.10265 | 0.10266 |
| 0.25 | 0.06108 | 0.06107 | 0.06108 | 0.08723 | 0.08721 | 0.08723 | 0.06229 | 0.06229 | 0.06229 |
| x | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 |
|---|---|---|---|---|---|---|---|---|---|
| 1.2 × 10 | 2.4 × 10 | 3.4 × 10 | 5.7 × 10 | 5.2 × 10 | 6.1 × 10 | 6.7 × 10 | 8.1 × 10 | 1.9 × 10 | |
| 1.2 × 10 | 3.2 × 10 | 5.4 × 10 | 6.3 × 10 | 8.2 × 10 | 7.2 × 10 | 7.8 × 10 | 8.3 × 10 | 1.4 × 10 | |
| 1.2 × 10 | 3.2 × 10 | 3.6 × 10 | 5.4 × 10 | 5.5 × 10 | 5.5 × 10 | 6.8 × 10 | 7.1 × 10 | 1.9 × 10 | |
| 3.2 × 10 | 4.2 × 10 | 7.4 × 10 | 6.8 × 10 | 7.3 × 10 | 4.4 × 10 | 7.6 × 10 | 8.6 × 10 | 2.2 × 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abd-Elhameed, W.M. Novel Expressions for the Derivatives of Sixth Kind Chebyshev Polynomials: Spectral Solution of the Non-Linear One-Dimensional Burgers’ Equation. Fractal Fract. 2021, 5, 53. https://doi.org/10.3390/fractalfract5020053
Abd-Elhameed WM. Novel Expressions for the Derivatives of Sixth Kind Chebyshev Polynomials: Spectral Solution of the Non-Linear One-Dimensional Burgers’ Equation. Fractal and Fractional. 2021; 5(2):53. https://doi.org/10.3390/fractalfract5020053
Chicago/Turabian StyleAbd-Elhameed, Waleed Mohamed. 2021. "Novel Expressions for the Derivatives of Sixth Kind Chebyshev Polynomials: Spectral Solution of the Non-Linear One-Dimensional Burgers’ Equation" Fractal and Fractional 5, no. 2: 53. https://doi.org/10.3390/fractalfract5020053